稳态误差计算
合集下载
系统的稳态误差为
r (t ) t
e ss
1
r (t ) t
e ss
1
2
Kp
0型 I型 II型
Kv
0
Ka
0 0
ess
1
1
2
1 K
K
p
KvKp1来自 1Ka
K
0 0
Kv
K
0
Ka
三、系统稳定误差的计算
综述,系统的稳态误差与输入信号形式有 关,对于一个结构确定的系统,如果给定 输入形式不同,其稳态误差就不同;同时 稳态误差与系统结构也密切相关,如果给 定信号一定,不同结构的系统稳态误差也 不同。 按静态误差系数法计算稳态误差的方法, 是基于拉氏变换的终值定理,只能使用阶 跃、斜坡及加速度或他们的组合,如果输 入是其他任意时间函数,以上结论则不能 成立。
ess
特征方程为D( s) 1 Gk ( s) an s n an 1s n 1 ... a2 s 2 a1s a0 0
n n 1 2 a s a s ... a s 等式两边同除以 n n 1 2 a1s a0 1 Gk ( s) 0 1 0 则 n n 1 2 an s an 1s ... a2 s 得 a1s a0 Gk ( s) 该系统为Ⅱ型系统 an s n an 1s n 1 ... a2 s 2 开环增益为 a0 a1s a0 K 2 a2 n2 n 3 s (an s an 1s ... a2 )
ess
1、先求取系统的开环传递函数 Gk ( s)
Gk (s)
C(s)
设开环传递函数为 Gk ( s) M ( s) 即,开环传递函数 N ( s) 与闭环传递函数 M (s) 有相同的零点 Gk ( s ) M (s) N (s) GB ( s ) a s a0 1 Gk ( s ) 1 M ( s ) N ( s ) M ( s ) 得 Gk ( s ) 1 ? N (s)
3-5稳态误差的分析与计算
0型 系统
m
K (TjS 1) G(s) j1
n
(TiS 1)
i 1
抛物线输入 Ⅱ型系统
系统开环传递函数中 不含积分环节
KPlim G(s)K
s0
ess
1 1 K
阶跃输入时,误差系数=K
输出始终不会等于输入,存在稳态误差
Klim SG (s)0 斜坡输入时,误差系数=0
e s 0 ss 稳态误差无穷大(输出不能跟随输入)
三种典型输入下对应于“0”“I”“Ⅱ”型三 种系统
有九种情况,误差的计算公式列表如下:
给定输入
给定稳态误差的终值 0型系统 I型系统 Ⅱ型系统
1(t)
1/(1+K)
0
0
t
∞1/K0源自t2/2∞∞1/K
注意: (1) 尽管将阶跃输入、速度输入及加速度输入下 系统的误差分别称之为位置误差、速度误差和加 速度误差,但对速度误差、加速度误差而言并不 是指输出与输入的速度、加速度不同,而是指输 出与输入之间存在一确定的稳态位置偏差。
i1 n1
(is1) (k2s2 2kks1)
k1 n2
(Tjs1) (Tl2s2 2lls1)
j1
l1
稳态误差系数仅与系统参数K、(积分环节个数—系统 型号)有关,对应=0、1、2 称 0、I、Ⅱ型系统
0、I、Ⅱ型三种系统 分别三种典型输入 稳态误差有九种情况
阶跃输入 斜坡输入
0型系统 I型系统
3. 稳态误差与系统传递系数有关
4. 稳态误差与扰动有关
本章结束
给定输入下的稳态误差与稳态误差系数
阶跃输入下:
e ssr
1
1 K
P
KPlimG(s) s0
线性系统的稳态误差计算
函数为
G( s) K S ( S 2 bS C )
p 1 p 2 b C 4 2 p 2 C 2 p K 0.5C K 2 b 3
因为 ess 按定义
1 2 Kr
s 0
Kv
K 0.5, K 0.5C C
令r (t ) Rt 2 / 2,R 常量,R(s) R / s3。
sR(s) sR / s3 R R R ess lim lim lim 2 2 lim 2 s 0 1 G( s) H ( s ) s 0 1 G( s ) H ( s ) s 0 s s G ( s ) H (s ) s 0 s G (s ) H (s ) Ka
系统稳态误差计算通式则可表示为
ess
1 lim s R ( s )
s 0
sR( s) ess lim sE ( s) lim s 0 s 0 1 G ( s ) H ( s )
K lim s
s 0
系统型别 e ss 与 K 开环增益有关 R ( s ) 输入信号
def
E ( s) 1 R(s) 1 H ( s)G( s)
E ( s ) e ( s ) R( s ) R( s ) 1 H ( s)G( s)
e(t ) L1[e (s)R(s)] ets (t ) ess (t )
瞬态分量
稳态分量
E ( s ) e ( s ) R( s )
要求对于阶跃作用下不存 在稳态误差,则必须选用 Ⅰ型及Ⅰ型以上的系统
4.斜坡输入作用下的稳态误差和静态速度误差系数
r (t ) Rt,R 常量,R(s) R / s 2。
G( s) K S ( S 2 bS C )
p 1 p 2 b C 4 2 p 2 C 2 p K 0.5C K 2 b 3
因为 ess 按定义
1 2 Kr
s 0
Kv
K 0.5, K 0.5C C
令r (t ) Rt 2 / 2,R 常量,R(s) R / s3。
sR(s) sR / s3 R R R ess lim lim lim 2 2 lim 2 s 0 1 G( s) H ( s ) s 0 1 G( s ) H ( s ) s 0 s s G ( s ) H (s ) s 0 s G (s ) H (s ) Ka
系统稳态误差计算通式则可表示为
ess
1 lim s R ( s )
s 0
sR( s) ess lim sE ( s) lim s 0 s 0 1 G ( s ) H ( s )
K lim s
s 0
系统型别 e ss 与 K 开环增益有关 R ( s ) 输入信号
def
E ( s) 1 R(s) 1 H ( s)G( s)
E ( s ) e ( s ) R( s ) R( s ) 1 H ( s)G( s)
e(t ) L1[e (s)R(s)] ets (t ) ess (t )
瞬态分量
稳态分量
E ( s ) e ( s ) R( s )
要求对于阶跃作用下不存 在稳态误差,则必须选用 Ⅰ型及Ⅰ型以上的系统
4.斜坡输入作用下的稳态误差和静态速度误差系数
r (t ) Rt,R 常量,R(s) R / s 2。
3-6线性系统的稳态误差计算
i=1 n 1 i k =1 n2 k j =1 j l =1 l
m 1
m2
2
+ 2ζ kτk s +1) + 2ζlTs +1) l
∏(T s +1)∏(Ts
=
2
K ⋅ G0 (s) sν
sR(s) 1 essr = lim = = s→0 1+ G (s) 1+ limGk (s) k
s→0
1 1 = K 1+ Kp 1+ lim ν ⋅ G0 (s) s→0 s
三、扰动作用下的稳态误差(3) 扰动作用下的稳态误差(3) [例]系统结构图如图所示。当 r(t) = n(t) = 1(t) 系统结构图如图所示。 时,求系统的稳态误差 ess;若要求稳态误差 为零,如何改变系统结构。 为零,如何改变系统结构。 解:该系统对给定输入而言属于Ⅰ型系统。 该系统对给定输入而言属于Ⅰ型系统。 所以当给定输入为单位阶跃函数时的稳态误差 essr = 0
3、单位抛物线输入时的稳态误差
R(s) =
1 s3
sR(s) 1 essr = lim = = 2 s→0 1+ G (s) lims ⋅ Gk (s) k
s→0
1 1 = K Ka lim ν −2 ⋅ G0 (s) s→0 s
∞ 1 = K 0
Ka
根据
ν =0,1 ν =2 ν ≥3
m2
=
K ⋅ G0 (s) ν s
K-开环增益
系统型别(即积分环节的个数) ν − 系统型别(即积分环节的个数)
当ν =0,无积分环节,称为0型系统 无积分环节,称为0
当 = ,有一个积分环节,称为Ⅰ型系统 ν 1 有一个积分环节,称为Ⅰ
m 1
m2
2
+ 2ζ kτk s +1) + 2ζlTs +1) l
∏(T s +1)∏(Ts
=
2
K ⋅ G0 (s) sν
sR(s) 1 essr = lim = = s→0 1+ G (s) 1+ limGk (s) k
s→0
1 1 = K 1+ Kp 1+ lim ν ⋅ G0 (s) s→0 s
三、扰动作用下的稳态误差(3) 扰动作用下的稳态误差(3) [例]系统结构图如图所示。当 r(t) = n(t) = 1(t) 系统结构图如图所示。 时,求系统的稳态误差 ess;若要求稳态误差 为零,如何改变系统结构。 为零,如何改变系统结构。 解:该系统对给定输入而言属于Ⅰ型系统。 该系统对给定输入而言属于Ⅰ型系统。 所以当给定输入为单位阶跃函数时的稳态误差 essr = 0
3、单位抛物线输入时的稳态误差
R(s) =
1 s3
sR(s) 1 essr = lim = = 2 s→0 1+ G (s) lims ⋅ Gk (s) k
s→0
1 1 = K Ka lim ν −2 ⋅ G0 (s) s→0 s
∞ 1 = K 0
Ka
根据
ν =0,1 ν =2 ν ≥3
m2
=
K ⋅ G0 (s) ν s
K-开环增益
系统型别(即积分环节的个数) ν − 系统型别(即积分环节的个数)
当ν =0,无积分环节,称为0型系统 无积分环节,称为0
当 = ,有一个积分环节,称为Ⅰ型系统 ν 1 有一个积分环节,称为Ⅰ
稳态误差
2! e(0) r ( t ) 1 Fe(0)( t ) e ss ( t ) Fe(0)r ( t ) F r 2! C 0 r ( t ) C1r ( t ) C 2( t ) r
拉普拉斯反变换,得
注意: (1) 尽管将阶跃输入、速度输入及加速度输入下 系统的误差分别称之为位置误差、速度误差和加 速度误差,但对速度误差、加速度误差而言并不 是指输出与输入的速度、加速度不同,而是指输 出与输入之间存在一确定的稳态位置偏差。 (2) 如果输入量非单位量时,其稳态偏差(误差) 按比例增加。 (3) 系统在多个信号共同作用下总的稳态偏差误 差等于多个信号单独作用下的稳态偏差(误差) 之和。
给定稳态误差与扰动稳态误差 一
终值定理: ess tlim e(t ) lim SE(s) s0 与输入有关! 给定稳态误差终值的计算
1 essr lim SEr (s) lim SR (s)Fr(s) lim S R (s) s 0 s 0 s 0 1 G(s)
消除或减少稳态误差的方法 • 产生稳态误差的原因
给定输入 1(t) 系统型号越高,无差度 t 越高。可以串联积分环 t2/2
输入信号是实际 的需要,不能变
给定稳态误差的终值 0型系统 I型系统 Ⅱ型系统 1/(1+K) 0 0 ∞ 1/K 0 ∞ ∞ 1/K
节提高系统型号。 1. 稳态误差与输入信号有关 传递系数越大,稳态误差越小。 2. 稳态误差与系统型号有关 3. 稳态误差与系统传递系数有关 4. 稳态误差与扰动有关
ess =
esr
+ esn
s 1 / H s
E s X or s X o s s X i s X o s X i s H s X o s / H s
拉普拉斯反变换,得
注意: (1) 尽管将阶跃输入、速度输入及加速度输入下 系统的误差分别称之为位置误差、速度误差和加 速度误差,但对速度误差、加速度误差而言并不 是指输出与输入的速度、加速度不同,而是指输 出与输入之间存在一确定的稳态位置偏差。 (2) 如果输入量非单位量时,其稳态偏差(误差) 按比例增加。 (3) 系统在多个信号共同作用下总的稳态偏差误 差等于多个信号单独作用下的稳态偏差(误差) 之和。
给定稳态误差与扰动稳态误差 一
终值定理: ess tlim e(t ) lim SE(s) s0 与输入有关! 给定稳态误差终值的计算
1 essr lim SEr (s) lim SR (s)Fr(s) lim S R (s) s 0 s 0 s 0 1 G(s)
消除或减少稳态误差的方法 • 产生稳态误差的原因
给定输入 1(t) 系统型号越高,无差度 t 越高。可以串联积分环 t2/2
输入信号是实际 的需要,不能变
给定稳态误差的终值 0型系统 I型系统 Ⅱ型系统 1/(1+K) 0 0 ∞ 1/K 0 ∞ ∞ 1/K
节提高系统型号。 1. 稳态误差与输入信号有关 传递系数越大,稳态误差越小。 2. 稳态误差与系统型号有关 3. 稳态误差与系统传递系数有关 4. 稳态误差与扰动有关
ess =
esr
+ esn
s 1 / H s
E s X or s X o s s X i s X o s X i s H s X o s / H s
《自动控制原理》第三章 35 稳态误差计算
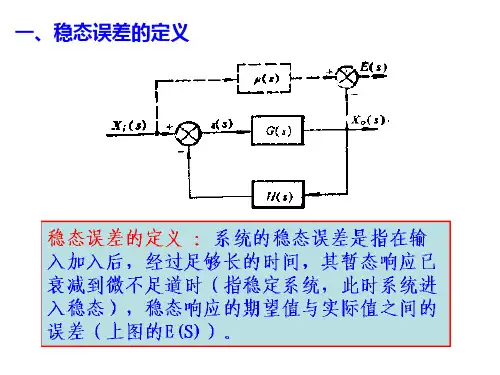
两种定义的联系: E ' ( s ) E ( s ) H (s)
H ( s ) 1时, E ( s ) E ' ( s )
能源与动力学院 第三章 线性系统的时域分析法
3
1. 误差与稳态误差的定义…
e(t ) L1[ E (s)] L1[e (s) R (s)] L1[ R (s) ] 1 G(s)H (s)
3-6 线性系统的稳态误差计算 (Steady-state error)
稳定性 系统性能 动态性能
稳态性能 稳态误差
稳态性能
原理性误差 结构性误差 (附加稳态误差)
系统结构 输入类型、形式 摩擦,间隙 死区等非线性
能源与动力学院
第三章 线性系统的时域分析法
1
3-6 线性系统稳态误差计算
本节内容:
N(s)
C(s)
G2 (s)
H (s)
输出端误差定义
E'n
(s)
Cn(s)
G2(s)
1G1(s)G2(s)H(s)
N(s)
输入端误差定义
En(s)
Cn(s)H(s)
G2(s)H(S) 1G1(s)G2(s)H(s)
ets (t ) ess (t ) 稳态误差
ess ( )
Lim
s0
sE (s)
Lim
s0
1
sR (s) G(s)H
(s)
ess():终值误差 条件s: E(s)在右半平面及析 虚( 轴原 上点 解除外)
能源与动力学院 第三章 线性系统的时域分析法
4
1. 误差与稳态误差的定义…
例1
R(s) E(S)
误差与稳态误差的定义 系统的类型 输入作用下稳态误差计算 扰动作用下稳态误差 减小或消除稳态误差的措施
稳态误差
p
在单位阶跃作用下, 0 的系统为有差系统,此时开环增益K 越大稳态误差越小; 1 的系统为无差系统。
13
3.6 稳态误差分析
单位斜坡函数输入时的稳态误差
当输入为R ( s )
e ssr lim
s 0
1 s
2
时(单位斜坡函数)
s 1 s
2
1 Gk (s)
1 lim s G k ( s )
s 0
s K
可见给定作用下的稳态误差与外作用有关;与时间常数形式的 开环增益有关;与积分环节的个数有关。
11
3.6 稳态误差分析
开环系统的型
系统的无差度阶数(开环传递函数的型) 通常称开环传递函数中积分的个数为系统的无差度阶数,并将系 统按无差度阶数进行分类。 当 0 ,无积分环节,称为0型系统 当 1 ,有一个积分环节,称为Ⅰ型系统 当 2 ,有二个积分环节,称为Ⅱ型系统 ……………… 当 2 时,使系统稳定是相当困难的。因此除航天控制系统外, Ⅲ型及Ⅲ型以上的系统几乎不用。
s 0
当 2时 , K v lim
Kv
K s
s 0
G0 (s) ,
14
K 的大小反映了系统在斜坡输入下的稳态精度。 v 越大,e ss 越 小。所以说 K v 反映了系统跟踪斜坡输入的能力。 根据 K v 计算的稳态误差是系统在跟踪速度阶跃输入时位置上的 误差。
3.6 稳态误差分析
2
3.6 稳态误差分析
显然,只有当系统稳定时,研究稳态误差才有意义;对于不 稳定的系统而言,根本不存在研究稳态误差的可能性。 有时,把在阶跃函数作用下没有原理性稳态误差的系统, 称为无差系统;而把具有原理性稳态误差的系统,称为有差系 统。
在单位阶跃作用下, 0 的系统为有差系统,此时开环增益K 越大稳态误差越小; 1 的系统为无差系统。
13
3.6 稳态误差分析
单位斜坡函数输入时的稳态误差
当输入为R ( s )
e ssr lim
s 0
1 s
2
时(单位斜坡函数)
s 1 s
2
1 Gk (s)
1 lim s G k ( s )
s 0
s K
可见给定作用下的稳态误差与外作用有关;与时间常数形式的 开环增益有关;与积分环节的个数有关。
11
3.6 稳态误差分析
开环系统的型
系统的无差度阶数(开环传递函数的型) 通常称开环传递函数中积分的个数为系统的无差度阶数,并将系 统按无差度阶数进行分类。 当 0 ,无积分环节,称为0型系统 当 1 ,有一个积分环节,称为Ⅰ型系统 当 2 ,有二个积分环节,称为Ⅱ型系统 ……………… 当 2 时,使系统稳定是相当困难的。因此除航天控制系统外, Ⅲ型及Ⅲ型以上的系统几乎不用。
s 0
当 2时 , K v lim
Kv
K s
s 0
G0 (s) ,
14
K 的大小反映了系统在斜坡输入下的稳态精度。 v 越大,e ss 越 小。所以说 K v 反映了系统跟踪斜坡输入的能力。 根据 K v 计算的稳态误差是系统在跟踪速度阶跃输入时位置上的 误差。
3.6 稳态误差分析
2
3.6 稳态误差分析
显然,只有当系统稳定时,研究稳态误差才有意义;对于不 稳定的系统而言,根本不存在研究稳态误差的可能性。 有时,把在阶跃函数作用下没有原理性稳态误差的系统, 称为无差系统;而把具有原理性稳态误差的系统,称为有差系 统。
稳态误差计算(普通解法)
⎡ K ⎤ 1 ⎤ ⎡1 G( z) = Z ⎢ = KZ ⎢ − ⎥ ⎣ s s + 1⎥ ⎦ ⎣ s ( s + 1) ⎦
z ⎛ z =K⎜ − −T ⎝ z −1 z − e
系统特征方程为
图 6-21 离散系统结构图
K (1 − e−T ) z ⎞ = ⎟ −T ⎠ ( z − 1)( z − e )
D( z ) = ( z − 1)( z − e −T ) + K (1 − e −T ) z = z 2 + [(1 − e −T ) K − 1 − e −T ]z + e −T = 0
利用朱利稳定判据
⎧ D(1) = K (1 − e −T ) > 0 ⎪ ⎨ −T −T ⎪ ⎩ D(−1) = 2(1 + e ) − K (1 − e ) > 0
e(∞) = lim
z →1
( z − 1)( z − 0.368) =0 z 2 − 0.736 z + 0.368
2
当 r (t ) = t ,相应 r (nT ) = nT 时, R ( z ) = T z ( z − 1) ,于是由式(6-59)求得
e(∞) = lim
z →1
T ( z − 0.368) = T =1 z − 0.736 z + 0.368
G( z) =
e − T z + 1 − 2e − T 0.368 z + 0.264 = 2 −T ( z − 1)( z − e ) T =1 z − 1.368 z + 0.368
2
0.368 z + 0.264 →∞ z − 1.368 z + 0.368 0.368 z + 0.264 =1 K v = lim( z − 1) 2 z →1 z − 1.368 z + 0.368 K p = lim
3.5 控制系统的稳态误差分析与计算终
2.系统的类型
K 1s 1 2 s 1 Gk s Gs H s v s T1s 1T2 s 1
K为开环增益 τ1、τ2……和T1、T2……为时间常数
n m
1、系统对单位阶跃输入的稳态偏差 K 1s 11 2 s 1 s lim G G sE H s n m s s lim X s k v s ss i s 0 s s0 T1 s G 1 T s 1 1 s2 H s
s s Gk s
K 1s 1 对0型系统 K a lim s 0 s 0 T1s 1 1s 1 2 K 对I型系统 K a lim s 0 s 0 sT1s 1 1s 1 2 K
2
稳态加速度偏差系数 令:K
a
ss s 0 s 0 i s 0 k
2
K 1s 1 对0型系统 K v lim s 0 ss s 0 T1s 1 K 1s 1 1 对I型系统 K v lim s K ss s 0 sT1s 1 K K 1s 1 对II型系统 K v lim s 0 ss 2 s 0 s T1s 1
lim s Gs H s lim s Gk s
2 2 s 0 s 0
ss
ss
1 ss K
对II型系统 K a lim s s 0
s T1s 1
2
K
1t
t
1 ss Kv
Kv 0
K p lim Gk s K v lim sGk s K a lim s 2Gk s s 0 s 0 s 0
2 i
s H s s 1 Gs H s 1 G s T s 1T s1
《自动控制原理》第三章-3-5-稳态误差计算
伺服电动机
R(s)
E(s)
1
C(s)
-
s(s 1)
K 1, 1
r(t) 1(t),k p , ess 0
r(t) t, kv 1, ess 1
r(t)
1 2
t2, ka
0, ess
位置随动系统
能源与动力学院 第三章 线性系统的时域分析法
14
4.扰动作用下稳态误差
R(s)
-
E(s)
R(s) E(s) 20
s4
N (s)
+
2
C(s)
s(s 2)
能源与动力学院 第三章 线性系统的时域分析法
28
3-20
R
-
K1
U
K2 S(T1S 1)
C
G(s)
K1K 2
B
s(T1s 1)(T2s 1)
1 T2S 1
(s)
C(s) R(s)
T1T2 s 3
K1K2 (T2s 1) (T1 T2 )s2 s
1
能源与动力学院 第三章 线性系统的时域分析法
7
3.输入作用下稳态误差计算
(1)阶跃作用下的稳态误差
r(t) R 1(t), R(s) R s
ess
Lim sR(s) s0 1 G(s)H (s)
Lim s1R(s)
s0
K Lim s
s0
1
R LimG(s)H (s)
Lim s R
s0
K Lim s
27
参考答案: Kp= ,kv=5,ka=0,essr=0.4,essn=-0.2
四、控制系统如图, r(t) 1 2t, n(t) 1(t), 试计算
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s0
A Ka
静态加速度误差系数 K a lim s 2 G1 ( s ) H ( s ) lim
s 0 s 0
K sv2
§3.6.3
静态误差系数法(3)
§3.6.3
静态误差系数法(4)
2
例 3 系统结构图如图所示,已知输
Routh
s3 s2 s1
s0
2
1+0.6K
3
3(1+0.6K)-2K 3 K
K
0 3-0.2K>0 K>0 K<15
10 < K <15
课程小结
§3.6.1 误差与稳态误差
误差定义: (1)按输入端定义误差;(2)按输出端定义误差 稳态误差: (1)静态误差; (2)动态误差
( s ) K * ( s z1 )(s z2 )( s zm ) Cn C1 C2 ( s 1 )(s 2 )( s n ) s 1 s 2 s n
e2t
k(t ) C1e1t C2
Cne nt
闭环零点影响系数Ci ,会改变动态性能,但不影响稳定性。
解. G( s )
K 1 (Ts 1) K K1 a s 2 ( s a) v 2 K1 ( s ) 2 s ( s a ) K 1 (Ts 1)
D( s) s 3 as2 K1Ts K1 0
r1 (t ) 2t
1 r2 ( t ) 4t 8 t 2 2
s 0
e ssn lim s en ( s ) N ( s ) lims
s0
A K 2 K 3 s1 (Ts 1) A K1 s 2 s1 s2 K1 K 2 K 3Ts K1 K 2 K 3
举 例
例1 系统结构图如图所示,当r(t)=t 时,要求ess<0.1,求K的范围。 解 . G( s )
通常把在阶跃输入作用下没有原理性稳态误 差的系统称为“无差系统”; 而把有原理性稳态误差的系统称为“有差系统” 。
§3.6
线性系统的稳态误差(2)
§3.6.1 误差与稳态误差
按输入端定义的误差
E ( s ) R( s ) H ( s )C ( s )
按输出端定义的误差
E ( s ) R( s ) C ( s) H ( s)
按前馈补偿的复合控制方案可以有效提高系统的稳态精度
§3.6.4
在主反馈口到干扰作用点之间的前向通道中 提高增益、设置积分环节,可以同时减小或消 除控制输入和干扰作用下产生的稳态误差。 干扰作用引起的稳态误差分析
r ( t ) At 2 2 例 5 系统如图所示,已知输入 , n( t ) At 求系统的稳态误差。 K K1 K 2 K 3 解. G( s) K1 K 2 K 3 (Ts 1) s1 s2 v 2
D( s) Ts2 s K 0
e ssr lim s e ( s ) R( s ) lim s
s 0 s 0
Kn Tn s 1 K n s(Ts 1) E ( s) en ( s ) K N ( s) (Tn s 1)s(Ts 1) K 1 s(Ts 1) K n s(Ts 1) 1 Kn essn lim s en ( s ) N ( s ) lim s 2 s 0 s 0 (Tn s 1)s(Ts 1) K s K
e ( s) E ( s) R( s )
D( s) s1 s2 K1 K 2 K 3Ts K1 K 2 K 3 0
essr lims e ( s )
s 0
1 s1 s2 K K K (Ts 1) s1 s2 K 1 K 2 K 3 (Ts 1) 1 1 2 3 s1 s2
闭环极点决定模态,因此决定系统的稳定性,也影响动态性能。
(3) 闭环系统的稳定性与其开环是否稳定无直接关系。
自动控制原理
§3
(第 12 讲) 线性系统的时域分析与校正
概述
一阶系统的时间响应及动态性能 二阶系统的时间响应及动态性能
§3.1
§3.2 §3.3
§3.4
§3.5 §3.6
高阶系统的阶跃响应及动态性能
K (0.6s 1) s( s 1)(2s 1) 1 r (t ) t e ss 0.1 K
K v 1
K 10
D( s) s( s 1)(2s 1) K (0.6s 1) 2s 3 3s 2 (1 0.6K )s K 0
稳态误差 动态误差:误差中的稳态分量 e ( t ) s
e ss lim e( t ) e( ) 静态误差: t
§3.6.2 计算稳态误差的一般方法
(1)判定系统的稳定性 (2)求误差传递函数
e ( s)
E ( s) , R( s )
en ( s )
s e ( s ) R( s ) en ( s ) N ( s ) (3)用终值定理求稳态误差 e ss lim s0
K K v 1
D( s) Ts2 s K 0
KGc ( s ) E ( s) s(Ts 1) s(Ts 1) KGc ( s ) e ( s) K R( s ) s(Ts 1) K 1 s s(Ts 1) Gc ( s ) K K K A sT 1 Gc ( s ) A1 Gc ( s ) A s s 0 e ss lims e ( s ) 2 lim s 0 s 0 s s(Ts 1) K K 1
(1)判定稳定的必要条件 ai 0 (2)劳斯判据 (3)劳斯判据特殊情况的处理 (4)劳斯判据的应用 判定系统的稳定性 确定使系统稳定的参数取值范围
课程回顾 (2)
关于系统的稳定性:
(1) 稳定性是系统自身的属性,与输入的类型,形式无关。 (2) 系统稳定与否,只取决于闭环极点,与闭环零点无关。
r (t ) A 2 t 2
e ss 2 lim s
s 0
e ss 3 lim s
s 0
系统自身的结构参数
影响 ess 的因素:
外作用的类型(控制量,扰动量及作用点)
外作用的形式(阶跃、斜坡或加速度等)
§3.6.3
静态误差系数法(1)
ess 的计算规律
K ( 1 s 1) ( m s 1) K G0 ( s ) v v s (T1 s 1) (Tnv s 1) s
E ( s) 1 R( s ) 1 G1 ( s ) H ( s )
§3.6.3
s0
静态误差系数法(2)
e ss lim s e ( s ) R( s ) lim s R( s )
s0
1 lim s R( s ) 1 G1 ( s ) H ( s ) s 0
lim G0 ( s ) 1
s0
静态误差系数法 —— r(t) 作用时
G( s ) G1 ( s ) H ( s )
G0 ( s )
e ( s)
( 1 s 1) ( m s 1) (T1 s 1) (Tn v s 1)
1 K 1 v G0 ( s ) s 1 ess lim s e ( s ) R( s ) lim s R( s ) s0 s0 K 1 v G0 ( s ) s
静态位置误差系数 K p lim G1 ( s ) H ( s ) lim
s 0 s 0
K sv
s0
A 1 K p
r (t ) A t
e ssv lim s e ( s ) R( s ) lim s
s0 s0
A 1 A s 2 1 G1 ( s ) H ( s ) lim s G1 ( s ) H ( s )
E ( s) N ( s)
§3.6.2
解. e ( s )
计算稳态误差的一般方法 (1)
E ( s) R( s ) 1 1 K s(Ts 1) s(Ts 1) s(Ts 1) K
s(Ts 1) 1 1 2 s(Ts 1) K s K
例1 系统结构图如图所示,已知 r(t) = n(t) = t,求系统的稳态误差。
A 1 A e lim s ( s ) R ( s ) lim s e r ( t ) A 1(t ) ssp s 0 s 0 s 1 G1 ( s ) H ( s ) 1 lim G1 ( s ) H ( s )
s0
1 K 1 v G0 ( s ) s
自动控制原理
自动控制原理
本次课程作业
(12)
3 — 22, 23, 25 3 — 26(选做)
课程回顾
§3.5.1 §3.5.2
k (t ) 0 稳定性的概念 lim t 稳定的充要条件
系统闭环特征方程的所有根都具有负的实部
或所有闭环特征根均严格位于左半s平面
§3.5.3
稳定判据
D( s) an s n an1 s n1 a1 s a0 0
线性系统的稳定性分析 线性系统的稳态误差
§3.7
线性系统时域校正
自动控制原理
(第 12 讲)
§3.6 线性系统的稳态误差
§3.6
线性系统的稳态误差(1)
概
述
稳态误差是系统的稳态性能指标, 是对系统控制精度的度量。 对稳定的系统研究稳态误差才有意义, 所以计算稳态误差以系统稳定为前提。
本讲只讨论系统的原理性误差, 不考虑由于非线性因素引起的误差。
A Ka
静态加速度误差系数 K a lim s 2 G1 ( s ) H ( s ) lim
s 0 s 0
K sv2
§3.6.3
静态误差系数法(3)
§3.6.3
静态误差系数法(4)
2
例 3 系统结构图如图所示,已知输
Routh
s3 s2 s1
s0
2
1+0.6K
3
3(1+0.6K)-2K 3 K
K
0 3-0.2K>0 K>0 K<15
10 < K <15
课程小结
§3.6.1 误差与稳态误差
误差定义: (1)按输入端定义误差;(2)按输出端定义误差 稳态误差: (1)静态误差; (2)动态误差
( s ) K * ( s z1 )(s z2 )( s zm ) Cn C1 C2 ( s 1 )(s 2 )( s n ) s 1 s 2 s n
e2t
k(t ) C1e1t C2
Cne nt
闭环零点影响系数Ci ,会改变动态性能,但不影响稳定性。
解. G( s )
K 1 (Ts 1) K K1 a s 2 ( s a) v 2 K1 ( s ) 2 s ( s a ) K 1 (Ts 1)
D( s) s 3 as2 K1Ts K1 0
r1 (t ) 2t
1 r2 ( t ) 4t 8 t 2 2
s 0
e ssn lim s en ( s ) N ( s ) lims
s0
A K 2 K 3 s1 (Ts 1) A K1 s 2 s1 s2 K1 K 2 K 3Ts K1 K 2 K 3
举 例
例1 系统结构图如图所示,当r(t)=t 时,要求ess<0.1,求K的范围。 解 . G( s )
通常把在阶跃输入作用下没有原理性稳态误 差的系统称为“无差系统”; 而把有原理性稳态误差的系统称为“有差系统” 。
§3.6
线性系统的稳态误差(2)
§3.6.1 误差与稳态误差
按输入端定义的误差
E ( s ) R( s ) H ( s )C ( s )
按输出端定义的误差
E ( s ) R( s ) C ( s) H ( s)
按前馈补偿的复合控制方案可以有效提高系统的稳态精度
§3.6.4
在主反馈口到干扰作用点之间的前向通道中 提高增益、设置积分环节,可以同时减小或消 除控制输入和干扰作用下产生的稳态误差。 干扰作用引起的稳态误差分析
r ( t ) At 2 2 例 5 系统如图所示,已知输入 , n( t ) At 求系统的稳态误差。 K K1 K 2 K 3 解. G( s) K1 K 2 K 3 (Ts 1) s1 s2 v 2
D( s) Ts2 s K 0
e ssr lim s e ( s ) R( s ) lim s
s 0 s 0
Kn Tn s 1 K n s(Ts 1) E ( s) en ( s ) K N ( s) (Tn s 1)s(Ts 1) K 1 s(Ts 1) K n s(Ts 1) 1 Kn essn lim s en ( s ) N ( s ) lim s 2 s 0 s 0 (Tn s 1)s(Ts 1) K s K
e ( s) E ( s) R( s )
D( s) s1 s2 K1 K 2 K 3Ts K1 K 2 K 3 0
essr lims e ( s )
s 0
1 s1 s2 K K K (Ts 1) s1 s2 K 1 K 2 K 3 (Ts 1) 1 1 2 3 s1 s2
闭环极点决定模态,因此决定系统的稳定性,也影响动态性能。
(3) 闭环系统的稳定性与其开环是否稳定无直接关系。
自动控制原理
§3
(第 12 讲) 线性系统的时域分析与校正
概述
一阶系统的时间响应及动态性能 二阶系统的时间响应及动态性能
§3.1
§3.2 §3.3
§3.4
§3.5 §3.6
高阶系统的阶跃响应及动态性能
K (0.6s 1) s( s 1)(2s 1) 1 r (t ) t e ss 0.1 K
K v 1
K 10
D( s) s( s 1)(2s 1) K (0.6s 1) 2s 3 3s 2 (1 0.6K )s K 0
稳态误差 动态误差:误差中的稳态分量 e ( t ) s
e ss lim e( t ) e( ) 静态误差: t
§3.6.2 计算稳态误差的一般方法
(1)判定系统的稳定性 (2)求误差传递函数
e ( s)
E ( s) , R( s )
en ( s )
s e ( s ) R( s ) en ( s ) N ( s ) (3)用终值定理求稳态误差 e ss lim s0
K K v 1
D( s) Ts2 s K 0
KGc ( s ) E ( s) s(Ts 1) s(Ts 1) KGc ( s ) e ( s) K R( s ) s(Ts 1) K 1 s s(Ts 1) Gc ( s ) K K K A sT 1 Gc ( s ) A1 Gc ( s ) A s s 0 e ss lims e ( s ) 2 lim s 0 s 0 s s(Ts 1) K K 1
(1)判定稳定的必要条件 ai 0 (2)劳斯判据 (3)劳斯判据特殊情况的处理 (4)劳斯判据的应用 判定系统的稳定性 确定使系统稳定的参数取值范围
课程回顾 (2)
关于系统的稳定性:
(1) 稳定性是系统自身的属性,与输入的类型,形式无关。 (2) 系统稳定与否,只取决于闭环极点,与闭环零点无关。
r (t ) A 2 t 2
e ss 2 lim s
s 0
e ss 3 lim s
s 0
系统自身的结构参数
影响 ess 的因素:
外作用的类型(控制量,扰动量及作用点)
外作用的形式(阶跃、斜坡或加速度等)
§3.6.3
静态误差系数法(1)
ess 的计算规律
K ( 1 s 1) ( m s 1) K G0 ( s ) v v s (T1 s 1) (Tnv s 1) s
E ( s) 1 R( s ) 1 G1 ( s ) H ( s )
§3.6.3
s0
静态误差系数法(2)
e ss lim s e ( s ) R( s ) lim s R( s )
s0
1 lim s R( s ) 1 G1 ( s ) H ( s ) s 0
lim G0 ( s ) 1
s0
静态误差系数法 —— r(t) 作用时
G( s ) G1 ( s ) H ( s )
G0 ( s )
e ( s)
( 1 s 1) ( m s 1) (T1 s 1) (Tn v s 1)
1 K 1 v G0 ( s ) s 1 ess lim s e ( s ) R( s ) lim s R( s ) s0 s0 K 1 v G0 ( s ) s
静态位置误差系数 K p lim G1 ( s ) H ( s ) lim
s 0 s 0
K sv
s0
A 1 K p
r (t ) A t
e ssv lim s e ( s ) R( s ) lim s
s0 s0
A 1 A s 2 1 G1 ( s ) H ( s ) lim s G1 ( s ) H ( s )
E ( s) N ( s)
§3.6.2
解. e ( s )
计算稳态误差的一般方法 (1)
E ( s) R( s ) 1 1 K s(Ts 1) s(Ts 1) s(Ts 1) K
s(Ts 1) 1 1 2 s(Ts 1) K s K
例1 系统结构图如图所示,已知 r(t) = n(t) = t,求系统的稳态误差。
A 1 A e lim s ( s ) R ( s ) lim s e r ( t ) A 1(t ) ssp s 0 s 0 s 1 G1 ( s ) H ( s ) 1 lim G1 ( s ) H ( s )
s0
1 K 1 v G0 ( s ) s
自动控制原理
自动控制原理
本次课程作业
(12)
3 — 22, 23, 25 3 — 26(选做)
课程回顾
§3.5.1 §3.5.2
k (t ) 0 稳定性的概念 lim t 稳定的充要条件
系统闭环特征方程的所有根都具有负的实部
或所有闭环特征根均严格位于左半s平面
§3.5.3
稳定判据
D( s) an s n an1 s n1 a1 s a0 0
线性系统的稳定性分析 线性系统的稳态误差
§3.7
线性系统时域校正
自动控制原理
(第 12 讲)
§3.6 线性系统的稳态误差
§3.6
线性系统的稳态误差(1)
概
述
稳态误差是系统的稳态性能指标, 是对系统控制精度的度量。 对稳定的系统研究稳态误差才有意义, 所以计算稳态误差以系统稳定为前提。
本讲只讨论系统的原理性误差, 不考虑由于非线性因素引起的误差。