云台控制系统开题报告
开题报告定稿(范例)

洛阳理工学院
毕业设计(论文)开题报告
图 1 云台
°,垂直旋转角度为+90°。
4°/s左右。
中速云台的水
°/s左右。
高速云台的水平
以上。
云台的应用范围很广,现如今云台主要用于安全监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接、方便,获取的信息内容更丰富。
图 2 监控的烦恼
由于以上原因,监控技术被迫向智能化的方向发展,而智能化不仅需要对控制终
图 3 高精度数字云台
除此以外如低成本吊舱、全站仪等,也都需要这样一种含有精确位置反馈的、相对较低成本的云台。
因此从事高精度激光跟踪指示云台的研究就具有非凡的意义,能够一定程度上解决上述问题,为社会带来一定的经济效益。
研究的基本内容,拟解决的主要问题
研制一个含有高精确位置控制和反馈的云台,计算机能够通过串行接口来对云台。
二自由度简易云台增稳控制系统设计

二自由度简易云台增稳控制系统设计项目简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制。
项目方案:本课题分以下步骤展开研究:2014年4月~ 2014年10月收集有单片机接口程序设计方面的资料,学习相关理论知识;2014年11月~2014年12月学习MWC飞行控制板的程序设计技术;2015年1月~2015年4月设计板载姿态传感器数据读取;2015年5月~ 2015年8月设计舵机控制程序和平台机械结构,测试平台增稳性能;2015年9月~2015年10月撰写研究报告、结题,项目鉴定。
本项目主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制预期成果:本项目要求完成如下成果:设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试。
完成研究报告一份。
二自由度云台概述:云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结。
其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置。
主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展。
根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台。
增稳的意义:比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定。
如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的。
将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的功能。
云平台中的虚拟机调度系统的设计与实现的开题报告
云平台中的虚拟机调度系统的设计与实现的开题报告一、选题背景随着互联网技术的发展,云平台的应用越来越广泛,尤其是在企业信息化建设中的应用,云平台更是成为了企业IT建设所必不可少的环节之一。
如今,许多企业都采用云平台进行应用开发、数据存储和计算等活动,其中虚拟机调度系统是云平台中一个非常重要的组成部分。
虚拟机调度系统主要是通过虚拟化技术,使得一台物理机可以容纳多个虚拟机,实现资源的共享和利用率的提高。
然而,当虚拟机数量较多时,调度系统也面临着种种挑战,如如何合理地分配虚拟机、如何维护虚拟机的负载均衡、如何提高虚拟机的运行效率等问题。
因此,设计一个高效的虚拟机调度系统是云平台架构中的一个非常重要的环节。
二、研究目的本文的主要研究目的是设计一个高效的虚拟机调度系统,并利用实验和仿真等方法对该系统进行实现和评估,为现有云平台的应用提供更加优质的计算资源服务。
三、研究内容1.分析目前虚拟机调度系统的研究现状,并归纳总结其优缺点。
2.针对目前虚拟机调度系统存在的问题,提出一种基于负载均衡的虚拟机调度算法,并对该算法进行实验验证。
3.实现虚拟机调度系统,包括虚拟机的动态分配、虚拟机负载均衡、虚拟机迁移等功能,并对系统进行性能测试和评估。
4.采用仿真等方法,对虚拟机调度系统的性能进行测试和优化,优化虚拟机调度系统中各个模块的工作效率,提高系统的整体性能和稳定性。
四、预期结果1.针对现有虚拟机调度系统的缺陷,提出一种能够有效提高系统效率和稳定性的虚拟机调度算法。
2.实现一个虚拟机调度系统,包括虚拟机的动态分配、负载平衡等功能,并对其进行性能测试和评估,验证算法的有效性和系统的性能表现。
3.优化虚拟机调度系统中各个模块的工作效率,提高系统的整体性能和稳定性。
五、研究方法本文将采用实验、仿真、理论分析等方法进行研究。
1.实验:利用云平台模拟实验室等环境开展实验,验证虚拟机调度算法的效果。
2.仿真:采用NS-3等仿真平台对虚拟机调度系统进行仿真,对系统中各个模块进行性能测试和评估。
两轴数控转台控制系统研究的开题报告
两轴数控转台控制系统研究的开题报告一、选题背景随着工业自动化技术的快速发展,控制系统越来越智能化、多功能化。
而转台作为一种重要的工业设备,在精度、稳定性、速度等方面也得到了极大的提升。
在工业生产和机械加工中,转台具有非常广泛的应用,例如金属加工、汽车制造、航空航天、电子制造、电力工业等领域。
对于特别精密的机床、机器人等机械设备,要求转台的控制系统具有高精度、高速度、高性能等特点。
因此,研究转台的控制系统成为控制领域的热门话题。
本文将从两轴数控转台控制系统设计分析入手,研究转台的控制系统的硬件架构和软件设计,探讨其原理和应用,旨在为工业生产和机械加工领域提供一种智能、高效、稳定的控制系统。
二、研究内容1. 两轴数控转台控制系统的硬件设计和选型。
2. 两轴数控转台控制系统的软件设计和编程开发。
3. 两轴数控转台控制系统在工业生产和机械加工中的实际应用研究。
三、研究方法1. 调研和分析国内外相关文献,了解相关技术和研究现状。
2. 采用MATLAB/Simulink等软件进行仿真和模拟。
3. 基于硬件平台,利用C++、PLC等编程语言进行实际应用的开发和测试。
四、研究意义1. 对于数控转台的控制系统设计和开发有积极推进作用。
2. 可以为实现硬件和软件的智能化设计提供借鉴。
3. 对于提高转台的稳定性和精度,增强其适用性有一定的推动作用。
4. 可以为工业生产和机械加工提高效率、降低成本和提高产品质量提供支持。
五、预期结果1. 硬件和软件纪实研究成果。
2. 可以进一步提高两轴数控转台的控制精度和稳定性。
3. 提高工业生产和机械加工的效率和质量。
六、论文结构1. 绪论2. 相关技术概述3. 两轴数控转台控制系统的硬件设计与实现4. 两轴数控转台控制系统的软件设计与实现5. 两轴数控转台控制系统的仿真分析6. 两轴数控转台控制系统的应用实验研究7. 总结与展望七、进度安排1. 第一季度:调研、文献分析、硬件设计和选型。
基于51单片机的云台控制系统设计

1.3 本设计完成的任务
本次设计是以单片机为控制器,设计一个云台控制系统,使云台按期望的方式运行,同时还要与远程控制室计算机进行通信。
本次设计完成的任务:
(1)设计单片机外围电路及步进电机驱动电路,驱动云台步进电机运行。
(2)使用键盘输入控制云台步进电机。
(3)PC使用RS485总线远距离控制云台步进电机。
Key word: AT89C52; Yuntai control; Stepper motor; Simulation ;Serial communication
第
1.1 云台
安全监控是随着人们生活生产需求应运而生的一项安全技术,安防系统由前端、传输、信息处理/控制/显示/通信三大单元组成。云台系统作为前端转动控制部件,在整个系统中起到非常重要的作用。
(4)使用KeiluVision2编写软件,在Proteus软件中完成仿真。
第
2.1 云台概述
摄像机云台是一种安装在摄像机支撑物上的工作平台,用于摄像机与支撑物之间的连接,同时它具有水平和垂直运动的功能,在云台水平、垂直运动的同时,它也带动摄像机做相同的运动,这样就能通过控制云台的运动来控制摄像机的运动,它与摄像机配套使用能达到扩大监视范围的目的,提高了摄像机的使用价值。云台的核心器件是步进电机,所以本设计的重点就是如何灵活的控制步进电机的运转,从而达到灵活的控制摄像机的目的。云台可以按照运动功能、工作电压、承载重量、安装方式、使用环境等分类。
基于单片机的云台控制系统设计
基于单片机的云台控制系统设计摘要本文介绍了一种基于单片机的云台控制系统设计方法。
本系统能够对云台进行控制,实现俯仰和方位两个方向的旋转。
该控制系统采用STM32F407单片机作为主控制器,通过串口通信和PWM信号控制两个直流电机的运动实现云台的旋转。
该系统具有稳定性高、控制精度高和响应速度快等优点,在实际应用中具有广阔的应用前景。
关键词:单片机,云台控制,串口通信,PWM信号控制,电机运动AbstractThis paper introduces a design method of a single-chip microcontroller-based pan-tilt control system. The system can control the pan-tilt to achieve rotation in two directions: pitch and azimuth. The control system adopts STM32F407 MCU as the main controller, and controls the motion of two DC motors through serial communication and PWM signal to achieve the rotation of the pan-tilt. This system has the advantages of high stability, high control precision, and fast response speed, and has broad application prospects in practical applications.Keywords: single-chip microcontroller, pan-tilt control, serial communication, PWM signal control, motor motion1. 引言云台作为一种常用的摄像机装置,在许多领域都有广泛的应用。
毕业设计-云台控制器的软件设计

摘要近年来,视频监控得到了迅速发展,其应用范围越来越广。
为扩大监控范围,改善监控视野,可以借助于云台,即把摄像机装在云台上,通过云台转动带动摄像机旋转,同时可以控制摄像机镜头的参数。
云台在监控系统中起着关键的作用,它直接反映监控系统的监控指标。
本文设计了一种基于AT89C52单片机的电动云台控制器。
该控制器能够接收控制台的控制命令,控制云台的垂直运动和水平运动,以及摄像机的聚焦/散焦,变倍近远、光圈变力小,以调整摄像机的视野.本文在介绍课题的应用背景的基础上,重点分析了云台所具备的功能,并针对这些功能提出了本设计的实现方案。
在软件程序设计中,简要介绍了串行通讯的基本知识和详细说明了应用于云台中的通讯协议PELCO-D和PELCO-P等协议,并在此基础上设计了各部分的软件流程图。
最后阐述了本设计所采用的有关软件可靠性方面的措施。
通过调试、系统的实际运行,验证了本设计运行稳定,实现了云台的上下左右旋转,实现了对镜头聚焦、变倍、光圈的控制。
达到了预期的应用目标。
关键词:云台,协议,监控系统,解码器ABSTRASCTIn recent years, the development of video surveillance is rapid, the range of applications become wide. In order to expand the scope of monitoring and improve the monitoring of vision, The pan/tilt/zoom (PTZ) can be used, which means to put a camera on a PTZ and to control the PTZ camera rotating. At the same time, the parameters of the camera lens can be controlled. The PTZ play a key role in the monitoring system, it reflects the performance of monitoring system.In this paper, a controller for electric PTZ, which is based on microcomputer AT89C52 and applied in explosion-proof PTZ system, has been designed. It can receive commands from the controller, which control the PTZ motion, the camera, NEAR/FAR, TELE/WIDE, Close/Open. The parameters of the camera can be saved in memory.First of all, the background of the subject, the classification of PTZ and the development of PTZ Controller are introduced. The functions of PTZ are analyzed. A program for these functions is proposed. Secondly, the entire process in detail about software is described. In the process of software design, the basic concepts of serial communication and both the PELCO-D and PELCO-P protocol are introduced. The main software programs and subroutine are finished. Finally, the reliability design about software is described.Through the actual running of the system, it is proofed that the system runs stable. The PTZ rotating and the parameters of the camera lens and Preset function can be controlled. The goal of the expected is achieved.KEY WORDS: pan/tilt/zoom, protocol, monitoring system, decoder前言云台控制器是视频监控系统中重要的前端控制设备,它接收中心控制设备发送的串行编码信号,通过软件解码后驱动不同的硬件电路,以控制云台、镜头、辅助照明灯光、雨刷等操作,能方便地跟踪被监控目标。
基于ARM和MCX314数控系统平台研究的开题报告
基于ARM和MCX314数控系统平台研究的开题报告一、课题背景随着数控技术和智能制造的不断发展,数控系统的控制和运行效率越来越高。
为了适应这种趋势,研究开发一种基于ARM和MCX314数控系统平台的数控系统具有重要意义。
ARM作为一种嵌入式处理器,具有低功耗、高性能和易于嵌入等优点,可以满足数控系统对高效、快速、低能耗、低成本的要求。
MCX314作为一种高性能数控系统,控制精度高、运行稳定、通信速度快,可以使数控系统具有更好的控制性能。
该研究旨在开发一种性能更优、功能更强大的数控系统,以满足市场上对数控系统质量、效率和性能的需求。
二、研究目的和意义本研究旨在基于ARM和MCX314数控系统平台,在软硬件环节的基础上开发一种性能更强、功能更齐全、操作更简便、运行更稳定的数控系统。
具体目的如下:1. 硬件的目的(1)设计一种基于ARM处理器的嵌入式系统,该系统能够满足数控系统对高效、快速、低能耗、低成本的要求;(2)选用MCX314作为数控系统的中央处理器,提供高精度控制和快速响应能力,提高系统运行的稳定性和可靠性。
2. 软件的目的(1)研究开发数控系统的控制和运行程序,如解析加工指令、实现插补算法、控制机床运动等;(2)设计系统界面,实现参数编辑、图形界面显示等功能,提高操控便捷性。
3.应用的目的(1)提高数控系统的控制精度和运行效率,满足不同加工需求;(2)节省人工成本和提高加工效率,从而降低生产成本,提高企业经济效益。
三、研究内容和方法该研究主要包括硬件与软件两方面研究内容。
硬件方面:选用ARM作为主控芯片设计数控系统的嵌入式硬件平台,实现稳定、高效的控制。
主要工作包括将ARM处理器与MCX314数控系统芯片相互连接,构建系统的硬件体系框架,设计数字模拟转换模块,开发电源模块等。
软件方面:主要工作包括编写控制和运行程序,如解析加工指令、实现插补算法、控制机床运动等,并开发系统界面,实现参数编辑、图形界面显示等功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
云台控制系统开题报告篇一:开题报告-网络摄像机云台高毕业设计(论文)开题报告题目网络摄像机云台高精度控制算法与实现学院通信工程学院专业通信工程姓名班级学号指导教师一、综述本课题国内外研究动态,说明选题的依据和意义1、国内云台研究动态:随着社会的发展,视频监控行业在IT行业中逐渐占据一角,同样作为视频监控中摄像机的一部分——云台,也扮演着重要的角色。
云台是一种主要由两个高精度步进电机组成的用于承载镜头的支架,其中一个步进电机负责控制云台水平转动,另一个步进电机用于控制云台的垂直方向转动,从而使摄像机镜头能够在水平360°范围内,垂直180°范围内转动。
带云台的摄像机已占据了视频监控行业的半壁江山,很多厂家都有专门负责云台方面研究的团队。
云台质量的好坏,主要在于预置位的精准度,预置位即是预先设定好一个位置,当需要摄像机镜头重新回到某个位置时候,只要调用预置位。
回到预置位的偏差越小,说明云台的精度越高,做的好的厂家像大华、海康等视频监控厂家云台转动精度能达到0.2°以内,即设定一个预置的位置,云台转动到该位置的偏差不会超过0.2°。
而精度差点的产品精度可能就大于这个值了,现在很多厂家都在致力于云台转动精度问题,主要是预置位的精度,以及如何自动矫正预置位的偏差,目前大部分云台都不带转动偏差校正功能,而市场上有转动偏差校正的云台虽然能在云台出现较大偏差时候进行校正,但是其每次转动的误差会比没有偏差校正的云台误差大,因为校正的过程会引入偏差。
因此,拥有转动偏差校正而且能够将校正误差减小的云台是许多公司的追求。
2、选题依据和意义:云台在球型摄像机中扮演的角色非常重要。
在一些大型场合,比如说大型超市,一般都安装球型摄像机,因为球型摄像机转动灵活,可以快速地转动到某个角度,也可以全场监控,当发现画面中的某个区域有异常情况时候,操作人员可以手动快速移动到那个区域,再利用摄像机镜头变倍功能可进一步查看异常区域。
在一些大些场合,球型摄像机也可以设定几个预置位,然后启动自动巡航,每隔一段时间球型摄像机可以依据云台自动地切换另一个场景或画面,使用非常灵活。
然而在一些大型场合若使用不带云台的摄像机,比如枪型摄像机,其只能查看一个场景,不能切换场景,使用上非常不灵活。
若需要查看几个场景的话,必须使用好几台枪型摄像机,大大的增加了成本及人力管理资源。
由此可见云台在视频监控行业里也是一个重要的模块。
我选择的课题是“网络摄像机云台高精度控制算法与实现”。
选择该课题的目的是为了去研究如何通过软件进一步提高云台预置位的精度。
现在大部分做视频监控的厂家云台控制的电路虽然所使用的控制芯片有所差异,但是其电路基本原理基本上都是类似的,但是有的厂家作出来的云台精度能达到很高,而有些厂家云台精度却是另一个档次,其中最重要的原因就是软件上设计的不好,存在一些缺陷或者说是存在一些转动误差没有克服。
究其根本原因在于视频监控行业起步比较晚,技术上发展水平赶不上国外的一些厂家,特别是软件的算法和编码。
同样,作为视频监控行业的一个模块——云台控制目前在国内没有一个标准的算法或者说是软件架构,大部分厂家都是自主研发的,做的好的厂家软件上的缺陷很少,而精度做的差点的厂家其软件上没能很好的克服转动误差,导致预置位出现偏差。
云台这个模块网上的资料也比较少,百度上最多告诉你云台控制的大致原理,涉及到具体算法或者说软件架构几乎是一片空白。
选择该课题的意义在于提高云台预置位的精度。
现在百度一下就知道一般云台的精度都在0.1~0.2度之间,而云台精度在0.01度左右的几乎没有。
虽然这个硬件有一定关系,但是若是能将云台电机的最小微步数减小到0.01度以下,那么只要软件上算法没有什么缺陷,有希望能将云台的精度精确到0.01度左右。
选择本课题的目的是通过不断学习和实践,通过软件算法克服机械误差,使云台的精度提高到更好的水平。
二、研究的基本内容,拟解决的主要问题:云台控制核心在于云台转动过程中的精度,或者说是到达某个预先设定好的位置的精度。
因此研究的基本内容是如何通过软件算法克服云台机械上的误差,使云台预置位的偏差在0.01°范围左右。
拟解决的问题:1、控制云台转动的步进电机最小微步必须小于0.01°现在很多厂家生产的步进电机,即使是高精度的步进电机,其精度也一般在0.9度/步左右,没有最小步距角在0.01度以下的。
因此必须借助外围电路,拟利用带细分功能的电机驱动芯片来实现驱动和细分电机的每一步,这样云台转动过程中没有抖动现象,再利用软件上的算法对高精度步进电机实现精确微分,克服云台机械上的偏差,使电机的转动的最小步距角能小于0.01度。
2、云台安装好后,设定好预置位后,球机能达到先前设定的预置位。
云台的最重要作用在于能够准确地到达预置位,而不是普通的转动。
因此要实现云台能够准确地到达预置位,就必须借助传感器来实现。
这里拟用光耦为云台建立坐标系,光耦触发主控芯片外部中断,一个光耦用于建立云台水平坐标原点,另一个电机用于云台垂直方向建立坐标系原点。
然后在软件上利用该原点进行一系列的换算,依靠算法建立云台虚拟坐标系,保证设定好的预置位后,云台能够准确地到达该预置位。
3、通信协议的制定要实现对云台的高精度控制,必须要自定义一套通信协议,利用通信协议对云台下发一系列命令,使云台得到很好的控制,通信协议的定义必须考虑复杂度问题,过于复杂的协议云台会花费较多时间解析协议,不利于云台立即响应收到的命令;而过于简单的话会给后期命令的增加造成困难,因此需要一套合适的协议,这里拟用少于13个字节组成的一组数据作为命令的一种格式,具体命令待详细制定4、如何保证通信的可靠性除了拥有通信协议外,还有一个最重要的因素就是通信的可靠性,若云台通信不可靠,则在通信过程中容易出现死机或者说是下发的命令不再被执行,这种情况的出现是非常危险的,像一些工作在监狱里的带云台摄像机,若是不能转动了,产生后果将是十分严重的,所以通信的可靠性在设计时候必须考虑周全。
通信过程中必须保证云台时刻能够接收上层下发的命令,并且及时响应命令,对一些关键命令可以在算法上实现命令缓存,保证关键命令的有效执行5、如何克服机械设计上的误差总所周知,无论什么机械机构,总是存在一定的机械误差的,正如前人所说的“世界上没有两样完全相同的东西”,因此,在软件上必须有克服一定机械因素导致偏差的能力。
比如说电机如何停止,假如在高速而且电机负载较大情况下,上面下发停止命令,算法上必须对电机做保护,让电机先减速再停止,如果过分依赖电机内部结构来停止的话会对电机造成损害,同时也会产生转动偏差。
6、如何测试云台的偏差假如没有一个很好的测量转动偏差的方法,即使云台转动存在偏差,我们也会发现不了,因此必须找出一个很好的办法能有效的检查云台转动存在的任何偏差。
因为目前在视频监控公司实习,所以拟用镜头作为测试偏差的工具。
将镜头固定在云台上,调到最大变倍,通过比较设定预置位时候的图像和回到预置位后的图像,来区别云台转动或者预置位的偏差,若两副图像上的内容偏差很大,说明云台预置位偏差较大,若两副图像肉眼看不出任何偏差,则说明云台精度很高。
三、研究步骤、方法及措施:云台转动高精度实现涉及到软件模块和硬件模块,软件模块主要包括通信模块、电机运动模块两大模块,硬件上包括电机模块、驱动微分模块、传感器模块、主控模块。
通信模块主要包含通信协议制定、命令接收和发送接口、通信可靠性设计。
电机运动模块包括电机细分算法和运动控制算法。
电机模块主要由控制水平方向的电机和控制垂直方向的电机组成。
驱动细分模块包含细分芯片和DA芯片。
传感器模块主要是光耦。
主控模块是以单片机LPC17XX系列中的一款芯片作为主控主要研究步骤和方法如下:1、学习基于Cortex-M3内核的LPC17系列单片机英文手册LPC17XX.PDF,结合实际开发板,熟练掌握LPC17XX系列单片机的定时器模块,外部中断模块,GPIO模块,I2C通信模块,UART串口通信模块,SPI通信模块的使用2、学习DA芯片的英文PDF手册,熟悉DA芯片的功能,主要掌握DA芯片的时序电路,能利用单片机编写时序电路,从而熟练运用DA芯片。
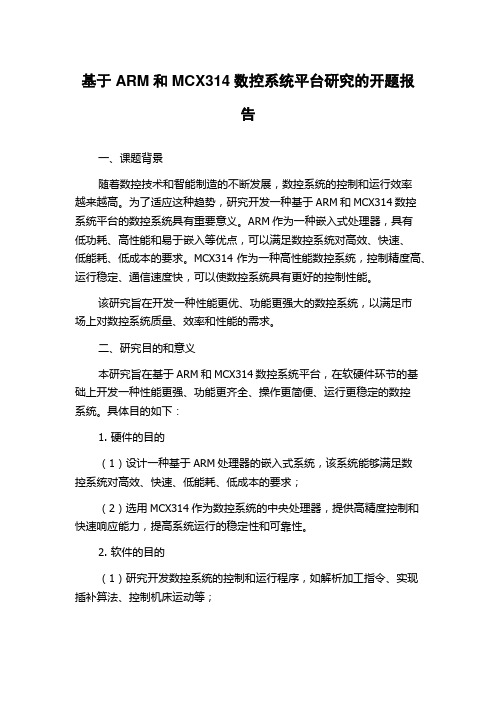
3、学习光耦的工作原理,掌握光耦触发单片机中断的原理4、学习步进电机细分芯片的英文PDF手册,掌握电机细分芯片的功能及其使用方法,主要掌握步进电机细分芯片的时序电路及其使用5、学习步进的电机的基础知识,掌握电机相位方面知识和电机能够被细分的原理,了解电机运动时候相关注意事项主要实现措施:这里云台以基于Cortex-M3内核的单片机LPC1754为主控芯片,LPC1754上拥有的资源较多,这里主要利用其定时器模块、通信模块、外部中断模块、GPIO模块。
1、定时器模块:利用定时器0和定时器1来分别负责控制电机1和电机2,即电机运动程序都在定时器中断程序里运行,保证电机运动时候不受其他因素干扰。
定时器2和定时器3分别负责控制电机1和电机2的加速或者减速,保证电机在负载情况下能够正常启动和停止,不产生失步现象2、通信模块:兼容UART串口通信和 I2C通信,利用UART或者I2C通信对单片机下发命令,或者单片机向其他设备反馈信息。
利用SPI接口与一块DA芯片通信,对DA芯片下发命令,产生模拟电压3、外部中断模块:该中断由光耦产生,在产生中断的时候即将此时的位置信息作为坐标原点,可以利用算法建立坐标系4、GPIO模块:该模块主要与电机细分芯片相连接,软件上通过控制GPIO口的高低状态配合DA芯片来控制电机的平稳运动,图1如下。
图1 软件框架四、研究工作进度:序号时间内容篇二:开题报告参考--智能控制系统的设计本科毕业设计开题报告题目智能控制系统的设计学生姓名学号所在院(系) 物理与电信工程学院专业班级通信1102班指导教师XX年 3月 6 日1234篇三:数控机床控制系统设计开题报告长江师范学院本科毕业设计(论文)开题报告课题名称:专业年级:姓名:学号:指导教师:数控机床的控制系统设计XX级机械设百度文库-让每个人平等地提升自我计制造及其自动化郑达华 XX14261221 赵军教务处制10。