智能控制理论及应用..共26页
智能控制技术毕业论文【范本模板】
摘要:本文主要介绍了智能控制技术从经典控制理论、现代控制理论发展到今天的智能控制理论的发展过程和主要方法,并介绍了智能控制在工业发展、机械制造、电力电子学研究领域中的应用.关键字:自动化智能控制应用随着信息技术的发展,许多新方法和技术进入工程化、产品化阶段,这对自动控制技术提出犷新的挑战,促进了智能理论在控制技术中的应用,以解决用传统的方法难以解决的复杂系统的控制问题。
一、智能控制的发展过程从经典控制理论、现代控制理论发展到今天的智能控制理论,经历了很长时间.四十年代到五十年代形成了经典控制理论。
经典控制理论中基于传递函数建立起来的如频率特性、根轨迹等图解解析设计方法,对于单输入—单输出系统极为有效,至今仍在广泛地应用。
但传递函数对处于系统内部的变量不便描述,对某些内部变量还不能描述,且忽略了初始条件的影响。
鼓传递函数描述不能包含系统的所有信息。
现代控制理论主要研究具有高性能、高精度的多变量变参数系统的最优控制问题,它对多变量有很强的描述和综合能力,其局限在于必须预先知道被空对象或过程的数学模型.智能控制是在经典和现代控制理论基础上进一步发展和提高的。
智能控制的提出,一方面是实现大规模复杂系统控制的需要;另一方面是现代计算机技术、人工智能和微电子学等学科的高度发展,给智能控制提供了实现的基础。
智能控制提供了一种新的控制方法,基本解决了非线性、大时滞、变结构、无精确数学模型对象的控制问题。
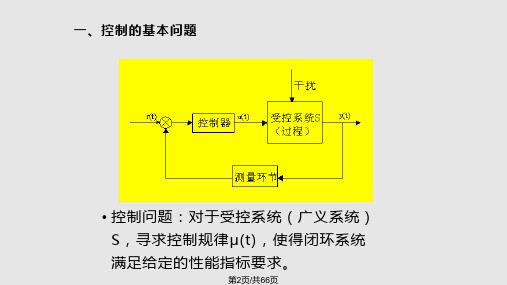
二、智能控制的主要方法通俗地讲,智能控制就是利用有关知识(方法)来控制对象,按一定要求达到预定目的。
智能控制为解决控制领域的难题,摆脱了经典和现代控制理论的困境,开辟了新的途径.智能控制技术的主要方法有模糊控制、基于知识的专家控制、神经网络控制和集成智能控制等,以及常用优化算法有:遗传算法、蚁群算法、免疫算法等。
1、模糊控制模糊控制以模糊集合、模糊语言变量、模糊推理为其理论基础,以先验知识和专家经验作为控制规则。
现代控制理论
3.1 自动控制理论的发展
3.1.2自动控制理论的发展
该二阶线性系统的输出方程为
x y x1 1 0 1 x2
将以上两组个方程用矩阵形式表示:
y C x
其中
x A x B u(t )
x x 1 x2
1 0 A b a 0 B 1
dy dt
则该二阶线性系统的动态特性可用状态方程表示为 :
x1 x2 x bx ax u(t ) 1 2 2
或
1 x1 0 x1 0 x x 1 u(t ) 2 b a 2
14
3.1 自动控制理论的发展
3.1.2自动控制理论的发展 智能控制理论
智能控制理论的 主要描述方法
智能控制(Intelligent Control)是人工智能和自动控制的结合物。智能 控制用于生产过程,让计算机系统模仿专家或熟练操作人员的经验,建立起 以知识为基础的广义模型(知识模型),采用知识表示和自学习、推理与决 策等智能化技术,对外界环境和系统过程进行理解、判断、预测和规划,使 被控对象按一定要求达到预定的目的。
5
3.1 自动控制理论的发展
3.1.2自动控制理论的发展
自动控制理论自创立至今已经经过了三代的发展:第一代为20世纪初开始形成并于50年代趋于成熟的经典反 馈控制理论;第二代为50、60年代在线性数学基础上发展起来的现代控制理论;第三代为60中期即已萌芽, 在发展过程中综合了人工智能、自动控制、信息论等多学科的最新成果并在此基础上形成的智能控制理论。
,即已知系统的“状态”].
0) 可以看出,在经典控制理论的描述方法下,通常只能知道(或只关注)系统在某一时刻 t 0 的输出 y (t,那 么,即使给定该时刻系统的控制作用,也无法准确确定系统在下一个时刻的输出,当然也无法准确判断所施 加的控制作用的合理性(二阶系统的状态:位置+速度)。
智能控制及其应用综述
智能控制及其应用综述
李文;欧青立;沈洪远;伍铁斌
【期刊名称】《重庆邮电大学学报(自然科学版)》
【年(卷),期】2006(018)003
【摘要】介绍了智能控制的产生背景以及智能控制的概念、性能和特点,分析了几种典型的智能控制技术及当前的工程应用现状.最后,对今后智能控制的发展前景进行了展望.
【总页数】6页(P376-381)
【作者】李文;欧青立;沈洪远;伍铁斌
【作者单位】湖南科技大学,信息与电气工程学院,湖南,湘潭,411201;湖南科技大学,信息与电气工程学院,湖南,湘潭,411201;湖南科技大学,信息与电气工程学院,湖南,湘潭,411201;湖南科技大学,信息与电气工程学院,湖南,湘潭,411201
【正文语种】中文
【中图分类】TP18
【相关文献】
1.粗集理论及其在智能控制中的应用综述 [J], 刘知贵;梁辰;黄正良;蒲洁
2.智能控制理论及应用综述 [J], 薛荣辉
3.智能控制理论及应用综述 [J], 薛荣辉
4.神经网络在智能控制系统中的应用——评《智能控制系统及其应用》 [J], 潘夏福
5.神经网络在智能控制系统中的应用——评《智能控制系统及其应用》 [J], 潘夏福
因版权原因,仅展示原文概要,查看原文内容请购买。
现代控制理论浙大
三、现代控制理论与古典控制理论的对比
• 共同 对象-系统 主要内容 分析:研究系统的原理和性能 设计:改变系统的可能性(综合性能)
用 • 区别
古典
研究对象:单入单出(SIS0)系统,线性定常 工具:传递函数(结构图),已有初始条件为零时才适
试探法解决问题 : PID串联、超前、滞后、反馈
整理得一阶微分方程组为
Ri (t )
L
di(t) dt
uc
u(t)
duc(t) 1 i(t) dt C
i(t) C duc dt
di(t) dt
1 L
uc
(t)
R L
i(t)
1 L
u(t)
即
x1 (t )
1 C
x2 (t)
状态方程
x2
(t)
1 L
x1 (t )
R L
x2
(t)
1 L
u(t)
状态空间 表达式
研究对象:多入多出(MIMO)系统、
线性定常、非线性、时变、
第9页/共66页
现代控制理论预览
可控性 可观性 稳定性
建模 分析 设计
状态空间 表达式
建立 求解 转换
状态反馈 状态观测器 最优控制
第10页/共66页
第一章 控制系统的状态空间表达式
主要内容: • 状态变量及状态空间表达式 • 状态变量及状态空间表达式的系统结构图 • 状态变量及状态空间表达式的建立 • 状态矢量的线性变换 • 从状态空间表达式求传递函数阵
(1) 专家系统;(2)模糊控制,人工智能 (3) 神经网络,人脑模型;(4)遗传算法 控制理论与计算机技术相结合→计算机控制技术
第7页/共66页
自动化控制系统理论及应用方法

自动化控制系统理论及应用方法自动化控制系统是现代工业生产中的重要组成部分,其理论和应用方法在提高生产效率、降低成本、保障产品质量等方面起到了重要作用。
本文将从系统理论、控制方法和应用案例等方面进行论述,以帮助读者更好地了解自动化控制系统。
一、系统理论自动化控制系统是由各种元件和设备组成的复杂系统,其核心在于对输入信号进行处理,并输出相应的控制指令。
系统理论是研究自动化控制系统的基础,它涉及到控制系统的组成、结构、性能和稳定性等方面。
系统理论主要包括传递函数、状态空间和频域分析等内容。
传递函数是描述线性时不变系统动态特性的重要工具。
它将系统的输入和输出之间的关系用一种数学形式表示出来,可以通过分析传递函数的特性来设计控制器,使得系统达到期望的控制效果。
状态空间则是描述系统状态随时间变化的数学模型,其优点在于可以考虑系统的非线性和时变性。
频域分析则是通过对输入信号进行傅里叶变换,将时域信号转化为频域信号,从而分析系统的频率响应和稳定性。
二、控制方法自动化控制系统有多种控制方法,其中常见的有PID控制、模糊控制和神经网络控制。
PID控制(比例-积分-微分控制)是最常见的控制方法之一,它通过对误差进行比例、积分和微分处理,产生相应的控制指令。
PID控制具有简单、实用和稳定的特点,广泛应用于工业生产和自动化设备中。
模糊控制是一种基于模糊逻辑的控制方法,它利用模糊集合和模糊规则来表示和处理不确定性和模糊性信息。
模糊控制通过建立模糊规则库和运用推理机制,实现对系统的自适应控制。
神经网络控制是一种基于人工神经网络的控制方法,它通过训练神经网络,使其具备学习和自适应的能力,从而实现对系统的控制。
神经网络控制适用于非线性和复杂系统,具有良好的控制性能。
三、应用案例自动化控制系统广泛应用于各个行业,以下是一些常见的应用案例。
1. 工业生产控制:自动化控制系统在工业生产中起到了重要作用,可以实现对生产过程的监测和控制,提高生产效率和产品质量。
智能控制理论及其应用-教学大纲

《智能控制理论及应用》教学大纲课程名称:智能控制理论及应用课程编号:0811010006课程学时:36学时课程学分:2适用专业:控制理论与控制工程课程性质:专业方向课先修课程:《高等数学》、《自动控制原理》、《现代控制理论》大纲执笔人:编写时间:2006年9月一、课程目的与要求本课程主要讲授模糊控制、神经网络控制和遗传算法控制等。
通过本课程的学习,可使学生熟悉智能控制的主要理论分支、数学基础、应用场合及发展趋势,掌握智能控制的理论基础及其在实际控制系统中的应用方法。
二、教学内容及学时安排(一)绪论:2学时主要介绍智能控制定义、智能控制的主要类型、智能控制的产生和发展,(二)模糊控制:10学时2.1模糊控制的数学基础2.2模糊语言变量与模糊语句2.3模糊推理2.4模糊控制器的工作原理2.5模糊控制仿真应用实例(三)神经网络控制:8学时3.1人工神经网络基础3.2 BP网络3.3径向基函数网络3.4 Hopfield网络3.5神经网络系统辨识3.6神经网络控制及应用(四)模糊神经网络控制:2学时4.1模糊神经网络基本思想4.2模糊神经网络结构4.3模糊神经网络控制原理4.4模糊神经网络控制应用(五)遗传算法:8学时5.1遗传算法的基本操作5.2遗传算法实现与改进5.3遗传算法在智能控制中应用(六)专家系统:2学时6.1专家系统基本思想6.2专家系统的应用(七)应用讨论:4学时主要探索智能控制方法在工程中应用三、教材及主要参考书无教材,主要参考书目《智能控制理论与技术》孙增圻编,清华大学出版社,2004.10《智能控制理论及应用》王耀南、孙炜编,机械工业大学出版社,2008 四、考核方式考核方式为平时成绩(30%)+期末试卷考试成绩(70%)。
优化算法、智能算法、智能控制技术的特点和应用

优化算法、智能算法、智能控制技术的特点和应用在建立了以频域法为主的经典控制理论的基础上,智能控制技术逐步发展。
随着信息技术的进步新方法和新技术进入工程化、产品化阶段。
这对自动控制理论技术提出了新的挑战,促进了智能理论在控制技术中的应用。
下面介绍了优化算法、智能算法、智能控制技术的特点及应用。
优化算法特点及应用什么是优化?就是从各种方案中选取一个最好的。
从数学角度看,优化理论就是研究如何在状态空间中寻找到全局最优点。
优化算法通常用来处理问题最优解的求解,这个问题有多个变量共同决定的优化算法的一个特点往往给出的是一个局部最优解,不是绝对的最优解,或者说全局最优解。
一种优化算法是否有用很大程度取决问题本身,如果问题本身就是比较无序的,或许随机搜索是最有效的。
常用有3种优化算法:遗传算法、蚁群算法、免疫算法等。
遗传算法是一种基于模拟遗传机制和进化论的并行随机搜索优化算法。
遗传算法在控制领域中,已被用于研究离散时问最优控制、方程的求解和控制系统的鲁棒稳定问题等。
遗传算法用来训练神经网络权值,对控制规则和隶属度函数进行优化,也可用来优化网络结构。
蚁群算法是群体智能的典型实现,是一种基于种群寻优的启发式搜索算法。
蚁群算法小仅能够智能搜索、全局优化,而具有鲁棒性、正反馈、分布式计算、易与其它算法结合等特点。
等人将蚁群算法先后应用于旅行商问题、资源二次分配问题等经典优化问题,得到了较好的效果。
在动态环境下,蚁群算法也表现出高度的灵活性和健壮性,如在集成电路布线设计、电信路山控制、交通建模及规划、电力系统优化及故障分析等方面都被认为是目前较好的算法之一。
智能算法的特点及应用智能计算也有人称之为“软计算”。
是人们受生物界的启迪,根据其原理,模仿求解的算法。
智能计算的思想:利用仿生原理进行设计(包括设计算法)。
常用的智能算法:1)人工神经网络算法、2)遗传算法、3)模拟退火算法、4)群集智能算法。
其应用领域有:神经元和局部电路建模系统神经生物学和神经建模、进化计算、模式识别、信息检索、生物信息学、语音、图像处理、自然语言理解智能控制技术的特点和应用在建立了以频域法为主的经典控制理论的基础上,智能控制技术逐步发展。
智能控制理论及应用PPT课件
20世纪50年代至70年代是神经网络研究的萧条期,但仍有 不少学者致力于神经网络模型的研究;
Albus在1975年提出的CMAC神经网络模型,利用人脑记 忆模型提出了一种分布式的联想查表系统;
Grossberg在1976年提出的自谐振理论(ART)解决了无 导师指导下的模式分类;
到了80年代,人工神经网络进入了发展期:
1985年8月,IEEE在美国纽约召开了第一届智能控制学术 研讨会,会上集中讨论了智能控制的原理和系统结构等问题。 这次会议之后不久,IEEE控制系统学会成立了智能控制专业委 员会。1987年1月,IEEE控制系统学会和计算机学会在美国费 城联合召开了智能控制的第一次国际会议,来自美、欧、日、 中以及其他国家的150余位代表出席了这次学术盛会。
从控制论的角度出发:智能控制是驱动智能机器自主地实 现其目标的过程。或者说,智能控制是一类无需人的干预就能 独立地驱动智能机器实现其目标的自动控制方法。
以上各种描述说明:智能控制具有认知和仿人的功能;能 适应不确定性的环境;能自主处理信息以减少不确定性;能可 靠地进行规划,产生和执行有目的的行为,以获取最优的控制 效果。
1968年扎德首次公开发表其“模糊控制算法”;
1973年他又发表了语言与模糊逻辑相结合的系统建立方法; 1974年伦敦大学Mamdani博士首次尝试利用模糊逻辑,成 功地开发了世界上第一台模糊控制的蒸汽引擎;
1979年T.J.Procky和E.H.Mamdani共同提出了自学习概念, 使系统性能大为改善;
11
18.07.2020
北京科技大学自动化学院控制科学与工程系
1.2 智能控制的发展概况
1.2.1 智能控制的产生 人们将智能控制的产生归结为二大主因,一是自动控制理