理论力学第五章 点的运动
理论力学答案第5章点的复合运动分析
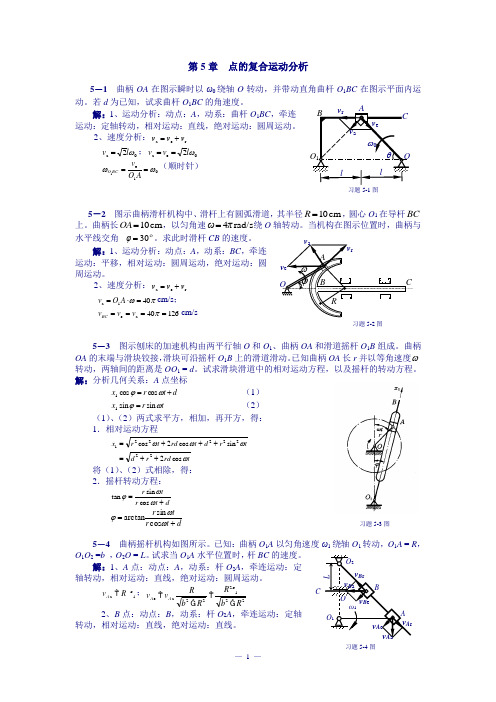
第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω==AO v BC O (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴转动。
当机构在图示位置时,曲柄与水平线交角 30=φ。
求此时滑杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v +=πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程trd r d t r d t rd t r x ωωωωcos 2sin cos 2cos 22222221++=+++=将(1)、(2)式相除,得: 2.摇杆转动方程: dt r tr +=ωωϕcos sin tandt r t r +=ωωϕcos sin arctan5-4 曲柄摇杆机构如图所示。
理论力学(5.6)--点的运动学-思考题
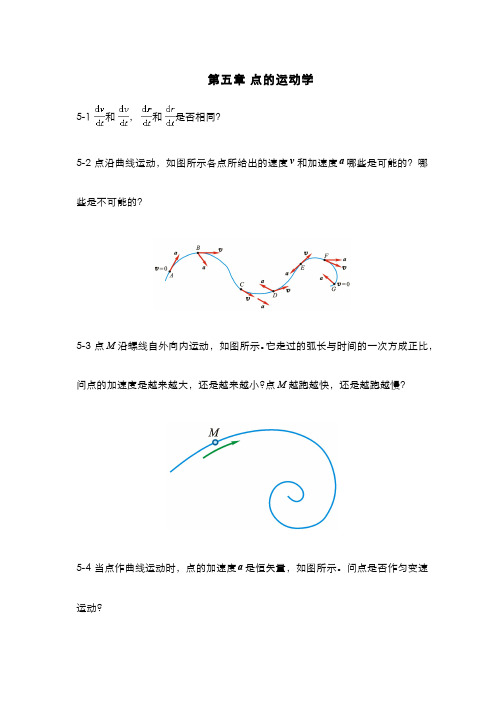
第五章 点的运动学5-1和 , 和 是否相同?5-2点沿曲线运动,如图所示各点所给出的速度v和加速度a哪些是可能的?哪些是不可能的?5-3点M 沿螺线自外向内运动,如图所示。
它走过的弧长与时间的一次方成正比,问点的加速度是越来越大,还是越来越小?点M越跑越快,还是越跑越慢?5-4当点作曲线运动时,点的加速度a是恒矢量,如图所示。
问点是否作匀变速运动?5-5 作曲线运动的两个动点,初速度相同、运动轨迹相同、运动中两点的法向加速度也相同。
判断下述说法是否正确:(1)任一瞬时两动点的切向加速度必相同;(2)任一瞬时两动点的速度必相同;(3)两动点的运动方程必相同。
5-6 动点在平面内运动,已知其运动轨迹)(x f y 及其速度在x 轴方向的分量。
判断下述说法是否正确:(1)动点的速度可完全确定;(2)动点的加速度在x 轴方向的分量可完全确定;(3)当速度在x 轴方向的分量不为零时,一定能确定动点的速度、切向加速度、法向加速度及全加速度。
5-7 下述各种情况,动点的全加速度,切向加速度和法向加速度三个矢量之间有何关系?(1)点沿曲线作匀速运动;(2)点沿曲线运动,在该瞬时其速度为零;(3)点沿直线作变速运动;(4)点沿曲线作变速运动。
5-8 点作曲线运动时,下述说法是否正确:(1)若切向加速度为正,则点作加速运动;(2)若切向加速度与速度的符号相同,则点作加速运动;(3)若切向加速度为零,则速度为常矢量。
5-9 在极坐标系中,ρρ =v ,ρϕϕ =v 分别代表在极径方向与极径垂直方向(极角ϕ的方向)的速度。
但为什么沿这两个方向的加速度为2ϕρρρ -=a ϕρϕρϕ 2+=a 试分析ρa 中2ϕρρ -=a 和ϕa 中的ϕρ 出现的原因和它们的几何意义。
理论力学运动学基础
第五章运动学基础一、是非题1.已知直角坐标描述的点的运动方程为X=f1(t),y=f2(t),z=f3(t),则任一瞬时点的速度、加速度即可确定。
()2.一动点如果在某瞬时的法向加速度等于零,而其切向加速度不等于零,尚不能决定该点是作直线运动还是作曲线运动。
()3.切向加速度只表示速度方向的变化率,而与速度的大小无关。
()4.由于加速度a永远位于轨迹上动点处的密切面内,故a在副法线上的投影恒等于零。
()5.在自然坐标系中,如果速度υ=常数,则加速度α=0。
()6.在刚体运动过程中,若其上有一条直线始终平行于它的初始位置,这种刚体的运动就是平动。
()7.刚体平动时,若刚体上任一点的运动已知,则其它各点的运动随之确定。
()8.若刚体内各点均作圆周运动,则此刚体的运动必是定轴转动。
()9.定轴转动刚体上点的速度可以用矢积表示为v=w×r,其中w是刚体的角速度矢量,r是从定轴上任一点引出的矢径。
()10、在任意初始条件下,刚体不受力的作用、则应保持静止或作等速直线平动。
()二、选择题1、已知某点的运动方程为S=a+bt2(S以米计,t以秒计,a、b为常数),则点的轨迹。
①是直线;②是曲线;③不能确定。
2、一动点作平面曲线运动,若其速率不变,则其速度矢量与加速度矢量。
①平行;②垂直;③夹角随时间变化。
3、刚体作定轴转动时,切向加速度为,法向加速度为。
①r×ε②ε×r③ω×v④v×ω4、杆OA绕固定轴O转动,某瞬时杆端A点的加速度α分别如图(a)、(b)、(c)所示。
则该瞬时的角速度为零,的角加速度为零。
①图(a)系统;②图(b)系统;③图(c)系统。
三、填空题1、点在运动过程中,在下列条件下,各作何种运动?①aτ=0,a n=0(答):;②aτ≠0,a n=0(答):;③aτ=0,a n≠0(答):;④aτ≠0,a n≠0(答):;2、杆O1B以匀角速ω绕O1轴转动,通过套筒A带动杆O2A绕O2轴转动,若O1O2=O2A=L,α=ωt,则用自然坐标表示(以O1为原点,顺时针转向为正向)的套筒A 的运动方程为s=。
理论力学(机械工业出版社)第五章点的运动学习题解答

习 题5-1 如图5-13所示,偏心轮半径为R ,绕轴O 转动,转角t ωϕ=(ω为常量),偏心距e OC =,偏心轮带动顶杆AB 沿铅垂直线作往复运动。
试求顶杆的运动方程和速度。
图5-13)(cos )sin(222t e R t e y ωω-+=)(cos 2)2sin()[cos(222t e R t e t e yv ωωωω-+==5-2 梯子的一端A 放在水平地面上,另一端B 靠在竖直的墙上,如图5-14所示。
梯子保持在竖直平面内沿墙滑下。
已知点A 的速度为常值v 0,M 为梯子上的一点,设MA = l ,MB = h 。
试求当梯子与墙的夹角为θ时,试点M 速度和加速度的大小。
图5-14A M x hl hh x +==θsin θcos l y M = 0cos v h l h x h l h h xA M +=+== θθ 得 θθcos )(0h l v +=θθθθθt a n)(c o s )(s i n s i n 00h l lv h l v l l yM +-=+⨯-=-= 0=M xθθθθθ322002020cos )(cos )(sec )(sec )(h l lv h l v h l lv h l lv y M +-=+⨯+-=+-=θ3220cos )(h l lv a M+=5-3 已知杆OA 与铅直线夹角6/πt =ϕ( 以 rad 计,t 以s 计),小环M 套在杆OA 、CD 上,如图5-15所示。
铰O至水平杆CD 的距离h =400 mm 。
试求t = 1 s 时,小环M 的速度和加速度。
图5-15ϕtan h x M = ϕϕϕ22sec 6π400sec ⨯== h xM ϕϕϕϕϕϕϕs i n s e c 9π200s i n s e c 6π3π400)s i n s e c 2(6π4003233=⨯⨯=⨯⨯= M x当s 1=t 时6π=ϕmm/s 3.2799π800346π400)6π(sec 6π4002==⨯==Mv 223232mm/s 8.168327π80021)32(9π200)6πsin()6π(sec 9π200==⨯⨯=⨯⨯=Ma5-4 点M 以匀速u 在直管OA 内运动,直管OA 又按t ωϕ=规律绕O 转动,如图5-16所示。
理论力学(第7版)第五章 点的运动学

运 动 规 律
[例5-1 ] 已知点的运动方程为x=2sin 4t m,y=2cos 4t m, z=4t m。 求:点运动轨迹的曲率半径 。
解:
vx x 8 cos 4t , ax 32 sin 4t x
r r t
—以矢量表示的 点的运动方程
矢端曲线:动点M在运动过程中,矢 径r的末端绘出的一条连续曲线。 ——动点M的运动轨迹
3
二.点的速度
dr v r dt
方向:沿着矢径r的矢端曲线的切线 方向,且与此点的运动方向一致。
大小:速度矢的模,表明点运动的快慢。
三.加速度
dv d 2r a r 2 dt dt
dv v2 a a a n a a n n n dt
17
5-3 自然法 曲率(1 / ) :
定义——曲线切线的转角对弧长 一阶导数的绝对值。表示曲线的 弯曲程度。
d lim| | t 0 S dS 1
由于a , an均在密切面内,全加速a必在密切面内。 度
— 与 弧 坐 标 的 正 向 一 致 n — 指 向 曲 线 内 凹 一 侧 b — 与 , n 构 成 右 手 系
b n
[注]:自然坐标系是沿曲 13 线而变动的游动坐标系。
(动画自然坐标轴的几何性质)
曲线在P点的密切面形成
5-3 自然法
二.点的速度
当t 0时,r MM' S
v y y 8 sin 4t , a y 32 cos 4t y
v z z 4, a z 0 z
2 2 2 2 v v x v 2 v z 80 m s , a a x a 2 a z 32m s 2 y y
05 点的运动学 理论力学

南通大学建筑工程学院 力学教研室 金江
运动学
物体运动规律比平衡规律复杂很多,采用运动 学和动力学来进行研究。
运动学是从几何的观点来研究物体的机械运动,不 考虑运动原因
两种模型:点和刚体 学习运动学的目的: 为学习动力学提供必要的基础知识 工程实际中独立的应用价值
运动学 第五章 点的运动学
τ 2 τ sin 2
5-3 自然法
Δ
τ
M
s
Δφ
M'
Δτ
τ ''
τ'
d lim s 0 s ds 1
0
τ
s 0
τ 1
∆τ与 τ垂直
运动学
dτ τ 1 lim lim n n s 0 s 0 ds s s
dr dx dy dz v i j k dt dt dt dt
运动学
v vx i v y j vz k
dx vx x dt dy vy y dt dz vz z dt
5-2 直角坐标法 速度大小
dx dy dz 2 2 2 v vx vy vz dt dt dt
面 法平
b
密切 面
M1
M
n
线 主法
τ1
τ τ 1'
切线
主法线——法平面与密切面的交线,单位方向矢量n, 指向曲线内凹一侧
副法线——过点 M且垂直于切线及主法线的直线
b τ n
运动轨 迹
运动学
点运动时,在轨迹曲线 上位置变化,其自然轴 系的方位也改变 曲线运动,轨迹的曲率或 曲率半径是重要的参数, 表示曲线的弯曲程度
理论力学运动学知识点总结

理论力学运动学知识点总结第一篇:理论力学运动学知识点总结运动学重要知识点一、刚体的简单运动知识点总结1.刚体运动的最简单形式为平行移动和绕定轴转动。
2.刚体平行移动。
·刚体内任一直线段在运动过程中,始终与它的最初位置平行,此种运动称为刚体平行移动,或平移。
·刚体作平移时,刚体内各点的轨迹形状完全相同,各点的轨迹可能是直线,也可能是曲线。
·刚体作平移时,在同一瞬时刚体内各点的速度和加速度大小、方向都相同。
3.刚体绕定轴转动。
• 刚体运动时,其中有两点保持不动,此运动称为刚体绕定轴转动,或转动。
• 刚体的转动方程φ=f(t)表示刚体的位置随时间的变化规律。
• 角速度ω表示刚体转动快慢程度和转向,是代数量,以用矢量表示。
,当α与ω。
角速度也可• 角加速度表示角速度对时间的变化率,是代数量,同号时,刚体作匀加速转动;当α 与ω异号时,刚体作匀减速转动。
角加速度也可以用矢量表示。
• 绕定轴转动刚体上点的速度、加速度与角速度、角加速度的关系:。
速度、加速度的代数值为。
• 传动比。
一、点的运动合成知识点总结1.点的绝对运动为点的牵连运动和相对运动的合成结果。
• 绝对运动:动点相对于定参考系的运动;• 相对运动:动点相对于动参考系的运动;• 牵连运动:动参考系相对于定参考系的运动。
2.点的速度合成定理。
• 绝对速度:动点相对于定参考系运动的速度;• 相对速度:动点相对于动参考系运动的速度;• 牵连速度:动参考系上与动点相重合的那一点相对于定参考系运动的速度。
3.点的加速度合成定理。
• 绝对加速度:动点相对于定参考系运动的加速度;• 相对加速度:动点相对于动参考系运动的加速度;• 牵连加速度:动参考系上与动点相重合的那一点相对于定参考系运动的加速度;• 科氏加速度:牵连运动为转动时,牵连运动和相对运动相互影响而出现的一项附加的加速度。
• 当动参考系作平移或 = 0,或与平行时,= 0。
点的运动方程
例4-1
直杆 AB两端分别沿两互相垂直的固定直线 Ox与Oy 运动,如图4-7 所示。试确定杆上任一点 M 的运动方程和轨迹方程,
已知 MA a ,MB b , t 。 解 选取直角坐标系 Oxy ,则动点 M 的坐标 x ,y 为
理论力学
点的运动方程
点在空间运动所经过的路线,称为点的运动轨迹。点的运动轨迹如 为直线,则称为直线运动;如为曲线,则称为曲线运动。
若动点 M 做直线运动,可取此直线为 x 轴,如图4-1所示。在直线上任选
一点 O 为坐标原点,并选某一方向为正向,则动点 M 的位置可由它的
坐标 x 确定。
4-1
当动点运动时,它的坐标 x 随时间变化,在一般情况下,坐标 x 是时间
当动点 M 始终在同一平面内运动时,如取这个平面为坐标 Oxy
平面 ,则运动方程(4-3)就简化为
x y
f1 (t) f2 (t)
(4-4)
消去 t 之后,即是轨迹方程
f (x ,y) 0
矢径法
如图4-4所示,设动点 M 沿任一空间曲线运动,选空间任意一点 作 为原点,则动点的位置可由如下的矢径来表示:
x y
f1 (t ) f2 (t)
(4-3)
z f3 (t)
图4-3
式(4-3)就是动点 M 的直角坐标运动方程。 若函数 x f1(t),y f2(t),z f3(t) 都已知,则动点 M 在任 一瞬时的位置即可完全确定。
由上述方程消去时间 ,即可得到 x ,y ,z 之间的关系式 F(x ,y ,z) 0 , 这就是动点的轨迹方程。
r
f1 (t) f2 (t)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 点的运动\描述点运动的直角坐标表示法
5.2.3 用直角坐标表示点的加速度
与前述点的速度和点的位置的关系类 似,由于动点的加速度等于速度对时间的 一阶导数,所以加速度a在坐标轴上的投 影ax、 ay、 az分别等于速度v在坐标轴上的 x 投影vx、vy、vz对时间t的一阶导数,即
dv x d 2 x ax dt dt dv y d 2 y ay dt dt dv z d 2 z az dt dt
2 2 v vx vy r
可见动点速度的大小是常数。速度v与x轴正向夹角的余弦为 vx π cos( v , i ) sin t cos( t ) v 2 π 由此可知,动点速度的方向与x轴正向的夹角是 t 2 目录
第五章 点的运动\描述点运动的直角坐标表示法 动点的加速度在坐标轴上的投影为 a x r 2 cost a y r 2 sin t 因此加速度的大小为
5.2.1 用直角坐标表示点的运动方程
动点M在空间运动时它在某瞬时的位 置也可以用空间直角坐标系的坐标(x,y,z) 来表示(如图) ,(x,y,z)称为动点的位置 坐标,坐标值x,y,z都是时间t的单值连续函 x 数,即
x x(t ) y y (t ) z z (t )
r r (t )
上式称为动点M的矢量形式的运动方程。点运动时,位置矢量r的末 端所描绘的曲线即为动点的运动轨迹。 目录
第五章 点的运动\描述点运动的矢量表示法 M' 设动点在某瞬时t位于M,其位置矢量为r(t), v* Δ r 在t+Δt瞬时动点位于M ,其位置矢量为r(t+Δt)。 r(t) 在Δt时间间隔内动点的运动轨迹为MM,位置 r(t+Δt) 矢量的改变Δr称为动点M的位移。 O 当Δt很小时可近似地用Δr表示在该时间间隔内动点走过的弧长 r * v 及运动方向, 称为动点在时间间隔Δt内的平均速度。 t r 当Δt趋于零时, 的极限称为动点在瞬时t的速度,即 t r dr v lim dt t 0 t 因此,动点的速度等于动点的位置矢量对时间的一阶导数。动 点的速度是矢量,它的方向是Δr的极限方向,即沿轨迹曲线在M点 的切线,并指向动点的运动方向。 速度的单位是m/s,有时也用km/h。 目录
第五章 点的运动\描述点运动的弧坐标表示法
dr τ ds 式中:—沿轨迹切向指向弧坐标正向的单位矢量。此外,
ds s ds lim v ,显然这是速度的代数值,当 0 时,s随时间t而 dt dt t 0 t ds 增大,v的指向与 相同;当 < 0 时,s随时间t而减小,v的指向与 dt
z M r O z x y
y
这就是动点M的直角坐标运动方程。当函数x=x(t), y=y(t), z=z(t)已知 时,动点M在任一瞬时的位置就完全确定。从上式消去t,即得动点 的轨迹方程 F ( x, y, z ) 0 目录
第五章 点的运动\描述点运动的直角坐标表示法 当动点始终在同一平面内运动时,如取该平面为坐标平面Oxy, 则动点的运动方程为
目录
第五章 点的运动\描述点运动的直角坐标表示法
【解】 由于重物作直线运动,以地面上的 B为坐标原点沿铅垂方向建立坐标轴y。由图中 的几何关系,M点的运动方程为
y (v0t ) 2 (9 1) 2 8 t 2 82 8
M点的速度为
dy v dt t t 2 64
x x(t ) y y (t )
当动点始终沿一直线运动时,如取该直线为坐标轴Ox,则动点 的运动方程为
x x(t )
目录
第五章 点的运动\描述点运动的直角坐标表示法
5.2.2 用直角坐标表示点的速度
如图所示,若以O点为坐标原点建立 Oxyz直角坐标系,则动点的位置矢量r 可表示为
第二篇 运动学
第二篇 运动学
运动学的任务是研究如何描述物体的运动,由于物体的运动一 般是用其位置及位置随时间的变化规律来描述的,所以运动学只是 从几何的角度来研究物体的运动而不涉及引起和影响物体运动变化 的因素(作用于物体上的力和物体本身的质量等)。 学习运动学的目的一方面是为学习动力学作准备,另一方面运 动学的有关知识也往往直接应用于工程实际中对物体运动规律的分 析。
返回
第五章 点的运动\描述点运动的矢量表示法
5.1 描述点运动的矢量表示法
5.1.1 用矢量表示点的运动方程
点的运动通常是用某瞬时点所处的位置 M 来描述的。 为表示动点M在某瞬时的位置,可在参考 r( t ) 系上任选一固定点O,由O点到所研究的动点 M作一矢量r,动点M的位置就可以用该矢量 O 表示(如图)。 r称为动点M的位置矢量。 显然,在某瞬时只要已知矢量r,则动点M的位置可以完全确定。 当点运动时,其位置矢量r随时间而变化,是时间t的单值连续函数, 即
2 2 a ax ay r 2
y a O
v M
t
x
可见动点加速度的大小是常数。加速度a与x轴正向夹角的余弦为 a cos(a, i ) x cost cos(π t ) a 由此可知,动点加速度的方向与x轴正向的夹角是π+ωt,指向 圆心。
目录
第五章 点的运动\描述点运动的直角坐标表示法 【例5.2】 牵引车自B点沿水平面匀速开出, 速度v0=1m/s,通过 绕过A的定滑轮将重物M自地面提起,如图所示,若滑轮A距地面高 为9m,车上的牵引钩距地面高为1m, 求重物M的运动方程、速度和 加速度,以及重物由地面升到A处所需的时间。
返回
第五章 点的运动
第五章 点的运动
本章介绍描述点的运动的三种方法:矢量表示法、直角坐标表 示法、弧坐标表示法,及如何利用这三种方法建立点的运动方程 (用以描述点的位置随时间变化的规律)、求点的速度和加速度。
5.1 描述点运动的矢量表示法 5.2 描述点运动的直角坐标表示法 5.3 描述点运动的弧坐标表示法
z M k O r z
a
v x y
i
j y
上式表明,动点的加速度在各坐标轴上的投影分别等于动点相 应的位置坐标对时间t的二阶导数。 目录
第五章 点的运动\描述点运动的直角坐标表示法 加速度的大小及方向余弦为
2 2 2 d x d y d z 2 2 2 2 2 2 a ax a y az ( 2 ) ( 2 ) ( 2 ) dt dt dt ay ax az cosa , i cosa , j cosa , k a a a
s s(t )
上式称为动点M的弧坐标运动方程。显然,当函数s=s(t)已知时,任 意瞬时动点M在轨迹曲线上的位置就完全确定了。
目录
第五章 点的运动\描述点运动的弧坐标表示法
5.3.2 用弧坐标表示点的 速度
如图所示,设动点在某平面 O 内运动,其运动轨迹已知,沿该轨 r' 迹的运动方程为s=s(t), 在瞬时t, ( +) r 动点M的位置矢量为r,经过时间 s 间隔Δt,动点M沿已知轨迹运动到 r O' M M,其位置矢量为r,动点在Δt时 M' (-) s 间间隔内的位移为Δr,相应的弧坐 v 标增量为Δs。动点的速度为 dr dr ds dr ds v dt dt ds ds dt 当Δs →0时,Δr/Δs的大小趋于1,Δr/Δs 的方向总是趋于弧坐标的正 向(若Δs >0,Δr的方向趋于弧坐标的正向,Δr/Δs也趋于弧坐标的正 向;若Δs<0,由于Δr的方向趋于弧坐标的负向,故Δr/Δs 仍趋于弧坐 标的正向),且与轨迹相切,所以始终有 目录
M v' a*
v Δv v'
a
v 当Δt 趋于零时 , 的极限称为动点在瞬时t的加速度,即 t 2
a lim
t 0
因此,动点的加速度等于动点的速度对时间的一阶导数,或等 于动点的位置矢量对时间的二阶导数。 加速度的单位是m/s2。
目录
第五章 点的运动\描述点运动的直角坐标表示法
5.2 描述点运动的直角坐标表示法
返回
第二篇 运动学
在研究物体运动时首先应明确两个问题。一个是关于运动的相 对性,描述物体运动时必须指出物体是相对另外哪个物体的运动, 另外那个物体称为该物体运动的参考体,固结于参考体上的坐标系 称为参考坐标系或参考系。今后若不特别说明,我们所说的物体的 运动都是相对于地面而言的,即参考系是固结在地面上的。另一个 是关于时间的两个概念,即瞬时和时间间隔,所谓瞬时是指某一具 体时刻,如第5秒,它与时间轴上的一点对应;所谓时间间隔是指 某一段时间,如第1秒至第5秒,其时间间隔是4秒,它与时间轴上 的一个区间对应。物体运动中的位置与瞬时相对应,位移与时间间 隔相对应。 运动学中研究的对象是点(或称动点)和刚体。这里的“点” 或是由物体抽象得来的或就是物体上某一具体的点。之所以不称其 为质点,是因为运动学只单纯研究点的运动问题,而不涉及其质量。
M点的加速度为
a
dv dt
t
64
2
64
3
当M点升到A处时,y =9m,代入运动方程 9 t 2 64 8 得 t=15 s 目录
第五章 点的运动\描述点运动的弧坐标表示法
5.3 描述点运动的弧坐标表示法
5.3.1 用弧坐标表示点的运动方程
s 若动点运动的轨迹曲线是已知的,为 (+) 确定任意瞬时动点在轨迹曲线上的位置, 可在轨迹曲线上任选一点O作为坐标原点, O 以动点的轨迹曲线为坐标轴,并规定O点的 (-) 某一边为正方向,另一边为负方向,动点M的位置用由O点到动点 的弧长OM=s来表示,s称为动点M的弧坐标,并规定动点M在坐标 轴正向时弧坐标为正,在坐标轴负向时弧坐标为负,如图所示。当 动点M沿轨迹曲线运动时,动点M的弧坐标s将随时间t而变化,是时 间t的单值连续函数,即