第四节 系统信号流图及梅逊公式..
梅逊公式
2.4 控制系统的方块图、信号流图与梅逊公式控制系统的方块图是系统各元件特性、系统结构和信号流向的图解表示法。
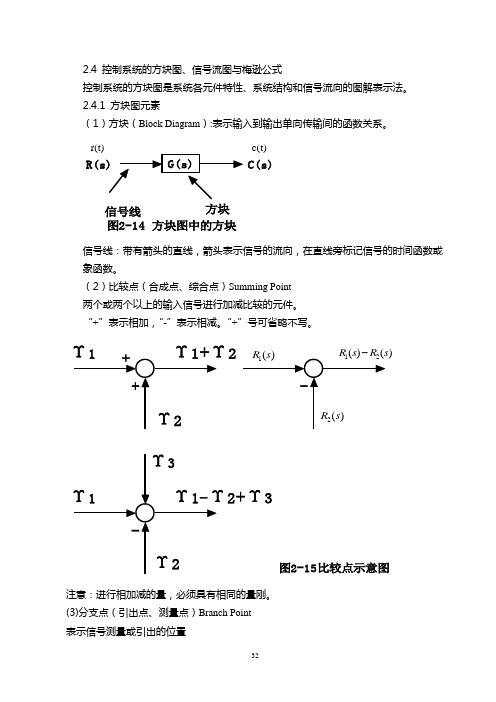
2.4.1 方块图元素(1)方块(Block Diagram ):表示输入到输出单向传输间的函数关系。
C(s)图2-14 方块图中的方块信号线方块r(t)c(t)信号线:带有箭头的直线,箭头表示信号的流向,在直线旁标记信号的时间函数或象函数。
(2)比较点(合成点、综合点)Summing Point 两个或两个以上的输入信号进行加减比较的元件。
“+”表示相加,“-”表示相减。
“+”号可省略不写。
2)2+Υ3图2-15比较点示意图注意:进行相加减的量,必须具有相同的量刚。
(3)分支点(引出点、测量点)Branch Point 表示信号测量或引出的位置图2-16分支点示意图注意:同一位置引出的信号大小和性质完全一样。
2.4.2 几个基本概念及术语R(s)N(s)打开反馈图2-17 反馈控制系统方块图(1) 前向通路传递函数 假设N(s)=0打开反馈后,输出C(s)与R(s)之比。
在图中等价于C(s)与误差E(s)之比。
)()()()()(21s G s G s G s E s C == (2) 反馈回路传递函数 Feedforward Transfer Function 假设N(s)=0 主反馈信号B(s)与输出信号C(s)之比。
)()()(s H s C s B = (3) 开环传递函数 Open-loop Transfer Function 假设N(s)=0 主反馈信号B(s)与误差信号E(s)之比。
)()()()()()()(21s H s G s H s G s G s E s B == (4) 闭环传递函数 Closed-loop Transfer Function 假设N(s)=0 输出信号C(s)与输入信号R(s)之比。
)()(1)()()(1)()()()(21s G s H s G s G s H s G s G s R s C +=+= 推导:因为)()]()()([)()()(s G s H s C s R s G s E s C -== 右边移过来整理得)()(1)()()(s G s H s G s R s C += 即开环传递函数前向通路传递函数+=+=1)()(1)()()(s G s H s G s R s C **(5) 误差传递函数 假设N(s)=0 误差信号E(s)与输入信号R(s)之比。
信号流 图与梅逊增益公式
【例 2-17】已知某系统的信号流图如图所示,试求其传递函数。
【解】由图可知,此系统有两条前向通路,即 n 2 ,其增益各为 p1 abcd 和 p2 fd ;
有三个回路,即 L1 be ,L2 abcdg ,L3 fdg ,因此 La L1 L2 L3 。上述三个 回路中只有 L1 与 L3 互不接触,L2 与 L1 及 L3都接触,因此 LbLc L1L3 。由此得系统的
(1)源点:也称输入节点,指只有输出支路的节点,如图中的 x1 。它一般表 示系统的输入量。
(2)汇点:也称输出节点,指只有输入支路的节点,如图中的 x6 。它一般表
示系统的输出量。
(3)混合节点:既有输入支路又有输 出支路的节点称为混合节点,如图中
的 x2 ,x3 ,x4 。它一般表示系统的中间
变量。
数。由于信号流图和结构图之间存在相应的联系,因此梅逊增益公式同样也
适用于结构图。
梅逊增益公式给出了系统信号流图中任意输入节点与输出节点
之间的增益(即传递函数),其公式为
式中
P
1
n k 1
pk k
n ——从输入节点到输出节点的前向通路的总条数;
pk ——从输入节点到输出节点的第 k 条前向通路总增益;
(5)回路:单独回路的简称,即起点和终点在同一节点且信号通过每一个节点不多于
一次的闭合通路。从一个节点开始,只经过一条支路又回到该节点的回路,称为自回
路。回路中所有支路增益的乘积称为回路增益,用 La 表示。在图中共有三条回路,一 条是起始于节点 x2 ,经过节点 x3 最后回到节点 x2 的回路,其回路增益为 L1 bc ;第二 条是起始于节点 x,2 经过节点 x,3 ,x4 x最5 后又回到节点 x的2 回路,其回路增益 为 L2 cegh ;第三个是起始于节点 x4 并回到节点 x4的自回路,其回路增益为 L3 f 。
梅逊公式
回章首
回节首
21
解: 有三条前向通路, 前向通路的增益分别为
n3
p1 G1G2 G3G4 G5 p2 G1G6 G4 G5 p3 G1G2 G7
有四个独立的回路,分别为
L1 G2 G3G4 G5 H 2 L2 G6 G4 G5 H 2
在四个回路中,L3与L4不接触。
L3 G2 G7 H 2 L4 G4 H1
特征式为
1 ( L1 L2 L3 L4 ) L3 L4
回章首 回节首 22
前向通路p1与四个回路均接触,
1 1
前向通路p2与四个回路均接触,
2 1
前向通路p3与回路L4不接触,
L3a L4 ,
a
3 1 L4
闭环传递函数为
Y (s) P 1 ( p11 p2 2 p3 3 ) R( s) p1 p2 p3 (1 L4 ) 1 ( L1 L2 L3 L4 ) L3 L4 G1G2G3G4G5 G1G6G4G5 G1G2G7 (1 G4 H1 ) 1 G2G3G4G5 H 2 G6G4G5 H 2 G2G7 H 2 G4 H1 G2G7 H 2G4 H1
(2-123)
回章首
回节首
18
特征式
的计算公式为
1 La Lb Lc
a b,c
d ,e, f
L
d
Le L f ....
(2-124)
L —所有独立回路增益之和; —所有每两个互不接触回路增益乘积之和; L L —所有每三个互不接触回路增益乘积之和。 L L L
a a
第四节 系统信号流图及梅逊公式

第三章 系统数学模型
信号流程图
R( s )
G (s)
C (s)
R(s)
G( s) C ( s )
R(s) +
2
E(s)
G(s)
C(s)
R( s )
1
E ( s)
G(s)
C ( s)
_
H(s)
H (s) N(s)
N(s)
C(s)
1
R (s) +
3
E(s)
_
G 1(s)
+
+
G 2(s)
G2 A2 R A1 G1 B G4 H G3 C
第三章 系统数学模型
画出如所示系统方块图的信号流程图。
解:①用小圆圈表示各变 量对应的节点
系统方块图
G2 R 1 G1 1 e1 e2 G4 G3
②在比较点之后的引出点 只需在比较点后设置一个节 点便可。也即可以与它前面 的比较点共用一个节点。
③在比较点之前的引出点B,需设 置两个节点,分别表示引出点和 比较点,注意图中的 e1 e2
1
1 R1
1
1 C1s
ui
ue
I1
I
a 1 b u
1 R2
1 C2 s
I2
uo
上图中,u i和ue,I1和I,a和b可以合并。为什么?
机械工程控制基础
习题3-16: 求如图所示信号流图的总增益
a42 a12 a44 a34 x3 x4 a35 a52
P2
第三章 系统数学模型
X 5 (s) ? X 1 ( s)
信流图运算法则:
机械工程控制基础
(a)
信号流图与梅森公式
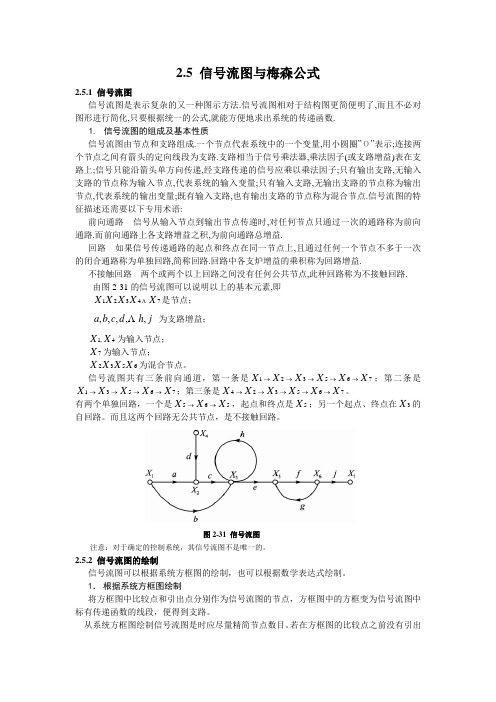
2.5 信号流图与梅森公式2.5.1 信号流图信号流图是表示复杂的又一种图示方法.信号流图相对于结构图更简便明了,而且不必对图形进行简化,只要根据统一的公式,就能方便地求出系统的传递函数.1. 信号流图的组成及基本性质信号流图由节点和支路组成.一个节点代表系统中的一个变量,用小圆圈”Ο”表示;连接两个节点之间有箭头的定向线段为支路.支路相当于信号乘法器,乘法因子(或支路增益)表在支路上;信号只能沿箭头单方向传递,经支路传递的信号应乘以乘法因子;只有输出支路,无输入支路的节点称为输入节点,代表系统的输入变量;只有输入支路,无输出支路的节点称为输出节点,代表系统的输出变量;既有输入支路,也有输出支路的节点称为混合节点.信号流图的特征描述还需要以下专用术语:前向通路 信号从输入节点到输出节点传递时,对任何节点只通过一次的通路称为前向通路.而前向通路上各支路增益之积,为前向通路总增益.回路 如果信号传递通路的起点和终点在同一节点上,且通过任何一个节点不多于一次的闭合通路称为单独回路,简称回路.回路中各支炉增益的乘积称为回路增益.不接触回路 两个或两个以上回路之间没有任何公共节点,此种回路称为不接触回路. 由图2-31的信号流图可以说明以上的基本元素,即 74321X XX X X是节点;j h d c b a ,,,,, 为支路增益;4,1X X 为输入节点;7X 为输入节点;6532X X X X 为混合节点。
信号流图共有三条前向通道,第一条是765321XXXXXX →→→→→;第二条是76531X XXXX →→→→;第三条是765324X XXXXX→→→→→。
有两个单独回路,一个是565X X X →→,起点和终点是5X ;另一个起点、终点在3X 的自回路。
而且这两个回路无公共节点,是不接触回路。
图2-31 信号流图注意:对于确定的控制系统,其信号流图不是唯一的。
2.5.2 信号流图的绘制信号流图可以根据系统方框图的绘制,也可以根据数学表达式绘制。
系统的信号流图与梅森公式
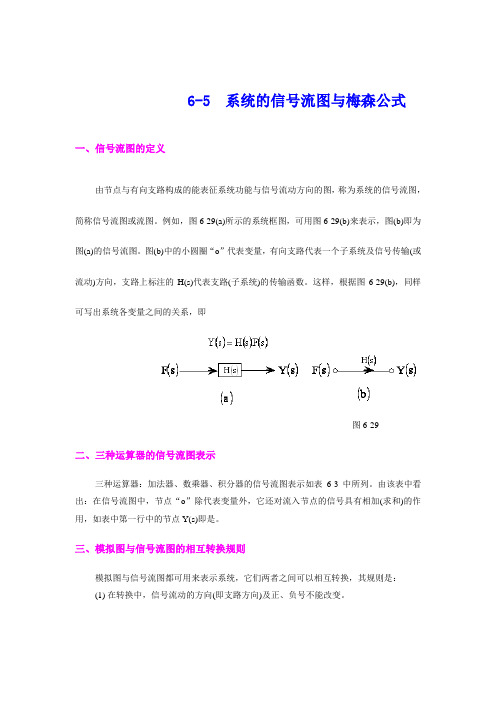
6-5 系统的信号流图与梅森公式一、信号流图的定义由节点与有向支路构成的能表征系统功能与信号流动方向的图,称为系统的信号流图,简称信号流图或流图。
例如,图6-29(a)所示的系统框图,可用图6-29(b)来表示,图(b)即为图(a)的信号流图。
图(b)中的小圆圈“o”代表变量,有向支路代表一个子系统及信号传输(或流动)方向,支路上标注的H(s)代表支路(子系统)的传输函数。
这样,根据图6-29(b),同样可写出系统各变量之间的关系,即图6-29二、三种运算器的信号流图表示三种运算器:加法器、数乘器、积分器的信号流图表示如表6-3中所列。
由该表中看出:在信号流图中,节点“o”除代表变量外,它还对流入节点的信号具有相加(求和)的作用,如表中第一行中的节点Y(s)即是。
三、模拟图与信号流图的相互转换规则模拟图与信号流图都可用来表示系统,它们两者之间可以相互转换,其规则是:(1) 在转换中,信号流动的方向(即支路方向)及正、负号不能改变。
(2) 模拟图(或框图)中先是“和点”后是“分点”的地方,在信号流图中应画成一个“混合”节点,如图6-30所示。
根据此两图写出的各变量之间的关系式是相同的,即。
(3) 模拟图(或框图)中先是“分点”后是“和点”的地方,在信号流图中应在“分点”与“和点”之间,增加一条传输函数为1的支路,如图6-31所示。
(4) 模拟图(或框图)中的两个“和点”之间,在信号流图中有时要增加一条传输函数为1的支路(若不增加,就会出现环路的接触,此时就必须增加),但有时则不需增加(若不增加,也不会出现环路的接触,此时即可以不增加。
见例6-17)。
(5) 在模拟图(或框图)中,若激励节点上有反馈信号与输入信号叠加时,在信号流图中,应在激励节点与此“和点”之间增加一条传输函数为1的支路(见例6-17)。
(6) 在模拟图(或框图)中,若响应节点上有反馈信号流出时,在信号流图中,可从响应节点上增加引出一条传输函数为1的支路(也可以不增加,见例6-17)。
2.6信号流图与梅森公式
G2 ( s) H ( s) N ( s) N ( s) 1 G1 ( s)G2 ( s) H ( s)
N ( s)
7)系统的总输出 X o (s) i (s) X i (s) N (s) N (s)
8)系统的总偏差 (s) i ( s) X i ( s) N (s) N (s) 结论
练习 试化简下图所示系统的方框图,并求系 统传递函数。
可看出此题方框图化简较复杂,试用梅森公式化简.
• 两条前向通路 • 两条回路 • 主特征式
P G1G3G5 , P2 G2G4G5 1
L1 G3 H , L2 G4 H
1 ( L1 L2 ) 1 G3 H G4 H
【例1】根据微分方程绘制信号流图
i1 (t ) 1 R1 [ui (t ) u A (t )]
1 u A (t ) [i1 (t ) i2 (t )]dt C1
1 i2 (t ) [u A (t ) uo (t )] R2
uo (t) 1 C2
i (t )dt
2
一般闭环控制系统的结构如下图所示
1)闭环系统的开环传递函数 将闭环控制系统主反馈 通道的输出断开,即 H(s)的输出通道断开 时,前向通道传递函数与反馈通道传递函数的乘积 G1(s)G2(s)H(s)称为该闭环控制系统的开环传递函数 ,记为GK(s)。
闭环系统的开环传递函数也可定义为反馈信 号B(s)和偏差信号ε(s)之间的传递函数,即:
X o ( s) G( s) G1 ( s)G2 ( s) ( s)
B( s) H ( s) X o (s)
4)输入信号作用下的闭环传递函数
令n(t)=0,此时在输入xi(t)作用下系统的闭环传 递函数为:
梅逊公式的应用
1 1
1 G 2 G 3 G 5 G 3 G 4 G 6 G 1G 2 G 3 G 4 G 7 G3
3个回路 具有的公共传递函数:
G (s)
G 1G 2 G 3 G 4 1 G 3 G 4 G 6 G 2 G 3 G 5 G 1G 2 G 3 G 4 G 7
例2:利用梅逊公式求如图所示系统的传递函数
G4(s)
+
R(s)
+ +
G1(s)
-
+
G2(s)
-
G3(s) H2(s)
+
Y(s) ②
-
① H1(s) H3(s)
③
系统的信号流图为: R(s)
1 1 G1 1 G2
G4 G3 1 1
Y(s)
①
-H1 -H3 ③
-H2
②
2.6
P1=G1G2G3; P2=G1G4
2.6
解: 前向通道(1条): 反馈回路(5个):每个均为
P1
系统信号流图及梅逊公式
1
R C s 1
RCs
3
3
3
1 1
则
a
La
5 RCs
两个互不接触回路(6个):①②、①③、③④、①⑤、②③、④⑤
每对传递函数之积为:
1 R C s
2 2 2
则
Lb Lc
6 R C s
3
2 2 2
bc
def
a
Lb Lc
d
每两个互不接触回路中所有传递函数乘积之和(含符号)
每三个互不接触回路中所有传递函数乘积之和(含符号)
第2章 第4讲 信号流图及其梅逊公式
4
输入节点 输出节点 混合节点
混 合 节 点
X a X
输入节点 d 源点) (源点)
X
5
1
2
b
X
3
输入节点 源点) (源点)
c
输出节点 汇点) (汇点)
4
支路
连接两个节点的定向线段,用支路增益(传递函数)表示方 连接两个节点的定向线段,用支路增益(传递函数) 程式中两个变量的因果关系。支路相当于乘法器。信号在支 程式中两个变量的因果关系。支路相当于乘法器。 路上沿箭头单向传递。 路上沿箭头单向传递。
-1 Ui 1
1/R1
I1
1/sC1
UA
1
1/R2
I2 1/sC 2
1 Uo
-1
-1
23
(Mason)公式 6 梅逊 (Mason)公式
G —系统总传递函数或增益
1 n G ( s) = ∑ Pk k k =1
条前向通路的传递函数(通路增益) Pk—第k条前向通路的传递函数(通路增益) —特征式
自动控制原理
第4讲 信号流图及梅 逊公式
杨金显
yangjinxian@
河南理工大学电气工程与自动化学院
1
本节内容
信号流图及其术语 信号代数运算法则 根据微分方程绘制信号流图 根据结构图绘制信号流图 梅逊公式 根据梅逊闭环传递函数
2
1 信号流图概念 信号流图起源于梅逊( MASON) 信号流图起源于梅逊(S.J. MASON)利用图示法来 描述一个和一组线性代数方程, 描述一个和一组线性代数方程,是由节点和支路组成 的一种信号传递网络。 的一种信号传递网络。
步骤: 、画出前向通路(可能有多个 可能有多个); 步骤:1、画出前向通路 可能有多个 ; 2、确定节点(多画一个没有关系 ; 、确定节点 多画一个没有关系 多画一个没有关系); 3、连接各支路、回路 、连接各支路、
信号流图梅森公式
2/5/2020
14
梅逊公式||例2-13
[例2-13]:绘出两级串联RC电路的信号流图并用Mason公式计算 总传递函数。
ui (s) ue (s) 1 I1(s) -
1 u(s)
-
R1
I(s) C 1s
-
1
1 uo(s)
R 2 I2(s) C 2 s
[解]:先在结构图上标出节点,再根据逻辑关系画出信号流图如
18
梅逊公式||例2-15
例2-15:数数有几个回路和前向通道。
G6
R
G5
1
G2
1
G7
G3
G4
1
G1
1
H2
G8
H1
有四个回路,分别是:
1
C
G 2 H 2 , G 1 G 2 G 3 G 4 H 1 , G 1 G 2 G 7 G 4 H 1 , G 1 G 2 G 8 G 4 H 1
P7 G6G3G4 P8 G6G8G4
P 9G 6H 2G 2G 7G 4
2/5/2020
19
梅逊公式||例2-15
对应的结构图为:
G6 G5
R - G1
R 1
G6
G5
1
G1
+
-
G2
H2
H1
G7
G2 1
G3
1
Байду номын сангаас
H2
G8
H1
G7
G3
+
++
+
G4
C
G8
为节点
注意:①信号流
G4
1
图与结构图的对
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C1 ( s )
5
G21 ( s )
G12 ( s ) R2 ( s )
G12 ( s ) R2 ( s )
G21 ( s )
C2 ( s ) G22 ( s )
G22 ( s )
+
+
C2 ( s )
机械工程控制基础
四、梅逊 (Mason)公式 :
第三章 系统数学模型
1 n G(s) Pk Δ k Δ k 1
1
机械工程控制基础
第三章 系统数学模型
注意:图中C位于比较点的前面,为了引出C处的信号要用一 个传输为1的支路把C、D的信号分开。 题目中单独回路有L1、L2和L3,互不接触回路有 L1L2,即 :
L1 1 R 1 C1s
L2 1 R 2 C2s
L3 1 R 2 C1s
L1L 2
机械工程控制基础 例3-25:
R( s) + B( s)
第三章 系统数学模型
E (s) _
G1 ( s )
+
_
G2 ( s )
C (s)
解:画出信号流图
1
R( s)
G1 ( s )
1
1
G2 ( s )
1
C (s)
1
1
机械工程控制基础
第三章 系统数学模型
题目中单独回路有L1、L2和L3,互不接触回路有 L1L2,即 :
x5
f
x1
a
x2
b
x3
c
x4
d
e
机械工程控制基础
第三章 系统数学模型
前向通路总增益:前向通路上各支路增益的乘积 如:x1→x2→x3→x4总增益abc。 回 路:通路的起点就是通路的终点,并且与其它节点相交不 多于一次的闭合通路叫回路。 回路增益:回路中,所有支路增益的乘积。图中有两 个回 路,一个是x2→x3→x2,其回路增益为be, 另一个 回 是x2→x2,又叫自回路,其增益为d。 不接触回路:指相互间没有公共节点的回路。图中无。
机械工程控制基础
第三章 系统数学模型
例3-26: 已知结构图如下,可在结构图上标出节点,如上 图所示。然后画出信号流图如下图所示。
k m
R( S )
g
V1
b
d l f
V3
e h
C (S ) V2
f R 1
Ⅰ
m
h V3 k Ⅱ Ⅲ d Ⅴ e g l
Ⅳ
b V1
C
V2 1
机械工程控制基础
习题3-14:
L L L k
机械工程控制基础 例3-23 利用梅逊公式,求:C(s)/R(s)
G7
第三章 系统数学模型
G6
R(s)
G1
+ -
G2
G3
+
+
G4
-
G5
+
+ C ( s)
H1
H2
解:画出该系统的信号流程图
G6
R ( s ) G1
G2 G3
G7
G4 G5
1 C (s)
H1
H2
机械工程控制基础
G2 A2 R A1 G1 B G4 H G3 C
第三章 系统数学模型
画出如所示系统方块图的信号流程图。
解:①用小圆圈表示各变 量对应的节点
系统方块图
G2 R 1 G1 1 e1 e2 G4 G3
②在比较点之后的引出点 只需在比较点后设置一个节 点便可。也即可以与它前面 的比较点共用一个节点。
③在比较点之前的引出点B,需设 置两个节点,分别表示引出点和 比较点,注意图中的 e1 e2
Δ=1-(L1 + L2 + L3 + L4)+ L1 L2
该系统的前向通道有三个:
P1= G1G2G3G4G5 P2= G1G6G4G5 P3= G1G2G7 Δ1=1 Δ2=1 Δ3=1-L1
机械工程控制基础
第三章 系统数学模型
因此,系统的闭环系统传递函数C(s) / R(s)为
C(s) 1 G (p1Δ1 p2Δ2 p3Δ3 ) R(s) Δ G1G 2G3G 4G5 G1G 6G 4G5 G1G 2G 7 (1 G 4H1 ) 1 G 4 H1 G 2G 7 H 2 G 6G 4G 5H 2 G 2G 3G 4G 5H 2 G 4H1G 2G 7 H 2
机械工程控制基础
第三章 系统数学模型
C ( s) E ( s) 习题3-17:使用Mason公式计算下述结构图的传递函数 , R( s) R( s)
G4
R
E
-
G1
H1
+
G2
+ -
G3
H2
C
[解]:在结构图上标出节点,如上。然后画出信号流图,如下:
R
G4 E G1 G2 H1
H1H 2
i 1 (因为三个回路都与前向通道接触。)
机械工程控制基础
11 R1ຫໍສະໝຸດ 第三章 系统数学模型1
1
1 C1s
ui
ue
I1
1
I
a 1 b u
1 R2
1 C2 s
I2
1
uo
讨论:信号流图中,a点和b点之间的传输为1,是否可以将该两 点合并。使得将两个不接触回路变为接触回路?如果可以的话, 总传输将不一样。 不能合并。因为a、b两点的信号值不一样。
(a)
a23 x2 a32
a45
x5
x1
(b)
(c)
P 1 a12a23a34a45 x5
x5
P P 1 a12a23a35 2
1 1
x1
x2
x3
x4
x1
x2
x3
2 1 a44
机械工程控制基础
(d)
x2 L1 a23a32 x3 互不接触
第三章 系统数学模型
a42 a12 a44 a34 x4 a35 a52 a45 x5
序号 方块图 1
第三章 系统数学模型
信号流程图
R( s )
G (s)
C (s)
R(s)
G( s) C ( s )
R(s) +
2
E(s)
G(s)
C(s)
R( s )
1
E ( s)
G(s)
C ( s)
_
H(s)
H (s) N(s)
N(s)
C(s)
1
R (s) +
3
E(s)
_
G 1(s)
+
+
G 2(s)
1
1 R1
1
1 C1s
ui
ue
I1
I
a 1 b u
1 R2
1 C2 s
I2
uo
上图中,u i和ue,I1和I,a和b可以合并。为什么?
机械工程控制基础
习题3-16: 求如图所示信号流图的总增益
a42 a12 a44 a34 x3 x4 a35 a52
P2
第三章 系统数学模型
X 5 (s) ? X 1 ( s)
机械工程控制基础
第三章 系统数学模型
第四节 系统信号流图及梅逊公式
主讲人 :王
辉
机械工程控制基础
第三章 系统数学模型
信号流图是线性代数方程组结构的一种图形表达。 设一组线性方程式如下:
x1 x1 x2 ax1 dx2 ex3 x3 x4 x5
1 1 1 1 1 R1C1s R2C2 s R2C1s R1R2C1C2 s 2
1 1 1 有两个互不接触回路; Lb Lc R1C1s R2C2 s R1R2C1C2 s 2
1 1 1 总传输为:P Pk k k 1 R1R2C1C2 s 2 ( R1C1 R2C2 R1C2 )s 1
x5
f
x1
a
x2
b
x3
c
x4
d
e
机械工程控制基础
第三章 系统数学模型
信号流图与结构图的对应关系
信号流图
源节点 阱节点 混合节点 支路 支路增益 前向通路 回路 互不接触回路
结构图
输入信号 输出信号 比较点,引出点 环节 环节传递函数
机械工程控制基础
第三章 系统数学模型
二、信流图的性质及运算法则 1、每一个节点表示一个变量,并可以把所有 输入支路信号迭加再传送到每一个输出支 路。 2、支路表示了一个信号对另一个信号的函数 关系。支路上的箭头方向表示信号的流向。 3、混合节点可以通过增加一个增益为1的支路 变成为输出节点,且两节点的变量相同。
信流图运算法则:
机械工程控制基础
(a)
x1
第三章 系统数学模型
a
x2
a
(b )
x1
x2
x1
ab
x2
b
(c )
x1
a
x2
b x3
x1
ab
x2
ab 1 bc
x1
(d )
a
x2
b
x3
x1
ab x3 bc
x1
x3
c
x1
( e)
x2
a
b
x1 x3
c
x4
x2
ac
x4
bc
机械工程控制基础 三、 控制 系统 的信 号流 程图
x5
bx2 cx3
fx5 x5
信号流图的表示形式