西华大学实验报告封面(理工类)
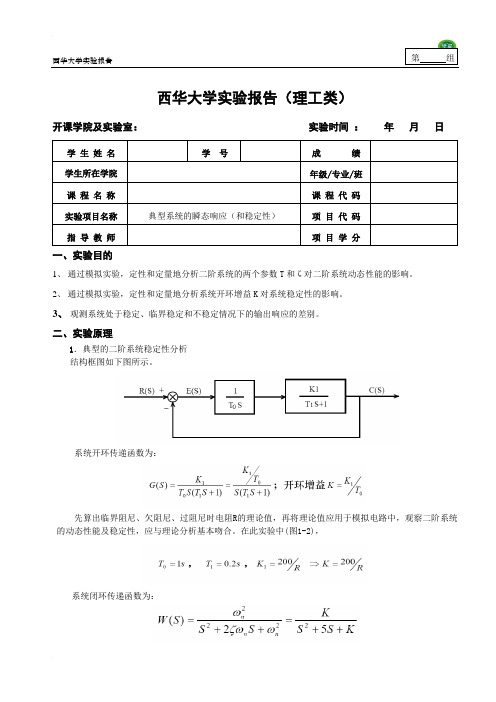
《自动控制理论》实验报告
1.实验接线:按模拟电路图2-5接线,检查无误后方可开启设备电源。
五、实验过程记录(数据、图表、计算等)
1、观察电机转速及示波器上给定值与反馈值的波形,分析其响应特性,结果记录在表4-1中。
2、记录较好的一组较好的控制参数,结果记录在表4-1中。
项目参数
IBAND
KPP
KII
KDD
超调
稳定<2%时间
例程中参数响应特性
0060H
1060H
1010H
0020H
自测一组较好参数
2.直接测量方法(测对象的闭环波特图)
(1)将示波器单元的“SIN”接至图2-5中的信号输入端,“CH1”路表笔插至图2-5中的4#运放的输出端。
(2)打开集成软件中的频率特性测量界面,弹出时域窗口,点击 按钮,在弹出的窗口中根据需要设置好几组正弦波信号的角频率和幅值,选择测量方式为“直接”测量,每组参数应选择合适的波形比例系数,具体如下图所示:
点击极坐标图按钮 ,可以得到对象的闭环极坐标图。
(5)根据所测图形可适当修改正弦波信号的角频率和幅值重新测量,达到满意的效果。
3.间接测量方法:(测对象的开环波特图)
将示波器的“CH1”接至3#运放的输出端,“CH2”接至1#运放的输出端。按直接测量的参数将参数设置好,将测量方式改为间接测量。此时相位差是指反馈信号和误差信号的相位差,应将两根游标放在反馈和误差信号上。测得对象的开环波特图。
1西华大学实验报告-2010
序号:学生实验报告课程名称:多媒体信息基础选课课号:2002001学生所在学院:管理学院年级/专业/班:2008级工商管理1班学生姓名:沈发萍学号:312008*********实验总成绩:任课教师:阳宪章实验中心名称:信息科学与技术教学部实验一MPC系统配置设计姓名:沈发萍学号:312008*********实验时间: 2010-3-18 成绩:实验目的:1、掌握MPC硬件系统的构成2、掌握MPC软件系统的构成3、掌握多媒体计算机的各个部件的功能协调配置实验内容:a) 说明设计主题、思路、实现的策略、设计分析;b) 按照教程上所讲的计算机各个部件的特征、实现功能,在网络上找出对应的部件和软件;c) 根据比较分析各个部件及软件,组合成一套完整的多媒体计算机系统。
操作步骤:第一步MPC硬件信息搜索第二步MPC软件信息搜索第三步功能比较分析第四步硬件配置设计第五步软件配置设计第六步配置设计的功能说明[注] 每位学员至少各作一套低端和一套高端MPC系统配置设计,并体现在“MPC硬件配置表(低端)”、“MPC软件配置表(低端)”和“MPC硬件配置表(高端)”、“MPC硬件配置表(高端)”中。
配置设计说明(一):1、满足多媒体信息处理的基本要求;2、满足大多数多媒体信息再现的基本需要。
设计者:沈发萍 2010年03 月18日配置设计说明:1、满足一般多媒体信息普通处理的需要;设计者:沈发萍 2010年3月18日配置设计说明:1、满足多媒体信息的一般处理能力,能够支持超级动画、电视电影特技处理;2、突出支持多媒体信息的处理速度和;3、突出支持多媒体信息时显示的层次感;4、支持快速处理多媒体信息时的动能供给;设计者:沈发萍 2010年3月18日配置设计说明:1、满足用户多媒体信息普通处理的需要;2、具备大多数多媒体信息爱好者所需的强大功能。
设计者:沈发萍 2010年3月18日实验二 PowerPoint 处理多媒体姓名:沈发萍学号:312008*********实验时间:2010-4-5 成绩:一、实验目的:合理地在幻灯片中插入和播放动画和多媒体视频文件,通过训练掌握PowerPoint XP 处理动画和视频方面的几项基本技术。
西华大学机器人创新设计实验报告(工业机械手模拟仿真)(新)
实验报告(理工类)课程名称: 机器人创新实验课程代码: 6003199 学院(直属系): 机械学院机械设计制造系年级/专业/班: 2010级机制3班学生姓名: 学号: 实验总成绩: 任课教师: 李炜开课学院: 机械工程与自动化学院实验中心名称: 机械工程基础实验中心一、设计题目工业机器人设计及仿真分析二、成员分工:(5分)三、设计方案:(整个系统工作原理和设计)(20分)1、功能分析工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
本次我们小组所设计的工业机器人主要用来完成以下任务:(1)、完成工业生产上主要焊接任务;(2)、能够在上产中完成油漆、染料等喷涂工作;(3)、完成加工工件的夹持、送料与转位任务;(5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品)2、总体方案设计按机械手手臂的不同形式及组合情况其活动范围也是不同的,基本上可以分为四种运动形式:直角坐标式、圆柱坐标式、球坐标式、关节坐标式。
20111129汽车液压与气压传动实验报告样式

交通与汽车工程学院实验报告课程名称: 汽车液压与气压传动课程代码: 6010189 年级/专业/班:2010级/车辆工程专业/汽设1班学生姓名: 学号: 实验总成绩: 任课教师: 开课学院: 交通与汽车工程学院实验中心名称: 汽车交通实验中心西华大学实验报告开课学院及实验室:交通与汽车工程学院结构实验室实验时间:年月日1、实验目的2、实验设备、仪器及材料3、实验内容一般实验(非上机实验):3.1.1实验方案设计与选择(设计性、创新性实验需写该项内容)3.1.2实验原理及实验步骤(实验工作原理或实验的主要操作过程)3.1.3实验记录(核心代码及调试过程)上机实验:3.2.1上机实验的内容及要求3.2.2算法设计思想与算法实现步骤3.2.3程序核心代码,程序调试过程中出现的问题及解决方法3.2.4 程序运行的结果注解:理工科实验需记录实验过程中的数据、图表、计算、现象观察等,实验过程中出现的问题;其它如在计算机上进行的编程、仿真性或模拟性实验需记录程序核心代码以及程序在调式过程中出现的问题及解决方法;记录程序执行的结果。
4、实验总结实验结果分析及问题讨论实验总结心得体会注解:实验总结的内容根据不同学科和类型实验要求不一样,一般理工科类的实验需要对实验结果进行分析,并且对实验过程中问题进行讨论;在计算机上进行的编程、仿真性或模拟性实验需要对上机实践结果进行分析,上机的心得体会及改进意见。
其它实验应总结实验过程写出心得体会及改进意见。
说明:各门实验课程实验报告的格式及内容要求,请按照实验指导书的要求手工书写。
实验一齿轮泵拆装实验1、实验目的液压元件是液压系统的重要组成部分,通过对齿轮泵的拆装,可加深对齿轮泵结构及工作原理的了解。
2、实验仪器、设备及材料拆装:齿轮泵。
内六角扳手、固定扳手、螺丝刀、游标卡尺。
3、实验内容——实验原理及步骤实验原理:齿轮泵为液压系统中的常见动力元件,其工作原理是靠齿轮的轮齿间的容积变化工作的。
传感器与检测技术实验报告

西华大学实验报告(理工类)开课学院及实验室:自动检测及自动化仪表实验室实验时间:年月日一、实验目的1.观察了解箔式应变片的结构及粘贴方式;2.测试应变梁变形的应变输出;3.比较各桥路间的输出关系;4.比较金属应变片与半导体应变片的各种的特点。
二、实验原理应变片是最常用的测力传感元件。
当用应变片测试时,应变片要牢固地粘贴在测试体表面,当测件受力发生形变,应变片的敏感栅随同变形,其电阻值也随之发生相应的变化。
通过测量电路,转换成电信号输出显示。
三、实验设备、仪器及材料直流稳压电源(±4V档)、电桥、差动放大器、箔式应变片、测微头、(或双孔悬臂梁、称重砝码)、电压表。
四、实验步骤(按照实际操作过程)1.调零。
开启仪器电源,差动放大器增益置100倍(顺时针方向旋到底),“+、-”输入端用实验线对地短路。
输出端接数字电压表,用“调零”电位器调整差动放大器输出电压为零,然后拔掉实验线。
调零后电位器位置不要变化,调零后关闭仪器电源。
2.按图1.1将实验部件用实验线连接成测试桥路。
桥路中R1、R2、R3、和WD为电桥中的固定电阻和直流调平衡电位器,R为金属箔式应变片(可任选上、下梁中的一片工作片)。
直流激励电源为±4V。
3.确认接线无误后开启仪器电源,并预热数分钟。
测微头装于悬臂梁前端的永久磁钢上,并调节使应变梁处于基本水平状态。
调整电桥WD电位器,使测试系统输出为零。
4.旋动测微头,带动悬臂梁分别作向上和向下的运动,以悬臂梁水平状态下电路输出电压为零为起点,向上和向下移动各5mm,测微头每移动0.5mm记录一个差动放大器输出电压值,并列表。
5.直流半桥:保持差动放大器增益不变,将R2换成与应变片R工作状态相反的另一金属箔式应变片,(若R拉伸,换上去的应为压缩片)形成半桥。
重复单臂电桥的步骤;6.直流全桥:保持差动放大器增益不变,将R1换成与应变片R工作状态相反的另一金属箔式应变片,(若R拉伸,换上去的应为压缩片),将 R3换成与应变片R工作状态相同的另一金属箔式应变片,形成全桥。
光纤通信实验报告

西华大学实验报告(理工类)开课学院及实验室: 电气与电子信息学院 6A203 实验时间 :2016年 6月 21日一、实验目的1、 了解光端机的工作原理2、 掌握数字光发送机的功率测量方法3、 理解平均光功率的含义二、实验原理光端机的平均发送光功率是指在正常工作条件下光端机输出的平均光功率,即光源尾纤输出的平均光功率。
平均发送光功率指标与实际的光纤线路有关,在长距离光纤数字通信系统中,要求有较大的平均发送功率;在短距离的光纤数字通信系统中,要求较小的平均发送光功率。
设计人员应根据整个光纤通信系统的经济性、稳定性和可维护性全面考虑该指标,提出合适的数值要求,而不是越大越好。
平均发送光功率测试框图如图一所示。
图一 光发送端光功率测试框图说明:1)平均光功率与PCM信号的码型有关,NRZ码与50%占空比的RZ码相比,其平均光功率要大3dB。
2)光源的平均输出光功率与注入它的电流大小有关,测试应在正常工作的注入电流条件下进行。
实验平台中,可以选择系统自身产生的2M伪随机序列来测试平均光功率,系统中PN序列的长度只有24-1,即15位。
三、实验设备、仪器及材料光功率计、HD-GX-Ⅲ型光纤通信实验箱、光纤跳线四、实验步骤(按照实际操作过程)1、用短接帽将跳线XP401的1、2两脚连接,这样选择传输的是系统内部产生的2M伪随机序列。
如果将2、3两脚连接,则传输的将是外部输入的2M数据。
2、选择光发模块甲。
用短接帽将跳线XP500的1、2脚相连,开关KS501选择传输数字信号。
3、从发送模块甲的光源组件连接器S中取出保护塑料套,用光纤跳线分别插入发送端连接器S与光功率计的输入连接器插头,连接光发送端的光输出与光功率计。
4、测试系统建立后,给实验平台加电,按复位键后,从键盘输入PN,以控制系统产生2M信号。
从光功率计上读出平均光功率值。
5、从键盘输入方波或CMI码,测试不同的数字信号驱动光源时,所产生的平均光功率。
继电保护实验报告三(理工类)
西华大学实验报告(理工类)开课学院及实验室: 实验时间 : 年 月 日一、实验目的1)熟悉阻抗继电器原理、特性及调整整定值的方法。
2)掌握阻抗继电器在线路距离保护中的应用和实现方法,以及与重合闸继电器的配合方式。
3)了解不同的运行方式对距离保护的影响。
4)了解同一变电站阻抗保护各段之间配合的动作过程。
二、实验原理随着电力系统的发展,出现了容量大、电压高或结构复杂的网络,这时简单的电流、电压保护难于满足电网对保护的要求。
例如,对于高压、长距离、重负荷线路,由于负荷电流大,线路末端短路时,短路电流的数值与负荷电流相差不大,故电流保护往往不能满足灵敏度的要求;对于电流速断保护,其保护范围随电网运行方式的变化而改变,保护范围不稳定,某些情况下甚至无保护区。
所以,如何使继电保护的灵敏度不受(或少受)系统运行方式的影响,这就是系统发展对继电保护提出的新要求。
阻抗保护就是适应此要求的一种保护。
1) 阻抗保护的基本原理所谓阻抗保护,就是指反映保护安装处至短路故障点的距离,并根据这一距离的远近而确定是否动作的一种保护装置,其基本原理图右图所示。
系统正常工作时,保护安装处测量到的电压为w U ,它接近于额定电压。
保护安装处测量到的电流为负荷电流L I ,则比值wm L U Z I =,基本上是负荷阻抗L Z ,其值较大,负荷阻抗角1k ϕ较小(一般为30°~40°)。
当右图所示k1点短路时,保护安装处测量到的电压为k1点短路时的残压111k k k U Z I =,测量到的电流为1k I ,则比值111k k k U Z I =。
当k2点短路时,则有222222()k k AB k AB k k k U I Z Z Z Z I I +==+ 后两种状态下的阻抗值均较小,而阻抗角为k ϕ其值较大。
显然利用电压和电流的比值,不但能清楚地判断系统的正常工作状态和短路状态,还能反映短路点到保护安装处的电气距离。
实验六:文件操作
西华大学实验报告(理工类)开课学院及实验室: 实验时间 : 年 月 日一、实验目的1、了解C#对于不同类型文件的读写方式。
2、学会使用System.IO.File 和System.IO.FileInfo 两个类用来对文件进行操作。
3、学会使用C#进行常用的文件操作。
4、学会使用System.IO.Directory 和System.IO.DirectoryInfo 两个类来对目录进行操作。
5、掌握C#对XML 的操作方法。
二、实验原理1、文件与目录管理是操作系统的一个重要组成部分,包括文件和目录的创建、移动、删除、复制以及对文件的读写等操作。
对于不同类型的文件C#提供了不同的读写方式。
2、System.IO.File 类的成员都是静态的,多用于对文件的一次性操作,System.IO.FileInfo 类是实例化类,多用于对文件的重复操作,可根据实际情况合理选用适合的文件操作类。
3、C#提供多种方式用于实现某一特定文件操作,包括:创建文件、读取文件、追加内容、复制文件、删除文件、移动文件等。
4、Directory 类提供用于创建、移动和枚举目录和子目录的静态方法,在使用时需要引用System.IO 命名空间。
5、DirectoryInfo 类提供用于创建、移动和枚举目录和子目录的实例方法。
6、C#提供多种方式用于实现某一特定目录操作,包括:创建目录、删除目录、移动目录、创建子目录、枚举目录中的目录名、枚举目录中的文件名、判断目录是否存在等。
7、XML (可扩展标记语言)可以对文档和数据进行结构化处理,被广泛应用于在网络上传输和存储数据。
8、序列化就是将对象的状态信息转换为可以存储或传输形式的过程,就是将对象持久化比如把对象保存为二进制或者XML 的方式。
三、实验设备、仪器及材料Windows环境计算机、Visual Studio 2012软件四、实验步骤(按照实际操作过程)1、要求:将来自于网络上的水浒 108 个人物的信息从一个文本文件中抽取出任务信息字段,包括每个人物的“所属星”、“绰号”、“姓名”、“说明”,将抽取出来的信息字段按人物逐条写入形成一个 Excel 文件,实现对水浒 108 个人物信息的整理。
电力系统分析实验报告四(理工类)
西华大学实验报告(理工类)开课学院及实验室: 实验时间 : 年 月 日一、实验目的1)初步掌握电力系统物理模拟实验的基本方法。
2)加深理解功率极限的概念,在实验中体会各种提高功率极限措施的作用。
3)通过对实验中各种现象的观察,结合所学的理论知识,培养理论结合实际及分析问题的能力。
二、实验原理所谓简单电力系统,一般是指发电机通过变压器、输电线路与无限大容量母线联接而且不计各元件的电阻和导纳的输电系统。
对于简单系统,如发电机至系统d 轴和g 轴总电抗分别为d X ∑和q X ∑,则发电机的功率特性为2()sin sin 2q d q Eq d d q E UX X U P X X X δδ∑∑∑∑∑-=+⨯⨯当发电机装有励磁调节器时,发电机电势q E 随运行情况而变化,根据一般励磁调节器的性能,可认为保持发电机'q E (或'E )恒定。
这时发电机的功率特性可表示成''2'''''()sin sin 2Eq q d q d d q E UX X U P X X X δδ∑∑∑∑∑-=+⨯⨯ 或''''sin E q d E UP Xδ∑=这时功率极限为'''Em q d E UP X∑=随着电力系统的发展和扩大,电力系统的稳定性问题更加突出,而提高电力系统稳定性和输送能力的最重要手段之一,就是尽可能提高电力系统的功率极限。
从简单电力系统功率极限的表达式看,要提高功率极限,可以通过发电机装设性能良好的励磁调节器,以提高发电机电势、增加并联运行线路回路数;或通过串联电容补偿等手段,以减少系统电抗,使受端系统维持较高的运行电压水平;或输电线采用中继同步调相机、中继电力系统等手段以稳定系统中继点电压。
(3)实验内容1)无调节励磁时,功率特性和功率极隈的测定 ①网络结构变化对系统静态稳定的影响(改变戈):在相同的运行条件下(即系统电压U-、发电机电势E 。
实验报告样本
第 页
西华大学实验报告(理工类)
开课学院及实验室:交通与汽车工程学院 交通工程实验室 实验时间: 年 月 日
1、实验目的
2、实验设备、仪器及材料
3、实验内容
3.1实验方案设计与选择
3.2实验原理及实验步骤(实验工作原理、实验的主要操作过程或流程)
3.3实验记录(主要操作步骤的结果)
注解:理工科实验需记录实验过程中的数据、图表、计算、现象观察等,实验过程中出现的问题及解决方法;记录程序执行的结果。
4、实验总结
4.1实验结果分析及问题讨论
4.2实验总结心得体会
4.3附录
注解:实验总结的内容根据不同学科和类型实验要求不一样,一般理工科类的实验需要对实验结果进行分析,并且对实验过程中问题进行讨论;在计算机上进行的编程、仿真性或模拟性实验需要对上机实践结果进行分析,上机的心得体会及改进意见。
其它实验应总结实验过程写出心得体会及改进意见。