CAN总线系统的波形分析
250k波特率 can 波形
主题:250k波特率 can 波形解析内容:1. 250k波特率can波形简介250k波特率can波形是指控制器局域网(Controller Area Network,CAN)通信中的一种数据传输速率。
CAN总线是一种串行通信协议,常用于实时控制系统中的数据通信。
250k波特率是CAN总线中常见的一个速率,用于传输中等速率的数据。
2. CAN波形的基本结构CAN波形的基本结构包括了起始位、标识符、控制域、数据域、CRC 校验、以及结束位等部分。
其中,起始位和结束位用于标识一个数据帧的开始和结束;标识符用于表示数据帧的优先级和类型;控制域包含帧类型、数据长度等信息;数据域是实际传输的数据;CRC校验用于检验数据的正确性。
3. 250k波特率can波形的特点250k波特率can波形在波形上的特点是整体呈现出一种稳定、有规律的信号波形,信号的频率较高,数据传输速率较快。
波形上可以清晰地看到起始位、标识符、控制域、数据域、CRC校验和结束位的结构,每个部分都有固定的时序和电平变化。
4. 250k波特率can波形的解析方法在解析250k波特率can波形时,需要先对波形进行采样和分析。
可以通过专门的CAN波形分析仪器或者CAN总线调试工具来采集和观察波形。
通过对波形的起始位、标识符、控制域、数据域等部分进行分析,可以得到数据帧的各个参数和信息,从而进行数据的解析和处理。
5. 250k波特率can波形的应用领域250k波特率can波形广泛应用于汽车领域、工业控制等实时通信系统中。
汽车中的各种控制模块、传感器等设备间的数据通信,都可以采用CAN总线,并且常用的速率之一就是250k波特率。
在工业控制领域,CAN总线也被广泛应用于各类自动化设备的通信与控制上。
6. 总结250k波特率can波形作为CAN总线中的一种常见数据传输速率,在实时控制系统和通信系统中扮演着重要的角色。
对于工程师和技术人员来说,对250k波特率can波形的深入了解和分析,对于系统的设计、调试和维护都具有重要意义。
CAN总线详细讲解

(低速应用)。
– 如今CAN总线在自动化领域中作为现场总线普遍使用。 – 任何官方应用需要向 Bosch 支付费用。
CAN 总线系统-历史
现状:
由于CAN总线的特点,得到了Motorola,Intel,Philip,Siemence,NEC等公 司的支持,它广泛应用在离散控制领域,其应用范围目前已不仅局限于汽车行业, 已经在自动控制、航空航天、航海、过程工业、机械工业、纺织机械、农用机械、 机器人、数控机床、医疗器械及传感器等领域中得到了广泛应用。
CAN 总线-优点
各控制单元之间的所有信息都通过两根数据线进行交换—— CAN数据总线
通过该种数据传递形式,所有的信息,不管控制单元的多少和 信息容量的大小,都可以通过这两条数据线进行传递,能大规 模的减少系统的复杂性。
CAN 总线-优点
5 个控制器 10 个连接线
40-60 个控制器... 780-1000 个连接线
CAN-L =2.4V 电压差= 2.6V-2.4V =0.2V 逻辑“0”: CAN-H =3.5V
CAN-L =1.5V 电压差= 3.5V-1.5 =2.0V
37
CAN 总线组成-硬件(导线信号)
38
CAN 总线组成-硬件(导线信号)
差分传输抗干扰具有很强的能力
由于CAN-H线和CAN-L线是紧密 的放置在一起的,所以干扰脉冲 X就总是有规律地同时作用在两 条线上。
CANV
41
CAN 总线组成-硬件(导线信号)
奔驰CAN总线电压信号 4.65 0.65
CAN-H的高电平为:4.65伏 CAN-H的低电平为:2.6伏 CAN-L的高电平为: 2.4伏 CAN-L的低电平为:0.65伏 逻辑“1”:CAN-H =2.6V
can多节点通信波形异常原因

can多节点通信波形异常原因以can多节点通信波形异常原因为标题,我们来探讨一下其中可能的原因。
CAN(Controller Area Network)是一种常见的串行通信协议,广泛应用于汽车、工业控制等领域。
在CAN多节点通信中,波形异常可能导致通信失败或数据丢失,因此我们需要了解可能导致波形异常的原因,并采取相应的措施进行修复。
一、电缆故障电缆故障是导致CAN通信波形异常的常见原因之一。
电缆可能出现接触不良、断路或短路等问题,这会导致信号传输受阻或干扰,进而影响波形的正常传输。
解决这个问题的方法是检查电缆连接是否牢固,排除接触不良的情况,并使用质量可靠的电缆进行替换。
二、电磁干扰电磁干扰是CAN通信波形异常的另一个常见原因。
在工业环境中,存在大量的电磁干扰源,如电机、变频器、电弧焊等。
这些干扰源会导致CAN通信信号受到干扰,从而使波形不正常。
为了解决这个问题,可以采取一些措施,如增加屏蔽、使用抗干扰电缆、合理布线等,以减少电磁干扰对CAN通信的影响。
三、终端电阻问题在CAN通信中,终端电阻的设置对于波形的正常传输至关重要。
如果终端电阻设置不正确,就会导致波形异常。
通常情况下,CAN总线两端需要设置120欧姆的终端电阻。
如果终端电阻缺失或设置不正确,就会出现波形异常的情况。
因此,在进行CAN总线连接时,需要确保终端电阻的正确设置。
四、节点故障CAN通信中的节点故障也是导致波形异常的原因之一。
节点故障可能包括节点硬件故障、节点软件错误等。
硬件故障可能导致节点无法正常发送或接收数据,从而导致波形异常。
对于节点硬件故障,需要检查节点的硬件连接是否正常,排除硬件故障的可能性。
节点软件错误可能导致节点发送或接收的数据错误,从而影响波形的正确性。
解决这个问题的方法是对节点的软件进行调试和修复。
CAN多节点通信波形异常可能的原因包括电缆故障、电磁干扰、终端电阻问题和节点故障等。
针对这些问题,我们可以采取相应的措施进行修复,如检查电缆连接、增加屏蔽、使用抗干扰电缆、正确设置终端电阻和调试修复节点软件等。
奔驰S级轿车的CAN BUS系统的基础总结与分析

奔驰S级轿车的CAN BUS系统的基础总结与分析正确的CAN BUD 波形图首先,简单介绍一下什么是CAN总线,以及一些基本结构,CAN总线技术,一般我们称它为,控制器局域网。
简单来说,就是把车辆上面,控制单元,用总线连接在一起,互相通信。
共享每个控制单元锁采集的一些数据。
举个最简单的例子.奔驰S级,变速箱换挡,最基本参考是车速与发动机负荷(即驾驶员的需求,,油门踏板的踩下或者说节气门的开度反应了驾驶员得负荷请求)。
对于普通车辆,如果变速箱需要获得这两个信号,就必须直接从之后两个控制单元去采集信号,就比如最早的节气门系统,除了有信号线通到ME电脑,还有一根信号线肯定是通到变速箱电脑的。
所以这样没有总线的系统,会存在许多问题,例如,随着车辆电子集成度得提高,车辆内的布线会越来越多过多的线路,导致成本增加,并且过多的线路,也是会造成故障的易发性。
而且会阻止车辆的发展。
CAN总线技术就是在这种情况下研究出来的。
在说一下CAN总线的结构,一般情况下,CAN总线包括1—总线,汽车上面一般由双绞线组成,双绞线最大的作用是降低信号干扰的程度,每一根导线在传输中辐射的电波都会被另一根线上发出的电波抵消。
这样很利于CAN线的传播,并且有些CAN线可以运行单线模式,即使一条CAN线故障,整个CAN系统,还可运行。
同时,两条CAN线,一条有故障,另外一条还可以负责,确认故障。
2 CAN收发器(一般集成与控制单元呢,每个控制单元内,都有一个接收器,和一个发送器,用于在总线上,将自己需要的信息接收利用,同时将自己采集的信息,传递至CAN总线上,以便其他控制单元使用。
3—终端电阻,终端电阻作用为防止数据在终端被反射,并以回声的形式返回,数据在终端的反射会影响数据的传输。
在奔驰S级上面,终端电阻,有两种形式存在,一种位于CAN分配器中,一种位于某些控制单元内,(这个后面会具体介绍)4网关, 网关的主要功能是使连接在不同的数据总线上的控制单元能够交换数据。
can总线时序波形 -回复
can总线时序波形-回复什么是CAN总线时序波形?如何分析CAN总线时序波形?CAN总线时序波形分析的相关工具和技术有哪些?在实际应用中,如何优化CAN总线时序波形?一、什么是CAN总线时序波形?CAN(Controller Area Network)总线是一种传输控制协议,广泛应用于现代汽车和工业自动化等领域。
CAN总线时序波形(CAN bus timing waveform)是指在CAN总线上传输的数据信号的时序图,用于描述CAN 总线上不同信号的时间关系和数据传输的时序特性。
CAN总线采用差分通信方式,通过两根线(CAN_H和CAN_L)进行数据传输。
CAN总线时序波形主要包括以下几个重要信号:开始位(Start Bit)、数据位(Data Bits)、追加位(Stuff Bit)、帧间隔位(Inter-frame Space)等。
开始位是CAN总线上开始一帧数据传输的信号,标志着新的数据帧的开始。
数据位是CAN总线上实际承载数据的信号,其长度可以是1到8个字节(Byte)。
追加位主要用于错误检测和纠错,通过改变数据位之间的时间间隔来保证传输的可靠性。
帧间隔位用于标志两个数据帧之间的间隔。
二、如何分析CAN总线时序波形?分析CAN总线时序波形可以帮助我们理解数据传输的过程和特点,同时也可以用于故障排查和性能优化。
1. 下载一个CAN总线分析工具:首先,我们需要下载一个专门用于CAN 总线时序波形分析的软件工具。
常用的CAN总线分析工具有CANalyzer、CANoe和VectorSCOPE等。
这些工具可以用于捕捉、显示和分析CAN 总线上的时序波形。
2. 连接CAN总线到计算机:将CAN总线的H线和L线连接到计算机上的CAN总线接口或USB转CAN接口上。
3. 配置CAN总线分析工具:打开CAN总线分析工具,选择正确的设备和接口,配置波特率等参数。
波特率是指数据在CAN总线上传输的速率。
4. 捕捉CAN总线时序波形:在CAN总线分析工具上点击开始捕捉按钮,开始捕捉CAN总线上的时序波形。
CAN总线(三)---如何通过波形解析can总线数据-qtchen001

如何通过波形解析can总线数据这里的数据使用的是标准的can设备产生的can信号(扩展帧发送数据ID=0x11121181 Data=0x06 0x08)信号的波形如图1所示,这里示波器的探头接的是CAN_H,探头的夹子接的是CAN_L:图1 示波器显示波形首先根据本博客中前面写的一篇如何测量can总线波特率获取总线的波特率,然后依据波特率和上面的波形读出具体的数据从上面的波形中读取到的数据是10111011101100011110111001111101011111001111101001111100111101111011011101根据标准can2.0b协议可以讲该字符串解析出来,标准的扩展协议如图2所示图2 CAN扩展消息格式然后将数据根据格式划分成各个有意义的字段,如图3所示,这里我自己将高电平编码为1,低电平编码为0。
但是在can协议中,他将高电平定义为显性位,逻辑上定义为0,将低电平定义为隐形位,逻辑上定义为1,我们前面先不管这个。
图3 数据分割在can的协议中当连续出现5个高电平时就需要插入一个低电平,连续出现5个低电平时就需要插入一个高电平,所以在解析的过程中需要将这些插入的数据删除,就是图3中用红线删除的那些数据。
在删除这些数据之后根据图2的格式可以将各个字段分割出来解析信息:29位ID:0 1110 1110 1101 1110 1110 0111 1110,从右到左每4位一个字段,这里需要将其在转换回can协议定义的逻辑电平的形式---即将0变为1,将1变为0,这样便符合我们日常的编码习惯。
解析出来的ID=0x11121181,与我们发送的数据是相符合的。
DLC:1101 转换成十进制为2 表示这一帧中有两个数据,接下来的16个字节便表示2个数据D1:11111001 = 0x06D2:11110111 = 0x08这样便解析出了我们需要的数据,这是和我发送的数据一致的。
can总线波形检测实验心得

can总线波形检测实验心得
在进行CAN总线波形检测实验之前,我们首先需要了解CAN总线的基本原理和特性。
CAN总线是一种常见的工业控制网络,具有高速、可靠、抗干扰等特点。
在实际应用中,我们需要对CAN总线的波形进行检测,以验证其正常工作。
下面是我在进行CAN总线波形检测实验中的一些心得体会。
首先,我们需要准备一些基本的设备和工具,例如CAN总线分析仪、示波器、信号发生器等。
在进行波形检测之前,我们需要对这些设备进行正确的连接,以确保信号正常传输。
同时,我们需要对所使用的设备进行正确的配置,例如设置波特率、校验模式、帧格式等。
其次,在进行波形检测之前,我们需要先了解CAN总线的标准波形,以便于对波形进行比较和分析。
在实际检测过程中,我们需要观察CAN总线上的各种信号波形,例如起始边沿、同步边沿、数据帧等。
通过对这些波形的分析,我们可以判断CAN总线的工作状态是否正常。
最后,我们需要对检测结果进行分析和处理。
在实际应用中,我们需要对CAN总线上的各种异常情况进行诊断和处理,以确保系统的稳定运行。
例如,当出现误码率高、总线负载过大等情况时,我们需要及时采取相应的措施,以减少故障的发生。
总之,进行CAN总线波形检测实验是一个较为复杂的过程,需要我们具备一定的知识和技能。
通过不断地学习和实践,我们可以更好地掌握CAN总线的工作原理和波形检测技能,从而为工业控制系统的设计和维护提供更加可靠的保障。
浅析CAN数据总线常见故障的波形检测方法
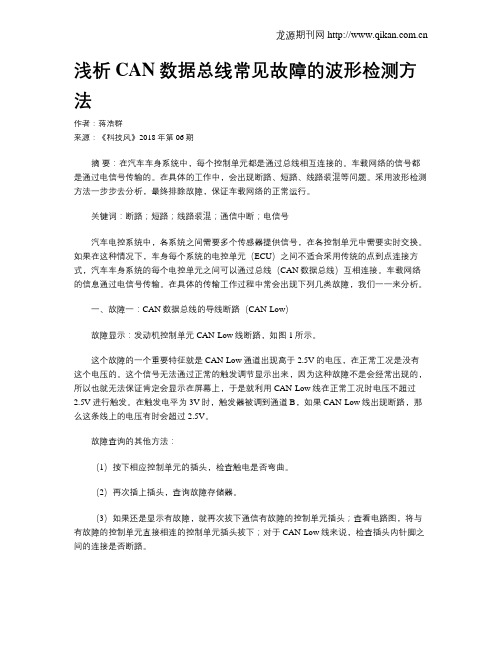
浅析CAN数据总线常见故障的波形检测方法作者:蒋浩群来源:《科技风》2018年第06期摘要:在汽车车身系统中,每个控制单元都是通过总线相互连接的。
车载网络的信号都是通过电信号传输的。
在具体的工作中,会出现断路、短路、线路装混等问题。
采用波形检测方法一步步去分析,最终排除故障,保证车载网络的正常运行。
关键词:断路;短路;线路装混;通信中断;电信号汽车电控系统中,各系统之间需要多个传感器提供信号,在各控制单元中需要实时交换。
如果在这种情况下,车身每个系统的电控单元(ECU)之间不适合采用传统的点到点连接方式,汽车车身系统的每个电控单元之间可以通过总线(CAN数据总线)互相连接。
车载网络的信息通过电信号传输。
在具体的传输工作过程中常会出现下列几类故障,我们一一来分析。
一、故障一:CAN数据总线的导线断路(CAN-Low)故障显示:发动机控制单元CAN-Low线断路,如图1所示。
这个故障的一个重要特征就是CAN-Low通道出现高于2.5V的电压,在正常工况是没有这个电压的。
这个信号无法通过正常的触发调节显示出来,因为这种故障不是会经常出现的,所以也就无法保证肯定会显示在屏幕上,于是就利用CAN-Low线在正常工况时电压不超过2.5V进行触发。
在触发电平为3V时,触发器被调到通道B,如果CAN-Low线出现断路,那么这条线上的电压有时会超过2.5V。
故障查询的其他方法:(1)按下相应控制单元的插头,检查触电是否弯曲。
(2)再次插上插头,查询故障存储器。
(3)如果还是显示有故障,就再次拔下通信有故障的控制单元插头;查看电路图,将与有故障的控制单元直接相连的控制单元插头拔下;对于CAN-Low线来说,检查插头内针脚之间的连接是否断路。
注意:如果CAN-High线断路,相应地就得先进行CAN-High线的检查。
这时DSO上的故障图像就向下翻转并在低于2.5V的区域触发器应调到通道A(1.7V)。
二、故障二:CAN-Low线对蓄电池短路故障描述:CAN-Low线的故障在于蓄电池电压,如图2所示。