最新云台控制器原理图.pdf
大疆创新 ZENMUSE H3-3D 云台用户手册说明书

1 12
18
17 16
1. 水平方向伺服驱动模块 3. 减震球 5. 俯仰方向伺服驱动模块 7. 相机安装座
©2014 大疆创新 版所有
13 14
15
2. 减震装置上板 4. 减震装置下板 6. 横滚方向伺服驱动模块 8. 8 针线连接线端口(连接 GCU / Phantom2)
6
1.2 安装云台到 Phantom 2
用于固定减震装置上下板。
©2014 大疆创新 版权所有
3
3
配件盒内物品-相机固定件×1
用于将相机固定于相机云台上。
配件盒内物品-螺丝包×1
M2.5x6.3:用于锁紧相机到云台。 M2.5x5:用于锁紧云台到减震装置上。 M3x8(含 M3 螺帽、M3 平垫圈):用于安装减震装置到飞行 器上。
配件盒内物品-云台视频信号线×1
云台舵机控制

云台舵机控制云台舵机控制技术的研究与应用第一章引言1.1 研究背景云台舵机控制技术是指通过舵机来实现云台系统的稳定控制,广泛应用于无人机、摄影、机器人等领域。
随着舵机技术的不断发展和进步,云台舵机控制技术在各个领域中的应用越来越广泛。
1.2 研究目的和意义本文旨在研究云台舵机控制技术的原理、方法与应用,通过对云台舵机的控制实验和数据分析,探讨云台舵机控制技术在各个领域中的应用潜力,为相关行业提供参考和指导。
第二章云台舵机控制的原理与方法2.1 云台舵机的原理介绍云台舵机的基本原理和结构,包括舵机的电路结构、控制器工作原理以及舵机控制信号的产生原理。
2.2 云台舵机的控制方法介绍云台舵机的控制方法,包括手动控制、自动控制以及半自动控制等不同方式。
详细探讨各种方式的优缺点以及适用场景。
2.3 云台舵机控制算法介绍云台舵机控制中常用的算法,包括PID控制算法、模糊控制算法、遗传算法等。
详细讨论各种算法的优缺点,以及在云台舵机控制中的应用情况。
第三章云台舵机控制的实验与结果分析3.1 实验设计详细描述云台舵机控制实验的设计过程,包括实验设备的选取、实验参数的设定以及实验场景的搭建。
3.2 实验结果介绍云台舵机控制实验的结果数据,判断不同控制方法和算法在控制平台稳定性、响应速度以及误差补偿等方面的表现。
3.3 结果分析对实验结果进行详细分析和解读,比较不同控制方法和算法在云台舵机控制方面的优缺点,总结实验数据对云台舵机控制技术的影响。
第四章云台舵机控制技术的应用展望4.1 无人机领域中的应用探讨云台舵机控制技术在无人机领域的应用潜力,包括航拍摄影、灵巧操控等方面。
4.2 摄影领域中的应用探讨云台舵机控制技术在摄影领域的应用潜力,包括稳定拍摄、跟踪拍摄等方面。
4.3 机器人领域中的应用探讨云台舵机控制技术在机器人领域的应用潜力,包括人机交互、辅助操作等方面。
4.4 发展趋势与挑战展望云台舵机控制技术未来的发展趋势和面临的挑战,提出进一步研究的方向和重点。
RS485云台控制学习文档
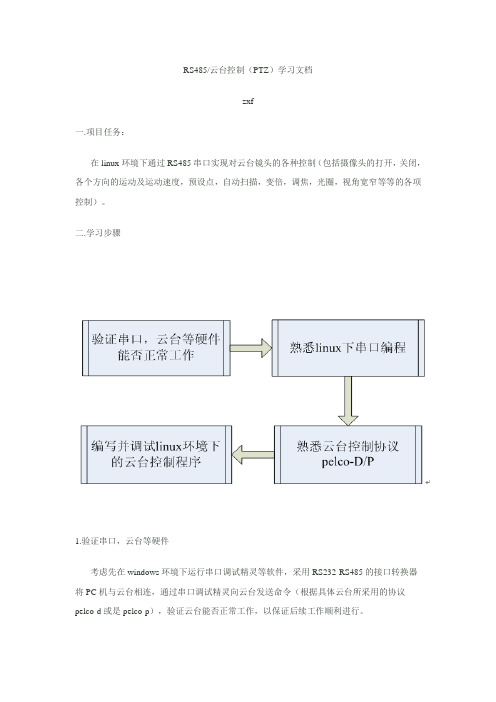
RS485/云台控制(PTZ)学习文档zxf一.项目任务:在linux环境下通过RS485串口实现对云台镜头的各种控制(包括摄像头的打开,关闭,各个方向的运动及运动速度,预设点,自动扫描,变倍,调焦,光圈,视角宽窄等等的各项控制)。
二.学习步骤1.验证串口,云台等硬件考虑先在windows环境下运行串口调试精灵等软件,采用RS232-RS485的接口转换器将PC机与云台相连,通过串口调试精灵向云台发送命令(根据具体云台所采用的协议pelco-d或是pelco-p),验证云台能否正常工作,以保证后续工作顺利进行。
2.熟悉linux下的串口编程串口是电脑上一种很通用设备通信的协议,常用PC机上包含的是RS232规格的串口,当然,除了RS232 ,还有RS485和RS422两种规格,用于不同的设备通信;linux环境下万物皆文件,都是文档,串口是设备文档,配置好后,其他东西就当成文档进行操作。
串口编程中比较重要的是串口的设置,需要配置的部分包括波特率,数据位,停止位,奇偶校验等。
关于linux下串口设置的例子和程序网上有很多,而且基本上内容大同小异。
可以采用如下方法来验证自己在linux下的串口程序:准备PC机两台(一台装Linux系统,另一台装windows即可),用串口线分别和两台计算机的串口相连,在windows机下运行串口调试软件,并打开com1(linux下对应串口ttyS0)等待操作。
在linux机下运行自己的串口程序,注意打开的串口和波特率,校验位等设置要和windows机一致,可以将自己的串口程序运行在接收数据状态,并打印信息,在windows机下用串口调试精灵发送数据,验证在linux机下接受是否正确,同样可以验证发送数据是否正确。
关于串口设置程序:1. 配置波特率:注意每台机器都有输出输入接收信息的速度,所以用cfsetispeed和cfsetospeed来分别设置。
Linux串口设置过程中有一个非常重要的结构体struct termios ,它包括了串口端的任何配置,在termios.h中被定义。
摄像机云台工作其原理分析

摄像机云台工作其原理分析摄像机云台工作其原理分析摄像机云台是承载摄像机进行水平和垂直两个方向转动的装置。
摄像机云台内装两个电动机。
这两个电动机一个负责水平方向的转动,另一个负责垂直方向的转动。
水平转动的角度一般为350?,垂直转动则有45?、35?、75?等等。
水平及垂直转动的角度大小可通过限位开关进行调整。
摄像机云台的分类大致如下:1 室内用摄像机云台及室外用云台室内用云台承重小,没有防雨装置。
室外用云台承重大,有防雨装置。
有些高档的室外云台除有防雨装置外,还有防冻加温装置。
2 承重为适应安装不同的摄像机及防护罩,摄像机云台的承重应是不同的。
应根据选用的网络摄像机及防护罩的总重量来选用合适承重的云台。
室内云台的承重量较小,云台的体积和自重也较小。
室外用云台因为肯定要在它的上面安装带有防护罩(往往还是全天候防护罩)的网络摄像机,所以承重量都较大。
它的体积和自重也较大。
目前出厂的室内云台承重量大约1. 5kg~7kg左右,室外用云台承重量大约为7kg~50kg左右。
还有些云台是微型云台,比如与摄像机一起安装在半球型防护罩内或全天候防护罩内的云台。
3 控制方式一般的摄像机云台均属于有线控制的电动云台。
控制线的输入端有五个,其中一个为电源的公共端,另外四个分为上、下、左、右控制端。
如果将电源的一端接在公共端上,电源的另一端接在“上”时,则云台带动摄像机头向上转,其余类推。
还有的摄像机云台内装继电器等控制电路,这样的云台往往有六个控制输入端。
一个是电源的公共端,另四个是上、下、左、右端,还有一个则是自动转动端。
当电源的一端接在公共端,电源另一端接在“自动”端,云台将带摄像机头按一定的转动速度进行上、下、左、右的自动转动。
在电源供电电压方面,目前常见的有交流24V和220V两种。
云台的耗电功率,一般是承重量小的功耗小,承重量大的功耗大。
目前,还有直流6V供电的室内用小型云台,可在其内部安装电池,并用红外遥控器进行遥控。
云台电机开环控制原理

云台电机开环控制原理【摘要】本文主要介绍了云台电机开环控制原理。
首先从概述入手,详细解释了云台电机开环控制的工作原理,包括控制方法和实现过程。
接着分析了开环控制的优点,如简单、实时性好等,以及缺点,如对环境扰动敏感等。
然后通过实际案例展示了云台电机开环控制在各种场景中的应用,并探讨了未来的发展趋势。
最后总结了云台电机开环控制原理的重要性和作用。
通过本文的阐述,读者可以更好地了解云台电机开环控制的原理和特点,以及在实际应用中的价值和意义。
【关键词】云台电机、开环控制、原理、优点、缺点、应用案例、发展趋势、总结、概述、详解1. 引言1.1 云台电机开环控制原理概述云台电机开环控制是一种常见的控制方法,它通过对电机的输入信号进行简单的调节,来实现对电机的控制。
在开环控制中,控制器不会监测或反馈电机的实际位置或状态,而是通过事先设定的控制信号,直接控制电机的运动。
云台电机开环控制原理基于控制器发送的指令信号直接驱动电机运动,不需要进行位置或速度的反馈调整。
这种简单直接的控制方式可以快速实现对电机的控制,适用于一些对精度要求不高的应用场景。
虽然云台电机开环控制具有简单、高效的特点,但也存在着一些不足之处。
由于没有反馈信息,容易受到外部环境或负载变化的影响,导致控制精度较低。
在实际应用中需要根据具体情况选择适合的控制方式。
在接下来的文章中,我们将详细探讨云台电机开环控制的原理、优点、缺点、应用案例以及发展趋势,希望能为读者提供更深入的了解和参考。
2. 正文2.1 云台电机开环控制原理详解开环控制是一种基本的控制方式,它通过输入和输出之间的关系来实现系统稳定性和性能的要求。
云台电机开环控制原理是指在不考虑系统内部状态的情况下,通过输入电流控制输出电机转速的一种方法。
云台电机开环控制原理的实现需要通过数学模型来描述系统的动态特性。
通过建立系统的数学模型,可以分析系统的稳定性和性能指标,从而确定最优的控制策略。
云台电机开环控制还涉及到控制器的设计和调节。
揭秘智能控制云台主控与驱动电路 —电路图天天读(170)

揭秘智能控制云台主控与驱动电路—电路图天天读(170)云台一般分两类,一类是做高速运转的球形摄像机,价格昂贵;另一类是以两个交流或直流电机组成的安装平台,通过控制系统在远端可以控制其水平和垂直方向的转动,实现全方位监控,这样的云台控制起来费时费力,不节能。
为此,在做一定的市场调研后,结合已有技术设计出一款基于单片机智能控制的云台。
该云台能根据设防区域内安装的多个传感器采集的信息去控制由步进电机组成的云台转动,只要入侵者进入设防区域云台就工作,人移动超过一定的距离,电机就转带动摄像头转动,始终保持人在监控摄像头的视角范围中心区域。
整个工作过程全智能化,无需人操作,且步进电机易于控制转动度数,转动精确,可实现全方位准确监控摄像,使用方便节能。
系统组成该智能控制云台系统主要由人体红外传感器、主控芯片、驱动电路、四相步进电机组成,框图如图1所示。
在该系统中,多个传感器以云台为中心组成多点信号监测电路,采集云台四周(设计为八个方向,每个方向为45°的扇形区域)的多点数据,输入主控芯片进行数据计算处理,主控芯片再输出一定数量的脉冲给步进电机驱动电路,从而驱动步进电机带动摄像头转动一定的角度,实现全方位自动追踪监控。
主控芯片与驱动电路AT89C52是Atmel公司生产的低电压,高性能CMOS微处理器,片内带8 KB的可反复擦写只读程序存储器,共有4个八位I/O接口,功能强大。
L298N($2.1300)是SGS 半导体公司生产的步进电机专用控制芯片,能产生四相控制信号,输出功率强,可用于控制两相、三相和四相步进电机,易于与单片机结合,实现单片机控制。
设计中以AT89C52为主控芯片,在软件的配合下用P0,P1口作为传感器信号输入口,扫描多点(设计为16点,也可视具体情况扩展)红外传感器的监测信息,信息经运算处理后,通过P2口输出脉冲给L298N组成的电机驱动电路来驱动电机转动一定的角度,从而带动云台上的摄像头转动一定角度(水平方向为45°的倍数,最小45°,最大315°;竖直方向为15°的倍数,最小15°,最大75°,可通过软件修改),实现自动控制。
云台控制器的软件设计
摘要近年来,视频监控得到了迅速发展,其应用范围越来越广。
为扩大监控范围,改善监控视野,可以借助于云台,即把摄像机装在云台上,通过云台转动带动摄像机旋转,同时可以控制摄像机镜头的参数。
云台在监控系统中起着关键的作用,它直接反映监控系统的监控指标。
本文设计了一种基于AT89C52单片机的电动云台控制器。
该控制器能够接收控制台的控制命令,控制云台的垂直运动和水平运动,以及摄像机的聚焦/散焦,变倍近远、光圈变力小,以调整摄像机的视野.本文在介绍课题的应用背景的基础上,重点分析了云台所具备的功能,并针对这些功能提出了本设计的实现方案。
在软件程序设计中,简要介绍了串行通讯的基本知识和详细说明了应用于云台中的通讯协议PELCO-D和PELCO-P等协议,并在此基础上设计了各部分的软件流程图。
最后阐述了本设计所采用的有关软件可靠性方面的措施。
通过调试、系统的实际运行,验证了本设计运行稳定,实现了云台的上下左右旋转,实现了对镜头聚焦、变倍、光圈的控制。
达到了预期的应用目标。
关键词:云台,协议,监控系统,解码器前言云台控制器是视频监控系统中重要的前端控制设备,它接收中心控制设备发送的串行编码信号,通过软件解码后驱动不同的硬件电路,以控制云台、镜头、辅助照明灯光、雨刷等操作,能方便地跟踪被监控目标。
中心控制设备可以是视频矩阵切换器、控制键盘、多媒体计算机、数字视频录像机(DVR)等,中心控制设备和云台控制器之间一般通过串行RS-485接口进行通信。
随着单片机和大规模集成电路技术的发展,解码器也逐渐由独立设备向模块化发展,尤其是在智能球形摄像机中应用得更普遍。
目前视频监控行业还没有建立统一的中心控制设备与前端控制设备之间的通信控制协议标准,各个厂商都使用各自的通信控制协议,这些协议互不兼容,常用的通信控制协议有PELCO-D,PELCO-P PANASONIC,PHILIPS,SAMSUNG,RM110,CCR-20G,AB,AD,DALLES,KALATEL, KRE-301, VICON , ORX-10, YAAN, HY , ALEC,KONY等。
云台控制装置的制作技术
本技术提供一种云台控制装置,采用ARM9架构的高性能S3C2410嵌入式控制器为核心结合WIFI无线通信等技术进行设计,由嵌入式应用电路(1)、WIFI无线通信芯片(2)、液晶触摸屏模块(3)、GPRS模块(4)、单片机控制器(5)、WIFI无线通信芯片(6)、步进电机模块(7)、振动检测模块(8)共同组成,通过液晶触摸屏虚拟出云台上、下、左、右调节四个功能键,使用WIFI无线通信芯片实现云台控制指令传输;根据云台控制指令驱动步进电机转动从而实现云台上、下、左、右调节;当检测到振动信号将通过GPRS模块向管理者手机报警;装置具有实用性强、操控简单、功能强大等显著特点。
技术要求1.一种云台控制装置,由嵌入式应用电路(1)、WIFI无线通信芯片(2)、液晶触摸屏模块(3)、GPRS模块(4)、单片机控制器(5)、WIFI无线通信芯片(6)、步进电机模块(7)、振动检测模块(8)共同组成,其特征在于:a).由S3C2410嵌入式控制器、两片K4X1G163PC-FGC6存储器接成2Gb容量的SDRAM、一片K9GAG08U0E-S存储器接成16Gb容量的NAND Flash 构成嵌入式应用电路(1),由88W8686芯片构成WIFI无线通信芯片(2),由AT070TN83V1模块构成液晶触摸屏模块(3),由M23模块构成GPRS模块(4),由AT89S51单片机构成单片机控制器(5),由88W8686芯片构成WIFI无线通信芯片(6),由两块THB6128步进电机驱动芯片、两个42BYGHW609步进电机构成步进电机模块(7),由MMA7660FC模块构成振动检测模块(8);b).S3C2410嵌入式控制器的LCD控制接口、数据接口分别接AT070TN83V1模块的控制端口、数据端口,虚拟出云台上、下、左、右调节四个功能键;c).S3C2410嵌入式控制器的MISO、MOSI、CLK、ENT2、NSS0端口分别接WIFI无线通信芯片(2)的SDO、SDI、CLK、SINTN、CS端口,AT89S51单片机构的RXD、TXD、T1、/INT0、P1.0端口分别接WIFI无线通信芯片(6)的SDO、SDI、CLK、SINTN、CS端口,实现指令传输;d).AT89S51单片机的P2.0-P2.7端口接两块THB6128步进电机驱动芯片的输入端口,两块THB6128步进电机驱动芯片的输出端口驱动两个42BYGHW609步进电机,实现云台上、下、左、右调节;e).AT89S51单片机构的/INT1端口接MMA7660FC模块的第五端口,实现振动信号检测,S3C2410嵌入式控制器的RXD1、TXD1端口分别接M23模块的TXD、RXD端口,当检测到振动信号将通过M23模块向管理者手机报警。
PTZ DOME CONTROLER云台控制器说明书
一、安装485接口A、B对应485控制信号+、-.连接485端到PTZ DOME 485线缆。
连接12V直流电源到POWER端。
开启电源后,控制器屏幕显示A001或P001.A意思是命令地址,001是地址码。
P意思是预设点,001为预设值。
二、如何控制PTZ。
当按下CAM按钮,屏显A001,首字母A意思是地址,其他3个数字是地址码为1,你可以在A字符后按下数字键输入数值。
若数值大于9,按键C可以删除最后一位输入的数字,当设置地址1为Pelco-D协议时,此为Pelco-D ID地址,意为Pelco-D地址为1,当设置地址1为Pelco-P 协议时,此数字+1为Pelco-P ID地址,意为Pelco-P ID地址为2。
(有些装置使用协议地址,有些装置使用ID地址)当按下SHUT键,屏幕显示P002。
首位P意为预设点,其他3位数字002意为地址数为2,你可以与地址数字相同的方式输入预设数字。
输入预设数字后,监控探头取得选择的预设点。
当按下SPEED键,屏幕显示S-63,首位S意为速度数,其他2位数字63意为速度值为63.可以与设置预设地址一样输入预设数字,速度值为云台(pan tilt)速度,从1至63。
(63为最快速度)当按下HOME键,屏幕显示HONE,意为预设归航点(home point),可以使用PRESET(预设),DELELT(应为DELETE删除)设置或者清除该点。
当按下A或B键,屏幕显示LT-A或LT-B,意为预设限制点A或限制点B,可以作为自动模式的左止点或右止点。
可以利用PRESET,DELETE设置或者清除该点。
当按下PRESET键3秒钟,屏幕显示SET-,意为预设模式,若需要设置一个预设值,需要按下PRESET键3秒,控制器显示SET-,此时可以输入一个数字(此时也可按下HOME A B键设置起始点与左右限制点),若须输入一个大于10的数字,可以首先按下-/--键。
输入数字后,须按ENTER键确认。
云台校准的原理和应用
云台校准的原理和应用1. 引言随着技术的不断发展,云台校准在机器视觉、无人驾驶、航天等领域中扮演着重要的角色。
本文将介绍云台校准的原理和应用,帮助读者了解云台校准的基本概念和工作原理。
2. 云台校准的基本概念云台校准是指通过对云台控制系统进行调整,使云台能够准确地追踪和跟踪目标。
云台校准通常包括两个方面:姿态校准和位置校准。
2.1 姿态校准姿态校准是指调整云台的姿态角度,使其与参考坐标系保持一致。
常用的姿态校准方法包括基于陀螺仪和加速度计的校准、基于电子罗盘的校准等。
2.2 位置校准位置校准是指调整云台的位置,使其能够准确地对准目标。
位置校准通常需要借助计算机视觉或者传感器等技术,通过分析目标的特征和运动轨迹来实现。
3. 云台校准的工作原理云台校准的工作原理通常涉及到传感器、控制器和执行器等组件的协同工作。
3.1 传感器云台校准中使用的传感器通常包括陀螺仪、加速度计、电子罗盘等。
陀螺仪可以测量云台的角速度,加速度计可以测量云台的加速度,而电子罗盘可以测量云台的方向。
3.2 控制器控制器是云台校准的核心组件,用于接收传感器的数据并进行处理。
控制器可以根据传感器数据来判断云台的姿态和位置,然后通过调整云台的姿态和位置来实现校准。
3.3 执行器执行器是控制云台姿态和位置的设备,通常包括电机、伺服控制器等。
通过控制执行器的工作状态,可以调整云台的姿态和位置。
4. 云台校准的应用云台校准在很多领域都有广泛的应用。
4.1 机器视觉在机器视觉领域,云台校准可以用于摄像头的自动校准。
通过使用云台校准技术,摄像头可以自动调整姿态和位置,以获得最佳的观察角度和画面质量。
4.2 无人驾驶云台校准在无人驾驶领域也有着重要的应用。
无人驾驶车辆通常需要使用多个摄像头来感知周围环境,通过进行云台校准可以确保摄像头的准确定位和跟踪。
4.3 航天在航天领域,云台校准可以用于卫星定位和追踪。
通过对卫星上的云台进行校准,可以实现卫星的高精度定位和目标跟踪,提高航天任务的成功率。