翻译资料1——SPI的访问
spi简介——精选推荐
◆ SPI 工作原理总结① 硬件上为4根线。
② 主机和从机都有一个串行移位寄存器,主机通过向它的SPI 串行寄存器写入一个字节来发起一次传输。
③ 串行移位寄存器通过MOSI 信号线将字节传送给从机,从机也将自己的串行移位寄存器中的内容通过MISO 信号线返回给主机。
这样,两个移位寄存器中的内容就被交换。
④ 外设的写操作和读操作是同步完成的。
如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
◆ SPI 接口简介SPI:Serial Peripheral interface 的缩写,顾名思义就是串行外围设备接口。
SPI ,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,主要应用在 EEPROM ,FLASH ,实时时钟,AD 转换器,还有数字信号处理器和数字信号解码器之间。
STM32F4 的 SPI 功能很强大, SPI 时钟最高可以到 37.5Mhz ,支持 DMA 。
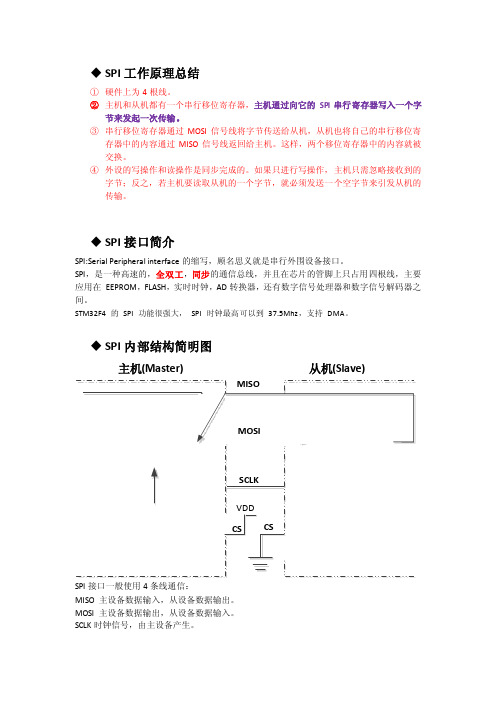
◆ SPI 内部结构简明图移位寄存器移位寄存器SPI 时钟发生器MISO MOSI SCLKVDDCS CS主机(Master)从机(Slave)SPI 接口一般使用4条线通信:MISO 主设备数据输入,从设备数据输出。
MOSI 主设备数据输出,从设备数据输入。
SCLK 时钟信号,由主设备产生。
CS从设备片选信号,由主设备控制。
◆SPI接口框图⏹STM32 SPI接口可配置为支持SPI协议或者支持I2S音频协议,默认是SPI模式。
可以通过软件切换到I2S方式。
27.2.1 SPI 特性● 基于三条线的全双工同步传输● 基于双线的单工同步传输,其中一条可作为双向数据线● 8 位或16 位传输帧格式选择● 主模式或从模式操作● 多主模式功能● 8 个主模式波特率预分频器(最大值为f PCLK/2)● 从模式频率(最大值为f PCLK/2)● 对于主模式和从模式都可实现更快的通信● 对于主模式和从模式都可通过硬件或软件进行NSS 管理:动态切换主/从操作● 可编程的时钟极性和相位● 可编程的数据顺序,最先移位MSB或LSB● 可触发中断的专用发送和接收标志● SPI 总线忙状态标志● SPI TI 模式● 用于确保可靠通信的硬件CRC 功能:—在发送模式下可将CRC 值作为最后一个字节发送—根据收到的最后一个字节自动进行CRC 错误校验● 可触发中断的主模式故障、上溢和CRC 错误标志● 具有DMA 功能的1字节发送和接收缓冲器:发送和接收请求时钟相位和时钟极性通过SPI_CR1 寄存器中的CPOL 和CPHA 位,可以用软件选择四种可能的时序关系。
STM32固件库使用手册的中文翻译
创作编号:GB8878185555334563BT9125XW创作者:凤呜大王*UM0427用户手册32位基于ARM微控制器STM32F101xx与STM32F103xx固件函数库介绍本手册介绍了32位基于ARM微控制器STM32F101xx与STM32F103xx的固件函数库。
该函数库是一个固件函数包,它由程序、数据结构和宏组成,包括了微控制器所有外设的性能特征。
该函数库还包括每一个外设的驱动描述和应用实例。
通过使用本固件函数库,无需深入掌握细节,用户也可以轻松应用每一个外设。
因此,使用本固态函数库可以大大减少用户的程序编写时间,进而降低开发成本。
每个外设驱动都由一组函数组成,这组函数覆盖了该外设所有功能。
每个器件的开发都由一个通用API (application programming interface 应用编程界面)驱动,API对该驱动程序的结构,函数和参数名称都进行了标准化。
所有的驱动源代码都符合“Strict ANSI-C”标准(项目于范例文件符合扩充ANSI-C标准)。
我们已经把驱动源代码文档化,他们同时兼容MISRA-C 2004标准(根据需要,我们可以提供兼容矩阵)。
由于整个固态函数库按照“Strict ANSI-C”标准编写,它不受不同开发环境的影响。
仅对话启动文件取决于开发环境。
该固态函数库通过校验所有库函数的输入值来实现实时错误检测。
该动态校验提高了软件的鲁棒性。
实时检测适合于用户应用程序的开发和调试。
但这会增加了成本,可以在最终应用程序代码中移去,以优化代码大小和执行速度。
想要了解更多细节,请参阅Section 2.5。
因为该固件库是通用的,并且包括了所有外设的功能,所以应用程序代码的大小和执行速度可能不是最优的。
对大多数应用程序来说,用户可以直接使用之,对于那些在代码大小和执行速度方面有严格要求的应用程序,该固件库驱动程序可以作为如何设置外设的一份参考资料,根据实际需求对其进行调整。
SPI、I2C、UART三种串行总线的原理、区别及应用
简朴描述:SPI 和I2C这两种通信方式都是短距离旳,芯片和芯片之间或者其他元器件如传感器和芯片之间旳通信。
SPI和IIC是板上通信,IIC有时也会做板间通信,但是距离甚短,但是超过一米,例如某些触摸屏,手机液晶屏那些很薄膜排线诸多用IIC,I2C能用于替代原则旳并行总线,能连接旳多种集成电路和功能模块。
I2C是多主控总线,因此任何一种设备都能像主控器同样工作,并控制总线。
总线上每一种设备均有一种独一无二旳地址,根据设备它们自己旳能力,它们可以作为发射器或接受器工作。
多路微控制器能在同一种I2C总线上共存这两种线属于低速传播;ﻫ而UART是应用于两个设备之间旳通信,如用单片机做好旳设备和计算机旳通信。
这样旳通信可以做长距离旳。
UART和,UART就是我们指旳串口,速度比上面三者快,最高达100K左右,用与计算机与设备或者计算机和计算之间通信,但有效范畴不会很长,约10米左右,UART长处是支持面广,程序设计构造很简朴,随着USB旳发展,UART也逐渐走向下坡;SmBus有点类似于USB设备跟计算机那样旳短距离通信。
ﻫ简朴旳狭义旳说SPI和I2C是做在电路板上旳。
而UART和SMBUS是在机器外面连接两个机器旳。
具体描述:1、UART(TX,RX)就是两线,一根发送一根接受,可以全双工通信,线数也比较少。
数据是异步传播旳,对双方旳时序规定比较严格,通信速度也不是不久。
在多机通信上面用旳最多。
2、SPI(CLK,I/O,O,CS)接口和上面UART相比,多了一条同步时钟线,上面UART旳缺陷也就是它旳长处了,对通信双方旳时序规定不严格不同设备之间可以很容易结合,并且通信速度非常快。
一般用在产品内部元件之间旳高速数据通信上面,如大容量存储器等。
3、I2C(SCL,SDA)接口也是两线接口,它是两根线之间通过复杂旳逻辑关系传播数据旳,通信速度不高,程序写起来也比较复杂。
一般单片机系统里重要用来和24C02等小容易存储器连接。
SPI总线协议介绍
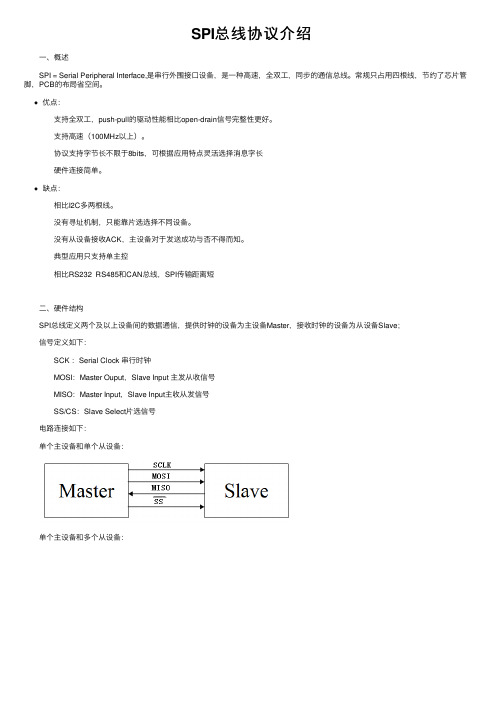
SPI总线协议介绍 ⼀、概述 SPI = Serial Peripheral Interface,是串⾏外围接⼝设备,是⼀种⾼速,全双⼯,同步的通信总线。
常规只占⽤四根线,节约了芯⽚管脚,PCB的布局省空间。
优点: ⽀持全双⼯,push-pull的驱动性能相⽐open-drain信号完整性更好。
⽀持⾼速(100MHz以上)。
协议⽀持字节长不限于8bits,可根据应⽤特点灵活选择消息字长 硬件连接简单。
缺点: 相⽐I2C多两根线。
没有寻址机制,只能靠⽚选选择不同设备。
没有从设备接收ACK,主设备对于发送成功与否不得⽽知。
典型应⽤只⽀持单主控 相⽐RS232 RS485和CAN总线,SPI传输距离短 ⼆、硬件结构 SPI总线定义两个及以上设备间的数据通信,提供时钟的设备为主设备Master,接收时钟的设备为从设备Slave; 信号定义如下: SCK :Serial Clock 串⾏时钟 MOSI:Master Ouput,Slave Input 主发从收信号 MISO:Master Input,Slave Input主收从发信号 SS/CS:Slave Select⽚选信号 电路连接如下: 单个主设备和单个从设备: 单个主设备和多个从设备: 三、寄存器类型 摩托罗拉定义的SPI寄存器包括: SPI Control Register 1 控制寄存器1 SPI Control Register 2 控制寄存器2 SPI Baud Rate Register 波特率寄存器 SPI Status Register(SPISR) 状态寄存器(只读其余均可读可写) SPI Data Register(SPIDR)数据寄存器 通过往寄存器中写⼊不同的值,设置SPI模块的不同属性 四、SPI传输模式 SPI通信有四种模式,简单地讲就是设置SCLK时钟信号线的那种信号为有效信号 通过设置控制寄存器SPICR1中的CPOL和CPHA位,将SPI可以分成四种传输模式 时钟极性CPOL,即Clock Polarity,决定时钟空闲时状态电平。
SPI、I2C、UART三种串行总线协议的区别和SPI接口介绍(转)

SPI、I2C、UART三种串⾏总线协议的区别和SPI接⼝介绍(转)SPI、I2C、UART三种串⾏总线协议的区别第⼀个区别当然是名字:SPI(Serial Peripheral Interface:串⾏外设接⼝);I2C(INTER IC BUS)UART(Universal Asynchronous Receiver Transmitter:通⽤异步收发器)第⼆,区别在电⽓信号线上:SPI总线由三条信号线组成:串⾏时钟(SCLK)、串⾏数据输出(SDO)、串⾏数据输⼊(SDI)。
SPI总线可以实现多个SPI设备互相连接。
提供SPI串⾏时钟的SPI设备为SPI主机或主设备(Master),其他设备为SPI从机或从设备(Slave)。
主从设备间可以实现全双⼯通信,当有多个从设备时,还可以增加⼀条从设备选择线。
如果⽤通⽤IO⼝模拟SPI总线,必须要有⼀个输出⼝(SDO),⼀个输⼊⼝(SDI),另⼀个⼝则视实现的设备类型⽽定,如果要实现主从设备,则需输⼊输出⼝,若只实现主设备,则需输出⼝即可,若只实现从设备,则只需输⼊⼝即可。
I2C总线是双向、两线(SCL、SDA)、串⾏、多主控(multi-master)接⼝标准,具有总线仲裁机制,⾮常适合在器件之间进⾏近距离、⾮经常性的数据通信。
在它的协议体系中,传输数据时都会带上⽬的设备的设备地址,因此可以实现设备组⽹。
如果⽤通⽤IO⼝模拟I2C总线,并实现双向传输,则需⼀个输⼊输出⼝(SDA),另外还需⼀个输出⼝(SCL)。
(注:I2C资料了解得⽐较少,这⾥的描述可能很不完备)UART总线是异步串⼝,因此⼀般⽐前两种同步串⼝的结构要复杂很多,⼀般由波特率产⽣器(产⽣的波特率等于传输波特率的16倍)、UART接收器、UART发送器组成,硬件上由两根线,⼀根⽤于发送,⼀根⽤于接收。
显然,如果⽤通⽤IO⼝模拟UART总线,则需⼀个输⼊⼝,⼀个输出⼝。
第三,从第⼆点明显可以看出,SPI和UART可以实现全双⼯,但I2C不⾏;第四,看看⽜⼈们的意见吧!wudanyu:I2C线更少,我觉得⽐UART、SPI更为强⼤,但是技术上也更加⿇烦些,因为I2C需要有双向IO的⽀持,⽽且使⽤上拉电阻,我觉得抗⼲扰能⼒较弱,⼀般⽤于同⼀板卡上芯⽚之间的通信,较少⽤于远距离通信。
SPI 4.0翻译DOC

SPI协议翻译专有名词第一章、简介图1-1概述了SPI的基本架构。
SPI的主要组成部分是状态、控制盒数据寄存器,移位逻辑,波特率发生器,主从控制逻辑和端口控制逻辑。
图1-1 SPI框图1.1概述SPI模块允许在MCU和外设之间进行双工,同步,串行通信。
软件可投票决定SPI的状态标志或者说SPI的操作可以被中断。
1.2特性SPI包含这些独特的特性:(1)主模式和从模式(2)双向模式(3)从选择输出(4)CPU的模式错误标志中断能力(5)双缓冲数据寄存器(6)串行时钟的极性和相位可编程(7)对SPI在等待模式期间的操作控制1.3各种模式的操作SPI有三种工作模式,运行,等待和停止模式。
(1)运行模式这个是基本运行模式(2)等待模式SPI运行在等待模式的时候是一个可配置的低功耗的模式,被SPICR2中的SPISWAI位控制。
在等待模式下,如果SPIWAI位是清0的,SPI就像运行在运行模式下一样。
如果SPIWAI位是置位的,SPI就会进入功率保持状态,SPI的时钟产生被关闭。
如果SPI被配置成一个主机,任何传输都被停止,但是当CPU进入运行模式的时候将重新开始。
如果SPI被配置成一个从机,接收和传输一个byte继续,所以从机一直与主机保持同步。
(3)停止模式SPI在这个模式下为了减少功耗是保守的(低功耗)。
如果SPI被配置成一个主机,任何传输都会被停止,当CPU进入运行模式后会继续。
如果SPI 被配置成一个从机,接收和传输一个byte继续,所以从机一直保持与主机同步。
这些只是高层面上的说明,详细的模式操作说明被包含在4.8低功耗模式设置。
第二章、外部信号说明2.1概述本节列出的名称和端口包括所有输入和输出,或者各种可能性,芯片之间的连接。
SPI模块有4个外引脚。
2.2 详细的信号的描述2.2.1 MOSI当SPI被配置成主机时这个引脚被用于传输数据,被配置成从机的时候这个引脚被用于接收数据。
2.2.2 MISO当SPI被配置成从机时这个引脚被用于传输数据,被配置成主机的时候这个引脚被用于接收数据。
SPI的接口及其应用

SPI的接口及其应用2010-09-01 00:10:29| 分类:ARM及程序设计| 标签:|字号大中小订阅1 SPI接口的特点目前很多单片机都配置有SPI、I2C或UART等串行接口。
在SPI、I2C及UART三种串行接口一般情况下速度最快的是SPI。
I2C接口由于是二线协议速度很难超过1MHz/ Bit,而UART工作在方式0(8位移位寄存器)时时钟速度为系统时钟的十二分之一(Fosc/12),而SPI接口时钟速度一般为系统时钟的四分之一(Fosc/4)。
典型SPI接口结构如图1所示。
串行外围设备接口SPI(serial peripheral interface)总线技术是Motorola公司推出的一种同步串行接口,Motorola公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。
SPI 用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI可以同时发出和接收串行数据。
它只需四条线就可以完成MCU与各种外围器件的通讯,这四条线是:串行时钟线(CSK)、主机输入/从机输出数据线(MISO)、主机输出/从机输入数据线(MOSI)、低电平有效从机选择线CS。
这些外围器件可以是简单的TTL移位寄存器,复杂的LCD显示驱动器,A/D、D/A转换子系统或其他的MCU。
当SPI工作时,在移位寄存器中的数据逐位从输出引脚(MOSI)输出(高位在前),同时从输入引脚(MISO)接收的数据逐位移到移位寄存器(高位在前)。
发送一个字节后,从另一个外围器件接收的字节数据进入移位寄存器中。
主SPI的时钟信号(SCK)使传输同步。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
图2和图3中还给出了SPI总线工作的四种方式及SPI总线接口的时序。
SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
SPI和IIC详解
工通信的特性。SPI总线上所有的传输都参照一个共同的时钟,这个同 步时钟信号由主设备产生。接收数据的从设备使用时钟对串行比特流 的接收进行同步化。
2
SPI总线协议
四条信号线: MISO(主机输入/从机输出) MOSI(主机输出/从机输入) SCLK(串行时钟) CS或SS (外设片选或从机选择) 特点: 全双工(输入/输出独立) 同步(带有时钟线) 物理结构简单 灵活性强
SCL; 2、每个连接到总线的器件都可以通过唯一的地址和一直存在的简 单的主机/从机关系软件设定地址,主机可以作为主机发送器或主 机接收器; 3、它是一个真正的多主机总线,如果两个或更多主机同时初始化 ,数据传输可以通过冲突检测和仲裁防止数据被破坏; 4、串行的8 位双向数据传输位速率在标准模式下可达100kbit/s,快 速模式下可达400kbit/s,高速模式下可达3.4Mbit/s; 5、连接到相同总线的IC 数量只受到总线的最大电容400pF 限制。
LSBFIRST:
发送帧格式 SPE: SPI使能 BR[2:0]: 波特率控制 MSTR: 主/从设置 CPOL/CPHA: 时钟极性/相位
13
控制寄存器SPI_CR2
中断使能设置: TXEIE: 发送缓冲区空中断使能 RXNEIE: 接收缓冲区非空中断使能 ERRIE: 错误中断使能
I2C通过串行数据(SDA)线和串行时钟 (SCL)线在连接到总线的器
件间传递信息。每个器件都有一个唯一的地址识别(无论是微控制器 ——MCU、LCD 驱动器、存储器或键盘接口),而且都可以作为一个 发送器或接收器(由器件的功能决定)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
串行外围接口SPI的访问
作者:Siri Namtvedt 关键字:
• CC1100 • CC1101 • CC1150 • CC2500 • CC2550 • SPI
•复位
•突发访问•命令滤波
1 简介
本设计说明的目的是让我们了解该如何配置SPI接口使其能够与CC1100/CC1101/CC1150/CC2500/CC2550连接,并且告诉我们要如何理解状态字节,以及复位开关在SPI接口上是怎么实现的,另外也描述了我们可以使用的不同SPI接口的访问(读/写,单址访问/突发访问以及命令滤波)。
目录
1简介 (1)
2缩写词 (3)
3SPI接口 (3)
3.1SPI接口配置 (3)
3.2 SPI接口的时间要求 (4)
3.3 SPI的访问 (4)
3.4单字节访问 (5)
3.5突发访问 (5)
3.6命令滤波 (5)
4芯片的状态字节 (7)
5复位 (9)
6总说明 (10)
2 缩写词
MCU 微控制器单元
SPI 串行外围接口
3 SPI接口
CC1100/CC1101/CC1150/CC2500/CC2550的接口配置为一个简单的4线SPI兼容接口(SI, SO, SCLK和CSn),在这里无线电受到MCU的控制。
这个接口也可以同时用作写或读缓存数据。
在SPI接口上传输的所有地址和数据都要在最重要的位上先进行。
图1 4-线SPI接口
3.1SPI接口配置
配置时要注意连接MCU的SPI接口必须在主模式下操作。
配置时钟相位时要确保数据的中心在SCLK周期的第一个正边缘处,在选择极性时要确保SCLK在静止状态时为低电平。
图2 SPI接口的时钟相位和极性
3.2SPI接口的时间要求
关于SPI接口的时间要求,详情请查看芯片数据表。
值得注意的是最大SCLK频率(fsclk)是如何改变的,这主要取决于SPI接口的使用情况。
SPI时钟运行的最大频率是10 MHz,在地址字节和数据字节(单字节)之间、地址和数据之间或者每一个数据字节之间(突发访问)的最小延迟是100ns。
如图3所示。
图3 f SCLK = 10 MHz Max
如果各字节之间没有延迟,那么单通道的最大时钟速度是9MHz(图4),突发访问为6.5MHz(图5)。
3.3SPI的访问
芯片上有47个配置寄存器(地址0000至地址0x2E)。
寄存器的读写操作由头地址的R/W 位控制,而burst突发访问位控制访问方式为单字节还是突发访问。
图6 头地址
当CSn变低,我们总是要等到MISO(CHIP_RDYn)变为低电平之后再进行头地址的写操作。
CHIP_RDYn信号表明晶体正在运行,调节数字供给电压是稳定的。
只要芯片不是在SLEEP或XOFF状态或者一个SRES闪光灯发出命令的情况下,SO引脚总是在CSn变成低电平之后也迅速变为低电平。
图7
图7显示了电磁波从IDLE (1)静止状态转变为SLEEP休眠状态(SPWD),接着通过发射一个TX滤波(STX) (2)使其在休眠状态后被唤醒的工作过程。
当CSn变为低电平时电磁波从休眠状态中唤醒。
在CSn首次变为低电平时,MISO变为高电平,然后又立即成为低电平,这样就表示芯片已经准备工作了。
当CSn第二次变为低电平时,因为电磁波回到了休眠状态,所以MISO又变为高电平。
等到电压调节器稳定之后,晶体开始运行,MISO变回低电平,此时可以安全发送TX滤波。
3.4单字节访问
单字节访问寄存器时,突发访问位必须置0。
发送地址头以后可以根据R/W位发送或读入一个数据字节。
在数据字节之后等待一个新的地址,因此,CSn继续保持低电平。
图8表明了数据0x0A是如何首先写入寄存器0x02,然后从同一个寄存器中读出来的。
3.5突发访问
当突发访问位置1时,电磁波会要求一个地址字节和接下来的连续的数据字节,直到CSn 变为高电平,访问终止。
3.6命令滤波
命令滤波是单字节指令,它可以启动一个内部序列(启动RX,进入掉电模式等)。
命令滤波和一系列的状态寄存器(地址0x30到地址0x3F)共享地址。
这些状态寄存器不能用突发访问模式来访问。
如果突发访问位是1,那么访问的就是状态寄存器;如果突发访问位是0,则发送一个命令滤波。
一个命令滤波可能在任何其他SPI访问之后,而不需要将CSn拉至高电平。
在处理完一个SRES命令滤波之后,当MISO引脚变成低电平时,可以处理下一个命令滤波。
命令滤波可以立即被执行,但是当CSn为高电平时SPWD和SXOFF滤波是例外。
当CSn被拉为低电平时,MISO已经变为低电平,表明芯片已经准备好了。
SIDLE(离开RX/TX)滤波紧随在一个寄存器写操作和一个无需等待CHIP_RDYn信号的SRES(重启芯片)滤波后。
在复位滤波之后,在MISO变为低电平之前需要一些时间才能读寄存器0x00。
从这个寄存器读到的数值是0x29(复位之后的默认数值)。
4芯片的状态字节
当在SPI接口上发送头字节、数据字节或命令滤波时,CC1100在SO引脚上发送芯片状
表1 状态字节概要
当写寄存器时,每次一个头字节或者数据字节在MOSI 引脚上传送,一个状态字节都在MISO 引脚上传送。
当读寄存器时,每次一个头字节在 MOSI 引脚上传送时,一个状态字节都在MISO引脚上传送。
注意状态字节的4LSB(FIFO_BYTES_AVAILABLE)可以为TX FIFO (R/W = 0) or和RX FIFO (R/W = 1)提供信息。
图11 状态字节说明
第一次转移是将0x0A写到寄存器0x02上。
因为这是一个写操作,所以当地址头(1)和数据字节(2)都传送时,状态字节在MISO线上传送。
状态字节(0x0F)告诉我们,电磁波处于空闲状态,并且TX FIFO (FIFO_BYTES_AVAILABLE = 15)上有15个或以上的自由字节。
第二次转移是从寄存器0x02上进行读操作。
因为这是一个读操作,所以仅仅在传送地址头时状态字节才能在MISO线上传送。
在MISO线上的下一个字节是寄存器0x02的内容——0x0A。
这个状态字节告诉我们电磁波处在空闲状态(STATE = 0),并且在RX FIFO(FIFO_BYTES_AVAILABLE = 0)上没有字节可用。
5复位
当电源电压满足在数据表中详细列出的需求时,相应的上电复位功能就可以保证。
否则,认为芯片处于一个未知状态,直到一个执行SW复位(见图12)。
•选通低/高电平
•相对于把CSn拉低之后,保持CSn高电平至少40μs
•将CSn拉低以等待SO变为低电平
•在SI线上执行SRES滤波
图12 通过SRES的上电复位
看下面的代码:
6总说明。