“控制工程基础”大作业
最新《控制工程基础》习题集及答案

《控制工程基础》习题集及答案第一部分:单选题1.自动控制系统的反馈环节中必须具有[ b ]a.给定元件 b .检测元件c .放大元件d .执行元件2. 在直流电动机的电枢回路中,以电流为输出,电压为输入,两者之间的传递函数是[ a ]a .比例环节b .积分环节c .惯性环节d .微分环节3. 如果系统不稳定,则系统 [ a ]a.不能工作 b .可以工作,但稳态误差很大c .可以工作,但过渡过程时间很长d .可以正常工作4. 在转速、电流双闭环调速系统中,速度调节器通常采用[ B ]调节器。
a .比例b .比例积分c .比例微分d .比例积分微分5.单位阶跃函数1(t)的拉氏变换式L[1(t)]为[ B ]:a .S b. S 1 c. 21Sd. S 2 6. 在直流电动机的电枢回路中,以电流为输出,电压为输入,两者之间的传递函数是[ A ]A .比例环节B .积分环节C .惯性环节D .微分环节7.如果系统不稳定,则系统 [ A ]A. 不能工作 B.可以工作,但稳态误差很大C.可以工作,但过渡过程时间很长 D.可以正常工作8. 已知串联校正网络(最小相位环节)的渐近对数幅频特性如下图所示。
试判断该环节的相位特性是[ A ]:A.相位超前B.相位滞后[ B ]调节器。
A.比例 B.比例积分C.比例微分 D.比例积分微分10. 已知某环节的幅相频率特性曲线如下图所示,试判定它是何种环A.相位超前 B. 相位滞后C. 相位滞后-超前D. 相位超前-滞后12. 开环增益K 增加,系统的稳定性( c ):A .变好 B. 变坏 C. 不变 D. 不一定13. 开环传递函数的积分环节v 增加,系统的稳定性( ):A .变好 B. 变坏 C. 不变 D. 不一定14. 已知 f(t)=0.5t+1,其L[f(t)]=( c ):A .S+0.5S 2 B. 0.5S 2 C. S S1212 D. S 21 15.自动控制系统的反馈环节中必须具有( b ):A.给定元件 B .检测元件C .放大元件D .执行元件16.PD 调节器是一种( a )校正装置。
《控制工程基础》题集

《控制工程基础》题集一、选择题(每题5分,共50分)1.在控制系统中,被控对象是指:A. 控制器B. 被控制的设备或过程C. 执行器D. 传感器2.下列哪一项不是开环控制系统的特点?A. 结构简单B. 成本低C. 精度低D. 抗干扰能力强3.PID控制器中的“I”代表:A. 比例B. 积分C. 微分D. 增益4.下列哪种控制系统属于线性定常系统?A. 系统参数随时间变化的系统B. 系统输出与输入成正比的系统C. 系统输出与输入的平方成正比的系统D. 系统参数随温度变化的系统5.在阶跃响应中,上升时间是指:A. 输出从0上升到稳态值的时间B. 输出从10%上升到90%稳态值所需的时间C. 输出从5%上升到95%稳态值所需的时间D. 输出达到稳态值的时间6.下列哪种方法常用于控制系统的稳定性分析?A. 时域分析法B. 频域分析法C. 代数法D. A和B都是7.在频率响应中,相位裕度是指:A. 系统增益裕度对应的相位角B. 系统相位角为-180°时的增益裕度C. 系统开环频率响应相角曲线穿越-180°线时的增益与实际增益之差D. 系统闭环频率响应相角曲线穿越-180°线时的增益8.下列哪种控制策略常用于高精度位置控制?A. PID控制B. 前馈控制C. 反馈控制D. 最优控制9.在控制系统的设计中,鲁棒性是指:A. 系统对参数变化的敏感性B. 系统对外部干扰的抵抗能力C. 系统的稳定性D. 系统的快速性10.下列哪项不是现代控制理论的特点?A. 基于状态空间描述B. 主要研究单变量系统C. 适用于非线性系统D. 适用于时变系统二、填空题(每题5分,共50分)1.控制系统的基本组成包括控制器、和。
2.在PID控制中,比例作用主要用于提高系统的______,积分作用主要用于消除系统的______,微分作用主要用于改善系统的______。
3.线性系统的传递函数一般形式为G(s) = ______ / ______。
《控制工程基础》练习题及答案
《控制工程基础》练习题及答案1. 单选题1. 作为控制系统,一般()。
A. 开环不振荡B. 闭环不振荡C. 开环一定振荡D. 闭环一定振荡正确答案:A2. 串联相位滞后校正通常用于()。
A. 提高系统的快速性B. 提高系统的稳态精度C. 减少系统的阻尼D. 减少系统的固有频率正确答案:B3. 下列串联校正装置的传递函数中,能在频率ωc=4处提供最大相位超前角的是()。
A. (4s+1)/(s+1)B. (s+1)/(4s+1)C. (0.1s+1)/(0.625s+1)D. (0.625s+1)/(0.1s+1)正确答案:D4. 利用乃奎斯特稳定性判据判断系统的稳定性时,Z=P-N中的Z表示意义为()。
A. 开环传递函数零点在S左半平面的个数B. 开环传递函数零点在S右半平面的个数C. 闭环传递函数零点在S右半平面的个数D. 闭环特征方程的根在S右半平面的个数正确答案:D5. 某环节的传递函数为G(s)=Ts+1,它是()。
A. 积分环节B. 微分环节C. 一阶积分环节D. 一阶微分环节正确答案:D6. 单位反馈控制系统的开环传递函数为G(s)=4/s(s+5) ,则系统在r(t)=2t输入作用下,其稳态误差为()。
A. 10/4B. 5/4C. 4/5D. 0正确答案:A7. 已知系统的开环传递函数为100/S2(0.1S+1)(5S+4),则系统的开环增益以及型次为()。
A. 25,Ⅱ型B. 100,Ⅱ型C. 100,Ⅰ型D. 25,O型正确答案:A8. 控制论的中心思想是()。
A. 一门即与技术科学又与基础科学紧密联系的边缘科学B. 通过信息的传递、加工处理和反馈来进行控制C. 抓住一切通讯和控制系统所共有的特点D. 对生产力的发展、生产率的提高具有重大影响正确答案:B9. 反馈控制系统是指系统中有()。
A. 反馈回路B. 惯性环节C. 积分环节D. PID调节器正确答案:A10. 下面因素中,与系统稳态误差无关的是()。
《控制工程基础》课程作业习题(含解答)
第一章概论本章要求学生了解控制系统的基本概念、研究对象及任务,了解系统的信息传递、反馈和反馈控制的概念及控制系统的分类,开环控制与闭环控制的区别;闭环控制系统的基本原理和组成环节。
学会将简单系统原理图抽象成职能方块图。
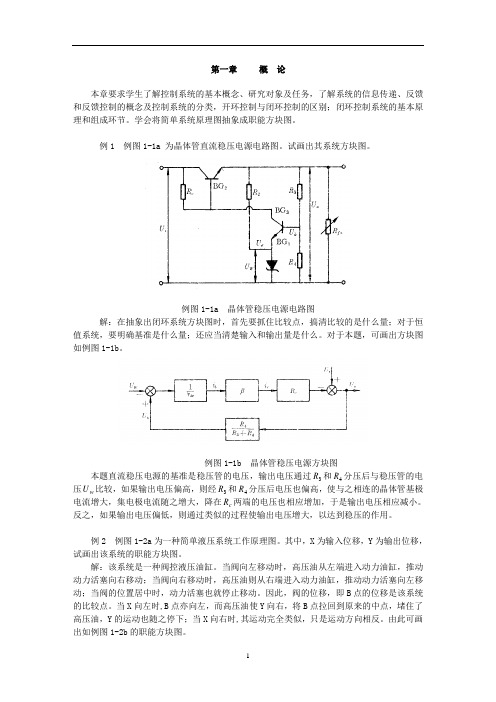
例1 例图1-1a 为晶体管直流稳压电源电路图。
试画出其系统方块图。
例图1-1a 晶体管稳压电源电路图解:在抽象出闭环系统方块图时,首先要抓住比较点,搞清比较的是什么量;对于恒值系统,要明确基准是什么量;还应当清楚输入和输出量是什么。
对于本题,可画出方块图如例图1-1b。
例图1-1b 晶体管稳压电源方块图本题直流稳压电源的基准是稳压管的电压,输出电压通过R和4R分压后与稳压管的电3压U比较,如果输出电压偏高,则经3R和4R分压后电压也偏高,使与之相连的晶体管基极w电流增大,集电极电流随之增大,降在R两端的电压也相应增加,于是输出电压相应减小。
c反之,如果输出电压偏低,则通过类似的过程使输出电压增大,以达到稳压的作用。
例2 例图1-2a为一种简单液压系统工作原理图。
其中,X为输入位移,Y为输出位移,试画出该系统的职能方块图。
解:该系统是一种阀控液压油缸。
当阀向左移动时,高压油从左端进入动力油缸,推动动力活塞向右移动;当阀向右移动时,高压油则从右端进入动力油缸,推动动力活塞向左移动;当阀的位置居中时,动力活塞也就停止移动。
因此,阀的位移,即B点的位移是该系统的比较点。
当X向左时,B点亦向左,而高压油使Y向右,将B点拉回到原来的中点,堵住了高压油,Y的运动也随之停下;当X向右时,其运动完全类似,只是运动方向相反。
由此可画出如例图1-2b的职能方块图。
例图1-2a 简单液压系统例图1-2b 职能方块图1.在给出的几种答案里,选择出正确的答案。
(1)以同等精度元件组成的开环系统和闭环系统,其精度比较为_______ (A )开环高; (B )闭环高; (C )相差不多; (D )一样高。
(2)系统的输出信号对控制作用的影响 (A )开环有; (B )闭环有; (C )都没有; (D )都有。
大工15秋《机械控制工程基础》在线作业1满分答案
大工15秋《机械控制工程基础》在线作业1满分答案大工15秋《机械控制工程基础》在线作业1一、单选题(共10道试题,共60分。
)1.系统的截止频率越大则()A.上升时间越小B.上升时间越大C.稳态误差越小D.快速性越好正确答案:A2.下面系统各环节的连接方式不对的是()A.串联连接B.并联连接C.反馈连接D.混合连接正确答案:D3.XXX图上以原点为圆心的单位圆对应于伯德图上面的()A. 5dB线B. 3dB线C. 1dB线D. 10dB线正确答案:C4.某二阶系统阻尼比为2,那么系统阶跃响应是()A.等幅振荡B.单调衰减C.振荡衰减D.振荡发散正确答案:B5.单位负反馈的开环传递函数为G(s),则其闭环系统的前向传递函数与()A.反馈传递函数相同B.闭环传递函数相同C.误差传递函数相同D.开环传递函数相同精确答案:D6.求线性定常系统的传递函数条件是()A.稳定条件B.零初始前提C.稳态前提D.瞬态前提正确答案:B7.控制框图的等效变换原则是变换前后()A.输入量和反馈量保持不变B.输出量和反馈量保持不变C.输入量和干扰量保持不变D.输入量和输出量坚持不变精确答案:D8.下面基本函数的传递函数不包括()A.积分环节B.一阶微分环节C.扩大环节D.延时环节精确答案:C9.一般开环控制系统是()A.不稳定系统B.时域体系C.频域体系D.稳定系统精确答案:D10.微分环节是高通率坡起,将使系统()A.增大干扰误差B.减小干扰误差C.增大阶跃输入误差D.减小阶跃输入误差精确答案:A大工15秋《机械控制工程基础》在线作业1二、多选题(共5道试题,共20分。
)1.有关频率特性,下面说法正确的有()A.能够看出幅值和相位随着频率变化 B.对数频率特性图是通用形式之一 C.对数幅相特性图是通用形式之一D.无法判断精确答案:ABC2.体系的误差可以分为()A.稳态误差B.瞬态误差C.动态误差D.静态误差精确答案:AC3.频率特性不包括()A.幅频特性B.延迟特性C.相频特性D.脉冲特性精确答案:BD4.允许误差的百分比通常取()A. ±5%B. ±2%C. ±20%D. ±15%正确答案:AB5.可以表征体系动态特性的有()A.频率特性B.惯性特性C.微分方程D.积分方程正确答案:ACD大工15秋《机械控制工程基础》在线作业1三、判断题(共5道试题,共20分。
控制工程基础试卷及答案
课程名称: 自动控制理论 (A/B 卷 闭卷)一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 ,其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
控制工程基础C作业2017
《控制工程基础C》作业——适用于测控技术与仪器专业(48学时,含6学时实验)说明:以胡寿松主编《自动控制理论简明教程》为教材,习题的页码以该教材为准。
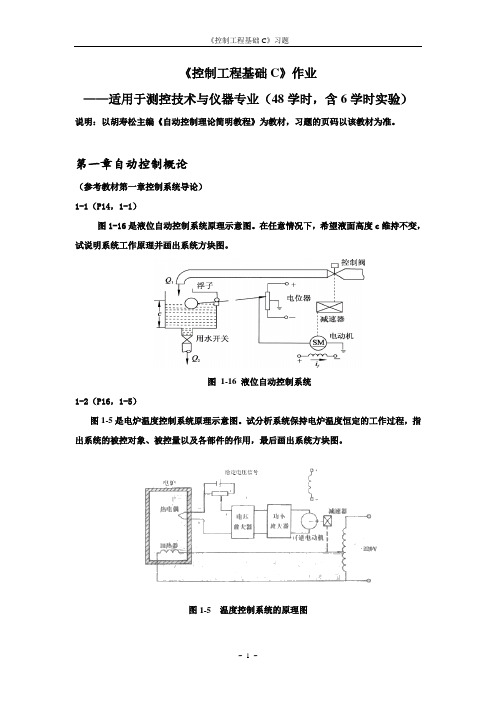
第一章自动控制概论(参考教材第一章控制系统导论)1-1(P14,1-1)图1-16是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。
图1-16 液位自动控制系统1-2(P16,1-5)图1-5是电炉温度控制系统原理示意图。
试分析系统保持电炉温度恒定的工作过程,指出系统的被控对象、被控量以及各部件的作用,最后画出系统方块图。
图1-5 温度控制系统的原理图第二章 控制系统的数学模型(参考教材第二章控制系统的数学模型) 2-1(P81,2-5)设弹簧特性由下式描述:F=12.65y 1.1,其中,F 是弹簧力;y 是变形位移。
若弹簧在形变位移0.25附近作微小变化,试推导Δy 的线性化方程。
2-2(P81,2-7)设系统传递函数为:2()2()32C s R s s s =++,且初始条件 (0)1(0)0c c =-=, 。
试求阶跃输入r (t )=1(t )时,系统的输出响应c (t )。
2-3(P81,2-8)如图,已知G(s)和H(s)两方框相对应的微分方程分别是:()610()20()dc t c t e t dt += ()205()10()db t b t c t dt+=且初始条件均为零,试求传递函数C(s)/R(s)及E(s)/R(s)。
2-4(P82,2-11(a )(b )(c ))已知控制系统结构图如图所示。
试通过结构图等效变换求系统传递函数C(s)/R(s)。
(a )(b )(c )2-5(p82,2-12(a ))试简化图中的系统结构图,并求系统传递函数C(s)/R(s)和C(s)/R(s)。
()N s2-6(p83,2-15(b )、(c ))试用梅森增益公式求图中各系统信号流图的传递函数C(s)/R(s)。
控制工程基础大作业
控制工程基础(B )大作业
一、 查阅相关资料,撰写读书报告
通过广泛的资料查阅,以论文形式就控制领域发展状况提交相关读书报告,以培养学生文献检索和阅读能力。
要求:至少阅读5篇2005年以后的文献资料,并在上交时附上相应的参考文献或网址,阅读报告的字数不得少于3000汉字。
二、 应用Matlab 软件绘制Nyquist 图及Bode 图
1、 自己从教材上的例题或者课后作业中选择一个系统,绘制其Bode 图。
2、 已知系统的开环传递函数为)
10)(5(100)(++=s s s k s G ,用Matlab 分别绘制k=1,8,20时系统Nyquist 图,并判断系统的稳定性。
试分析k 对系统稳定性的影响。
三、 控制系统典型环节性能分析
熟悉Matlab 软件Simulink 的基本使用方法,利用Simulink 建立各典型环节的仿真模型,并通过仿真得到各典型环节的单位阶跃响应曲线,给出各典型环节相关参数变化对典型环节动态性能的影响。
附:本课程成绩评定方法
考勤、课堂表现、平时作业、实验报告、大作业及期末考试相结合,其中:考勤、课堂表现、平时作业与实验报告占20%,大作业占30%,期末考试成绩占50%。
大作业以报告形式撰写,由各班长(或者学习委员)负责收齐打印稿和电子文档,并于6月14日上交,其中电子文档以班为单位打包后发送至邮箱: salarejiang@ 。
任课教师:江 丽
2012年4月。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“控制工程基础”工程训练大作业 ————直流电机转速控制
直流电动机是一种将直流电能转换成机械能的装置。
由于其带有机械换向器,较比交流电动机结构复杂,生产运行成本较高,并有逐步被交流电动机所取缔。
但是由于直流电动机具有启动转矩大,调速范围宽等优势,在轧钢机、电力机车的等方面有一定的应用。
1. 直流电动机数学模型(以他激式直流电动机为例分析直流电动机数学模型):
Ld
Rd
·电枢回路的微分方程式:
d d d d d d u dt
di
L R i e =++
·机械运动方程
e
d m m d C u n dt dn
T dt n d T T =++22
·已知某直流电动机调速系统,控制系统主回路与直流电动机的主要参数如下:
·计算得到此直流电动机的相关参数: 电势常数:
)/(185.01000
05
.07002201-⋅=⨯-=-=
mim r V n R I U C nom a nom nom e
电动机: 主回路:
负载及电动机转动惯量: kW
P nom 150=min
/1000r n nom =A
I nom 700=Ω
=05.0a R Ω
=08.0d R mH L d 2=6
=m 2
2
120m kg GD
⋅=全控桥式整流
转矩常数:
mA kg C C e M .18.003.1185.003.1===
电磁时间常数:
s R L T d d d 025.008.01023
=⨯==-
机电时间常数:
s C C R GD T e m d m 77.0185.018.037508.01203752=⨯⨯⨯==
直流电动机数学模型的传递函数表达形式:
1
77.0019.041.5177.077.0025.0185.0111)(2
22++=++⨯=++==
s s s s s T s T T C X X s W m m d e r c 6
.52417
.284177.0019.041.5)(2
2++=++==
s s s s s W
2. 直流电动机转速控制系统分析 · 自学MATLAB 软件;
· 在MATLAB 软件平台上,以单位阶跃信号为系统的参考信号,应用时域分
析法或频域分析法对直流电动机速度控制系统进行一系列分析,分析其动、稳态性能、稳定性等;
· 直流电动机速度控制系统的动、稳态性能、稳定性等分析应该借助于MATLAB 软件平台用图形进行分析。
3. 提交电脑打印的说明书一份。
4. 最后成绩占期末总成绩的6%。
【组合方案】
⑴ I nom =650、660A 、670A 、680A 、690A 、700A 、710A 、720A 、730A 、740A 、
750A 、760A 、770A ⑵ GD 2=105kg.m 2、110 kg.m 2、115 kg.m 2、120 kg.m 2、125 kg.m 2、130 kg.m 2、135 kg.m 2、140 kg.m 2、145 kg.m 2、150 kg.m 2
组合方案: A I nom 700=
22120m kg GD ⋅= 时域分析:
6
.52417
.284177.0019.041.5)(22++=
++==
s s s s s W
1.在单位阶跃信号下响应 num=[284.7]; den=[1 41 5
2.6]; step (num,den) grid
2 动,稳态分析:
上升时间: 1.79s 峰值时间:3.21s 稳定时间:5.42s
此系统为过阻尼系统
3 稳定性
den=[1 41 52.6];
roots(den)
计算结果
ans=
-38.7723
-1.2277
由计算结果可知,该系统有两个闭环系统,且均有负实部,故系统稳定。
num=[284.7];
den=[1 41 52.6];
[p,z]=pzmap(num,den);
pzmap(num,den);
title(‘pole-zero Map’);
hold on;
频域分析:
num[284.7];
den=[1 41 52.6]
margin(num,den)
grid
该系统相位裕量为91.3度,幅值穿越频率为6.45rad/dec,故系统稳定。