TLD算法原理及应用实例
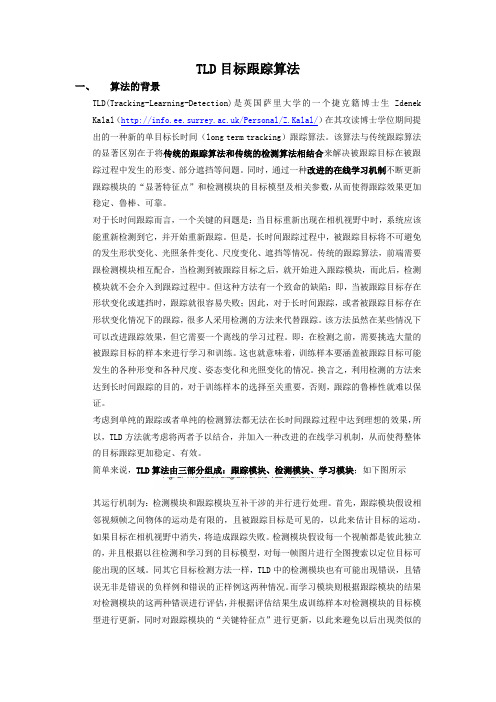
TLD跟踪算法图文流程

计算与输入的bounding box 的重叠度并且将本位置和本 尺度的扫描窗口存入grid中
(2)计算输入帧的积分图像并且给各个变量分配空间,其中 grid.size()是第一步中产生的所有的扫描窗口的个数。 计算积分图像需要用到iisum.create()与iisqsum.create()两个函数。 (3)初始化样本产生器generator并且通过计算扫描窗口与 bounding box的重叠度得到最初始的分类good boxes与bad boxes。 generator的作用此时被定义为仿射变换,仿射变换即线性变换+平 移。 getOverlappingBoxes函数功能:根据输入的bounding box在整帧图 像中寻找与该box最相似的num_closest_init个扫描窗口,然后把这 些窗口归入good_boxes中,同时把重叠度小于0.2的窗口归入 bad_boxes中。 (4)初始化分类器
按步长移动扫描窗口,进而遍历整个视频帧
bbox.y = y;
bbox.width = width; bbox.height = height; bbox.overlap = bbOverlap(bbox,BoundingBox(box));
bbox.sidx = sc;
grid.push_back(bbox); } } sc++; } }
{ const float SHIFT = 0.1; const float SCALES[] = {0.16151,0.19381,0.23257,0.27908,0.33490,0.40188,0.48225, 0.57870,0.69444,0.83333,1,1.20000,1.44000,1.72800, 2.07360,2.48832,2.98598,3.58318,4.29982,5.15978,6.19174}; int width, height, min_bb_side; BoundingBox bbox; Size scale; int sc=0; for (int s=0;s<21;s++) { width = round(box.width*SCALES[s]); height = round(box.height*SCALES[s]); min_bb_side = min(height,width);
TLD目标跟踪算法
TLD目标跟踪算法一、算法的背景TLD(Tracking-Learning-Detection)是英国萨里大学的一个捷克籍博士生Zdenek出的一种新的单目标长时间(long term tracking)跟踪算法。
该算法与传统跟踪算法的显著区别在于将传统的跟踪算法和传统的检测算法相结合来解决被跟踪目标在被跟踪过程中发生的形变、部分遮挡等问题。
同时,通过一种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的目标模型及相关参数,从而使得跟踪效果更加稳定、鲁棒、可靠。
对于长时间跟踪而言,一个关键的问题是:当目标重新出现在相机视野中时,系统应该能重新检测到它,并开始重新跟踪。
但是,长时间跟踪过程中,被跟踪目标将不可避免的发生形状变化、光照条件变化、尺度变化、遮挡等情况。
传统的跟踪算法,前端需要跟检测模块相互配合,当检测到被跟踪目标之后,就开始进入跟踪模块,而此后,检测模块就不会介入到跟踪过程中。
但这种方法有一个致命的缺陷:即,当被跟踪目标存在形状变化或遮挡时,跟踪就很容易失败;因此,对于长时间跟踪,或者被跟踪目标存在形状变化情况下的跟踪,很多人采用检测的方法来代替跟踪。
该方法虽然在某些情况下可以改进跟踪效果,但它需要一个离线的学习过程。
即:在检测之前,需要挑选大量的被跟踪目标的样本来进行学习和训练。
这也就意味着,训练样本要涵盖被跟踪目标可能发生的各种形变和各种尺度、姿态变化和光照变化的情况。
换言之,利用检测的方法来达到长时间跟踪的目的,对于训练样本的选择至关重要,否则,跟踪的鲁棒性就难以保证。
考虑到单纯的跟踪或者单纯的检测算法都无法在长时间跟踪过程中达到理想的效果,所以,TLD方法就考虑将两者予以结合,并加入一种改进的在线学习机制,从而使得整体的目标跟踪更加稳定、有效。
简单来说,TLD算法由三部分组成:跟踪模块、检测模块、学习模块;如下图所示其运行机制为:检测模块和跟踪模块互补干涉的并行进行处理。
TLD目标跟踪算法

TLD目标跟踪算法TLD(Track Learning Detection)是一种目标跟踪算法,它结合了目标跟踪和目标检测的方法,能够在复杂环境中跟踪目标并检测目标的丢失。
TLD算法的核心思想是结合在线学习和离线学习的方法,通过检测器(detector)来检测目标,并通过跟踪器(tracker)来跟踪目标。
在在线学习阶段,检测器会进行训练,学习目标的外观特征和形状信息。
而在跟踪阶段,跟踪器会根据检测器的输出来进行目标的跟踪,同时根据跟踪结果反馈给检测器,进行修正。
TLD算法的具体步骤如下:1. 首先,通过一个强分类器进行目标检测。
这个强分类器使用了Haar特征和Adaboost算法进行训练,能够在图像中快速定位目标。
2.检测到目标后,根据目标的位置和尺度信息,将目标裁剪出来作为正样本,并提取其外观特征,包括颜色、纹理等。
3.同时,从目标附近随机选择一些负样本,并提取其外观特征。
这些负样本一般是与目标外观相似的背景区域。
4. 然后,使用一个在线集成学习器(Online Ensemble Learning)来学习目标的外观特征。
这个学习器使用了随机决策的方法,通过多个弱分类器的投票来进行目标的分类。
5.在跟踪阶段,通过跟踪器来进行目标的跟踪。
跟踪器使用了一个模板,通过计算目标与模板的相似度来判断目标的位置。
6.如果跟踪器发生目标丢失,即目标与模板的相似度低于一个阈值,那么就需要重新进行目标检测。
7.在进行目标检测时,使用之前训练得到的检测器,来对图像进行目标检测。
同时,根据跟踪器的输出结果,对检测器进行修正,从而提高检测的准确率。
TLD算法的优点是能够在复杂环境中进行目标跟踪,并且能够适应目标的外观变化。
它通过结合目标检测和目标跟踪的方法,能够在目标丢失时及时进行目标检测,从而提高了跟踪的准确率和稳定性。
然而,TLD算法也有一些缺点。
首先,由于在跟踪阶段是基于目标检测结果来进行跟踪的,所以在目标遮挡或者快速移动时容易出现跟踪失败。
塔式起重机机器视觉监控系统
塔式起重机机器视觉监控系统摘要:为解决各类建筑施工现场塔机运行过程中的安全问题,设计了一套基于视觉传感技术的智能视频监控系统。
根据实际需要,在嵌入式平台上配合图像传感器和视觉跟踪TLD算法,实现了对塔机吊臂运动轨迹的追踪定位、判断和预警。
测试结果表明:系统的检测率和正确率均能达到95 %以上。
关键词:塔式起重机;机器视觉;TLD算法;图像传感器引言塔式起重机存在着碰撞等一系列安全隐患。
鉴于塔机使用的普遍性以及潜在的事故可能性,国外学者做出了许多相关研究,塔机区域控制和防碰撞系统也相继出现:新加坡的TAC-3000塔机防碰撞、区域保护系统通过32位CPU实现了128 bit的数据加密算法,用于实现塔机之间的数据无线交互;日本大林组开发了基于GPS传感器的3台塔机防碰撞系统;德国的Liebherr、法国的Potain等公司也通过引入激光、超声等先进传感器技术实现了对塔机运行状态更加精确的测量。
国内产品大多基于传统传感设备或安装复杂,或功能简单、智能化不足,基于计算机视觉、图像传感器测量技术的快速发展,本文提出了一种基于视觉传感技术的安全监控系统,为塔机吊臂的运行范围划定一片“安全区域”,即“电子围栏”,通过在嵌入式平台上运行TLD视觉跟踪算法,对图像传感器采集到的视频、图形的关键信息进行分析处理,实现对塔臂运动轨迹的追踪定位、判断和预警,保障塔机安全作业的顺利进行。
1 系统概述1.1 系统总体框架设计系统总体框架如图1,其中:1)图像采集模块:负责采集塔机视频画面,输入至运算处理模块;2)运算处理模块:进行机器视觉智能算法识别运算和处理;3)用户界面:经运算处理模块识别和处理的数据输出并呈现给用户,同时该模块也负责接受用户输入;4)软件部分又包括任务管理和线程管理等环节。
1.2 系统功能模块传统的视频监控系统均是基于PC或服务器平台,在本设计中,结合其应用现场性强的特点,提出了嵌入式塔机智能视频监控平台,将显示和控制部分用嵌入式软硬件的方式实现,并包含智能机器视觉的模块,形成一套“智能黑盒子”迷你系统。
一种基于TLD改进的视觉跟踪算法

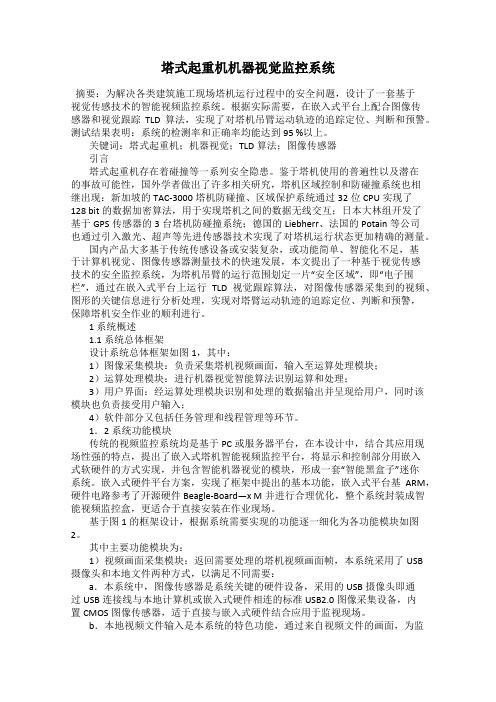
同时运行 , 估计 目标的位置。在线学 习模型不断的 更新检测器和跟踪器的数据 , 同时跟踪器和检测器
也将 得 到 的数 据反 馈 给 在 线学 习模 型 , 验 证 数 据 的 精 确性 , 使 得 到 的 目标 特 征 更 加 精 确 , 其 三 者 相 互 作用, 将得 到 的数 据 整 合 , 最 终 确 定 下 一 帧 中 目标
第一作 者简介 : 程立英 ( 1 9 7 6 一) , 女, 讲师 , 博 士研究生 。研究方 向:
图1 T L D算法 流程示 意图
计算机视觉 , 图像处理 。E — m a i l : c l y p z b @1 6 3 . c o m。
9期
程立英 , 等: 一种基 于 T L D改进的视觉跟踪算法
跟踪
● 1
更新踱踪器
顷 帧
l
I
-
整
△
口
千
I
—
薪 测 器l
t
’
2 0 1 2年 l 1月 9日收到
国家 自然科学基金 ( 6 1 2 0 1 3 7 8 ) 、
检测器
中央高校基础科研基金 ( N l 1 0 8 0 4 0 0 5 ) 资助
标遮挡等特殊问题 , 给视觉跟踪带来 困难。单纯地
跟踪 或者 单 纯 地 检 测 算 法 都 无 法 在 长 时 间 跟 踪 过 程 中达 到 理 想 的 效 果 。而 作 为 当 前 新 颖 的 T L D l 4
( T r a c k i n g — L e a r n i n g - D e t e c t i o n , 跟踪 . 学 习. 检测 ) 视 觉
TLD管理的流程及实例分析

TLD管理的流程及实例分析企业实施D/TLD管理的流程及实例分析引言随着中国汽车行业一系列法律、法规的颁布和实施,给汽车制造商及其供应商的质量管理工作带来巨大压力的同时,也带来进一步完善质量管理的机遇。
对于汽车制造厂商来说,生产的汽车必须满足法律、法规的强制要求。
为了促使供应商采取足够的措施来保证产品质量,以避免损害(如禁止销售、违约罚款),大众汽车集团从法律框架出发,将相关要求细化、扩展至生命攸关的零部件上。
即汽车制造厂商的供应商也需要提供相关的证据资料,以避免供应商和汽车制造厂商因自身过失责任(产品责任)而造成的损害。
1 D/TLD管理要求1.1 相关概念“D”是德文存档责任件(Dokumentationspfli-cht)的第一个字母。
D/TLD零件:有存档责任的零件,如座椅、安全带和轮胎等。
D特性:有存档责任的特性,如扭矩、阻燃性和透光率等。
D特性的本质是特殊特性,包括涉及满足法律法规要求的、影响安全的产品特性(如前挡风玻璃透光率),以及相关制造过程参数(如座椅骨架座盆和靠背螺栓连接拧紧扭矩)。
D特性来源一方面是由顾客指定的产品特性和过程特性,包括政府法规和安全特性,另一方面是供应商根据长期对产品开发和生产积累的丰富经验,识别和挑选出来的产品特性和过程特性。
1.2 管理要求D/TLD管理是大众汽车集团对供应商质量管理的重要要求。
在发生损害情况和/或大众汽车集团要求下,供应商必须证明自己在防止产品出现缺陷方面已采取了足够的措施。
大众汽车集团要求供应商对其生产的每一个D/TLD零件,进行系统化的证据资料存档管理工作。
主要要求如下:(1)供应商必须确保存档资料涵盖所有D/TLD零部件和所有D 特性。
(2)供应商有义务根据自身对产品开发和生产过程中积累的丰富经验,主动识别和列举出在大众汽车集团要求以外的D/TLD零件及D特性。
(3)供应商D/TLD资料至少存档15年,且大众汽车集团保留随时审查的权利。
建筑结构振动控制技术考核试卷
10.以下哪些是隔震技术的主要目标?()
A.减少地震作用下的结构响应
B.防止结构产生共振
C.提高结构的自振频率
D.降低结构的阻尼比
11.建筑结构振动控制中的混合控制策略可能包括以下哪些组合?()
A.主动控制与被动控制
B.隔震与减震
C.结构控制与非结构控制
D.预防性控制与修复性控制
A.传感器技术
B.无人机监测
C.结构健康监测系统
D.人工巡检
15.建筑结构振动控制中的模态分析主要包括以下哪些内容?()
A.振型分析
B.阻尼分析
C.动力特性分析
D.地震响应分析
16.以下哪些因素会影响建筑结构振动控制系统的设计?()
A.建筑物用途
B.建筑物地理位置
C.建筑物结构类型
D.建筑物成本预算
15.以下哪种材料常用于建筑结构振动控制的摩擦阻尼器?()
A.钢材
B.橡胶
C.铅
D.水泥
16.在调谐质量阻尼器(TMD)的设计中,质量比通常定义为多少?()
A.质量与结构总质量的比值
B.质量与结构基础质量的比值
C.质量与结构顶部质量的比值
D.质量与结构底部质量的比值
17.以下哪种现象可能导致建筑结构振动控制系统的失效?()
17.建筑结构振动控制技术中,被动控制系统的优点包括哪些?()
A.不需要外部能源
B.成本较低
C.维护简单
D.控制效果稳定
18.以下哪些控制算法可以用于建筑结构振动控制?()
A.线性二次型最优控制算法
B.模糊控制算法
C.遗传算法
D. PID控制算法
19.建筑结构振动控制中,隔震技术主要包括以下哪些类型?()
李景云3中子反照率个人剂量计

第16卷第3期(总第93期)辐射防护通讯1996年6月・综 述・中子反照率个人剂量计李景云(中国原子能科学研究院,北京,102413)1 引言前面的文章〔1〕已对中子个人剂量监测做了较全面的介绍。
从发展的观点看,作为记录个人剂量计,热释光/径迹蚀刻(T LD/T ED)组合剂量计或带辐射体的径迹蚀刻剂量计有着明显的优势。
气泡剂量计以其灵敏度高也很具吸引力。
但是反照率个人剂量计由于发展比较成熟还是广泛的应用着。
实际上,这方面的研究也在继续,如最近有人利用6LiF和7LiF三明治型反照率剂量计探测n、C混合物中子剂量〔2〕等。
作为反照率剂量计的探测元件现在已不再使用核径迹乳胶,大都使用T LD,主要是LiF 片子。
而且随着LiF敏化片LiF(M g,T i,M)和LiF(M g,Cu,P)片的出现,反照率剂量计的灵敏度也有较大提高,一般做到探测下限0.1mSv问题不大。
如果能解决径迹蚀刻记录和读出自动化问题。
使用带辐射体的径迹蚀刻探测器代替T LD探测器,反照率剂量计的灵敏度会有更大提高。
TLD反照率剂量计的优点是造价低、易读,可以大量使用,所以目前仍有不少国家作为指定中子个人剂量计使用〔3〕,包括德国、英国和巴西等国家。
本文就T LD反照率个人剂量计的原理、设计和刻度问题作些介绍。
2 原理简介反照率中子个人剂量计的原理〔4,5〕是利用热中子探测器探测经人体慢化反射回来的中子,探测器可以是胶片、TLD,甚至径迹蚀刻探测器。
T LD剂量计主要是利用6LiF和7LiF对探测器中的6Li的6Li(n,A)3H反应探测中子。
由于6Li和7Li同时对光子灵敏,而7Li对中子不灵敏,这样由7Li和6Li的响应差扣除光子剂量而得到中子剂量。
设想一对6Li和7Li探测器放在已知剂量当量H p,n(10)的中子辐射场中[H p,n(10)可以用多球技术或组织等效正比计数器测定],则TLD探测器的中子剂量当量响应为:R H,n=M/H p,n(1)其中,M为T LD读出仪对剂量计的反照中子剂量读数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.3 P-N学习
• P-N学习的主要思想就是检测器的错误能够被 两种类型的约束标识出。 • P-expert的作用是发现目标的新的外观(形 变),并以此来增加正样本的数量,从而使得 检测模块更具鲁棒性。 • N-expert的作用是生成负的训练样本。N-expert 的前提假设是:(被跟踪的)前景目标仅可能 出现在视频帧中的一个位置,因此,如果前景 目标的位置时确定的,那么其周围必然是负样 本。
1 TLD概述
TLD可以解决的问题:
极其复杂的视频,比如跟踪失败的情况经常发 生的视频,目标经常丢失的视频 如果前后的视频帧中没有包含很相关的信息, 比如说目标物体发生了严重形变,检测器的效 果也从不会被弱化 实时运作
1 TLD概述
tra jec tor y
学习 (Learning)
2.3 P-N LEARNING
• 这一部分介绍TLD算法的学习模块,学习模块(learning)通过对视频 的在线处理来提升检测器(detector )的性能。在每一帧里,我们希 望评估当前的检测器,发现它产生的错误(identify its errors),不断 更新检测器以避免将来它再次犯错。PN学习的关键思想是检测器产生 的错误结果可以被“P专家”和“N专家”发现和识别。P专家识别假 的负样本,N专家识别假的正样本。当然P专家和N专家本身也会犯错。 然而,P专家和N专家是相互独立的,它们可以相互弥补对方发生的错 误。P专家发生的错误,N专家纠正,反之亦然。
s ion ect det
fra gm ent s
of
n ini tra gd ata
跟踪 (Tracking)
re-initialization
检测 (Detection)
目标状态 (object state)
跟踪(tracking)
更新跟踪器 (update tracker)
视频流 (video frame)
前后向错误(Forward-Backward Error)
ˆt x
前后向误差(FB Error)
ˆt 1 x
后向跟踪(backward trajectory)
xt k
xt
xt 1
前向跟踪(forward trajectory)
It
I t 1Leabharlann It k2.2 检测器设计
• 检测器采用滑动窗口的方法在图像中寻找目标, 利用级联分类器输出结果。级联分类器包含三 部分:方差比较、合并分类器以及最近邻分类。
汇报内容
TLD概述 TLD关键技术 TLD局限性
1 TLD概述
TLD:Tracking-Learning-Detection TLD是英国萨里大学的一个捷克籍博士生 Zdenek Kalal在其攻读博士学位期间提出的一种 新的单目标长期跟踪算法。该算法与传统跟踪 算法的显著区别在于将传统的跟踪算法和检测 算法相结合来解决被跟踪目标在被跟踪过程中 发生的形变、部分遮挡等问题。同时,通过一 种改进的在线学习机制不断更新跟踪模块和检 测模块,从而使得跟踪效果更加稳定和可靠。
P-N学习过程
未标记数据 (unlabeled data)
分类器 (classifier)
分类器参数 (classifier parameters) 标记 (labels) [-] [+]
标记数据 (labeled data)
训练集(training set)
训练 (training)
P-N专家(P-N experts)
• 滑动窗口的扫描策略为:每次尺度变化为1.2,水平和垂 直位移为宽度和高度的10%,最小框图大小为20个像素。 • 方差比较:对滑窗图像与目标图像计算灰度值方差,将 结果低于原图50%的结果抛弃。 • 合并分类器:首先对于输入图像进行平滑滤波处理降噪, 而后在图像内部生成13个像素比较对,最终的像素比较 结果输出为一个13位的二进制像素编码,该二进制编码 将映射到某后验概率。依据各基分类器输出的后验概率 结果平均,如果其得分大于0.5,将进入下一步,否则将 被舍弃。 • 最近邻分类器:合并分类器的输出结果再经过最近邻分 类器输出检测器的结果。
跟踪器实现流程
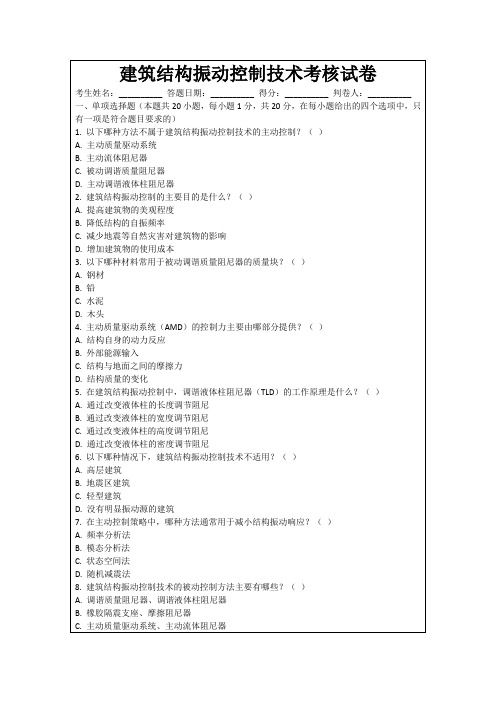
跟踪点的选择
• 选择了一种brute force selection mechanism (强制选择机理): 在整个图像序列中跟踪 第一帧中的每个像素; 通过FB错误方法来估 计轨迹; 计算每个像素的误差。最后得到 Error Map(误差图),表示整个图像序列中跟 踪点的可靠性。
左边的图是第一帧图像,红色的点表示最可靠像素的1%。 右边的图是Error Map。深色表示低的FB错误:A区域表示树 影, B 区域表示行人的身体部分。亮色区域是很难或者不可 能跟踪的:被遮挡的(C),从相机视野中消失的(D),缺 少纹理信息的( E )。这个实验表明 FB 错误方法能够用于选 择可用于可靠追踪的特征点。
整 合 器 (
目标模型(object model)
学习(learning)
目标状态 (object state)
Integrator
更新检测器 (update detector)
) 检测(detection)
2 TLD关键技术
跟踪器
检测器
学习模 块
2.1 跟踪器设计
• TLD的跟踪部分改进了基于Lucas-Kanade光流的 跟踪方法,提出一种Median Flow(中值光流 法)跟踪方法,并在此基础上囊括了跟踪失败 时候的检测。中值光流跟踪器跟踪矩形框里的 目标,并估计他的运动。跟踪器估计出矩形框 内的一些点的移动,估计他们的可靠性,然后, 通过取一些最可靠的移动的中值作为最后的矩 形框的移动。
P-N学习步骤如下:
在当前帧评估检测器; 利用P-N约束来估计检测器的误差; 根据由P-N约束所产生的标注样本来更新检测 器; 在训练学习的最后所获得的检测器就叫做最终 检测器。
P-N学习实例
3 TLD局限性
• 目前的TLD架构只训练检测器,而跟踪器则固 定不变。这样的结果就是跟踪器会总是产生相 同的错误。一个比较好的改进就是对跟踪模块 也进行训练和学习。 • TLD目前还只能跟踪一个目标。 • TLD目前还不能很好地处理黏连的目标情形, 比如多行人的情况。 • 在一些受限制的场景下,比如说摄像机是固定 的,TLD可以实现进行背景提取,这样会获得 更好的跟踪能力。
汇报完毕 敬请批评指正