二自由度简易云台增稳控制系统设计
二自由度云台控制系统设计及控制方法的研究

第6期(总第223期)2020年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672 6413(2020)06 0021 04櫜二自由度云台控制系统设计及控制方法的研究赵 炯,谢正东,周奇才,熊肖磊(同济大学机械与能源工程学院,上海 201804)摘要:针对二自由度云台稳定控制的问题,提出一种二自由度云台控制系统设计方案,并采用系统辨识的方法对系统控制关键环节进行辨识并建立系统模型,辨识环节的模型检验拟合程度达到95%以上。
在系统模型基础上设计了双闭环控制器,经过参数整定和仿真测试,应用到实际的二自由度云台的实验平台上,在遥控模式、定位模式等模式下验证了云台稳定控制性能,并结合云台搭载的摄像头进行了云台跟踪实验。
实验证明:云台在两个自由度上均能在较短过渡时间内达到目标角度,稳态误差在±5%以内,说明针对系统辨识模型设计的双闭环控制器可靠有效。
关键词:二自由度云台;控制系统;控制方法中图分类号:TP391.7∶TP273 文献标识码:櫜A工信部2017年智能制造综合标准化与新模式应用项目收稿日期:2020 09 13;修订日期:2020 11 06作者简介:赵炯(1963),男,江苏苏州人,副教授,博士,博士生导师,主要从事计算机网络、操作系统和智能控制技术方面的研究。
0 引言云台在实际应用中主要起到稳定设备的作用,根据所搭载设备的需要,云台既可以安装在固定平台上也可以安装在移动平台上[1],在监控安防[2 3]、机器人[4 5]、无人机[6]等许多领域都需要二自由度云台的稳定控制。
如机器人伺服控制和军事装备控制等应用场景对于二自由度云台的控制提出了较高的要求,能够实现快速响应并能进行目标稳定跟踪的云台有着较高的应用价值。
本文设计了一种二自由度云台控制方案,基于二自由度云台实验平台,采用系统辨识构建控制模型,进行了串级双环控制器的设计和仿真,最后将控制方法应用到实验平台上进行了遥控实验和定位实验,实现了云台的稳定控制,并与视觉识别相结合,进行了目标跟踪实验。
二自由度机械臂控制系统的设计与实现

fuzzy language description system which can not only describe the application system's quantitative model
but also Call describe its qualitative model.Therefore fuzzy logic can be adapted to any complicated object
With the rapid development of modem scientific technology,control object,controller and control
tasks&goal are becoming more and more complicated.The classical control theory based on precise modeling and numerical calculation is facing many new problems such as the rapid increase of computing
more on the robustness,real-time performance,faulty·tolerance capacity,self-adaptability of the control
parameter than the precision of contr01.Also,with the controlled industrial process being more and more
complexity,the more and more difficulty of precise modeling,multi-input&diversification of input information and nonlinear system contr01.Therefore the modem control theory based on state space
二自由度云台原理

二自由度云台原理云台是一种能够实现自由旋转的装置,常用于机器人、航空航天、摄影和导航等领域。
其中,二自由度云台是指可以在水平方向和垂直方向上进行旋转的云台。
本文将介绍二自由度云台的工作原理及其应用。
二自由度云台的工作原理是基于两个旋转轴的运动,其中一个轴用于水平旋转,另一个轴用于垂直旋转。
这两个轴的旋转可以通过电机、伺服机构或步进电机等方式实现。
云台上安装有传感器和控制系统,用于感知和控制云台的运动。
在二自由度云台中,水平旋转轴通常被称为横摆轴,垂直旋转轴通常被称为俯仰轴。
横摆轴和俯仰轴的旋转可以分别控制云台的水平和垂直方向上的视角。
例如,在机器人领域,二自由度云台可以用于携带摄像头,实现机器人的视觉感知和目标跟踪。
二自由度云台的应用非常广泛。
在航空航天领域,二自由度云台可以用于航天器的姿态控制,以保持航天器的稳定性。
在摄影领域,二自由度云台可以用于相机的稳定拍摄,使拍摄的画面更加清晰和稳定。
在导航领域,二自由度云台可以用于车辆的视觉导航,帮助车辆感知周围环境并做出相应的决策。
二自由度云台的控制方法有多种,常见的方法包括开环控制和闭环控制。
开环控制是指根据预先设定的旋转参数控制云台的旋转,但无法实时感知云台的实际旋转情况。
闭环控制是指通过传感器感知云台的旋转角度,然后根据目标旋转角度进行控制,以实现更精确的控制效果。
在实际应用中,二自由度云台的设计和控制需要考虑多个因素。
首先是云台的稳定性和精度,云台需要能够稳定地旋转,并能够准确地控制旋转角度。
其次是云台的载荷能力,云台需要能够承受相应的载荷,并保持稳定。
此外,云台的控制系统需要具备较高的实时性和可靠性,以满足实际应用的需求。
二自由度云台是一种能够实现水平和垂直旋转的装置,广泛应用于机器人、航空航天、摄影和导航等领域。
通过合理的设计和控制,二自由度云台可以实现稳定的旋转和精确的控制,为各种应用提供了重要的支持和保障。
第六章增稳与控制增稳系统_2
指令模型
k
q e Δq引起的 惯性加速度
c
w
耦合作用
纵向高度通道气动模型及高度控制增稳系统
Δq引起的 惯性加速度 q e
耦合作用
u
Zuw
Z qw Zw Zw e
操 纵 杆
杆系 串联 舵机
阻尼
w Zw
H0
1 s
c
助力器 自动倾斜器
Z
w c
r r Nvr v Nr N r N p p Nrr r Nra a Nrr r
纵向俯仰通道气动模型及俯仰控制增稳系统
耦合作用
w
c
M q c
速度静稳定
M uq
操 纵 杆
杆 系 串联 舵机 助力器
M (S )
指令模型
kr
k
增稳与控制增稳系统工作原理
机械稳定装置
贝尔稳定杆,洛克希德稳定杆,杭尼韦尔稳定杆 适用小型及跷跷板式旋翼直升机 稳定裕量有限,不能在全飞行包线内提供 稳定杆及其联动装置增加旋翼阻力 姿态角速率及角位移反馈,增加直升机阻尼力矩及稳定(恢 复)力矩
电子反馈增稳及
速度稳定性
Yvv
v
1 s
Y0
1 s
a
L a
p
p p 1 1
s
阻尼
s
Y
v
v
Y
Y
权限限制
p LP
Yrv
kp
杆位移传感器
Y pv
p
Yv Yv Yv a r
M (S )
一种两自由度运动平台控制系统设计
Ab t a t A t o d g e f re o p a o m h c a e l epth n n o i gmoin i i t d c d T ec n rl y t sr c : w e r eo e d m lt r w i c n ra i i i ga d r l n t r u e . h o t s m f f h z c l o sn o os e
由 度运动平台 控制系
赵新通 - 韩俊伟 何景峰 郑淑涛 , , ,
(. 尔滨理工大学 , 1哈 黑龙江 哈 尔滨 10 8 ;. 尔滨工业 大学, 50 02 哈 黑龙江 哈 尔滨 10 0 ) 50 6
摘
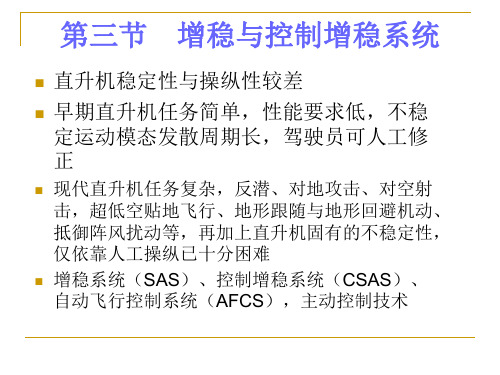
要 : 出一种 两 自由度运动平 台以实现俯仰和横滚运动。测控 系统采 用多级控制方式 , 提 上级计算机与 下级
1 平台运动机构
图 1 运动系统及机构简化图
提高测量精度 。
两 自由度运动平 台结 构如图 1 所示 ,其 由固定 底 座、 运动平 台和阀控液压缸组成 , 运动平 台和液 压缸之 间, 以及液压缸 与底座之 间采用 球铰连接 , 台和底座 平 支撑之间采用十字铰连接。由于上述各铰 的约束 , 系统
计算机之 间通过 以太 网进行通讯 ; 驱动 系统采 用非对称 阀控制 非对称液压缸 , 用动压反馈校正 的方法提 高系统 利
阻尼 比 , 而改善 系统的非 线性特性 。 从
关键 词 : 动 平 台 ; 压 伺 服 系统 ; 制 系统 运 液 控
中图分 类号 :P 7 . T 23 5
文献标识码 : A
由于平 台采用三 点支撑 , 在用于质心测 试时 , 以大大 可
收稿 日期 :0 8 0 一 7 2 0— 4 O
a69_二自由度云台控制器设计方案

电子工业出版社《EDA应用技术》编制王真富
« » ___
项目8二自由度云台控制器设计方案
任务描述
用FPGA最小系统板设计控制器,实现对二自由度舵机云台的精确控制, 设计要求: 在Quartus II 13. 0软件平台上,用VHDL程序设计矩阵式键 盘控制电路、数码 管动态显示电路、舵机控制电路;用ModelSimAltera 10. 5b仿真软件仿真检查设 计结果;选用FPGA最小系统板、2自 由度舵机云台、矩阵式键盘、数码管等硬件资源 进行硬件验证。
A<HZZk
BCHZZF
C 0—1 h
DE O0-~C~IZ卜F
FO-CZIG0—
PO-CD
300
FPGA的输入输出引脚资源。 所谓
动态扫描是指每个数码管不 是一
直显示, 而是每隔一定时间 显示一 次, 只要间隔时间足够短, 由于人 眼的视觉暂留现象, 在视 觉上是一 直显示的。动态扫描数
码管的原理图, 如图8. 5所示。
PWM控制信号要求可知, 脉宽度计数器长度cnt=25000+nX [(2X106)/1801/20, 其中n值为
旋转的角度值。部分脉冲宽度与舵机转动角度及脉宽度计数器长度的关系如 表8. 2所示,
其它角度可根据脉宽与角度改变呈线性变化计算。
表S.2脉冲宽度与舵机转动角度及脉宽度计数器长度的关系
转动角度 0 45 90 135 ISO
电子工业出版社《EDA应用技术》编制王真富
A
X ©公
t
23 A
5|! 61,1 曰1
1L
8Il曰J F E |l
°;
C| | . □f
*
dM |
ITTTII
无人机云台稳定系统研究与控制算法设计

无人机云台稳定系统研究与控制算法设计无人机是一种主要通过无线电通信遥控或内置自主控制计算机飞行的飞行器,其广泛应用于民用和军事领域。
无人机在近年来迅速发展,使得已经初具规模的无人机市场成为了人们关注的热点话题。
然而,随着无人机技术的迅速发展,无人机云台稳定系统研究与控制算法设计也逐渐成为了无人机研究的核心问题之一。
一、无人机云台稳定系统研究1. 云台结构云台是无人机载荷运输和精确控制的关键部分,稳定性是云台的最基本要求。
从机械结构的角度来看,云台主要由云台控制器、切向式电机、云台支撑构架、旋翼舵机以及传感器组成。
旋翼舵机的重点在于云台的摆动,包括俯仰、横滚和偏航运动。
切向式电机负责控制云台的旋转方向,传感器则是获取无人机姿态变化的数据以便调整控制系统。
2. 控制系统控制系统也是无人机云台稳定系统的重要组成部分,以选择嵌入式系统作为云台的控制核心。
嵌入式系统自带高速处理器芯片,能够进行较为复杂的控制算法设计,同时也能进行数据采集和通信。
嵌入式系统不仅具有较高的计算速度和实时性,还能够应对不同运动场景下的运动轨迹,确保云台的稳定性。
控制算法方面的设计主要包括几种基本的优化控制方法,如PID控制和LQR控制。
二、控制算法设计1. PID控制PID控制全称为比例积分微分控制,是一种传统的控制算法,在工业控制中广泛应用。
PID控制按照误差的比例、积分、微分三个参数对功率进行控制,以达到稳定控制目的。
其中,比例环节是误差和控制结果的比例,积分环节是误差和控制位置的累计,微分环节是上次误差和上次控制结果的差。
PID控制方法具有计算简单、易于调整、实用性高的特点,常用于稳定运动系统。
2. LQR控制LQR控制全称为线性二次调节控制,是一种优化控制方法。
LQR控制不仅具有PID控制算法的特点,还能够优化系统的状态控制。
LQR控制利用最小二乘法以及状态控制理论,对误差进行优化控制。
通过调整状态的权重矩阵,不断求解控制器矩阵,优化控制系统的状态。
二自由度管道机器人摄像云台系统设计
A b s t r a c t : C a me r a p a n - t i l t s y s t e m s f o r r o b o t i c a p p l i c a t i o n s i n t h e p i p e l i n e i s i n t r o d u c e d a n d p r o p o s e s a 2 - D O F C a m e r a p 帆一 t i l t s y s t e m w i t h e l a b o r ti a n gt h e¥ o f t w o l ' e a n d h a r d w a r e d e s i g n o ft h e s y s t e m . T h e 8 9 C 5 1 s i u s e d∞ t h e m st a e r c ^ ,T h e C C D
摘
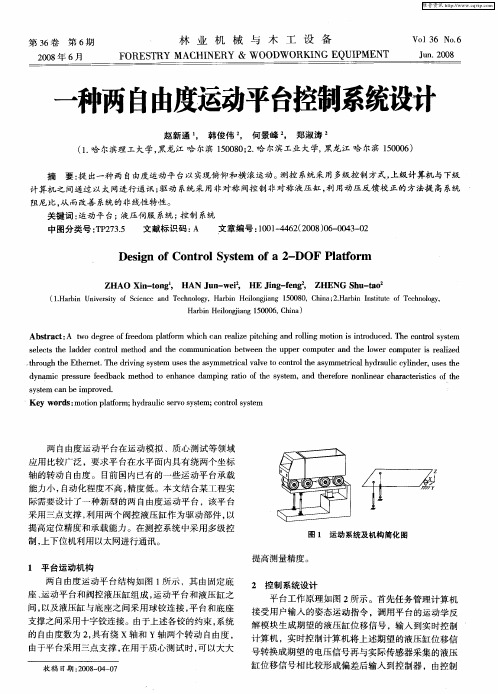
要: 介绍摄像云 台系统在 管道机 器人上应 用的状况 , 提 出了一种二 自由度摄像 云台系统 , 详 细阐述 了该 系统的软件
和硬件设计。 本设计选用 8 9 C 5 1 作为主控芯片 , C C D图像传 感器作为图像采集装置 , 直流减速 电机作为执行机构 , 使 用同 步带轮和 电机轴直接 输 出的方式代替一般 的齿轮传动 , 硬件 电路 实现对 云台的控制 、 检测和 限位 , 各 关节位置加入 密封
( 1 . B e i j i n g U n i v e r s i t y o f P o s t s a n d T e l e c o m mu n i c a t i o n s , A u t o m a t i o n S c h o o l , B e i j i n g 1 0 0 8 7 6 , C h i n a ; 2 . I n t e l l i g e n t R o b o t s o f A e r o s p a c e S c i e n c e A n d I n d u s t r y C o . , L t d . , B e i j i n g 1 0 0 0 7 4 , C h i n a )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二自由度简易云台增稳控制系统设计
项目简介:本课题要求学生在查阅相关资料的基础上,利用单片机、IMU姿态测量元件、舵机等设备搭建二自由度增稳控制平台,设计姿态数据的读取程序,设计舵机的控制程序,设计增稳平台的机械结构,对所设计的程序进行调试,实现云台的增稳控制。
项目方案:
本课题分以下步骤展开研究:
2014年4月~ 2014年10月
收集有单片机接口程序设计方面的资料,学习相关理论知识;
2014年11月~2014年12月
学习MWC飞行控制板的程序设计技术;
2015年1月~2015年4月
设计板载姿态传感器数据读取;
2015年5月~ 2015年8月
设计舵机控制程序和平台机械结构,测试平台增稳性能;
2015年9月~2015年10月
撰写研究报告、结题,项目鉴定。
本项目主要使用MWC飞行控制板和舵机实现二自由度平台的增稳控制
预期成果:
本项目要求完成如下成果:
设计并实现二自由度增稳平台的软、硬件系统,搭建增稳平台的机械结构,完成系统的负载测试。
完成研究报告一份。
二自由度云台概述:
云台是一种安装、固定摄像装置的支撑设备,用于摄像装置与支撑物的联结。
其英文名称为Pan-Tilt(简称PT),即可以在水平方向和俯仰方向旋转的机械装置。
主要用于安装监控、动态摄像等需要进行运动图像(视频)捕捉的场合或环境,使采集方式更直接方便;在需要摇摆和摆动的机构中,如机械臂等,也利用云台来实现可接触范围的延伸和扩展。
根据云台的回转特点可以分为只能左右旋转的水平旋转平台和既能左右旋转又能上下旋转的全方位云台,即二自由度(2-Degree of Freedom)云台,简称2-DOF云台。
增稳的意义:
比如飞行器在飞行过程中,由于自身的抖动以及外界因素对它的影响,它的姿态不断变化,装在上面的图像采集装置一起变化,导致图像的不稳定。
如果采用反馈控制原理,先测量姿态变化,再传输到控制装置(舵机),达到稳像的目的。
将一个二自由度的稳像平台与遥控直升机恰当地结合在一起,实现了在飞行过程中跟踪目标稳定图像,保持图像质量的功能。
平台增稳
平台增稳是将全部的光学系统和敏感元件安装在一个用环架系统悬挂起来的台体上.并用陀螺等惯性传感器安装于台体上,形成陀螺稳定平台。
根据环架系统稳定轴的数量,可分为单轴.两轴和三轴稳定平台。
当环架的支承轴无任何干扰力矩作用时,平台将相对惯性空间始终保持在原来的方位上.当平台因干扰力矩作用而偏离原来的方位时.陀螺敏感平台变化的姿态角或角速率反馈到控制核心,经过一系列算法处理.送出控制量给环架的力矩电机.通过力矩电机产生补偿力矩对干扰力矩进行补偿,从而使平台保持稳定.而平台的稳定也就保证了其上的光学系统的视轴的稳定,即视轴的稳定是通过对整个台体的稳定来实现的,目前来看平台增稳是最有效,最实际的方案。
用Arduino编辑MWC程序,MWC是用PID算法进
行飞行稳定性控制的程序,三个字母分别代表比例(P)-积分(I)-微分(D)。
用FIDI工具把程序上传到飞控板,FIDI是一种USB转TTL电平的信号转换工具。
稳定控制算法
在工程实际中.应用最为广泛的调节器控制规律为比例、积分、微分控制.简称PID控制。
它以其结构简单、稳定性好、工作可靠、调整方便而成为自动控制的主要技术之一。
当被控对象的结构和参数不能完全掌握.或得不到精确的数学模型时.控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定.这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象.或不能通过有效的测量手段来获得系统参数时.最适合用PID 控制技术。
PID控制.实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。