第六章磁电式传感器共29页文档
磁电式传感器课件课件

7.2 霍尔式传感器
不等位电势也可用不等 位电阻表示, 即
图7.2.3 不等位电势示意图
r0
U0 I
由式可以看出,不等位电势就是激励电流流经不等 位电阻r0所产生的电压。
第36页,幻灯) 寄生直流电势(霍尔元件零位误差的一部分)
在外加磁场为零、霍尔元件用交流激励时,霍尔电极输出 除了交流不等位电势外,还有一直流电势,称为寄生直流电 势。
m dd (V t)tc(V t)K V (t)d t m dd 0( V t)t
Av()
(/n)2 1(/n)2[2(/n)2]
v()arc12 tg (( // nn))2
式中,ω——被测振动的角频率;ξ——传感器运动系统的阻尼比 ωn——传感器运动系统的固有角频率
第19页,幻灯片共72页
7.1 磁电感应式传感器
霍尔电场的出现,使定向运动的电子除了受洛伦兹力作
用外,还受到霍尔电场力的作用,其力的大小为eEH,此 力阻止电荷继续积累。随着内、外侧面积累电荷的增加 ,霍尔电场增大,电子受到的霍尔电场力也增大,当电 子所受洛伦磁力与霍尔电场作用力大小相等、方向相反 ,即
eEH=eBv
EH=vB
此时电荷不再向两侧面积累,达到平衡状态。
关于磁电式传感器 课件
第1页,幻灯片共72页
7.1 磁电感应式传感器
磁电式传感器——通过电磁感应原理将被测量(如振
动、转速、扭矩)转换成电势信号。
利用导体和磁场发生相对运动而在导体两端输出感 应电势;属于机-电能量变换型传感器
优点: 不需要供电电源,电路简单,
性能稳定,输出阻抗小
第2页,幻灯片共72页
7.1 磁电感应式传感器
传感器原理及其应用 第6章 磁电式传感器

材料(单晶) N型锗(Ge) N型硅(Si) 锑化铟(InSb)
1/ 2
4000 1840 4200
砷化铟(InAs)
磷砷铟(InAsP) 砷化镓(GaAs)
0.36
0.63 1.47
0.0035
0.08 0.2
25000
10500 8500
100
850 1700
1530
3000 3800
哪种材料制作的霍尔元件灵敏度高
1、8—圆形弹簧片;2—圆环形阻尼器;3—永久磁铁;4—铝架; 5—心轴;6—工作线圈;7—壳体;9—引线 工作频率 固有频率 灵敏度 10~500 Hz 12 Hz 最大可测加速度 5g 可测振幅范围 精度 ≤10% 45mm×160 mm 0.7 kg
0.1~1000 m 外形尺寸 1.9 k 质量
d E N dt
武汉理工大学机电工程学院
第6章 磁电式传感器
磁通量的变化可以通过很多办法来实现,如磁铁与线圈之间作 相对运动;磁路中磁阻的变化;恒定磁场中线圈面积的变化等, 一般可将磁电感应式传感器分为恒磁通式和变磁通式两类。 6.1.1 恒磁通式磁电感应传感器结构与工作原理 恒磁通式磁电感应传感器结构中,工作气隙中的磁通恒定,感 应电动势是由于永久磁铁与线圈之间有相对运动——线圈切割 磁力线而产生。这类结构有动圈式和动铁式两种,如图所示。
武汉理工大学机电工程学院
第6章 磁电式传感器 磁铁与线圈相对运动使线圈切割磁力线,产生与运动速度dx/dt 成正比的感应电动势E,其大小为
dx E NBl dt
式中:N为线圈在工作气隙磁场中的匝数;B为工作气隙磁感应 强度;l为每匝线圈平均长度。 当传感器结构参数确定后,N、B和l均为恒定值,E与dx/dt成正 比,根据感应电动势E的大小就可以知道被测速度的大小。 由理论推导可得,当振动频率低于传感器的固有频率时,这种传 感器的灵敏度(E/v)是随振动频率而变化的;当振动频率远大于 固有频率时,传感器的灵敏度基本上不随振动频率而变化,而近 似为常数;当振动频率更高时,线圈阻抗增大,传感器灵敏度随 振动频率增加而下降。 不同结构的恒磁通磁电感应式传感器的频率响应特性是有差异的, 但一般频响范围为几十赫至几百赫。低的可到10 Hz左右,高的可 达2 kHz左右。
第六章磁电式传感器
2.磁电感应式传感器
由上述工作原理可知,磁电感应式传 感器只适用于动态测量,可直接测量振动 物体的速度或旋转体的角速度。如果在其 测量电路中接入积分电路或微分电路,那 么还可以用来测量位移或加速度。
20
2.磁电感应式传感器
三、磁电式传感器的应用
(一)磁电感应式振动速度传感器 以CD-1型为例,它是一种绝对振动传感器,主要技
应电势为:
E d
dt
7
2.磁电感应式传感器
如果线圈是N匝,磁场强度是B,每匝线圈
的平均长度L,线圈相对磁场运动的速度为 :υ=dx/dt,则整个线圈中所产生的电动势为:
E N d NBL dx NBL
dt
dt
8
2.磁电感应式传感器
感应电动势的种类:动生电动势和感生电 动势。
(1)动生电动势是因为导体自身在磁场中 做切割磁感线运动而产生的感应电动势,其方向 用右手定则判断。
2
2.磁电感应式传感器
磁电感应式传感器简称感应式传感器,是 利用通过回路面积的磁通量发生变化,从而回 路中产生感应电动势而工作的,属于机-电能量 变换型传感器。 优点: 1.不需要供电电源,电路简单, 2.性能稳定,输出阻抗小 3.具有一定的工作带宽(10~1000 Hz) 缺点: 尺寸、质量较大
29
3.霍尔式传感器
(一)霍尔传感器工作原理 (二)霍尔元件的结构和基本电路 (三)霍尔元件的主要特性参数 (四)温度误差及其补偿
30
3.霍尔式传感器
霍尔传感器是利用半导体材料的霍尔效应进行测量 的一种传感器。1879年美国物理学家霍尔首先在金属 材料中发现了霍尔效应,但金属材料的霍尔效应太弱而 没有得到应用。随着半导体技术的发展,由于霍尔效应 的显著特性使霍尔传感器得到了广泛的应用。它可以直 接测量磁场及微位移量,也可以间接测量液位、压力等 工业生产过程参数。目前霍尔传感器已从分立元件发展 到了集成电路的阶段,正越来越受到人们的重视,应用 日益广泛。1 NhomakorabeaIB
第6章 磁电式传感器
15
6.2 霍尔式传感器
传感器与检测技术
6.2.1 霍尔效应 在磁场中导体自由电子在磁场的作用下做定向运动。 每个电子受洛仑兹力作用被推向导体的另一侧:
FL e B
霍尔电场作用于电子的力
FH eEH
霍尔电场
UH EH b
16
6.2 霍尔式传感器
6.2.1 霍尔效应
传感器与检测技术
传感器与检测技术
动圈式振动速度传感器
11
6.1 磁电感应式传感器(电动式)
6.1.3 磁电感应式传感器的应用 信号输出送测量电路 • 接入积分电路测量位移; • 接入微分电路测量加速度。
传感器与检测技术
12
6.1 磁电感应式传感器(电动式)
6.1.3 磁电感应式传感器的应用
传感器与检测技术
磁电式振动传感器的特性:
磁敏传感器
电 信 号
3
概述
传感器与检测技术
磁电传感器 霍尔传感器测转速
4
6.1 磁电感应式传感器(电动式)
6.1.1 工作原理
传感器与检测技术
根据电磁感应定律,N匝线圈在磁场中运动切割磁 力线,线圈内产生感应电动势e。e的大小与穿过线圈 的磁通Φ变化率有关。
d e N dt
e BlN0
传感器与检测技术
代入后:
IB IB U H Bb RH K H IB ned d
霍尔常数
1 RH ne
与材料有关
霍尔灵敏度
KH
RH d
与薄片尺寸有关
18
6.2 霍尔式传感器
6.2.1 霍尔效应
传感器与检测技术
讨论: 任何材料在一定条件下都能产生霍尔电势,但不 是都可以制造霍尔元件 • 绝缘材料电阻率很大,电子迁移率很小,不适用; • 金属材料电子浓度很高,RH很小,UH很小。 • 半导体电子迁移率一般大于空穴的迁移率,所以 霍尔元件多采用N型半导体(多电子)。 由上式可见,厚度d越小,霍尔灵敏度 KH 越大, 所以霍尔元件做的较薄,通常近似1微米。
磁电式传感器介绍课件

通过改进材料和结构设计,提高磁电式传感器的温度稳定性,使其在宽温范围内仍能保 持稳定的性能。
降低成本与推广应用
降低制造成本
优化生产工艺和降低原材料成本,以降 低磁电式传感器的制造成本,使其更具 市场竞争力。
VS
标准化与互操作性
推动磁电式传感器的标准化和互操作性, 促进不同厂商之间的传感器兼容性和互换 性,降低使用成本。
振动与冲击测量
振动传感器
磁电式传感器能够将机械振动转化为 电信号,实现振动的测量。在结构健 康监测、地震工程等领域有广泛应用 。
冲击传感器
磁电式传感器能够测量冲击波或冲击 力的强度和方向,常用于爆炸测试、 武器系统等领域的安全监测和防护。
05
磁电式传感器的未来发展与挑 战
新材料与新技术的应用
高性能磁性材料
高灵敏度
01
磁电式传感器采用磁电转换原理 ,能够将磁场变化转化为电信号 ,具有较高的灵敏度,能够检测 微弱的磁场变化。
02
高灵敏度使得磁电式传感器在测 量弱磁场、低磁场变化率以及微 小位移等方面具有显著优势。
宽测量范围
磁电式传感器的测量范围较广,能够 适应不同大小和类型的磁场。
宽测量范围使得磁电式传感器在各种 磁场环境下都能实现精确测量,具有 广泛的应用领域。
线圈设计还需要考虑到线圈的散热性能和绝缘性能,以确保传感器能够长时间稳定 运行。
材料选择与加工工艺
01
02
03
04
材料选择与加工工艺是影响磁 电式传感器性能的重要因素。
在材料选择方面,需要考虑到 材料的磁性能、机械性能和稳
定性等因素。
在加工工艺方面,需要考虑到 加工精度、表面处理和装配工
艺等因素。
第6章磁电式传感器-课件

传感器原理及应用
6.2 霍尔式传感器
➢ 测磁的方法:
①利用电磁感应作用的传感器(强磁场) 如:磁头、机电设备、测转速、磁性标定、差动变压器; ②利用磁敏电阻、磁敏二极管、霍尔元件测量磁场; ③利用超导效应传感器,SQVID 约瑟夫元件; ④利用核磁共振的传感器,有光激型、质子型。 ⑤利用磁作用传感器,磁针、表头、继电器;
此处加标题
第6章磁电式传感器
眼镜小生制作
第6章 磁电式传感器
主要内容:
传感器原理及应用
6.1 磁电感应式传感器 6.2 霍尔式传感器
第6章 概述
磁电式传感器
传感器原理及应用
➢磁电式传感器是利用电磁感应原理,通过检测磁场的变化 将运动的速度、位移、振动等物理量转换成线圈中的感应电 动势输出。
➢导体和磁场发生相对运动时,在导体两端有感应电动势输 出,磁电感应式传感器工作时不需要外加电源,可直接将被 测物体的机械能转换为电量输出。是典型的有源传感器。
•
接入微分电路可测量加速度信号。
esv x vt
a
dv dt
第6章 磁电式传感器 传感器原理及应用
6.1 磁电感应式传感器(电动式) 6.1.3 测量电路
If C
❖ 速度经积分电路 可测量位移
Ii
根据 esv x vt
-
ui R
+
u0
理想运放 U U 0 Ii If ui /R
设电容上初始电压为零,输出电压是输入电压对时间积分
②动钢型
线圈与壳体固定
动圈型
传感器原理及应用
动钢型
恒磁通式测振动
第6章 磁电式传感器
6.1 磁电感应式传感器(电动式) 6.1.1 工作原理
第6章-磁电磁敏式传感器
• 测速度时,传感器的输出电压正比于速度信号 u v ,可
以直接放大。
• 输出功率大,稳定可靠,但传感器尺寸大、重,输出阻抗 低,通常几十~几千欧,对后置电路要求低,干扰小。
CD-1 型震动速度传感器
工作频率 固有频率 灵敏度
• 磁阻元件在工作时通常需要加偏置磁 场,使磁敏电阻工作在线性区域。
• 无偏置磁场时只能检测磁场不能 判别磁性。输出弱磁场时磁阻与 磁场关系为:
R =R0(1+MB2)
R0 ——为零磁场内阻; M ——为零磁场系数;
• 外加偏置磁场时磁阻具有极性, 相当在检测磁场外加了偏置磁场, 工作点移到线性区,磁极性也作 为电阻值变化表现出来,这时电 阻值的变化为:
代入后:
UH
Bb
IB ned
RH
IB d
K H IB
霍尔常数
RH
1 ne
与材料有关
霍尔灵敏度
KH
RH d
与薄片尺寸有关
式中:ρ—电阻率、n —电子浓度、μ—电子迁移率 μ = υ / E 单位电场强度作用下载流子运动速度。
☻ 可见霍尔电势与电流和磁场强度的乘积成正比
U K I B ☻ 讨论 H
敏 元
件
6.3.1 磁敏电阻
(1) 磁阻效应
➢ 载流导体置于磁场中,除了产生霍尔效应外,导体中载流子 因受洛仑兹力作用要发生偏转,磁场使载流子运动方向的偏 转使电流路径变化,起到了加大电阻的作用,磁场越强增大 电阻的作用越强。
☺ 外加磁场使导体(半导体)电阻随磁场增加而增大的现象 称磁阻效应。
➢ 磁阻效应表达式为
第6章磁电式传感器
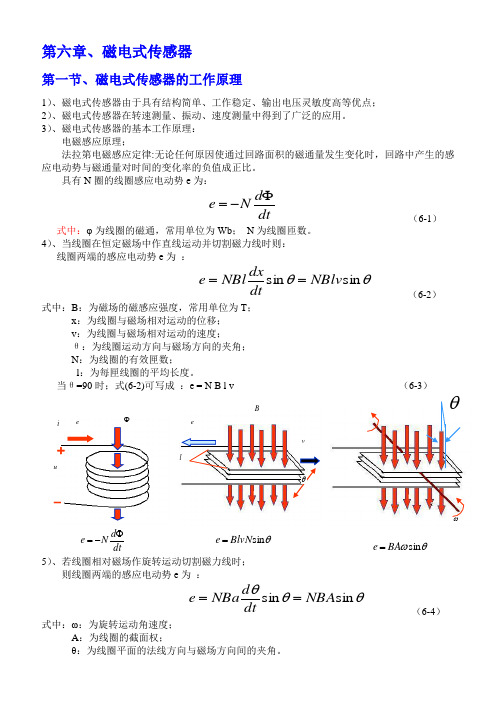
第六章、磁电式传感器第一节、磁电式传感器的工作原理1)、磁电式传感器由于具有结构简单、工作稳定、输出电压灵敏度高等优点; 2)、磁电式传感器在转速测量、振动、速度测量中得到了广泛的应用。
3)、磁电式传感器的基本工作原理:电磁感应原理;法拉第电磁感应定律:无论任何原因使通过回路面积的磁通量发生变化时,回路中产生的感应电动势与磁通量对时间的变化率的负值成正比。
具有N 圈的线圈感应电动势e 为:dt d Ne Φ-= (6-1)式中:φ为线圈的磁通,常用单位为Wb ; N 为线圈匝数。
4)、当线圈在恒定磁场中作直线运动并切割磁力线时则:线圈两端的感应电动势e 为 :θθsin sin NBlv dtdxNBl e == (6-2)式中:B :为磁场的磁感应强度,常用单位为T ;x :为线圈与磁场相对运动的位移; v :为线圈与磁场相对运动的速度;θ:为线圈运动方向与磁场方向的夹角; N :为线圈的有效匣数;l :为每匣线圈的平均长度。
当θ=90时;式(6-2)可写成 :e = N B l v (6-3);5)、若线圈相对磁场作旋转运动切割磁力线时;则线圈两端的感应电动势e 为 :θθθsin sin NBA dtd NBae == (6-4)式中:ω:为旋转运动角速度;A :为线圈的截面权;θ:为线圈平面的法线方向与磁场方向间的夹角。
Φ-+ueivBleθωθsin BlvN e =θωsin BA e =当θ=90时,式(6-4)可写成 :e = N B A ω (6-5)当N 、B 、A 、l 为定值时,感应电动势e 与线圈和磁场的相对运动速度v (或ω)成正比。
由于速度和位移、加速度之间是积分、微分的关系,因此只要适当加入积分、微分电路,便能通过测量感应电动势得到位移和加速度。
第二节、磁电式传感器的结构与应用如前所述,可以用改变磁通方法或用线圈切割磁力线方法产生感应电动势;所以磁电式传感器可以分为:变磁通式、恒磁通式两种类型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
③霍尔元件的灵敏度KH与霍尔常数RH成正比而与霍尔片厚度d成 反比。所以,为了提高灵敏度,霍尔元件常制成薄片形状。
④当控制电流方向或磁场方向改变时,输出电动势方向也将改变。
2.霍尔参数
一般金属材料载流子迁移率很高,但电阻率很小; 而绝缘材料电阻率极高,但载流子迁移率极低。 故只有半导体材料适于制造霍尔片。
第六章 磁电式传感器
6.1 磁电感应式传感器 6.2 霍尔式传感器
第一节 磁电感应式传感器
磁电感应式传感器有时又简称为磁电传感 器,是利用电磁感应原理将被测量(如振 动、位移、转速等)转换成电信号的一种 传感器。
它不需要辅助电源就能把被测对象的机械 量转换成易于测量的电信号,是有源传感 器。
1—限幅器; 2—壳体; 3—弹簧片; 4—芯轴; 5—磁钢; 6—线圈; 7—阻尼环; 8—输出线
该传感器测量的是振动速度参数,若在测量电路中接入积 分电路,则输出电势与位移成正比;若在测量电路中接入 微分电路,则其输出与加速度成正比。
3.磁电式扭矩传感器
传感器的检测元件部分由永久磁场、感应线圈和铁芯组成。 永久磁铁产生的磁力线与齿形圆盘交链。当齿形圆盘旋转 时,圆盘齿凸凹引起磁路气隙的变化,于是磁通量也发生 变化,在线圈中感应出交流电压,其频率等于圆盘上齿数 与转数乘积。
线圈两端的感应电动势e为:
当θ=90°时,上式可写成:
EWB siL n EWBL
(2)线圈在恒定磁场中作旋转运动
线圈两端的感应电动势为: EWB sS in
当γ=90°时,上式可写成: EWBS
ω—旋转运动角速度;S—线圈的截面积; γ—线圈平面的法线方向与磁场方向间的夹角。
由于速度和位移、加速度之间是积分、微分的关系,因此 只要适当加人积分、微分电路,便能通过测量感应电动势 得到位移和加速度。
一、霍尔效应及其参数
1.霍尔效应 在置于磁场中的导体或半导体内通入电流,若电流与磁场垂
直,则在与磁场和电流都垂直的方向上会出现一个电势差, 这种现象称为霍耳效应。
FL的方向在图中是向上 的,此时电子除了沿电 流反方向作定向运动外, 还在FL的作用下向上漂 移,结果使导电体上底 面积累电子,而下底面 积累正电荷,从而形成 了附加内电场EH,此内 电场称为霍尔电场
第二节 霍尔式传感器
霍尔传感器是基于霍尔效应的一种传感器。 1879年美国物理学家霍尔首先在金属材料 中发现了霍尔效应,但由于金属材料的霍 尔效应太弱而没有得到应用。
随着半导体技术的发展,开始用半导体材 料制成霍尔元件,由于它的霍尔效应显著 而得到应用和发展。
霍尔传感器广泛用于电磁测量、压力、加 速度、振动等方面的测量。
二、磁电感应式传感器的结构
1.变磁通式磁电传感器 这类磁电式传感器中,产生磁场的永久磁铁和线圈都固定
不动,而是通过磁通的变化产生感应电动势。
变磁通式磁电传感器
2.恒磁通式磁电传感器
工作气隙中的磁通保持不变,而线圈中的感应电动势是由于工 作气隙中的线圈与磁钢之间作相对运动,线圈切割磁力线产生 的。其值与相对运动速度成正比。
(a)霍耳效应; (b)霍耳元件结构; (c)图形符号; (d)外形 图6-7 霍耳效应与霍耳元件
霍尔电压
UHUnIB edRHIdB KHIB
RH为霍尔常数
RH
1 ne
KH称为霍尔片的灵敏度
KH
RH d
霍尔常数 的意义: ①霍尔电势UH的大小正比于激励电流I和磁感应强度B的乘积。 ②霍尔元件的灵敏度KH是表征在单位磁感应强度和单位控制电流
由于它输出功率大且性能稳定,具有一定 的工作带宽(10~1000Hz),所以得到普 遍应用。
一、磁电感应式传感器工作原理
1.电磁感应定律 根据电磁感应定律:无论任何原因是通过回路面积的磁通量
发生变化时,回路中产生的感应电动势与磁通量对时间的变 化率的负值成正比。
2.电磁感应定律的应用 (1)线圈在恒定磁场中作直线运动
(2)磁电式转速传感器
国产SZMB-3型磁电式转速传感器使用时,该传感器通过 联轴节与被测轴连接,当转轴旋转时将角位移转换成电脉 冲信号,供二次仪表使用。该传感器每转输出60个脉冲, 输出信号幅值大于或等于300mV(50r/rain时),测速范围 为50~5000r/min。
国产SZMB-5型磁电式转速传感器使用时,该传感器输出 信号的波形为近似正弦波,幅值与SZMB—3型相同。工作 时,信号幅值大小与转速成正比,与铁心和齿顶间隙的大 小成反比。被测齿轮的模数m=2,齿数z=60,传感器铁 心和被测齿顶间隙δ=0.5mm,测量范围为50~5000r/ min。
(1)电流输出特性
①磁电传感器的输出电流Io为:I0
E RR1
B0LW
RRf
②传感器的电流灵敏度为:
(2)电压输出特性 ①传感器的输出电压为:
SI
I V
B0LW R Rf
U0 I0Rf
B0LwvfR RRf
②传感器的电压灵敏度为:
SU
U0 B0LwRf v RRf
2.磁电感应式传感器的测量电路
由永久磁铁、线圈、弹簧、
(a)动圈式;
(b)动铁式
恒磁通式磁电传感器结构
统产生恒定的直流磁场,磁 路中的工作气隙固定不变, 因而气隙中磁通也是恒定不 变的。其运动部件可以是线 圈(动圈式),也可以是磁 铁(动铁式),动圈式和动 铁式的工作原理是完全相同 的。
三、磁电感应式传感器的特性
1.磁电式传感器的基本特性
磁电式传感器测量电路方框图
四、磁电感应式传感器的应用
1.磁电式转速传感器 (1)磁电式转速传感器的结构 根据磁路形式,可分为开磁路式和闭磁路式。 根据形成磁场的方式,分为永磁型和励磁型两种
结构类型 根据极靴的结构形式又可分为单极型、双极型和
齿型三种结构类型。 根据安装形式,又可分为分离式和整体式。
(3)磁电式转速传感器的计算
若设齿轮பைடு நூலகம்数为z,转速为n(r/min),则有:
T 60
f zn
zn 或: 60
T—感应电动势周期;f—感应电动势频率。
表明,传感器输出电动势的频率与被测转速成正比。因此, 只要将该电动势放大整形成矩形波信号,送到计数器或频 率计中,即可由频率测出转速。
2.动圈式振动速度传感器