十字轴万向节式蛇形机器人机构设计
轻型蛇形机器人系统设计及分段运动规划策略

2023-11-07CATALOGUE目录•引言•轻型蛇形机器人系统设计•分段运动规划策略•实验与分析•结论与展望•参考文献01引言背景随着科技的发展,机器人技术在军事、救援、工业等领域的应用越来越广泛,而蛇形机器人作为机器人技术的前沿领域,具有很大的研究价值和发展潜力。
意义轻型蛇形机器人作为一种灵活、适应性强、可实现复杂运动的机器人,在复杂环境下的应用具有不可替代的作用,对于推动机器人技术的发展具有重要的意义。
研究背景与意义现状目前,国内外对于蛇形机器人的研究已经取得了一定的成果,一些蛇形机器人已经实现了自主运动和复杂环境的适应,但还存在一些问题,如机器人的运动速度和稳定性不足,运动规划和控制方法不够完善等。
发展未来的蛇形机器人将向着更轻便、更灵活、更智能的方向发展,同时,随着人工智能和机器学习技术的发展,蛇形机器人的智能化程度也将得到进一步提高。
研究现状与发展•目的:本课题旨在设计一种轻型蛇形机器人系统,实现机器人在复杂环境下的灵活运动和适应,同时研究分段运动规划策略,提高机器人的运动速度和稳定性,为进一步推动蛇形机器人的应用和发展提供技术支持。
研究目的与任务研究目的与任务任务1. 设计轻型蛇形机器人系统,包括机械结构、控制系统、感知系统等部分;2. 研究分段运动规划策略,根据环境变化和任务需求,实现机器人的自适应运动规划;研究目的与任务3. 实现机器人的自主运动和环境适应,包括地形跟随、障碍物避让等功能;4. 通过实验验证机器人的性能和分段运动规划策略的有效性。
02轻型蛇形机器人系统设计机器人系统概述机器人系统组成轻型蛇形机器人系统由机械结构、控制系统、传感器系统和分段运动规划策略等组成。
机器人工作原理通过控制系统驱动机械结构实现弯曲和伸展,传感器系统实时监测机器人姿态和位置,分段运动规划策略控制机器人实现复杂环境下的运动。
采用高弹性、轻质、耐腐蚀的柔性材料制作蛇形机器人的身体,实现灵活的弯曲和伸展。
蛇形机器人的机构设计及运动分析

机
电
工
程
Vol. 29 No.5 May 2012
蛇形机器人的机构设计及运动分析
(中国船舶重工集团公司 第七一三研究所,河南 郑州 450015)
摘要:蛇形机器人以其独特的身体结构和运动形式能够适应各种复杂环境。为了验证蛇形机器人的运动能力, 设计了一种前进中 可做周期性运动的蛇形机器人, 重点讨论了其关节机构的设计和运动原理; 通过建立蛇形机器人运动的数学模型, 并结合其运动的 周期性, 详细分析了三连杆模型的运动步态特性。研究结果表明, 三连杆运动步态提高了蛇形机器人的运动能力。 关键词:蛇形机器人; 周期性运动; 关节设计; 三连杆; 运动步态 中图分类号:TH122; TH112; TP242 文献标志码: A 文章编号: 1001-4551 (2012) 05-0512-04
不同的运动方式, 本研究设计的模块单元的连接方式 如图 3 所示, 是主动驱动的连接方式, 电机固定在电机
· 514 ·
机
电
工
程
第 29 卷
蛇形机器人三连杆组合的运动步态和多连杆组合的运 动步态 2.1
[6-12]
2.2
。
把机器人简化为 6 段固定长度的连杆系统。假设蛇形 角度范围是±60°。由蛇尾向蛇头方向运动, 三连杆的 程, 运动波的传递过程如图 4 所示。
ZHANG Ling-ling, QU Ze-chao
பைடு நூலகம்
0
引
言
本研究所述的蛇形机器人。该蛇形机器人可以在复杂 环境中起伏前进, 并能够实现侧移、 翻转、 平面蜿蜒等 多种运动形式。通过对蛇形机器人模型的运动分析, 笔者研究出了一种蛇形机器人的运动方式, 并在其实 体上得到了有效的验证。
一种新型的攀爬蛇形机器人

第20 卷 第1期 苏州市职业大学学报 V ol.20,No.1 2009年3月 Journal of Suzhou V ocational University Mar. , 2009一种新型的攀爬蛇形机器人孙 洪(苏州市职业大学 电子信息工程系,江苏 苏州 215104)摘 要:针对蛇形机器人最常采用的三种关节连接方式:平行连接、正交连接和万向节连接,通过典型实例进行了工作空间的分析和比较,提出了一种具有万向节功能的P -R(pitch -roll)模块.该模块结构简单、便于控制,所组成的蛇形机器人理论上可以实现各种三维攀爬动作.最后通过研制的新型攀爬蛇形机器人样机,验证了P -R模块的可实现和灵活性.关键词:蛇形机器人;平行连接;正交连接;万向节连接;P -R模块;工作空间中图分类号:TP242 文献标志码:A 文章编号:1008-5475(2009)01-0027-05A New Style Climbing Snakelike RobotSUN Hong(Department of Electronic Information Engineering, Suzhou Vocational University, Suzhou 215104, China)Abstract: Three most dominant joints' links, namely parallel link, orthogonal link and universal jointlink, of snakelike robot were presented by typical models. Based on examples, their operating spaceswere analyzed and compared. Then a new functional module for joints' combination, named Pitch -Roll, was presented. This module has the function of universal joint, but is simpler to implementand easier to control. A snakelike robot based on this link module can theoretically perform all typesof maneuvers in 3D spaces. Finally, the prototype of a new type snakelike robot based on the P -Rmodule was produced, which further verified the agility of P -R module.Key words: snakelike robot; parallel link; orthogonal link; universal joint link; P -R module;operating space收稿日期:2008-11-26;修回日期:2009-01-16作者简介:孙 洪(1972-),女,山东济南人,讲师,博士,主要从事工业机器人和仿生机器人研究.蛇形机器人是仿生机器人研究中很活跃的一支,从1972年日本东京大学的Hirose 教授研制出第一台样机至今,相继有数十台蛇形机器人样机问世.这些样机能实现在平面上蜿蜒爬行、侧滑、翻滚等二维运动,在爬行中抬头或爬台阶、翻越较低障碍等三维运动,而对于更为复杂的如爬树等三维运动则甚为少见.本文将通过典型实例对几种样机的连接方式进行分析比较,提出一种新的连接方式,并基于该连接方式研制蛇形机器人样机,以期能够开发出结构简单、便于控制、具有多种运动模式的、能爬树的攀爬型蛇形机器人,它可实现空中侦察、管外壁检测、电杆高空线路维修等功能,其应用前景十分广阔.1 常见蛇形机器人关节连接方式蛇形机器人是一种无固定基座、多关节、多自由度的链式柔性机器人,它由多个相同或相似的单元模块连接组成,其运动模式和工作空间决定于各单元模块间的连接方式.综合考察各种样机,蛇形机器!!!!!!!!!!!!!!!DŽc* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!DŽd*ZYXZYXZYXZYXP RHEF I4 结 论本文采用P-R 模块所研制成功的一种新型的具有攀爬功能的蛇形机器人,能实现灵活的三维运动.当前大部分采用平行连接或正交连接的蛇形机器人甚至一端固定的柔性机器人或机械臂,均可通过简单的改造,变成P-R 模块连接方式,从而大大提升其灵活性和工作空间.参考文献:[1] ENDO G, TOGAWA K, HIROSE S. Study on self -contained and terrain adaptive active cord mechanism[J]. IEEEInternational Conference on Intelligent Robots and Systems, 1999, 3: 1399-1405.[2] 周旭升,潘献飞,谭红力,等. 一种蛇形机器人的研制[J].机器人,2002,24(7):684-687.[3] 黄 恒,颜国正,丁国清,等. 一类蛇形机器人系统的运动学分析[J].高技术通讯,2002,6(3):90-94.[4] MAKOTO M, SHIGEO H. Three -dimensional serpentine motion and lateral rolling by active cord mechanism ACM -R3 [J].Proceedings of the 2002 IEEE/RSJ Intl, 2002, 1: 829-834.[5] BERNHARD K, KARL L P. GMD -Snake2: a snake -like robot driven by wheels and a method for motion control [J].Proc. of the Internet Content Rating Association, 1999: 3014-3019.[6] AOKI T, OHNO H, HIROSE S. Study on pneumatic mobile robot: design of SSR -II using bridle bellows mechanism [J].Proceedings of the 41st SICE Annual Conference , 2002, 3(5/7): 1492-1496.[7] NILSSON M. Why snake robots need torsion -free joints and how to design them [J]. Proceedings of the 1998 IEEEInternational Conference on Robotics and Automation, 1998, 1: 412-417.(责任编辑:尚 丽))b* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!)c* !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!)d*偠㒧2009年第1期 孙 洪:一种新型的攀爬蛇形机器人。
一种新型蛇形机器人的机构研究与设计
一种新型蛇形机器人的机构研究与设计摘要:蛇形机器人是一种新型的机器人,它的机构结构具有良好的灵活性和适应性,可以用于各种环境下的探测、搜救、拍摄等任务。
本文通过分析蛇形机器人的机构结构、运动原理以及控制方法,对其进行详细研究和设计,并进行了仿真验证和实验验证。
结果表明,所设计的蛇形机器人机构具有较高的运动精度和稳定性,可以在各种复杂环境下有效地完成任务。
关键词:蛇形机器人、机构结构、运动原理、控制方法、仿真验证、实验验证1.引言蛇形机器人是一种仿生机器人,它的外形和运动特点都来源于蛇类动物。
蛇形机器人的机构结构类似于蛇体,可以实现蛇般的爬行、盘踞、攀爬等运动,具有很强的适应性和灵活性,可以用于各种环境下的探测、搜救、拍摄等任务。
蛇形机器人的机构设计是实现其运动特点的基础,因此本文分别从机构结构、运动原理、控制方法等方面进行研究和设计。
2.蛇形机器人的机构结构蛇形机器人的机构结构是其实现运动的基础,一般由三部分组成:蛇头、蛇身和蛇尾。
其中蛇头负责控制运动方向,蛇身由多个连续的节段组成,每个节段可以自由弯曲,蛇尾负责平衡和保持身体稳定。
蛇形机器人的机构结构主要涉及两个方面,一个是机构设计,另一个是材料选择。
机构设计包括蛇体的长度、直径、关节间距、关节的自由度、驱动方式等;材料选择主要包括各种材料的力学性能、刚度、强度、重量等特性。
在机构设计中,要注意蛇体的灵活性和韧性,以保证其在复杂环境中的适应性和稳定性;在材料选择中,则要根据实际应用的需要进行选择,比如在高温、腐蚀等极端环境中要选择具有耐高温、耐腐蚀性能的材料。
3.蛇形机器人的运动原理蛇形机器人运动的机理来源于蛇类动物的生物学特性,主要包括以下几个方面。
(1)鳞片滑跳:蛇类动物的身体表面被覆盖着很多光滑的鳞片,在运动时可以充当滑行的媒介。
这种滑行方式可以使蛇形机器人在各种环境下灵活运动,如在水中游动、在陡峭的斜面上攀爬等。
(2)节段结构:蛇类动物的身体由多个节段构成,每个节段可以自由弯曲,因此蛇形机器人可以实现蛇般的摆动和弯曲。
一种基于空间连杆机构的蛇形机器人
+ < co s a rcco s + < sin a rcco s +<
a a +c a a +c
2 2 2 2
+π +θ +π +θ ( 1)
2 2 2 a + b + c co s a rc tan
2 2 2 a + b + c sin a rc tan
和
xQ = yQ = zQ =
2 2 2 a + b + c co s a rc tan
心 , 从 O 点 到 PO 和 QO 的 几 何 尺 寸 为 O E = a =
221 5 mm , EF = b = 271 0 mm , FP0 = FQ 0 = c = 451 0 mm ,
O P0 = OQ 0 = a + b + c = 561 8 mm; 令 U 和 V 表示
2 2 2
个蛇身的运动 . 本文下面展示的样机有 9 个骨节 , 由
16 个微型伺服电机驱动 . 关节空间机构的三维实体
模型如图 1 所示 , 以骨节间水平和垂直最大转角为 优化目标 , 以整体外形尺寸和电机外形尺寸为约束 条件 ,通过实体运动仿真对该空间机构关节参数 (骨 节长 、 宽、 高、 曲柄长和连杆长 ) 寻优得到的主要参数 见表 1. 为了调整蛇形机器人纵横向运动的摩擦系 数 ,每个骨节下面安装有两个被动轮 .
Fig . 3 Geometric parameters of joint spatial mechanis m
xP = yP = zP =
2 2 2 a + b + c co s a rc tan
蛇型机器人控制系统设计与单片机控制
第24卷第5期苏 州 大 学 学 报(工 科 版)Vol.24No.5 2004年10月JOURNALOFSOOCHOWUNIVERSITY(ENGINEERINGSCIENCEEDITION)Oct.2004文章编号:1000-1999(2004)05-0088-03蛇型机器人控制系统设计与单片机控制Ξ胡继康,芮延年,张茂青(苏州大学机电工程学院,江苏苏州215021)摘 要:介绍了一种蛇型机器人的结构原理与无线遥控的实现方法,该机器人运动控制算法简单实用,对控制器要求不高,成本也较低。
其运动控制达到设计要求,能够良好地模拟蛇的直线运动,并能以设定的速度完成预先编排的抬头、摆尾等动作,为进一步模拟蛇的复杂动作与实际应用打下了良好的基础。
关键词:蛇型机器人;无线遥控;单片机控制中图分类号:TP242 文献标识码:A0 引言蛇型机器人是近年来兴起的仿生机器人的一个新的分支。
它区别于传统的利用轮、腿或履带移动的机器人,它模仿蛇的动作,通过“身体”的扭动和伸缩实现所谓的“无肢运动”。
这种运动方式的机器人具备稳定性好,横截面小,高柔性等特点。
这些特点使得蛇型机器人适合在一些特殊环境下代替人进行作业,不仅使人更安全,也使探测、救援或维护更有效。
随着人们对蛇型机器人的认识,各个国家都开始重视蛇形机器人的研制和开发,近年来,国内也开展了对蛇型机器人的研究工作。
蛇的爬行一般可分为4种方式:1)蜿蜒运动。
蛇体摆动近似于正弦波的规律,借助侧面接触凸凹不平的地面和障碍物所产生的反作用力前进。
2)直线运动。
蛇体靠腹部和地面的摩擦力移动。
当腹部与地面固定时提供牵引力,连接肋骨和弹性皮肤的肌肉提供推动力,皮肤相对骨骼移动,反复实现运动。
在捕食和无障碍的时候运用,所经过的位移最短。
3)侧向运动。
它是借助腹部和地面的摩擦力移动。
蛇体从头部开始,身体部分顺次接地、抬起,借助腹部与地面之间的摩擦力完成侧向运动,适用于沙地或地面较平整的情况。
关于蛇形机器人结构、运动及控制的研究
上海交通大学硕士学位论文
briefly set forth the motion plan based on sensors and mobile robot navigation. The major research topics are as follows: 1.Study on the structure design of the snake- like robot We designed a module frame structure robot, which realized Chenli’s robot module design thinking and Professor Hirose’s imagine in ACM model. Because of the frame structure, the snake-like robot has much lighter body and can protect internal key components. Further more, the module design realize an easy connection and have more flexible, thus improve the maintenance. 2.The motion D-H analysis We simplified the natural snake and put forward an joint linker model, thus extract representive motion style. Regard the snake-like robot as a multiple-freedom degree linker system. Thus deduce the position and status matrix, finally the velocity and static force. 3.Gait plan of the snake-like robot This part discusses the line gait and raise head gait, later briefly introduce the twist gait. simple motion. In study on line gait, we anylsis the theory of moving of triple waving. Based on plan joint theory, we focus on the kinamatics and make a model for simulation and through this simulation we put forward a better function for motor control and an equation for general comparation angel.Then we make a conclusion that the best evalation function is suitable for our model.Finally we anylis the position regulation when
蛇形机器人整体设计与实现

蛇形机器人整体设计与实现王鹏举;刘燕;栾佳玉;王佳磊;王江南【摘要】文章主要描述蛇形机器人的设计,包括蛇形机器人的当前发展情况,蛇形机器人整体的设计与实现.实现设计时选用一种集电机、伺服驱动、总线式通讯接口为一体的SR518舵机,采用ARM嵌入式单片机stm32作为控制器,使用多种传感器增加蛇形机器人功能.【期刊名称】《智能计算机与应用》【年(卷),期】2017(007)001【总页数】5页(P121-124,127)【关键词】蛇形机器人;机械设计;舵机;stm32单片机【作者】王鹏举;刘燕;栾佳玉;王佳磊;王江南【作者单位】大连民族大学信息与通信工程学院,辽宁大连116600;大连民族大学信息与通信工程学院,辽宁大连116600;大连民族大学信息与通信工程学院,辽宁大连116600;大连民族大学信息与通信工程学院,辽宁大连116600;大连民族大学信息与通信工程学院,辽宁大连116600【正文语种】中文【中图分类】TP242随着科技的不断发展,近年来一定品类的仿生机器人正陆续推出,并进入控制使用。
而蛇形机器人则因其表现出的和蛇相似的特点,诸如具备多步态运动能力,以及对复杂多变环境的良好的适应性,已然成为机器人领域的一个标志性的方向研究热点。
人类对于生物蛇的研究,最早起源于1946年,人们以自然界的生物蛇运动方式为基础,将机器蛇的运动步态分为4种,分别为:蜿蜒运动、直线运动、鼓风琴运动和侧移运动。
在此基础上,蛇形机器人无足、无轮的特点,同时兼具机器蛇身体细长、横截面小的设计效果,因而能够深入一般轮式或步行机器人难以到达的地方,而且还可应用于人类不宜工作的某些领域。
特别是在危险和关键的灾难救援现场,蛇形机器人即可借助强大的环境适应性而有效发挥帮助搜救被困者的正面积极作用。
因此对机器蛇展开深入探讨研究则将具有必要且重要的现实意义及价值。
1.1 蛇形机器人的总体结构设计在蛇形机器人的设计上,需要首先搜取其所采用的舵机和控制系统,再将SolidWorks三维仿真软件选取设定为建模平台,测量舵机尺寸,绘制得到舵机及其零部件,而后则进行组合仿真,通过建立多种模型并提供实效比较,确定最后结构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验室研究与探索
RESEARCH AND EXPLORATION IN LABORATORY
Vol. 32 No. 5 May 2013
十字轴万向节式蛇形机器人机构设计
毛湘宇, 李青松, 施明銮
( 电子科技大学 机械电子工程学院,四川 成都 611731)
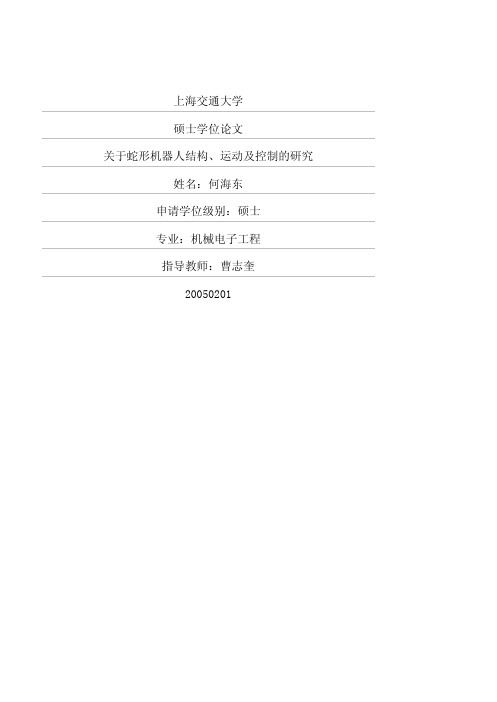
图 4 十字轴万向节式蛇形机器人实物图
2 十字轴万向节式机械结构
2. 1 机构设计思路 图 1 为实际应用中的十字轴万向节及其联接形
式。中间连接杆构件起调节 2 个万向节间距离的作 用,假设去掉连接杆而将两套万向节直接相连,得到图 2 所示结构。
图 5 单节整体效果图
图 1 十字轴万向节
图 2 无连杆万向节
Abstract: According to the requirement of experimental teaching,a highly redundant DOF snake-like robot is designed. When studying the degrees of freedom calculation of the highly redundant DOF snake robot,it was discovered that the degrees of freedom of the snake-like robot was equal to the total number of the steering gear with the load on all the steering gears. For the multiple movement of the highly redundant DOF robot,a new type of joint connection,cross shaft universal joint connection,was proposed,which is evolved from the cross shaft universal joint often used in the mechanical structure. This joint connection can enable each body segment to have two degrees of freedom,and the two power output shaft can be completely orthogonal,so that the movement of the snake-like robot is more flexible and more convenient for motion control. For the simple structure of the highly redundant DOF robot,it is more suitable for robot experimental teaching. Key words: snake-like robot; degrees of freedom; cross shaft universal joint
图 7 主固定座示意图( mm)
Байду номын сангаас
器人难以到达的地方。
在目前的研究中,蛇形机器人两个体节之间的连
接方式主要有平行连接、正交连接、球形万向节连接以 及 P-R 万向节连接。如蛇形机器人 ACMⅢ[1-4],微小 型仿蛇形机器人样机[5],ACM-R3 机器[6]等都是采用 平行联接方式; GMD-Snake2[7],SSR-Ⅱ等都采用了球 形万向节 联 接 方 式。 孙 洪 等[8] 提 出 了 具 有 万 向 节 功 能的 P-R 模块。除此之外,Chrikjian 等[9-10]提出变几
将两套万向节连接处进一步缩短,并将连接轴处 的连接件放大,可变形为十字轴万向节变形( 见图 3) 。 动力输出轴如果直接正交放置,将导致蛇体直径过大, 所以使用图中齿轮来传递平行轴间的转动,将并不正 交的轴线转化为正交轴线。
通过上述转化步骤,实现了十字轴万向节式蛇形 机器人的设计。这种万向节机构的优点在于 2 个动力 输出轴即为蛇形机器人运动所必须的 2 个正交轴,这 样正交轴在同一个平面内,完全正交,每个体节均具有
正交面 1、2、3 相互垂直,两两相交得到正交轴线 K 轴和舵机 2 输出轴,即为每个体节的正交轴,以后各 种轴线和安装面均由正交面和正交轴确定。 2. 3. 3 舵机主固定座设计
根据舵机安装孔尺寸( 图 6( a) ) 可以很容易地设 计主固定座尺寸,具体设计如图 7 所示。
一体节运动,需要在动力输出轴直线上添加一个起支 撑作用的虚轴才能有效地带动相连体节运动,所以 2 个虚轴应分别于 K 轴、舵机 2 动力轴共线。
1 蛇形机器人自由度分析
蛇形机器人属于高冗余自由度机构,这是它可以
实现多种运动的硬件条件。蛇形机器人属于空间机
构,其自由度应按空间自由度来计算。空间自由度的 计算公式[15]为
g
M = 6n - ∑( 6 - fi)
( 1)
i =1
式中: M 为自由度; g 为运动副数; n 为机构中活动构
件数; fi 为第 i 个运动副的自由度数。在蛇形机器人 系统中,所有运动副均为转动副,所以 fi = 1; 因为蛇形 机器人始终至少有一节接地,所以活动构件数为总构
MAO Xiang-yu, LI Qing-song, SHI Ming-luan ( School of Mechanical,Electronic,and Industrial Engineering, University of Electronic Science and Technology of China,Chengdu 611731,China)
摘 要: 在研究高冗余自由度蛇形机器人自由度的计算方法时,发现当蛇形机器人
所有舵机均带有负载时,蛇形机器人的自由度数等于舵机的总数。为实现高冗余
自由度蛇形机器人的多种运动模式,提出了一种新型的关节连接方式———十字轴
万向节连接方式,它由机械结构中经常用到的十字轴万向节演变而来,使每个体节
具有了 2 个自由度,并且实现了 2 个动力输出轴的完全正交。该结构使得蛇形机
度数 = 舵机的总数。
图 3 十字轴万向节变形图
2 个自由度,完全正交的特点省去了单体节式相邻连 接正交时的体节偏差,使控制更加简便和准确,而且要 实现同样的运动和自由度这种结构省去了一半的体 节。所以,十字轴万向节式结构具有很大的优势。 2. 2 具体机械结构
图 4 为十字轴万向节式蛇形机器人的实物图片, 共 6 节,每节含有 2 个舵机,共 12 个,带有 7 节电池, 相邻 2 节相对转角均可达到 - 90° ~ 90°。图 5 为蛇形 机器人单节整体三维效果图。
何桁 架 结 构 作 为 蛇 的 基 本 模 块 形 式; Bayrktarogulu 等[11-14]相继开 展 了 相 关 课 题 的 研 究。 本 文 提 出 了 一
种新的万向节连接方式———十字轴万向节连接,该结
第5 期
毛湘宇,等: 十字轴万向节式蛇形机器人机构设计
9
构适合在机器人实验教学中应用。
10
实验室研究与探索
第 32 卷
图 6 舵机摆放位置示意图( mm)
2. 3. 2 选择合适的正交面 ( 1) 选择正交面 1 和 3。要构件十字节式结构,
则需要先选定正交轴所在的正交面,如图 6( a) 所示, 我们选择在舵机 2 上建立正交面,以其轴线所在相互 垂直的两个面为正交面 1 和正交面 3。
( 1 ) 动 力 配 置。 本 蛇 形 机 器 人 动 力 全 部 采 MG995 舵机,该舵机可以实现 180°转角,质量 62 g,无 负载速度 0. 17 s /60°( 4. 8 V) ,扭矩 127. 4 N·cm,具 有质量轻扭矩大的特点,非常适合蛇形机器人的使用。 每节均有 2 个舵机。
根据加工条件和实际需要,选择了最为常见的标 准渐开线直齿轮,其具体参数为: 压力角 20°,齿顶高 系数 1,顶隙系数 0. 25,模数为 m = 1. 0,所以,齿轮齿 数 Z = D / m = 26。
齿轮安装及啮合示意图如图 8 所示。下面的齿轮 为主动轮,上侧的为被动轮,主动轮用螺丝固定在舵盘 上,从动轮通过轴承连接在从动轮固定座( 见图 6) 上。
舵机 1 的动力输出轴和向下节传递动力的轴线 K 间距为 24. 0 mm,所以需要机构将动力进行转换,平行 轴线间的动力转换连接方式有很多,适合较小距离且 可靠的连接方式首选齿轮,对于少量齿轮使用线切割 工艺加工成本较低,可满足需求,所以采用齿轮连接。
齿轮参数: 从动齿 轮 和 主 动 齿 轮 轴 线 间 距 24. 0 mm,即中心距 S = 24. 0 mm,2 个齿轮传动比为 1,故 2 个齿轮尺寸完全相同。分度圆直径 D = S = 24 mm。
件数减去 1,即
n = 所有构件数 - 1
( 2)
蛇形机器人的自由度运算公式可推导为
M = 6n - 5g
( 3)
也可以从另一方面分析蛇形机器人自由度,即对于一
个有着确定运动的机构,机构的总自由度数即为动力
源的数目,否则运动不确定。
以上两种方式计算所得结果相同,即当蛇形机器
人所有舵机均带有负载时,总满足: 蛇形机器人的自由
( 2) 安装面。要将动力传输,需要将连接件固定 在舵盘和虚轴上,连接件和舵盘、虚轴的接触面或等效 接触面称为安装面,一对安装面应关于正交面对称。
根据上述原则可得到: 舵机 2 相关连接件的安装 面为 Z1 、Z2 ,关于正交面 2 对称; 舵机 1 相关连接件的 安装面为 Z3 、Z4 ,如图 6( a) 、( b) 所示。 2. 3. 5 齿轮设计
( 2) 选择正交面 2。首先正交面 2 应垂直于正交 面 1,但是正交面 2 距舵机 2 的舵盘面( 图 6 面 Z1 ) 的 距离不能确定,但是必须满足: ① 使面 Z1 关于正交面 的对称面 Z2 在舵机 1 下端面以下,且要留有一定余 量。② 使舵机 2 轴线和正交面相交产生的轴线( 图 6 中 K 轴) 间距为整数。经过调整,确定面 Z1 、Z2 间距 为 76 mm,舵机 2 轴线与 K 轴间距 24. 0 mm,正交面 2 和面 Z1 、Z2 间距离 38 mm。