最大功率跟踪控制方法及装置
最大功率跟踪的控制原理
最大功率跟踪的控制原理最大功率跟踪(MPPT)是并网发电中的一项重要的关键技术,它是指控制改变太阳电池阵列的输出电压或电流的方法使阵列始终工作在最大功率点上,根据太阳电池的特性,目前实现的跟踪方法主要有以下三种:(1)恒电压法,因为太阳电池在不同光照条件下的最大功率点的电压相差不大,近似为恒定。
这种方法的误差很大,但是容易实现,成本较低;(2)爬山法,通过周期性的不断的给太阳电池阵列的输出电压施加扰动,并观察其功率输出的改变,然后决定下一次扰动的方向。
这种方法的追踪速度较慢,只适合于光强变化较小的环境;(3)导纳微分法(又称增量电导法),认为太阳电池阵列的的最大功率点处,输出功率对输出电压的一阶倒数等于零。
因此在环境光强发生改变时,根据dI/dV的计算结果是否等于-I/V,决定是否继续调整输出电压,既可实现最大功率点的跟踪。
该方法相对于恒电压法和爬山法有高速稳定的跟踪特性。
上述三种方法各有特点,但是都不同时具有低成本、高稳定性、快速追踪的特性。
第一种方法只是粗略估计了最大功率点的位置,在光强变化到很大或较小时都会产生很大的误差。
后两种方法本质上都是通过判断当前工作点是否处于最大工作点来决定是否继续调整及调整的方向,因此最终的结果是逆变器始终工作在最大功率点的左右,来回振荡,而不是真正的工作在最大功率点处,反应在太阳电池阵列的输出上就是,太阳电池阵列的输出电压或电流总是以一个直流电平为中心上下跳跃,波形很不稳定,而且在光强变化速度较快时,不能及时反应。
三、太阳能电池功率追踪访法及算法扰动观察法是目前太阳能电池最大功率追踪技术中最为成熟以及被采用最多的方法,其系统方块图如图12所示。
由图中可以很明显的看出此法的硬件需求较少,模拟/数字转换器节省得相当多,因此在制造的成本上将大为降低。
扰动观察法之缺点在于最大功率追踪过程中,当大气条件迅速改变时,由于响应速度未能因应调整,会使追踪的速度变缓,造成功率的损失,不过此一缺点可以用软件技术来加以改善,赋予系统自我调整响应速度之功能,这也是本文的研究重点,亦即以软件算法来达到太阳能电池最大功率的追踪,并分析系统操作于较高频率下,其追踪的性能。
最大功率点跟踪方法
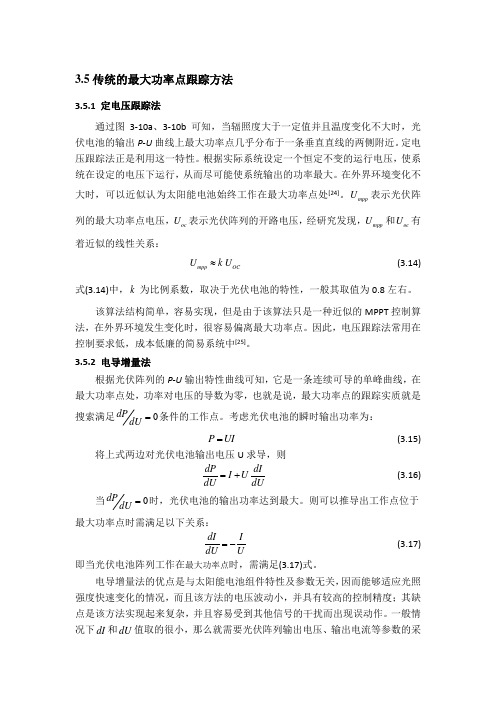
3.5传统的最大功率点跟踪方法3.5.1 定电压跟踪法通过图3-10a 、3-10b 可知,当辐照度大于一定值并且温度变化不大时,光伏电池的输出P -U 曲线上最大功率点几乎分布于一条垂直直线的两侧附近。
定电压跟踪法正是利用这一特性。
根据实际系统设定一个恒定不变的运行电压,使系统在设定的电压下运行,从而尽可能使系统输出的功率最大。
在外界环境变化不大时,可以近似认为太阳能电池始终工作在最大功率点处[24]。
mpp U 表示光伏阵列的最大功率点电压,oc U 表示光伏阵列的开路电压,经研究发现,mpp U 和oc U 有着近似的线性关系:mpp OC U k U ≈ (3.14)式(3.14)中,k 为比例系数,取决于光伏电池的特性,一般其取值为0.8左右。
该算法结构简单,容易实现,但是由于该算法只是一种近似的MPPT 控制算法,在外界环境发生变化时,很容易偏离最大功率点。
因此,电压跟踪法常用在控制要求低,成本低廉的简易系统中[25]。
3.5.2 电导增量法根据光伏阵列的P-U 输出特性曲线可知,它是一条连续可导的单峰曲线,在最大功率点处,功率对电压的导数为零,也就是说,最大功率点的跟踪实质就是搜索满足0dP dU =条件的工作点。
考虑光伏电池的瞬时输出功率为:P UI = (3.15)将上式两边对光伏电池输出电压U 求导,则dP dI I U dU dU=+ (3.16) 当0dP dU =时,光伏电池的输出功率达到最大。
则可以推导出工作点位于最大功率点时需满足以下关系:dI I dU U=- (3.17) 即当光伏电池阵列工作在最大功率点时,需满足(3.17)式。
电导增量法的优点是与太阳能电池组件特性及参数无关,因而能够适应光照强度快速变化的情况,而且该方法的电压波动小,并具有较高的控制精度;其缺点是该方法实现起来复杂,并且容易受到其他信号的干扰而出现误动作。
一般情况下dI 和dU 值取的很小,那么就需要光伏阵列输出电压、输出电流等参数的采样精度很高,而传感器的采样精度有限,所以必然会存在误差,另外,电导增量法存在振荡问题。
光伏发电系统中最大功率跟踪控制方法的研究共3篇

光伏发电系统中最大功率跟踪控制方法的研究共3篇光伏发电系统中最大功率跟踪控制方法的研究1光伏发电系统中最大功率跟踪控制方法的研究随着能源危机日益加剧,人们开始逐渐关注非化石能源的开发和利用。
光伏发电系统作为一种新兴的能源利用方式,具有环保、可持续发展等优点,并且在短时间内日益得到了快速发展。
然而,光伏发电系统本身存在着输出波动大、稳定性差等问题,最大功率跟踪控制成为了实现光伏发电系统的高效利用的重要控制手段。
最大功率跟踪控制方法是指在各种光照条件下,通过调节光伏电池阻抗,使得光伏电池输出功率达到最大。
该方法可保证光伏发电系统的最大工作效率,提高光伏发电系统的性能指标。
目前,在光伏发电系统最大功率跟踪控制方法中,较为常用的有基于传统控制方法的PID控制算法、基于传统控制方法的模糊控制算法以及基于人工智能的控制方法。
PID控制算法是目前工业应用最广泛的一种控制方法,其优点是简单易行、可靠性高。
但是,在光伏发电系统的最大功率跟踪控制中,PID控制算法的缺点也很明显,即对系统参数不确定和非线性时效应响应较差。
模糊控制算法是一种基于模糊逻辑的控制方法,具有较强的适应性和鲁棒性,能够在一定程度上解决光伏发电系统非线性和不确定性问题。
但是,模糊控制算法的不足之处也很明显,即控制逻辑复杂、难以优化、且受控精度较低。
人工智能控制方法是目前最受关注的一种控制方法,其通过模拟人类智慧的思维方式来完成系统控制。
在光伏发电系统最大功率跟踪控制中,人工智能控制方法能够很好地解决非线性和不确定性问题,并且具有很高的精度和操控性。
但是,人工智能控制方法的缺点也很明显,即需要耗费大量时间和成本来完成系统学习和训练,以及容易出现过拟合和欠拟合现象。
综上所述,最大功率跟踪控制是光伏发电系统高效利用的重要手段。
通过不同的控制方法,在解决非线性和不确定性问题的同时,还能够提高光伏发电系统的性能指标。
随着科技的不断发展,相信控制方法的研究也将不断更新,为光伏发电系统的发展贡献更多的力量在光伏发电系统的最大功率跟踪控制中,不同的智能控制方法具有各自的优缺点。
一种最大功率点追踪方法、太阳能控制器及相关设备[发明专利]
![一种最大功率点追踪方法、太阳能控制器及相关设备[发明专利]](https://img.taocdn.com/s3/m/b60e3649284ac850ac0242b4.png)
专利名称:一种最大功率点追踪方法、太阳能控制器及相关设备
专利类型:发明专利
发明人:姜亲宜,尤勇,吴建峰,李适如
申请号:CN201811550839.7
申请日:20181218
公开号:CN109343650A
公开日:
20190215
专利内容由知识产权出版社提供
摘要:本发明实施例提供了一种最大功率点追踪方法及太阳能控制器及相关设备,用于动态追踪太阳能电池板的最大功率点。
本发明实施例中,当确定太阳能电池板最大功率点对应的输出电压V之后,启动斐波那契数列追踪方法,以斐波那契数列中的中间项的取值作为扰动值进行扰动,根据扰动之后的功率变化趋势动态的调整下一次扰动的方向和扰动值的大小,通过引入斐波那契数列,利用斐波那契数列的收敛特性动态调整上一次的最大功率点附近的电压的扰动步基,快速追踪最新的最大功率点,提高了在功率电压曲线动态变化过程中的最大功率点的追踪效率,提高太阳能的综合利用率。
申请人:深圳市英威腾光伏科技有限公司
地址:518055 广东省深圳市南山区桃源街道北环路猫头山高发工业区高发7号厂房5层504国籍:CN
代理机构:深圳市深佳知识产权代理事务所(普通合伙)
代理人:王仲凯
更多信息请下载全文后查看。
直驱式永磁同步风力发电机最大功率跟踪的基本控制方法

直驱式永磁同步风力发电机最大功率跟踪的基本控制方法一、最大风能捕获控制的基本原理风能作用在风轮上,风能只有一部分可以被风轮吸收。
风力机从风能中捕获的功率Pw可表示为式中Pw——风力机从风能中捕获的风功率;ρ——空气密度;A——风力机扫风面积;v——风速;C p ——风力机的风能利用系数。
在桨距角一定的情况下,Cp是叶尖速比λ的函数,λ为式中ωw——风力机机械角速度;Rtur——风轮半径;v——风速。
在实际应用中常用风能利用系数Cp对叶尖速比λ的变化曲线表示该风轮的空气动力特性,如图7-4和图7-5所示。
图7-4 风轮气动特性(Cp-λ)曲线图7-5 永磁同步发电机不同转速从短路状态到开路状态的全特性曲线时就可以获得最大风能利当桨距角一定时,风力机运行于最佳叶尖速比λopt,此时风力机的转换效率最高,即用系数Cpmax式中ω——风力机的最优机械角速度;optλ——最佳叶尖速比。
opt成比例调节,以保持λ总在最优。
上式要求风轮机组的转速ω可以随风速v1在直驱式永磁同步风力发电系统中,风力发电机与风力机直接相连,风力发电机组的动态特性可以用一个简单的数学模型描述为——风力发电机组的转动惯量;式中Jtur——风力机的气动转矩;TturT——风力发电机电磁转矩。
em为风力机气动转矩Ttur其中式中ρ——空气密度;β——桨距角;CT——风力机转矩系数;Cp——风能利用系数。
稳态时,当风力机运行在一个最佳叶尖速比λopt 时,有一个最佳功率系数Cpopt与之对应,且转矩系数CT =Cpopt/λopt=CTopt也为常数,此时捕获的风能为最大,为式中S——风轮扫风面积。
稳态时,当忽略摩擦阻力转矩,发电机的电磁转矩应该与风力机气动转矩相等,即式(7-7)是在稳态条件下推导出来的发电机电磁转矩与转速之间的关系,它可以作为用于控制电机转矩的给定值,是发电机转速的函数。
即当风速在额定风速以下时,发电机的电磁转矩按照式(7-12)的关系控制,整个系统就能够实现最大风能的捕获,这就是额定风速以下最大风能捕获的基本原理。
风力发电机组控制系统设计-—最大功率点跟踪控制

课程设计说明书风力发电机组控制系统设计-最大功率点跟踪控制专业新能源科学与工程学生姓名喻绸绢班级能源121学号1210604122指导教师薛迎成完成日期2015年12月14日目录1。
控制功能设计要求 01.1任务 02。
设计 (2)2。
1 介绍对象(风力发电系统的最大功率点跟踪控制技术研究)2 2。
2控制系统方案 (2)2.2.1风力机最大功率点跟踪原理 (2)2.2.2风力机发电系统 (5)2。
2。
3风速变化时的系统跟踪过程 (10)3。
硬件设计 (12)4。
软件设计 (15)5.仿真或调试 (16)参考文献 (18)1.控制功能设计要求1.1任务能源与环境是当今人类生存和发展所要解决的紧迫问题而传统能源已被过度消耗,因此,可再生能源的开发利用越来越受到重视和关注,其中风能具有分布广、储量大、利用方便、无污染等优点是最具大规模开发利用前景的新能源之一。
目前,变速恒频风力发电系统已经广泛用于实际风机中,在低于额定风速的情况下根据风速变化的情况调节风机转速,使其运行于最优功率点,从而捕获最大风能;在高于额定风速时,通过对桨距角的调节,使风机以额定功率输出。
常用最大功率捕获方法主要有功率反馈法、模糊控制法、混合控制法等。
为了充分利用风能,提高风电机组的发电总量,本文分析风机特性及最大功率点跟踪(maximum pow er point tracking MPPT)工作原理。
众多的MPPT实现方法各有千秋,对于不同的应用场所各有所长,对于多种方案,需要进行大量细致的实验工作和数据分析。
风能是一种具有随机性、不稳定性特征的能源,风能的获取不仅与风力发电机的机械特性有关,还与其采用的控制方法有关。
在某一风机转速情况下,风速越大时风力机的输出功率越大,而对某一风速而言,总有一最大功率点存在。
只有当风力发电机工作在最佳叶尖速比时,才能输出最大功率.好的控制方法可使风轮的转速迅速跟踪风速变化,使风力发电机始终保持在最佳叶尖速比上运行,从而最大限度地获得风能.要保证最大限度地将捕获到的风能转化为电能,目前一般采用最大功率点追踪控制(MPPT)控制策略。
第五章:最大功率点跟踪控制讲解
最大功率点跟踪(MPPT)maximum power point tracking
图1 输出功率曲线与负载 在光伏发电系统中,当光照强
在一定的光照强度和环境温度下, 电阻不同时,光伏电池可以有不 同的输出电压。但是只有在某一输 出电压值时,光伏阵列的输出功率才能达
到最大值,这时光伏阵列的工作点就达到了
图4-A中五条曲线的MPP趋势与图3-A中的MPP趋势相反;这是由于图 4-A的实测条件下,随着光照增强同时温度也在增加,使得PV组件的 开路电压UOC随温度升高而降低所致。
恒电压控制的原理详述
当忽略温度效应时,硅 型光伏阵列的输出特性
光伏阵列在不同光照强度 下的最大功率输出点 a‘,b’,c‘,d’和e‘总 是近似在某一个恒定的电 压值附近。
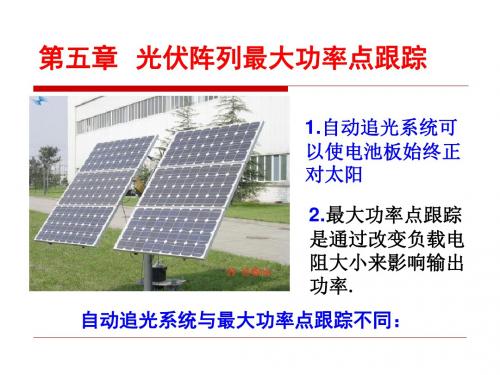
第五章 光伏阵列最大功率点跟踪
1.自动追光系统可 以使电池板始终正 对太阳
2.最大功率点跟踪 是通过改变负载电 阻大小来影响输出 功率. 自动追光系统与最大功率点跟踪不同:
不同照度下和不同温度下光伏阵列的伏安特性曲线
太阳能电池板伏安特性曲线
光伏阵列输出特性具有非线性特征,并且其输出受 环境(主要包括日照强度,温度)和负载情况影响。
CVT方法的应用前景
采用CVT代替MPPT控制,由于其良好的 可靠性和稳定性,目前在光伏系统中仍被较 多使用。随着光伏发电系统中数字信号处理 技术的应用,CVT方法逐渐被新方法取代。
5.2.最大功率点跟踪控制
5.4 现代最大功率点跟踪方法
与上页论述差不多,可作 为参考
在接入光伏发电系统之后,由 汇编语言的控制,对电路实行 最大功率跟踪控制。设定一定 得占空比,测量目前功率p0, 并加入扰动产生电流电压变化, 利用电压电流传感器测得此时 的u1,i1,并计算出p1=u1*i1。 对p0,p1,进行比较,若p1大 于p0,则说明扰动是让系统向 其最大功率输出方向变动,则 继续这种扰动,反之,则改变 扰动方式,通过MPPT控制,送 出这时的控制信号,再对比这 次扰动前后的功率值,循环进 行下去,直至系统功率值在某 一点左右变化为止。
最大功率跟踪的控制原理

最大功率跟踪(MPPT)是并网发电中的一项重要的关键技术,它是指控制改变太阳电池阵列的输出电压或电流的方法使阵列始终工作在最大功率点上,根据太阳电池的特性,目前实现的跟踪方法主要有以下三种:(1)恒电压法,因为太阳电池在不同光照条件下的最大功率点的电压相差不大,近似为恒定。
这种方法的误差很大,但是容易实现,成本较低;(2)爬山法,通过周期性的不断的给太阳电池阵列的输出电压施加扰动,并观察其功率输出的改变,然后决定下一次扰动的方向。
这种方法的追踪速度较慢,只适合于光强变化较小的环境;(3)导纳微分法(又称增量电导法),认为太阳电池阵列的的最大功率点处,输出功率对输出电压的一阶倒数等于零。
因此在环境光强发生改变时,根据dI/dV的计算结果是否等于-I/V,决定是否继续调整输出电压,既可实现最大功率点的跟踪。
该方法相对于恒电压法和爬山法有高速稳定的跟踪特性。
上述三种方法各有特点,但是都不同时具有低成本、高稳定性、快速追踪的特性。
第一种方法只是粗略估计了最大功率点的位置,在光强变化到很大或较小时都会产生很大的误差。
后两种方法本质上都是通过判断当前工作点是否处于最大工作点来决定是否继续调整及调整的方向,因此最终的结果是逆变器始终工作在最大功率点的左右,来回振荡,而不是真正的工作在最大功率点处,反应在太阳电池阵列的输出上就是,太阳电池阵列的输出电压或电流总是以一个直流电平为中心上下跳跃,波形很不稳定,而且在光强变化速度较快时,不能及时反应。
三、太阳能电池功率追踪访法及算法扰动观察法是目前太阳能电池最大功率追踪技术中最为成熟以及被采用最多的方法,其系统方块图如图12所示。
由图中可以很明显的看出此法的硬件需求较少,模拟/数字转换器节省得相当多,因此在制造的成本上将大为降低。
扰动观察法之缺点在于最大功率追踪过程中,当大气条件迅速改变时,由于响应速度未能因应调整,会使追踪的速度变缓,造成功率的损失,不过此一缺点可以用软件技术来加以改善,赋予系统自我调整响应速度之功能,这也是本文的研究重点,亦即以软件算法来达到太阳能电池最大功率的追踪,并分析系统操作于较高频率下,其追踪的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
太阳能光伏发电的最大功率跟踪控制方法及装置
1本项目主要的研究内容
(1)光伏发电系统最大功率点跟踪算法研究:传统的MPPT控制算法各自都存在一些不足之处,为了改善最大功率点的跟踪效果,将各种传统MPPT方法综合起来使用,相互取长补短。
把固定参数法、扰动观察法和电导增量法相结合得到的复合MPPT算法。
对复合MPPT控制算法结合相关文献资料进行研究,利用MATLAB进行仿真,建立多种模型,比较仿真结果,关注模型的简单性和跟踪时间和效果,并把模型移植到硬件平台进行调试。
(2)搭建基于单片机的光伏发电系统最大功率点跟踪控制装置,实现光伏发电系统最大功率点跟踪和控制以及直流变换等功能,提高光伏阵列的输出功率。
光伏发电系统最大功率点跟踪控制装置示意图1所示。
图1 光伏发电系统最大功率点跟踪控制装置示意图
(3)光伏发电系统最大功率点跟踪控制装置通过电压电流检测电路采集到的模拟信号经A/D端口送入微控制器进行最大功率点跟踪算法分析计算后,微控制器通过驱动模块输出PWM(脉宽调制)脉冲控制信号调节DC/DC变换器中内部开关管的通断,实现对转换电路输出电压及电流的控制。
(4)光伏发电系统最大功率点跟踪控制装置中设计保护模块,可以对电路进行过压和过流保护,提高装置的安全可靠性。
1.2拟解决的关键问题:
(1)复合MPPT算法的简化和跟踪时效;
(2)复合MPPT算法在硬件产品的应用实现;
(3)光伏发电系统最大功率点跟踪控制装置的在复杂情况下的可靠性;
2.方案的设计与可行性分析
最大功率点跟踪控制原理:对于一个线性电路,当负载电阻和电源内阻相等时,电源输出功率最大。
虽然太阳能电池和DC/DC转换电路都是非线性的,但是在其工作点附近很小的范围内,可以将它们看作是线性电路。
因此,只要调节DC/DC转换电路的等效电阻,使之与太阳能电池的串联电阻始终等于负载电阻,就可以实现太阳能电池阵列的最大功率输出,也就实现了太阳能电池的最大功率跟踪。
若将太阳能电池通过变换器与负载连接,太阳能电池的工作点则由负载限定。
当负载不可以调节时,由下图可知,太阳能电池在A点的输出功率小于在最大功率点的输出功率。
通过调节输出电压,将负载电压调节到Ur处,使负载上的功率从A点移到B点。
而B点与太阳能电池的最大功率点在同一条等功率线上,因此太阳能电池此时有最大功率输出。
本文采用固定电压法的控制策略
固定电压法是利用太阳能光伏电池输出最大功率时工作电压与开路电压存在近似的比例关系这一特性进行控制的一种最大功率点跟踪控制方法。
图2所示为不同情况下最大功率点电压和开路电压的关系曲线。
由图2可知,最大功率点电压和开路电压的比例系数M。
约为0.76,并且在外界温度和条件发生变化时,这个比例系数的变化不大,图中的实测点和拟合直线,误差在10%以内。
图2 最大功率点电压与开路电压的关系示意图
本方案所采用的太阳能电池阵列额定输出电压在19V附近,而经过转换电路降压后的输出电压为14.5V,刚好可以供12V的蓄电池充电。
DC/DC转换电路是接在直流电源和负载之间,通过控制电压的方法将不可控的直流输入变为可控的直流输出的一种变换电路,它被广泛的应用于逆变系统、开关电源和用直流电动机驱动的设备中。
本文设计的太阳能控制器通过采用降压式DC/DC转换电路,将太阳能电池的不可控输出电压转换成可控的输出电压。
降压式DC/DC转换电路是输出电压低于输入电压的单管不隔离直流转换电路。
如图3所示,主电路由开关管Q、二极管D、电感L和电容C等构成。
图3 升降压式DC-DC转换电路
通过输出电压的关系式可以看出,在输入电压或负载变化,要保证输出电压保持稳定时,可以采用两种方案。
第一可以维持开关管的截止时间TOFF 不变,通过改变脉冲的频率f 来维持输出电压U0的稳定,这便是脉冲频率调制(PFM )控制方式DC-DC 变换器;第二可以保持脉冲的周期T 不变,通过改变开关管的导通时间TON ,即脉冲的占空比q ,以实现输出电压的稳定,这就是脉宽调制(PWM )控制方式DC-DC 变换器。
由于目前已经有各种型号的集成PWM 控制器,所以DC-DC 变换器普遍采用PWM 控制方式。
至于PWM 波将由A VR 系列单片机控制输出。
这种控制方法的优点是控制简单,稳定性和经济性比较好。
缺点是:当季节温差变化较大时,
Um 值也有较大的变化,常需根据季节变化对定电压控制的U m 值进行相应调整。
由于太阳能电池的伏安特性曲线dU /dI 在最大功率点左侧变化很大,负载电流的微小扰动都会使阵列电压有较大的波动,如果系统的电压调整响应速度不快,会造成直流母线欠压并引起系统保护,从而造成系统工作不稳定。
因此在恒电压控制的电压闭环控制时,要求系统有较快的响应速度。
3主要单元电路设计
1、DC-DC 降压变换器主回路设计
该升压电路结构选择图1所示的电路。
该变换电路设计主要是确定关键元件:输出滤波电容C 、电感L 、开关管VT 和二极管D 。
(1) 输出滤波电容的选择
假如输出滤波电容C 必须在VT 导通的T ON 期间供给全部负载电流,设在T ON 期间C 上的电压降≤△U 0,△U 0为要求的纹波电压。
则00U T I C ON ∆≥ ,又因为T U U U T I ON 0
0-=,所以 0
000)(U U f U U I C I ∆⋅⋅-≥,选择开关频率等于50KHz ,在本设计给定的条件及要求下,计算输出滤波电容的值为:10μF ,实际选择100μF/50V 的电容。
(2) 储能电感的选择
根据电路的工作波形,电感电流包括直流平均值和纹波分量两部分。
假若忽略电路的 内部损耗,则变换器的输出能量和变换器的输入能量相等,即00I U I U I I =,所以LV OFF
I I I T T I U U I I ===000,即从电源取出的平均电流也就是流入电感的平均电流。
电感电流的纹波分量是三角波,在T ON 期间,电流的增量为L
T U I ON I =∆+;在T OFF 期间,电流将下降,其减少量为L
T U U I OFF I )(0-=∆-;在稳态下,I I ∆-=∆+。
在选择△I 时,一般要求电感的峰值电流不大于其最大平均电流的20%,以免使电感饱和;同时流过电感中的电流最小值也应大于或等于零。
实际设计时,选择电感电流的增量
I ON I I L T U I 4.1≤=∆,所以020*******.1)(4.1)(4.1I U f U U U U f U I U U U U I T U L I I I
I I I ON I ⋅⋅-≥⋅⋅-≥≥,在开关频率选择50kHz 和给定的条件及要求下,计算电感量为42μH ,实际选择100μH/2A 的电感。
电感可以买成品也可自己绕制。
(3) 开关管的选择
开关管VT 在电路中承受的最大电压是U 0,考虑到输入电压波动和电感的反峰尖刺电 压的影响,所以开关管的最大电压应满足>1.1×1.2U 0。
实际在选定开关管时,管子的最大允许工作电压值还应留有充分的余地,一般选择(2~3)1.1×1.2U 0。
开关管的最大允许工作电流,一般选择(2~3)I I 。
开关管的选择,主要考虑开关管驱动电路要简单、开关频率要高、导通电阻要小等。
本设计选择N 沟道功率场效应管IRF3205,该器件的V DSM =55V , 导通电阻仅为8mΩ,I DM =110A ,完全满足设计要求。
(4) 续流二极管的选择
在电路中二极管最大反向电压为U 0,流过的电流是输入电流I I ,所以在选择二极管时, 管子的额定电压和额定电流都要留有充分大的余地。
另外选择续流二极管时还要求导通电阻要小,开关频率要高,一般要选用肖特基二极管和快恢复二极管。
本设计选用MBR10100CT ,其最大方向工作电压为100V ,最大正向工作电流为10A ,完全满足设计要求。
说明:循环充电时,充电器提供的最高电压应有限制,6V 电池的充电电压为7.2—7.5V ,12V 电池充电电压为14.4—15V ,充电最大电流不大于额定容量值的30%A (比如2A .H 的蓄电池最大充电电流不能大于2×0.3=0.6安培);以10小时充电率为宜(比如2A .H 的蓄电池以0.2安培为宜),若充电电流过大,则蓄电池易发热,造成极板脱落、断裂、短路以致造成爆炸、燃烧等事故。
4.硬件实现部分
本方案将重点放在最大功率控制器上,对于蓄电池的保护电路将采用现成的充放电控制器,而在太阳能阵列与充放电控制器之间连接上最大功率控制器。
图4 直流照明小系统最终完成的原理图如下:。