共轭凸轮的建立
共轭凸轮设计步骤

共轭凸轮设计步骤嘿,咱今儿就来讲讲共轭凸轮设计步骤这档子事儿!你想啊,这共轭凸轮就好比是一对默契十足的好搭档。
要设计好它们,那可得一步一步来,可不能马虎哟!首先呢,咱得搞清楚要干啥,也就是明确设计要求。
这就好像你要去旅行,得先知道自己想去哪儿,是看山还是看海,对吧?这要求不清楚,后面的步骤不就都瞎忙活啦!然后呢,开始选择合适的凸轮类型。
这就像是给咱的“好搭档”选个合适的角色,是勇猛的战士呢,还是机灵的谋士呢。
不同的凸轮类型,那可有不同的特点和用处呢!接下来,得仔细计算凸轮的轮廓曲线啦。
这可真是个精细活儿,就跟雕刻大师精心雕琢一件艺术品似的。
每一个线条,每一个弧度,都得恰到好处,不然这“搭档”可就配合不好咯!再之后呢,要考虑凸轮的运动规律。
这就像是给“好搭档”制定行动准则,啥时候快,啥时候慢,都得安排得明明白白。
还有啊,材料的选择也很重要呢!就跟给人挑衣服似的,得选合适的材质,既要耐用,又要能发挥出最佳性能。
在设计的过程中,可别忘了多检查检查,就跟咱出门前得照照镜子,看看有没有啥不妥的地方。
万一有个小差错,那可就麻烦啦!设计共轭凸轮可不是一件容易的事儿啊,但只要咱一步一步稳稳地走,用心去做,肯定能设计出完美的“好搭档”!你想想,当你看着自己精心设计的共轭凸轮完美地运转起来,那得多有成就感呀!就好像看着自己培养的花朵终于绽放出绚丽的色彩。
所以呀,别小瞧了这共轭凸轮设计步骤,每一步都得认真对待,马虎不得哟!这可是一门技术活,也是一门艺术呢!咱可得好好钻研,让这些“好搭档”为我们的各种机器发挥出最大的作用!你说是不是这个理儿呢?。
平面共轭分度凸轮机构设计计算和运动分析

% 共轭分度凸轮机构设计与分析% 相关的函数文件:% 计算凸轮机构运动参数(zhbx_cs.m)% 绘制凸轮机构运动曲线(zhbx_tx.m)% 计算凸轮廓线坐标(zhbx_xyRP.m)% 将凸轮廓线辅坐标转化为动坐标(zhbx_xyRPd.m)disp ' 用键盘输入已知条件:'n=input('凸轮转速(r/min) n = ');C=input('机构中心距(mm) C = ');disp '选择凸轮头数H、转盘分度数I与凸轮分度期转角theta_f的对应关系:'disp ' H=1时,I=6、8、10、12、16,theta_f=60、75、90、120、150度'disp ' H=2时,I=3、4、5、6、8,theta_f=90、120、150、180、210、240、270度' disp ' H=3时,I=2、4,theta_f=150、180、210、240、270度'disp ' H=4时,I=1、2、3,theta_f=180、210、240、270度'H=input('凸轮头数H = ');I=input('转盘分度数I = ');theta_f=input('凸轮分度期转角(度) theta_f = ');% 1-共轭分度凸轮机构运动分析% 凸轮角速度omega_1=pi*n/30;% 转盘滚子数z=H*I;% 凸轮停歇期转角if H<2theta_d=180-theta_f;elsetheta_d=360-theta_f;end% 转盘分度期转位角phi_f=360/I;% 机构分度期时间t_f和停歇期时间t_dhd=pi/180.0; % 角度转换为弧度的系数t_f=theta_f*hd/omega_1;t_d=theta_d*hd/omega_1;% 机构动停比k和运动系数tauk=t_f/t_d;tau=t_f/(t_f+t_d);disp '======== 共轭分度凸轮机构基本数据========'fprintf(' 凸轮转速n = %3.4f r/min \n',n)fprintf(' 机构中心距 C = %3.4f mm \n',C)fprintf(' 凸轮头数H = %3.0f \n',H)fprintf(' 转盘分度数I = %3.0f \n',I)fprintf(' 转盘滚子数z = %3.0f \n',z)fprintf(' 凸轮角速度omega_1 = %3.4f 1/s \n',omega_1)fprintf(' 凸轮分度期转角theta_f = %3.4f 度\n',theta_f)fprintf(' 凸轮停歇期转角theta_d = %3.4f 度\n',theta_d)fprintf(' 转盘分度期转角phi_f = %3.4f 度\n',phi_f)fprintf(' 机构分度期时间t_f = %3.4f s \n',t_f)fprintf(' 机构停歇期时间t_d = %3.4f s \n',t_d)fprintf(' 机构动停比k = %3.4f \n',k)fprintf(' 机构运动系数tau = %3.4f \n',tau)计算结果:======== 共轭分度凸轮机构基本数据========凸轮转速n = 100.0000 r/min机构中心距 C = 100.0000 mm凸轮头数H = 2转盘分度数I = 4转盘滚子数z = 8凸轮角速度omega_1 = 10.4720 1/s凸轮分度期转角theta_f = 180.0000 度凸轮停歇期转角theta_d = 180.0000 度转盘分度期转角phi_f = 90.0000 度机构分度期时间t_f = 0.3000 s机构停歇期时间t_d = 0.3000 s机构动停比k = 1.0000机构运动系数tau = 0.5000% 计算凸轮机构运动参数(调用组合摆线运动M文件:zhbx_cs.m)bc=0.5; % bc是转角分度单位[zhbx,i_zhbx]=zhbx_cs(theta_f,phi_f,hd,omega_1,bc);fprintf(' 组合摆线运动参数数组行数i_zhbx = %3.0f \n',i_zhbx)% 输出共轭分度凸轮机构运动参数[' 凸轮转角',' 转盘角位移',' 角速度',' 角加速度',' 跃度',' 角速度比',' 角加速度比'][zhbx(:,1),zhbx(:,2)/hd,zhbx(:,3),zhbx(:,4),zhbx(:,5),zhbx(:,6),zhbx(:,7)]计算结果:凸轮转角转盘角位移角速度角加速度跃度角速度比角加速度比0 0 0 0 3.5192 0 030.0000 3.8787 0.3345 0.8664 -0.6111 0.0319 0.007960.0000 20.1752 0.7254 0.5655 -2.6959 0.0693 0.005290.0000 45.0000 0.8798 0.0000 -3.5192 0.0840 0.0000120.0000 69.8248 0.7254 -0.5655 -2.6959 0.0693 -0.0052150.0000 86.1213 0.3345 -0.8664 -0.6111 0.0319 -0.0079180.0000 90.0000 0 -0.0000 3.5192 0 -0.0000% 绘制凸轮机构运动曲线(调用组合摆线绘图M文件:zhbx_tx.m)zhbx_tx(zhbx,hd,theta_f)% 备注:绘制的凸轮机构运动曲线形态正常(见图12-9)。
基于Autodesk Inventor的共轭凸轮设计与运动仿真
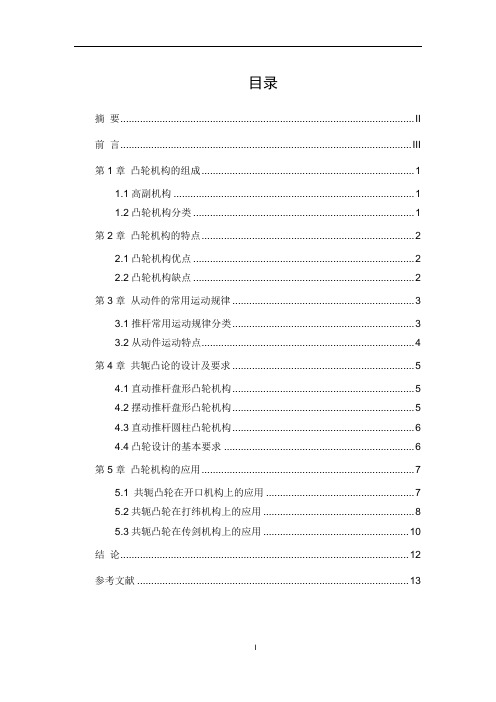
基于Autodesk Inventor的共轭凸轮设计与运动仿真笔者结合工作中的实际案例——一位使用Inventor产品多年的印刷机械设备用户,困惑于如何借助3D软件提升设计能力——分析其设计难题,例如比较普遍的凸轮设计问题,其中一个共轭凸轮的机构设计尤为难以实现。
本文就是基于解决用户共轭凸轮设计难题的真实案例,介绍了借助Autodesk Inventor设计共轭凸轮的方法及思路。
一、设计要求用户设计某胶订机,其中一台设备使用到一对共轭凸轮,其中一个凸轮是顶升凸轮,带动机构在垂直方向运动,另一个凸轮带动一个连杆机构,连杆机构的末端带动一个滑块做水平运动,机构简图如图1。
T形结构FF’E中,端点E与凸轮1的从动件连结,连杆AB的端点A 连接在滑块上,沿FF’平面做水平往复运动,连杆BCD绕C点转动,D点与凸轮2从动件连结,凸轮1和凸轮2绕同一根轴旋转。
1.凸轮1(垂直运动)盘式顶升凸轮(沟槽)做垂直方向往复运动。
凸轮基圆半径为50mm,凸轮升程为30mm,带动T形结构做垂直方向运动,其在一个周期内的运动规律如表所示。
2.凸轮2(水平运动)凸轮驱动连杆机构运动,连杆机构的末端连结到一个滑块,滑块的设计要求为一个往复行程为400mm,为配合机构的运动要求,其速度按照如图2所示规律运动。
本文重点在于说明设计的思路,对于机构的具体尺寸以及系统转速等不做说明,上述的设计参数也仅作示意,不代表实际设计数值。
二、设计分析常见的凸轮形式,包括线性凸轮、盘式凸轮及圆柱凸轮三大类,很多CAD软件没有直接提供凸轮设计工具,需要用户去创建凸轮的轮廓线(通过创建公式曲线,以数据点拟合样条曲线),而轮廓的几何外形仅仅表达了凸轮的位移变化,还无法满足对凸轮性能分析的需求(速度曲线、加速度曲线和压力角变化等)的分析,造成用户设计效率低下,凸轮优化困难。
Inventor凸轮设计模块集凸轮设计、计算校验于一身,支持上述三种凸轮,其自带了多达13种拟合函数,最高支持七阶多项式,无需用户推导解析函数,即能生成高质量的凸轮轮廓。
共轭凸轮的设计.
6)编制该产品的工艺过程卡片,及相应工装设计。
第
5.1共轭凸轮在开口机构上的应用
瑞士苏尔泽(Sulzer)片梭织机的开口机构就是采用共轭凸轮开口机构,其机构示意图如下图5.1所示:
图5.1凸轮机构示意图
其作用原理为:当凸轮轴按矢示方向回转,副凸轮2ˊ´推动转子3ˊ,使转子支座绕支座中心逆时针方向转过一定角度,通过连杆5、双臂杆6、推拉杆7、三角杆8及8ˊ、传递杆9及9ˊ和竖杆10、10ˊ,使综框11下降。当凸轮轴继续回转,主凸轮2推动转子3,使转子支座绕支座中心顺时针方向转过一定角度,通过连杆作用,使综框上升。
4.4凸轮设计的基本要求
1)了解凸轮机构的类型及各类凸轮机构的特点和应用场合,能根据工作要求和使用场合选择凸轮机构的类型。
2)熟悉该共轭凸轮所应于设备上所起的功能和性能,以及使用工作条件(例载荷性质等)。
3)熟练掌握凸轮轮廓曲线的设计原理与方法。绘制该共轭凸轮的升程曲线图,并分析其特点。
4)了解凸轮机构承载能力计算和结构设计的基本问题,初步具有建立凸轮机构计算机辅助设计和优化设计模型的能力。
所谓推杆的运动规律是指推杆在运动时,其位移s、速度v和加速度a随时间t变化的规律。又因凸轮一般为等速运动,即其转角δ与时间t成正比,所以推杆的运动规律更常表示为推杆的运动参数随凸轮转角δ变化的规律。
3.1推杆常用运动规律分类
(1)多项式运动规律
推杆的多项式运动规律的一般表达式为
s = C0 + C1δ + C2δ2 + … + Cnδn
第1章凸轮机构的组成
1.1高副机构
凸轮机构通常由进口轴承原动件,从动件和机架组成,由于凸轮与从动件组成的是高副,所以属于高副机构。
共轭凸轮机构结构参数的CAD设计

共轭凸轮机构结构参数的CAD设计李志章【摘要】在建立数学模型的基础上,定制了绘制摆动从动件共轭凸轮机构凸轮回转中心许用区域的AutoCAD命令,简化了织机共轭凸轮机构结构参数的设计,精确快捷,方便实用.【期刊名称】《丝绸》【年(卷),期】2004(000)010【总页数】2页(P28-29)【关键词】共轭凸轮;结构参数;计算机辅助设计【作者】李志章【作者单位】苏州经贸职业技术学院,江苏,苏州,215021【正文语种】中文【中图分类】工业技术2004 牢! 1~~ ~ _!血旦一一一一一一一一一一一一一一一一一_ _Be.sear 共辄凸轮机向结何参数的 CAD 设计李志章(苏州’|经贸职业技术学院,江苏苏州 215021 〕摘要:在建立数学模型的基础上,定制了绘制摆z;IJ从动件共辄凸轮机构凸轮回转中心许用区域的 AutoCAD 命令,简化了织机共领凸轮机构结构参数的设计,精确快捷,方便实用.关键词:共领凸轮:结构参数:计算机辅助设计中图分类号: THL12.2 文献标i只码: A文章编号: 1001 一 7003 (2004 )LO- 0028- 02 Design for Structural Parameters of Conjugate Cam inLoom with CAD LIZhi- zhang(SuzhouInstituteofTrade& ConUTierce,Suzhou215021,China) Abstract : BasedonthebuildingoftheI『1athematical model, theAutoCADcommandforpaintingthearearotatingcenterpermittingoftheswi ngfollowerconjugatecamismade,whichsimplifiesthestructuralparametersde signofthecaminloomandisaccurate,quick,convenientlyandpractical.Key words : conjugate 占a『n: structuralparameters;CAD共辄凸轮因振动冲击小、运动精度高在新型织机中应用较多,但由于在使用过程中往往承受了较大的工艺负荷,为减少磨损,常根据其许用压力角来确定凸轮的回转中心,进而确定机构的结构参数。
共轭凸轮在织机上的应用

共轭凸轮在织机上的应用2007年第6期(总第103期)【摘要】本文阐述共轭凸轮在织机开口机构、打纬机构、传剑机构上的应用所达到的良好工艺效果。
【关键词】共轭凸轮;织机;应用前言自瑞士苏尔泽(Sulzer)公司把共轭凸轮专利技术应用于织机开始,共轭凸轮机构已在织机的几大机构上得到了应用。
共轭凸轮也称复式凸轮,由主、副凸轮合为一体构成一对共轭凸轮。
只要是往复式的运动均可以采用共轭凸轮来传动,如综框的上下运动、筘座的前后摆动,剑杆的往复运动等。
它具有传动稳定可靠,运动准确,运动规律属于积极性质,运动方程可按工艺要求设计,满足各类工艺要求,达到最理想的工艺效果。
1 共轭凸轮在开口机构上的应用瑞士苏尔泽(Sulzer)片梭织机的开口机构就是采用共轭凸轮开口机构,其机构示意图如下:其作用原理为:当凸轮轴按矢示方向回转,副凸轮2ˊ´推动转子3ˊ,使转子支座绕支座中心逆时针方向转过一定角度,通过连杆5、双臂杆6、推拉杆7、三角杆8及8ˊ、传递杆9及9ˊ和竖杆10、10ˊ,使综框11下降。
当凸轮轴继续回转,主凸轮2推动转子3,使转子支座绕支座中心顺时针方向转过一定角度,通过连杆作用,使综框上升。
综框的上升和下降由主、副凸轮分别控制,但主、副凸轮应满足共轭要求:当主凸轮主动推动转子时,副凸轮应与另一转子保持接触;反之,也是。
确保凸轮与转子间不发生撞击。
共轭凸轮的传动,使综框的上升运动和下降运动均属积极运动,且由于取消了吊综带或吊综弹簧等挠性连接部件,综框的运动更加平稳可靠,综框的上升轨迹和下降轨迹可以根据凸轮的外廓弧线设计得更加合理,满足高速开口的要求。
在普通消极式凸轮开口机构上,综框的下降是由凸轮积极控制的,但开口机构要增加承受吊综弹簧的弹性变形,织机的能耗增大。
而综框的回升要依靠吊综弹簧的弹性势能,综框的回升效果受弹簧的初始变形量和弹性模量影响,因此综框的回升不稳定且弹簧要承受反复的拉伸变形,寿命较短,经常要调整、更换。
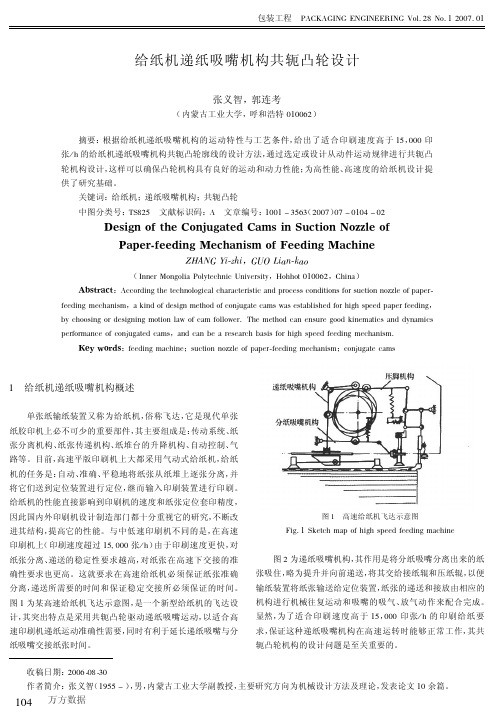
给纸机递纸吸嘴机构共轭凸轮设计
引证文献(4条) 1.张晓桂.高波 印刷机高速给纸实验装置的研制[期刊论文]-机械设计与制造 2010(2) 2.张晓桂.高波 印刷机高速给纸实验装置的设计[期刊论文]-包装工程 2008(10) 3.徐锋.徐坚.贺炜 基于B样条曲线的充氮加塞包装机凸轮曲线设计[期刊论文]-包装工程 2010(21) 4.王芳 新型胶印机递纸吸嘴机构动态性能分析[期刊论文]-西安工业大学学报 2010(4)
图 =" 主副凸轮轮廓曲线
[ ( ) 4 ;9 ( ) ? @ ( ) ] ! $ " " " =< 4 @< ( ? =< ( ) ] $ : #) # # [ ( #) ! $ " " " @< ? ;!< ( 4 ;A< ( % : #) #) ] # [ ( #)
! : !! ;<
! !
#$%& = I+,*+(3 .$,/ +0 )+,J(%2*/5 )268 由共轭凸轮设计结果知, 主凸轮的最大压力角小于 =9D , (;) 说明所求得凸轮轮廓线满足滚子摆动凸轮的受力状况要求, 具 有良好的动力性能。
图 !" 递纸吸嘴机构简图
: @9 * , 凸轮实际轮廓线许用曲率半径 [ ’]: =66 。 根据共轭凸轮廓线计算公式, 采用 G2*.2H 语言编程求解 出递纸吸嘴机构中共轭凸轮的轮廓曲线, 见图 = 。
#$%& ! ’()*$+, ,+--./ +0 121/3 4 0//5$,% 6/)72,$86
参考文献(6条) 1.沈韶华 共轭凸轮机构的计算机辅助设计[期刊论文]-包装工程 2005(01) 2.张晓玲 下摆式递纸机构共轭凸轮的设计与研究[期刊论文]-机械设计 2004(05) 3.剑杆织机共轭凸轮打纬机构的计算机辅助设计[期刊论文]-机械设计与研究 2002(04) 4.张春林 打纬共轭凸轮机构的设计[期刊论文]-北京理工大学学报 2000(01) 5.谢普南 印刷设备 2003 6.石永刚.徐振华 凸轮机构设计 1995
基于Autodesk Inventor的共轭凸轮设计与运动仿真
基于Autodesk Inventor的共轭凸轮设计与运动仿真笔者结合工作中的实际案例——一位使用Inventor产品多年的印刷机械设备用户,困惑于如何借助3D软件提升设计能力——分析其设计难题,例如比较普遍的凸轮设计问题,其中一个共轭凸轮的机构设计尤为难以实现。
本文就是基于解决用户共轭凸轮设计难题的真实案例,介绍了借助Autodesk Inventor设计共轭凸轮的方法及思路。
一、设计要求用户设计某胶订机,其中一台设备使用到一对共轭凸轮,其中一个凸轮是顶升凸轮,带动机构在垂直方向运动,另一个凸轮带动一个连杆机构,连杆机构的末端带动一个滑块做水平运动,机构简图如图1。
T形结构FF’E中,端点E与凸轮1的从动件连结,连杆AB的端点A 连接在滑块上,沿FF’平面做水平往复运动,连杆BCD绕C点转动,D点与凸轮2从动件连结,凸轮1和凸轮2绕同一根轴旋转。
1.凸轮1(垂直运动)盘式顶升凸轮(沟槽)做垂直方向往复运动。
凸轮基圆半径为50mm,凸轮升程为30mm,带动T形结构做垂直方向运动,其在一个周期内的运动规律如表所示。
2.凸轮2(水平运动)凸轮驱动连杆机构运动,连杆机构的末端连结到一个滑块,滑块的设计要求为一个往复行程为400mm,为配合机构的运动要求,其速度按照如图2所示规律运动。
本文重点在于说明设计的思路,对于机构的具体尺寸以及系统转速等不做说明,上述的设计参数也仅作示意,不代表实际设计数值。
二、设计分析常见的凸轮形式,包括线性凸轮、盘式凸轮及圆柱凸轮三大类,很多CAD软件没有直接提供凸轮设计工具,需要用户去创建凸轮的轮廓线(通过创建公式曲线,以数据点拟合样条曲线),而轮廓的几何外形仅仅表达了凸轮的位移变化,还无法满足对凸轮性能分析的需求(速度曲线、加速度曲线和压力角变化等)的分析,造成用户设计效率低下,凸轮优化困难。
Inventor凸轮设计模块集凸轮设计、计算校验于一身,支持上述三种凸轮,其自带了多达13种拟合函数,最高支持七阶多项式,无需用户推导解析函数,即能生成高质量的凸轮轮廓。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
共轭凸轮使用手册
要求及规范:
一个单独的凸轮毛坯有两个路径:一个主路径和一个共轭
一个摆臂的长度是35mm, 和共轭臂的长度相等
共轭臂和主臂间距离135°
一个摆臂的长度是35mm, 和共轭臂的长度相等
凸轮毛坯直径必须至少为220mm,厚度45mm
凸轮毛坯在ANSI方形键槽会有一个50mm的孔,与普通角度即凸轮旋转角度0°是一致的
两个凸轮从动的直径都是19mm
每个路径都有10mm 厚,毛坯将会得到缓解当在凸轮旋转中心顺时针方向旋转时
0°-50°凸轮转动,凸轮臂角度为67.5°时停歇
50°-154°凸轮转动,凸轮臂角度从67.5°到92.5°间修改正弦。
154°-205°凸轮转动,凸轮臂角度从92.5°到42.5°间修改正弦。
205°-255°凸轮转动,凸轮臂角度从42.5°到67.5°间修改正弦。
255°-360°凸轮转动,凸轮臂角度为67.5°时停歇
注意:所有的凸轮臂角度都是常见的角度线,这条线位于凸轮中心和摆臂枢轴之间,在逆时针方向。
一般操作流程
添加并指定一个凸轮毛坯
添加并指定一个主凸轮路径
添加并指定的共轭凸轮路径
在CAD上创建模型
添加一个凸轮毛坯
通过单击添加新圆柱体到装配图标或选择插入>插入新圆柱体到装配菜单项来添加新圆柱体到空CamTrax环境中
通过改变凸轮毛坯名称来改变共轭凸轮名称,
如果需要将单位设为公制
更改毛坯直径为225,要大于成品毛坯的最大直径,为凸轮路径在CAD中拉伸切除提供足够的材料。
更改毛坯高度为45mm
更改孔直径为50mm。
在键槽属性中选择ANSI方形键槽
更改键槽角度为90°。
凸轮毛坯的平面截图
添加主路径
通过单击插入新路径或选择插入>插入新路径到主毛坯菜单项来添加路径到圆柱体。
凸轮路径性能:
更改路径名称为主路径
更改路径表面为顶部
更改路径类型为内部
通过在从动尺寸属性内输入19,或直接在从动公称尺寸属性内选择
19mm 来更改从动直径。
更改路径深度为12mm。
注意:尽管凸轮规格要求深度为10mm,但是
我们会将路径深度设置更深一些,避免当凸轮手动操作时厚度为零
的错误现象。
更改路径间隙为0mm
更改从动类型为摆动
更改凸轮臂长度为35mm
更改X枢轴为0mm
更改Y枢轴为110mm.
通过点击添加分割段到当前路径图标4次,添加4个分割段在现有的单个分割段里。
在凸轮路径段网格:
规格更改启动角度、终止角度、启动臂角度、终止臂角度和运动类
型。
设置翻转象限为True使凸轮臂移动到路径正确的一侧。
凸轮主路径截图(视图设置至顶部)
添加共轭路径
单击插入新路径或选择插入>插入新路径到主毛坯菜单项来添加第二个路径到凸轮。
更改路径名称为共轭路径
更改路径表面为底部
更改路径类型为内部
通过在从动尺寸属性内输入19,或直接在从动公称尺寸属性内选择
19mm 来更改从动直径。
更改路径深度为12mm
更改路径间隙为0mm
更改共轭主凸轮路径从属性里选择共轭凸轮101<主凸轮>
更改臂长度为35mm.
更改共轭从动角度为135°。
CAD已创建凸轮截图
手动添加雕刻后的主凸轮路径与共轭凸轮路径的CAD模型截图
简化版凸轮摆动从动设置截图(CAD)
--交流QQ群--
CamTrax64汉化群(182945602)
***
GearTeq汉化群(182945790)
SolidWorks 技术交流(133712153)
SolidWorks 机械3D化(133713690)
--下载及更新--
汉化版下载及更新地址:
/share/link?shareid=4292486867&uk=621663628
--问题反馈及建议--
邮箱:hua200905@
QQ空间:/991421914。