振动力学课程设计
振动力学课程设计报告

振动力学课程设计报告课设题目:单位:专业/班级:姓名:指导教师:2011年12月22日一、前言1、课题目的或意义振动力学课程设计是以培养我们综合运用所学知识解决实际问题为目的,通过实践,实现了从理论到实践再到理论的飞跃。
增强了认识问题,分析问题,解决问题的能力。
带着理论知识真正用到实践中,在实践中巩固理论并发现不足,从而更好的提高专业素养。
为认识社会,了解社会,步入社会打下了良好的基础。
通过对GZ电磁振动给料机的振动分析与减振设计,了解机械振动的原理,巩固所学振动力学基本知识,通过分析问题,建立振动模型,在通过软件计算,培养了我们独立分析问题和运用所学理论知识解决问题的能力。
2、课题背景:随着科学技术发展的日新月异,电磁振动给料机已经成为当今工程应用中空前活跃的领域,在生活中可以说是使用的广泛,因此掌握电磁振动给料机技术是很有必要的和重要的。
GZ系列电磁振动给料机广泛应用于矿山、冶金、煤炭、建材、轻工、化工、电力、机械、粮食等各行各业中,用于把块状、颗粒状及粉状物料从贮料仓或漏斗中均匀连续或定量地给到受料装置中去。
特别适用于自动配料、定量包装、给料精度要求高的场合。
例如,向带式输送机、斗式提升机,筛分设备等给料;向破碎机、粉碎机等喂料,以及用于自动配料,定量包装等,并可用于自动控制的流程中,实现生产流程的自动化。
GZ电磁振动给料机的工作原理:GZ电磁振动给料机的给料过程是利用电磁振动器驱动给料槽沿倾斜方向做直线往复运动来实现的,当给料机振动的速度垂直分量大于策略加速度时,槽中的物料将被抛起,并按照抛物线的轨迹向前进行跳跃运动,抛起和下落在1/50秒完成,料槽每振动一次槽中的物料被抛起向前跳跃一次,这样槽体以每分钟3000次的频率往复振动,物料相应地被连续抛起向前移动以达到给料目的。
GZ系列电磁振动给料机主要用途:给到受料装置中去。
GZ系列电磁振动给料机主要特点:1.可无级调节给料量,可用于自动控制的生产流程中,实现生产自动化。
力学振动的教学设计方案

总评成绩达到60分以上为通过。其中,期末考试和课程设计大作业必须分别达 到各自成绩的60%以上。
THANKS
感谢观看
通过案例学习与实践操作相结合的教学方式,学生应能够培养创新思维和实践能力 ,为未来的学习和工作奠定坚实基础。
06
学生自主实践活动安排
活动主题和目标设定
主题:探索力学振动现象及 其在生活中的应用
目标
01
让学生了解力学振动的基本
原理和概念
02
03
培养学生的动手实践能力和 科学探究精神
04
05
引导学生将理论知识应用于 实际生活中,提高解决问题
建立数学模型
根据受力分析,选择合适的数 学模型描述振动系统的运动规 律,如常微分方程、偏微分方 程等。
确定模型参数
通过实验测量或理论计算,确 定数学模型中的各项参数,如
质量、刚度、阻尼等。
线性振动系统分析方法
模态分析法
时域分析法
通过求解系统的特征值和特征向量, 得到系统的固有频率和振型,进而分 析系统的振动特性。
简谐振动及其特性
01
02
03
04
简谐振动的定义
物体在受到与位移成正比的恢 复力作用下的振动称为简谐振
动。
周期性
简谐振动具有周期性,即物体 在振动过程中会不断重复其运
动状态。
对称性
简谐振动的运动轨迹关于平衡 位置对称。
能量守恒
在简谐振动过程中,物体的动 能和势能相互转化,但总能量
保持不变。
阻尼振动与受迫振动
受迫振动的频率等于驱动力的频率。
振幅与驱动力频率有关
当驱动力频率接近物体的固有频率时 ,振幅最大,称为共振现象。
振动力学课程设计模型

振动力学课程设计模型一、课程目标知识目标:1. 学生能理解并掌握振动的定义、分类及其基本特性;2. 学生能描述单自由度系统的自由振动和受迫振动的数学表达及物理意义;3. 学生能运用振动力学原理,分析实际简单机械振动问题。
技能目标:1. 学生能够运用振动方程求解单自由度系统的振动问题;2. 学生能够设计简单的振动控制实验,并通过数据分析评价振动控制效果;3. 学生能够运用物理软件进行振动模拟,提高问题解决能力。
情感态度价值观目标:1. 学生通过学习振动力学,培养对物理科学的兴趣和探究精神;2. 学生在学习过程中,培养团队合作意识和解决问题的耐心;3. 学生通过振动实例分析,认识到振动力学在工程领域的应用,增强理论联系实际的意识。
分析:本课程为高中物理学科振动力学部分,针对高二年级学生。
学生在前期已学习基础力学和波动学,具备一定物理基础。
课程性质为理论联系实际,强调学以致用。
教学要求注重启发式教学,引导学生主动探究,培养实践能力。
课程目标旨在通过具体学习成果的达成,使学生在知识、技能和情感态度价值观方面得到全面提升。
二、教学内容1. 振动基本概念:振动定义、分类、自由度;2. 单自由度系统自由振动:简谐振动、阻尼振动,振动方程及其解析;3. 单自由度系统受迫振动:受迫振动的数学描述,共振现象及其应用;4. 振动控制:振动控制原理,简单振动控制实验设计;5. 振动实例分析:结合实际工程案例,分析振动问题及其解决方案;6. 振动模拟:运用物理软件进行振动模拟,深化理解振动规律。
教学内容安排与进度:第一课时:振动基本概念,简谐振动的数学描述;第二课时:阻尼振动与受迫振动,共振现象;第三课时:振动控制原理,实验设计与数据分析;第四课时:工程案例分析与振动模拟。
教材章节关联:《高中物理》下册第八章“机械振动与波动”:1. 第一节 振动的基本概念;2. 第二节 简谐运动;3. 第三节 阻尼振动与受迫振动;4. 第四节 振动的控制与应用。
振动力学课程设计报告

振动力学课程设计报告课设题目:单位:专业/班级:姓名:指导教师:2011年12月22日一、前言1、课题目的或意义振动力学课程设计是以培养我们综合运用所学知识解决实际问题为目的,通过实践,实现了从理论到实践再到理论的飞跃。
增强了认识问题,分析问题,解决问题的能力。
带着理论知识真正用到实践中,在实践中巩固理论并发现不足,从而更好的提高专业素养。
为认识社会,了解社会,步入社会打下了良好的基础。
通过对GZ电磁振动给料机的振动分析与减振设计,了解机械振动的原理,巩固所学振动力学基本知识,通过分析问题,建立振动模型,在通过软件计算,培养了我们独立分析问题和运用所学理论知识解决问题的能力。
2、课题背景:随着科学技术发展的日新月异,电磁振动给料机已经成为当今工程应用中空前活跃的领域,在生活中可以说是使用的广泛,因此掌握电磁振动给料机技术是很有必要的和重要的。
GZ系列电磁振动给料机广泛应用于矿山、冶金、煤炭、建材、轻工、化工、电力、机械、粮食等各行各业中,用于把块状、颗粒状及粉状物料从贮料仓或漏斗中均匀连续或定量地给到受料装置中去。
特别适用于自动配料、定量包装、给料精度要求高的场合。
例如,向带式输送机、斗式提升机,筛分设备等给料;向破碎机、粉碎机等喂料,以及用于自动配料,定量包装等,并可用于自动控制的流程中,实现生产流程的自动化。
GZ电磁振动给料机的工作原理:GZ电磁振动给料机的给料过程是利用电磁振动器驱动给料槽沿倾斜方向做直线往复运动来实现的,当给料机振动的速度垂直分量大于策略加速度时,槽中的物料将被抛起,并按照抛物线的轨迹向前进行跳跃运动,抛起和下落在1/50秒完成,料槽每振动一次槽中的物料被抛起向前跳跃一次,这样槽体以每分钟3000次的频率往复振动,物料相应地被连续抛起向前移动以达到给料目的。
GZ系列电磁振动给料机主要用途:电磁振动给料机广泛使用在冶金、煤炭、电子、机械、化工、建材、轻工、粮食等行业中,在生产流程中,用于把块状、颗粒状、粉状物料从贮料仓或漏斗中定量、均匀、连续地给到受料装置中去。
振动力学课程设计任务书
振动力学课程设计任务书一、课程设计的目的振动力学课程设计是工程力学专业集中实践环节的内容之一。
学生运用所学的基础理论和专业知识通过课程设计的实践,巩固和掌握振动力学课程的知识。
通过课程设计使学生了解结构振动研究的过程,培养学生的计算和分析能力。
二、课程设计的要求学生需认真阅读课程设计任务书,参考有关资料,在规定的时间内独立完成课程设计任务。
课程设计要求计算准确、文字通顺、图形精致。
课程设计(含任务书和计算程序等)应装订成册。
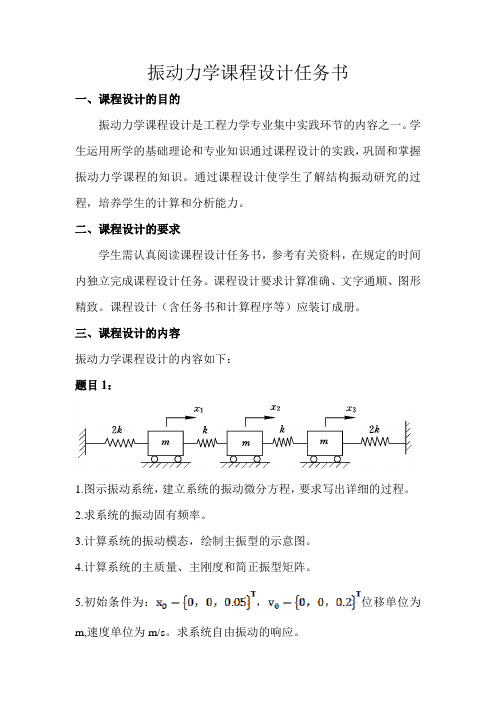
三、课程设计的内容振动力学课程设计的内容如下:题目1:1.图示振动系统,建立系统的振动微分方程,要求写出详细的过程。
2.求系统的振动固有频率。
3.计算系统的振动模态,绘制主振型的示意图。
4.计算系统的主质量、主刚度和简正振型矩阵。
5.初始条件为:,位移单位为m,速度单位为m/s。
求系统自由振动的响应。
6.在左侧第一个物体上作用简谐力,求系统强迫振动的响应。
7.在固定端和第1个物体之间安装一个阻尼系数为 c1的阻尼器,在第1个和第2个物体之间安装一个阻尼系数为 c2的阻尼器,在第2个和第3个物体之间安装一个阻尼系数为 c3的阻尼器,在第3个物体和固定端之间安装一个阻尼系数为 c4的阻尼器。
已知:c1=2c,c2=5c, c3=c,c4=3c。
建立系统的有阻尼振动微分方程,计算系统的阻尼矩阵、模态阻尼矩阵。
8.用瑞利法估算系统的基频。
9.用矩阵迭代法计算系统的固有频率。
题目2:1.图示振动系统,建立系统的振动微分方程,要求写出详细的过程。
2.求系统的振动固有频率。
3.计算系统的振动模态,绘制主振型的示意图。
4.计算系统的主质量、主刚度和简正振型矩阵。
5.初始条件为:,位移单位为m,速度单位为m/s。
求系统自由振动的响应。
6.在左侧第三个物体上作用非周期激励力,u(t)为单位阶跃函数,求系统强迫振动的响应。
7.在固定端和第1个物体之间安装一个阻尼系数为 c1的阻尼器,在第1个和第2个物体之间安装一个阻尼系数为 c2的阻尼器,在第2个和第3个物体之间安装一个阻尼系数为 c3的阻尼器,在第3个物体和固定端之间安装一个阻尼系数为 c4的阻尼器。
《振动力学》课程教学大纲 - 苏州科技学院土木工程学院
《振动力学》课程教学大纲课程编号:20311103总学时数:48(实验6)总学分数:3课程性质:专业必修课适用专业:工程力学一、课程的任务和基本要求:《振动力学》课程是工程力学专业的一门主要课程,主要研究在确定性激励下分析系统的动力响应的基本理论和基本方法。
通过本课程的学习,使学生能够初步掌握建立振动问题力学模型的方法;掌握振动力学的基本概念、基本理论和基本分析计算方法,并能初步应用振动理论研究和解决工程中的各种振动问题。
结合本课程的学习,培养学生的分析能力、计算能力和分析解决工程实际问题的初步能力。
二、基本内容和要求:(一)概论振动的定义,振动具有两重性,研究目标(目的),振动问题的研究方法,振动分析的力学模型,振动的分类,振动研究的分析工具。
(二)谐振振动与谱分析谐振振动的表示方法,谐振振动的谱分析方法,非周期振动的谱分析方法。
(三)单自由度系统的自由振动单自由度线性系统的力学模型和基本概念,单自由度无阻尼系统的自由振动,固有频率的计算,等效质量与等效弹簧刚度,有阻尼系统的自由振动。
(四)单自由度系统的强迫振动简谐激励引起的强迫振动,简谐激励引起的强迫振动瞬态响应过程,偏心质量引起的强迫振动,支撑运动引起的强迫振动,振动的隔离,惯性式测振仪的基本原理,强近振动中的能量关系,阻尼理论,任意周期激励的响应,任意激励的响应。
(五)多自由度系统的振动多自由度系统的运动微分方程,坐标耦合与主坐标,固有频率与主振型,主坐标与正则坐标,固有频率相等和固有频率为零的情况,系统对初始条件的响应,动力减振原理与减振器,有阻尼系统的响应,一般阻尼系统的响应。
(六)多自由度系统振动的近似解法邓克利法,瑞利法,里茨法。
(七)弹性体的振动一维波动方程、弦横向振动的自由振动解、等直杆纵向振动的自由振动解、等直杆纵向振动的强迫振动解、梁的横向振动、梁的横向强迫振动。
三、实践环节和要求:实习一、简谐振动振幅与频率测量;实验目的:掌握激振器(及其功率放大器)、加速度传感器的安装和使用;了解激振器、加速度传感器的工作原理;掌握简谐振动振幅简单的测量方法。
振动力学课程设计报告材料(2)
振动力学课程设计报告课设题目:电磁振动给料机的振动分析与隔振设计单位:专业/班级:姓名:指导教师:一、前言1、课题目的或意义通过对结构进行振动分析或参数设计,进一步巩固和加深振动力学课程中的基本理论知识,初步掌握实际结构中对振动问题分析、计算的步骤和方法,培养和提高独立分析问题和运用所学理论知识解决实际问题的能力。
2、课题背景:1、结构:本设计中,料槽底板采用16mm厚钢板焊接而成,再用筋板加强。
料槽衬板采用20mm厚钢板。
料槽材料全部采用镇静钢,能承受工作过程中由于振动产生的交变载荷,焊缝不易开裂。
2、工程应用前景:振动给料机用于把物料从贮料仓或其它贮料设备中均匀或定量的供给到受料设备中,是实行流水作业自动化的必备设备分敞开型和封闭型两种,本设计中电磁振动给料为双质体系统,结构简单,操作方便,不需润化,耗电量小;可以均匀地调节给料量为了减小惯性力,在保证强度和刚度的前提下,应尽可能减轻振动槽体的质量。
从而使其在实际工程应用中会有非常广泛的前景。
二、振动(力学)模型建立1、结构(系统)模型简介123123k k k c c c 、为隔振弹簧,为主振弹簧,、、分别为隔振和主振弹簧的阻尼4k 、4c 分别为尼龙连接板得等效刚度和阻尼。
0m 为偏心块质量,1m 为给料槽体质量,2m 激振器的振动质量。
R m —输送槽体(包括激振器)的质量,1500kg ;即012R m m m m ++=G m —槽内物料的结合质量。
在实际中系统为离散的,而建立模型后将质量进行集中从而该系统可视为为连续系统,通过上网搜索资料以及书中知识总结并设计出如上所示电磁振动给料机力学模型,其组成为料槽、电磁激振器、减振器、电源控制箱等组成。
2、系统模型参数(包括系统所必需的几何、质量、等效刚、激励等)根据实际应用情况假设个几何参数为:外形尺寸(长x 宽x 高):4057 x 2100 x 1730mm1l =390mm 2l =1140mm 3l =650mm质量参数:150018753375R G m m m kg =+=+=0587m Kg = 1456m Kg = 2457m Kg =等效刚度:由公式得24055(1)()79e k K N c k μλγλ=-∆++1k =875641N/m 2k =854213N/m 3k =2126284N/m 4k =458256 N/m激振力矩阵:三、振动分析1、振动方程建立由于系统做微抛物运动,因此系统有两个自由度,所以其振动微分方程如下:MX CX KX F++=其中; 。
振动力学教学设计 (2)
振动力学教学设计
引言
振动力学是一门物理学科,研究物体在周期性外界作用下的运动规律和特性。
振动力学具有广泛的应用范围,包括机械工程、电子工程、航空航天等领域。
因此,在物理学教学中,振动力学是重要的一部分。
教学设计是教学活动的核心内容,对于振动力学教学来说,教学设计的合理性
与质量会对学生的学习效果产生重要影响。
本文将就如何设计振动力学教学进行探讨和总结。
背景
1.学生背景
本次教学的受众对象为大学本科三年级的物理专业学生。
学生曾经学习过大学
物理学的基础理论,包括运动学、动力学等内容。
2.教学目标
•掌握振动力学的基本概念和基本理论;
•能够分析振动运动的特性以及系统的稳定性;
•掌握基本的振动实验技能。
教学内容
第一部分:基本概念和基本理论
1.什么是振动?
2.振动的基本特性有哪些?
3.振动的产生和传播机制是什么?
4.如何描述振动运动?
1。
振动力学课程设计报告--垂直振动输送机的机械振动与隔振分析
振动力学课程设计报告课设题目:垂直振动输送机的机械振动与隔振分析单位:理学院专业/班级:工程力学09-1姓名:指导教师:2011-12-18一、前言1、课题目的或意义主要研究双质体垂直振动输送机输送原理及设计理论,根据参数对其进行运动分析和隔振分析。
通过对结构进行振动分析或参数设计,进一步巩固和加深振动力学课程中的基础理论知识,初步掌握实际结构中对振动问题分析、计算的步骤和方法,培养和提高独立分析问题和运用所学理论知识解决实际问题的能力。
2、课题背景:垂直振动输送机主要应用于箱式元件的提升输送,按照进料口出料口的方向分为Z型垂直提升机和C型垂直提升机两种提升输送机。
垂直振动提升机主要应用于矿山、冶金、化工、轻工、建材、机械、粮食等各行业垂直输送50毫米以下的粉状、颗粒状、块状物料,在连续供料条件下也可用于输送具有滚动性的团状物料,可以代斗式提升机、倾斜使用皮带输送机等。
惯性自同步垂直振动提升机由于应用了机械振动学的自同步原理具有结构简单,技术参数先进,安装调整方便,维修量小,占地面积小及对基础无特殊要求等特点,而且设备费用和运送费用较低。
在有特殊要求时可同时完成冷却、干燥等多种工艺过程,是一种理想的物料垂直提升设备。
ZC系列垂直振动输送机的工作原理:ZC系列垂直振动输送机的驱动装置振动安装在输送塔下部,两台振动电机堆成交叉安装,输送塔由管体和焊接在管体周围的螺旋输送槽组成,输送塔座于减振装置上,减振装置有底座和隔振弹簧组成。
当垂直输送机工作时,根据双振电机自同步原理,由振动电机产生激振力,强迫整个输送塔体作水平圆运动和向上垂直运动的空间复合振动,螺旋槽内的物料则受输送槽的作用,做匀速抛掷圆运动,沿输送槽体向上运动,从而完成物料的向上(或向下)输送作业。
二、振动(力学)模型建立1、结构(系统)模型简介此系统为双质体垂直振动输送机,为离散体。
此结构由螺旋槽体、底座、隔振弹簧、激振电动机和底架组成,底架固结于地面上,两台振动电机堆成交叉安装,输送塔由管体和焊接在管体周围的螺旋输送槽组成,输送塔座于减振装置上,减振装置有底座和隔振弹簧组成。
振动力学第三版课程设计
振动力学第三版课程设计一、前言振动力学是一门重要的工程学科,是研究振动现象、振动特性和振动控制等方面的学科。
本次课程设计旨在通过理论分析和计算实例,深入理解振动力学的基本理论和应用,全面提高学生的振动力学知识。
二、课程设计目的1.了解振动力学的基本概念及其基本理论;2.掌握振动系统的自由振动和强制振动的计算方法;3.熟悉振动系统的动力响应分析方法;4.掌握振动系统的非线性振动特性;5.掌握振动控制的基本方法;6.具备一定的综合应用能力。
三、课程设计内容1. 振动系统的自由振动和强制振动•振动系统的基本元件与模型•振动系统的自由振动•单自由度体系的阻尼简谐振动•单自由度体系的非阻尼简谐振动•振动系统的强制振动•简谐强迫振动的响应分析方法•非简谐强迫振动的响应分析方法2. 振动系统的动力响应分析方法•随机振动分析方法•有限元方法•能量法•非线性动力学分析方法3. 振动系统的非线性振动特性•不同非线性系统的基本行为•非线性振动分析方法•非线性动力学控制4. 振动控制的基本方法•振动控制的基本原理•主动控制与被动控制•最优控制与稳定性分析四、课程设计要求1.在掌握基本理论的前提下,学生需要独立完成两个以上的计算分析实例;2.要求对实例的分析过程进行详细记录,并说明所采取的计算方法和理论分析方法;3.提交实验报告,每个实例的报告应包括实验目的、实验原理、实验步骤、实验结果分析和结论等部分;4.要求各组学生相互合作,共同讨论、探讨,不得抄袭或抄袭他人的报告。
五、课程设计参考资料1.高清愿、骆仲毅. 振动力学[M]. 机械工业出版社, 2014.2.邬建国、冯海燕. 振动力学[M]. 电子工业出版社, 2015.3.石晓宝. 振动理论与应用[M]. 东南大学出版社, 2013.4.张强. 振动控制技术[M]. 科学出版社, 2015.本次课程设计的参考资料仅供学生扩展和延伸知识使用,学生应在课程设计过程中根据实际需要选择参考资料。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
振动力学课程设计x1 x2 x3年级:工程力学09级02班姓名:***学号:***********振动力学课程设计(大作业)的内容如下:1.在图示振动系统中,k k k k k k k k m m m m m m 3,,4,5,7,4,34321321=======建立系统的振动微分方程,要求写出详细的过程。
2.求系统的振动固有频率。
3.计算系统的振动模态,绘制主振型的示意图。
4.计算系统的主质量、主刚度和简正振型矩阵。
5.初始条件为:T 0T 0} 0.5 0, 0, { ,} 0.03 0, 0, {==x x ,位移单位为m,速度单位为m/s 。
求系统自由振动的响应。
6.在质量为m 1的物体上作用简谐力 sin )(t F t f ω=,求系统强迫振动的响应。
7.在质量为m 3的物体上作用非周期激励力 )()(t Fu t f =, )(t u 为单位阶跃函数,求系统强迫振动的响应。
8.在固定端和第1个物体之间安装一个阻尼系数为 1c 的阻尼器,在第1个和第2个物体之间安装一个阻尼系数为 2c 的阻尼器,在第2个和第3个物体之间安装一个阻尼系数为 c 3的阻尼器,在第3个物体和固定端之间安装一个阻尼系数为 c 4的阻尼器。
已知:c c c c c c c c 3 , 6 , ,2 4321====。
建立系统的有阻尼振动微分方程,计算系统的阻尼矩阵、模态阻尼矩阵。
9.用瑞利法估算系统的基频。
10.用传递矩阵法计算系统的固有频率。
解答过程如下:1.分别以两物体的平衡位置为坐标原点,取 x1 、x2和x3 为广义坐标,由牛顿第二定律得⎪⎩⎪⎨⎧---=---=--=3423333122233221112211)()()()(x k x x k xm x x k x x k x m x k x x k x m自由振动微分方程为⎪⎩⎪⎨⎧=++-=-++-=-++0)(0)(0)(34323333323212222212111x k k x k xm x k x k k x k x m x k x k k x m写成矩阵形式为⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--+--++⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡00000000003214333322221321321x x x k k k k k k k k k k x x xm m m上式即为系统的振动微分方程。
2. 令3k3m4m7mk5kx1 x2 x34k⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=m m m 700040003M ⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=321x x x x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=k kk k kkk4054049K ⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=321x x x x则振动微分方程可以写作0Kx x M =+令 0M K =-2ω即07404540439222=-------ωωωm k kk m k k k m k展开得系统的本征方程0107404405842422633=-+-ωωωk mk m k m用MATLAB 求解该方程得m k m k m k8911.18945.06672.0321===ωωω3.广义本征值方程为0φM K =-)(2)(i i ω )3,2,1(=i,解得,令)(16672.0131==φωm kT118839.04613.0)()(=φ,解得,令)(18945.0232==φωm kT216009.1-9703.0-)()(=φ,解得,令)(18911.1333==φωm kT310338.21-6668.48)()(=φ模态矩阵为⎪⎪⎪⎭⎫⎝⎛=11121.0338-1.6009-0.883948.66689703.0-4613.0φ主振型示意图如下图所示4.用MATLAB 求主质量和主刚度)1()1(1M φφT p M =[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=18839.04613.070004000318839.04613.0m m m m 7635.10=)1()1(1K φφT p K =0.4613 0.88391-0.9703-1.6009148.6668-21.03381[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=18839.04613.0405404918839.04613.0k kk k kk kk 7918.4=m M T p 0760.20)2()2(2==M φφk K T p 0627.16)2()2(2==K φφ m M T p 1.8882)3()3(3==M φφkK T p 31763)3()3(3==K φφ,的各元素除以令)(pi i M φmm m NN N 10106.02232.05164.0,12232.03573.02166.0,13048.02694.01406.0321⎪⎪⎪⎭⎫⎝⎛-=⎪⎪⎪⎭⎫ ⎝⎛--=⎪⎪⎪⎭⎫ ⎝⎛=φφφ ()m N NNN 10106.02232.03048.02232.03573.02694.05164.02166.01406.0321⎪⎪⎪⎭⎫⎝⎛---==φφφφ上式即为简正振型矩阵。
5.用MATLAB 求得模态矩阵的逆矩阵为⎪⎪⎪⎭⎫ ⎝⎛---=-0008.00095.00164.03488.03189.01450.06504.03284.01286.01φ主质量和主刚度为⎪⎪⎪⎭⎫ ⎝⎛==1.88820000760.200007635.10M φφM T p ⎪⎪⎪⎭⎫ ⎝⎛==317630000627.160007918.4K φφK Tp主坐标为⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+-+--++==-3213213210008.00095.00164.03488.03189.01450.06504.03284.01286.0x x x x x x x x x p x φx 1得到用主坐标表示的动力学方程⎪⎪⎪⎩⎪⎪⎪⎨⎧=+=+=+05761.308001.004452.0321x m k x x m k x x mk x pp p将原坐标的初始条件化为主坐标的初始条件⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧==⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧==--0004.01744.03252.0)0(,0000.00105.00195.0)0(0101x φxx φx p p则主坐标表示的系统自由振动规律为1111sin 3252.0cos 0195.0ωωωtt x p += 2222sin 1744.0cos 0105.0ωωωtt x p +=333sin 0004.0ωωtx p =转换为实际坐标表示的系统自由振动规律为32116668.489703.04613.0p p p x x x x +-= 32120338.216009.18839.0p p p x x x x --=3213p p p x x x x ++=6.系统的动力学方程为t ωsin F Kx x M =+其中 ()TF00=F令TX X t )(,sin 21==X X x ω代入上述方程后得到F M )X (K =-2ω 计算与主坐标对应的激励力幅值,得到()TF FF6668.489703.04613.0-==F φF T p列出解耦的主坐标受迫振动方程 tB x x j j pj j pj ωωωsin 22=+ )3,2,1(=j其中,0963.0111k F k F B p p ==,0604.0222k F k F B p p -==kFk F B p p 0015.0333==解出t s B x j j pj ωsin 12⎪⎪⎭⎫⎝⎛-=其中j j s ωω= )3,2,1(=j 转换为原坐标的受迫振动规律⎪⎭⎪⎬⎫++=--=+-=3213321232110338.216009.18839.06668.489703.04613.0p p p p p p p p p x x x x x x x x x x x x7.作用于系统上的激励力为()Tt Fu t )(00)(=F变换为主坐标的激励力为()Tt Fu t Fu t Fu t t )()()()()(==F φF T p列出主坐标动力学方程)(t p p p p p F x K xM =+写出各主坐标的响应函数tM t h j jpj pj ωωsin 1)(=)3,2,1(=j⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=313212111sin 000sin 000sin )(ωωωωωωp p p p M t M t M tt h脉冲响应矩阵为Tp )φ(φh h t t =)(⎪⎪⎪⎭⎫ ⎝⎛++--+---++-++--+++=c b a c b a c b a c b a c b a c b a c b a c b a c b a 0338.216009.18839.06668.489703.04613.00338.216009.18839.04.4425629.27813.06.10235534.14077.06668.489703.04613.06.10235534.14077.05.23689415.02128.0其中⎪⎪⎭⎫⎝⎛===333222111sin ,sin ,sin ωωωωωωp P p M t c M t b M t a τττd t F h t x t)()()(0-=⎰ττd t Fu c b a c b a c b a t)(0338.216009.18839.06668.489703.04613.00-⎪⎪⎪⎭⎫ ⎝⎛++--+-=⎰.1,0;0,=<<=>u t u t 时时而τττωτωωτωωτωFd M M M t x tp p p ⎰⎪⎪⎭⎫ ⎝⎛+-=∴03332221111sin 6668.48sin 9703.0sin 4613.0)( ()()()[]t t t k F321cos 10015.0cos 10604.0cos 10963.0ωωω-+---=同理可求得()()()[]t t t k Ft x 3212cos 10007.0cos 10997.0cos 11845.0)(ωωω-----=()()[]t t k Ft x 213cos 10623.0cos 12087.0)(ωω-+-= 8.分别以两物体的平衡位置为坐标原点,取 x1 、x2和x3 为广义坐标,由牛顿第二定律得)()(122111221111x x c x c x x k x k x m-+--+-= )()()()(23312223312222x x c x x c x x k x x k xm -+---+--= 342333423333)()(x c x x c x k x x k x m ------=则自由振动微分方程为⎪⎩⎪⎨⎧=++-++-=-++--++-=-++-++0)()(0)()(0)()(3432334323333323212332321222221212212111x k k x k x c c x c xm x k x k k x k x c x c c x c x m x k x k k x c x c c x m写成矩阵形式为40540499606703700040003321321321=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎪⎭⎫⎝⎛----+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎪⎭⎫ ⎝⎛----+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎪⎭⎫ ⎝⎛x x x k kk k k kk x xx c c c c c c c x x x m m m上式即为有阻尼振动微分方程。