p06_中心流形_V14
东风雪铁龙C5新发动机故障码库

东风雪铁龙C5新发动机故障码库P0104::进气歧管进气自适应::P0105::进气歧管压力传感器信号::P0106::进气歧管压力传感器信号,一致性问题::P0107::进气歧管压力传感器信号:对正极短路::P0110::进气温度传感器信号::P0112::进气温度传感器信号:对负极短路::P0113::进气温度传感器信号:对正极短路或开路::P0115::发动机冷却液温度传感器信号::P0116::发动机冷却液温度传感器信号:一致性::P0117::发动机冷却液温度传感器信号:对负极短路::P0118::发动机冷却液温度传感器信号:对正极短路或开路:: P0121::电子节气门信号轨迹1和轨迹2之间不一致::P0122::电子节气门信号,轨迹1,开路::P0123::电子节气门信号,轨迹1,对地短路或对正极短路:: P0130::浓度调节::P0131::上游氧传感器信号:对地短路或对正极短路::P0132::上游氧传感器信号:对地短路或对正极短路::P0133::上游氧传感器信号,老化::P0134::上游氧传感器信号:开路::P0135::上游氧传感器加热控制::P0136::下游氧传感器信号:对地短路或对正极短路::P0137::下游氧传感器信号:对正极短路,对负极短路::P0138::下游氧传感器信号::P0140::下游氧传感器信号:开路::P0141::下游氧传感器加热控制::P0157::电子节气门信号,轨迹2,开路::P0158::电子节气门信号,轨迹2,对地短路或对正极短路:: P0170::浓度调节::P0171::浓度调节下限::P0172::浓度调节最大值::P0200::喷油嘴控制::P0201::喷油嘴控制1:开路或对负极短路::P0202::喷油嘴控制2:开路或对负极短路::P0203::喷油嘴控制3:开路或对负极短路::P0204::喷油嘴控制4:开路或对负极短路::P0215::电源继电器控制信号::P0220::油门踏板传感器轨迹1和轨迹2::P0221::油门踏板传感器的信号1和信号2之间不一致::P0222::油门踏板传感器信号1:对负极短路::P0223::油门踏板传感器信号1:对正极短路::P0227::油门踏板传感器信号2:对负极短路::P0228::油门踏板传感器信号2:对正极短路::P0262::喷油嘴控制1:对正极短路::P0265::喷油嘴控制2:对正极短路::P0268::喷油嘴控制3:对正极短路::P0271::喷油嘴控制4:对正极短路::P0300::一个或多个汽缸失火::P0313::一个或多个汽缸失火::P0325::爆震传感器信号::P0326::爆震传感器信号::P0340::气缸参考传感器信号::P0341::气缸参考传感器信号::P0350::点火线圈控制::P0351::点火线圈1控制,无火花::P0352::点火线圈3控制,无火花::P0355::点火线圈1/4控制,无火花::P0353::点火线圈4控制,无火花::P0354::点火线圈2控制,无火花::P0355::点火线圈1/4控制,无火花::P0356::点火线圈2/3控制,无火花::P0400::废气再循环(EOBD)::P0401::EGR(废气再循环)调节,流量不足或无流量:: P0403::EGR(废气再循环)调整::P0404::EGR(废气再循环)调整::P0405::废气再循环(EGR)控制:开路::P0406::废气再循环(EGR)控制:对地短路或对正极短路:: P0410::废气排放信号::P0411::废气排放信号::P0412::气泵继电器控制::P0413::气泵继电器控制:开路::P0414::气泵继电器控制:对地短路或对正极短路::P0420::催化转换器老化,效率缺失::P0440::碳罐排放电磁阀控制::P0444::碳罐排放电磁阀控制开路::P0445::碳罐排放电磁阀控制:对地短路或对正极短路:: P0461::废气排放信号::P0462::燃油传感器信号:对地短路或对正极短路::P0463::燃油传感器信号:开路::P0480::风扇要求的速度设置::P0481::风扇单元继电器控制::P0485::集成到发动机ECU的冷却功能::P0491::废气排放信号,未指定::P0500::车速传感器信号::P0501::车速传感器信号::P0503::车速传感器信号::P0530::空调压力传感器信号::P0532::空调压力传感器信号下限::P0533::空调压力传感器信号最大值:: P0562::电瓶电压下限::P0563::电瓶电压上限::P0564::巡航控制::P0568::电瓶电压上限::P0569::巡航控制:一致性::P0571::冗余制动开关信号一致性问题:: P0601::喷油ECU::P0603::喷油ECU::P0604::喷油ECU::P0606::喷油ECU::P0608::传感器电源::P0609::传感器电源::P0650::诊断等控制::P0654::发动机转速传感器信号故障:: P0655::冷却液温度告警灯电路::P0704::离合器开关信号,一致性问题::。
半导体器件芯片常用型号参数特性解析大全(精)
半导体器件常用型号参数解析一、半导体二极管参数符号及其意义CT---势垒电容Cj---结(极间)电容,表示在二极管两端加规定偏压下,锗检波二极管的总电容Cjv---偏压结电容Co---零偏压电容Cjo---零偏压结电容Cjo/Cjn---结电容变化Cs---管壳电容或封装电容Ct---总电容CTV---电压温度系数。
在测试电流下,稳定电压的相对变化与环境温度的绝对变化之比CTC---电容温度系数Cvn---标称电容IF---正向直流电流(正向测试电流)。
锗检波二极管在规定的正向电压VF下,通过极间的电流;硅整流管、硅堆在规定的使用条件下,在正弦半波中允许连续通过的最大工作电流(平均值),硅开关二极管在额定功率下允许通过的最大正向直流电流;测稳压二极管正向电参数时给定的电流IF(AV)---正向平均电流IFM(IM)---正向峰值电流(正向最大电流)。
在额定功率下,允许通过二极管的最大正向脉冲电流。
发光二极管极限电流。
IH---恒定电流、维持电流。
Ii--- 发光二极管起辉电流IFRM---正向重复峰值电流IFSM---正向不重复峰值电流(浪涌电流)Io---整流电流。
在特定线路中规定频率和规定电压条件下所通过的工作电流IF(ov)---正向过载电流IL---光电流或稳流二极管极限电流ID---暗电流IB2---单结晶体管中的基极调制电流IEM---发射极峰值电流IEB10---双基极单结晶体管中发射极与第一基极间反向电流IEB20---双基极单结晶体管中发射极向电流ICM---最大输出平均电流IFMP---正向脉冲电流IP---峰点电流IV---谷点电流IGT---晶闸管控制极触发电流IGD---晶闸管控制极不触发电流IGFM---控制极正向峰值电流IR(AV)---反向平均电流IR(In)---反向直流电流(反向漏电流)。
在测反向特性时,给定的反向电流;硅堆在正弦半波电阻性负载电路中,加反向电压规定值时,所通过的电流;硅开关二极管两端加反向工作电压VR时所通过的电流;稳压二极管在反向电压下,产生的漏电流;整流管在正弦半波最高反向工作电压下的漏电流。
P06B03LVG中文资料
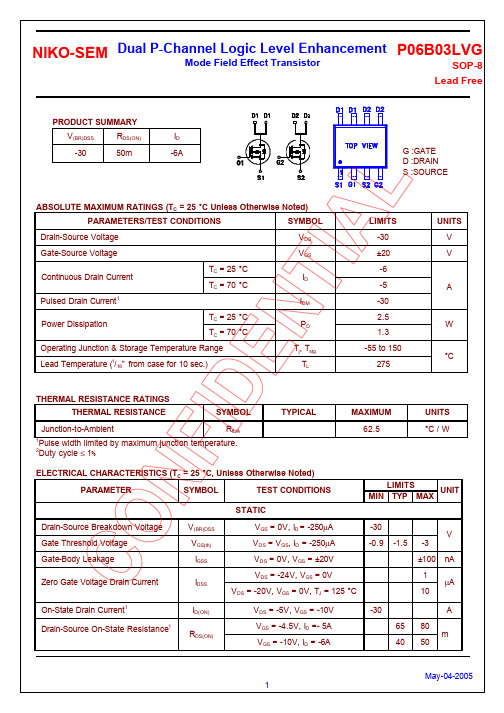
-2.1 -4 -1.2
A V nS nC
Forward Voltage1 Reverse Recovery Time Reverse Recovery Charge
1 2
Pulse test : Pulse Width ≤ 300 µsec, Duty Cycle ≤ 2¢H. Independent of operating temperature. 3 Pulse width limited by maximum junction temperature. REMARK: THE PRODUCT MARKED WITH “P06B03LVG”, DATE CODE or LOT # Orders for parts with Lead-Free plating can be placed using the PXXXXXXG parts name.
-55 to 150 275
°C
THERMAL RESISTANCE RATINGS THERMAL RESISTANCE Junction-to-Ambient
1 2
SYMBOL RθJA
TYPICAL
MAXIMUM 62.5
UNITS °C / W
Pulse width limited by maximum junction temperature. Duty cycle ≤ 1%
元器件交易网
Logic Level Enhancement P06B03LVG NIKO-SEM Dual P-ChannelField Effect Transistor Mode
SOP-8 Lead Free
PRODUCT SUMMARY V(BR)DSS -30 RDS(ON) 50m£[ ID -6A G :GATE D :DRAIN S :SOURCE
贝利摩6路控制阀技术数据表说明书
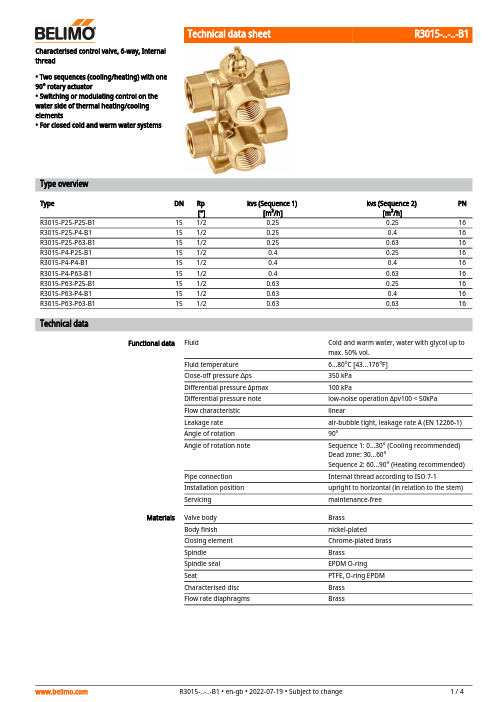
R3015-..-..-B1Characterised control valve, 6-way, Internalthread• Two sequences (cooling/heating) with one 90° rotary actuator• Switching or modulating control on the water side of thermal heating/cooling elements• For closed cold and warm water systemsType overviewTypeDN Rp ["]kvs (Sequence 1)[m³/h]kvs (Sequence 2)[m³/h]PN R3015-P25-P25-B1151/20.250.2516R3015-P25-P4-B1151/20.250.416R3015-P25-P63-B1151/20.250.6316R3015-P4-P25-B1151/20.40.2516R3015-P4-P4-B1151/20.40.416R3015-P4-P63-B1151/20.40.6316R3015-P63-P25-B1151/20.630.2516R3015-P63-P4-B1151/20.630.416R3015-P63-P63-B1151/20.630.6316Technical dataFunctional dataFluidCold and warm water, water with glycol up to max. 50% vol.Fluid temperature 6...80°C [43...176°F]Close-off pressure ∆ps 350 kPa Differential pressure Δpmax 100 kPaDifferential pressure note low-noise operation Δpv100 < 50kPa Flow characteristic linearLeakage rate air-bubble tight, leakage rate A (EN 12266-1)Angle of rotation 90°Angle of rotation noteSequence 1: 0...30° (Cooling recommended)Dead zone: 30...60°Sequence 2: 60...90° (Heating recommended)Pipe connection Internal thread according to ISO 7-1Installation position upright to horizontal (in relation to the stem)Servicingmaintenance-free MaterialsValve body Brass Body finish nickel-plated Closing element Chrome-plated brass Spindle Brass Spindle seal EPDM O-ring SeatPTFE, O-ring EPDM Characterised disc Brass Flow rate diaphragmsBrassR3015-..-..-B1•••••Mode of operationPressure compensationRecommended installation positionsWater quality requirements Safety notesThe valve has been designed for use in stationary heating, ventilation and air-conditioning systems and must not be used outside the specified field of application, especially in aircraft or in any other airborne means of transport.Only authorised specialists may carry out installation. All applicable legal or institutional installation regulations must be complied during installation.The valve does not contain any parts that can be replaced or repaired by the user.The valve may not be disposed of as household refuse. All locally valid regulations and requirements must be observed.When determining the flow rate characteristic of controlled devices, the recognised directives must be observed.Product featuresThe 6-way characterised control valve is adjusted by a rotary actuator. The actuator is connected by a modulating control system or a bus signal and moves the ball of the ball valve to the position dictated by the control signal.If the valve is adjusted in the clockwise direction (till the end stop), e.g. the cooling sequence is completely enabled; if the valve is adjusted in the counter-clockwise direction (90°), e.g. the heating sequence is completely enabled.In cases of combined heating/cooling control elements, the fluid remains in the control element when in the closed position (no heating or cooling). The pressure of the enclosed fluid can rise or fall due to changes in fluid temperature caused by the ambient temperature. The 6-way characterised control valves have an integrated pressure relief function for the purpose of compensating for such pressure changes.The pressure relief function is active in the closed position (45°) of the valve; reliable separation of Sequences 1 and 2 continues. For additional information, consult the notes for project planning for the 6-way characterised control valve.AccessoriesMechanical accessoriesDescriptionType Elbow 90° male/female DN 15 Rp 1/2, R 1/2, Set of 2 pcs.P2P15PE-1GE Fixing bracket for 6-way valve DN 15/20ZR-004Pipe connector for ball valve DN 15ZR2315Installation notesThe ball valve can be installed upright to horizontal. The ball valve may not be installed in ahanging position, i.e. with the spindle pointing downwards.The water quality requirements specified in VDI 2035 must be adhered to.Belimo valves are regulating devices. For the valves to function correctly in the long term, they must be kept free from particle debris (e.g. welding beads during installation work). The installation of a suitable strainer is recommended.R3015-..-..-B1ServicingFlow directionValve characteristic curve Using an additional flow limiterBall valves and rotary actuators are maintenance-free.Before any service work on the control element is carried out, it is essential to isolate the rotary actuator from the power supply (by unplugging the electrical cable if necessary). Any pumps in the part of the piping system concerned must also be switched off and the appropriate slide valves closed (allow all components to cool down first if necessary and always reduce the system pressure to ambient pressure level).The system must not be returned to service until the ball valve and the rotary actuator have been correctly reassembled in accordance with the instructions and the pipeline has been refilled by professionally trained personnel.The flow direction must be observed. The position of the ball can be identified from the L-marking on the spindle.The lower diagram shows the valve characteristic curve in relation to the ball position.When using additional flow limiting valves (e.g. PIQCV C2..QP(T)-.. with manual flow rate setting) or an additional pressure-independent control valve (e.g. motorised PIQCV) at the system level, it is not necessary to use the flow characterised disc in the 6-way valve in the system to reduce the kvs value.R3015-..-..-B1 DimensionsDimensional drawingsThe actuator dimensions can be found on the respective actuator data sheet.Further documentation• The complete product range for water applications• Data sheets for actuators• Installation instructions for actuators and/or ball valves• Notes for project planning for 6-way characterised control valves。
住友故障代码

住友系列挖机故障代码7000--P1压力传感器7001--P2压力传感器7002--N1压力传感器7003N2--压力传感器7004--过载压力穿感器7005--底部压力穿感器7006--压力连杆传感器7020---上部压力穿感器7021---回转压力穿感器7022--行走压力穿感器7023--小臂压力穿感器7040--燃油油位传感器7041---油温传感器7045--监视器热敏电阻器7060---大臂角度传感器7061--小臂角度传感器7062--偏差角度传感器7063---回油滤芯堵塞压力开关7200--回转制动电磁阀7201--行走高速电磁阀7202---升压电磁阀7203---BZ行走报警器7204--节能电磁阀7205--REL补油泵停止7206---备用回路回油阀7207--回转制动解除电磁阀7208 风扇反转电磁阀7209--空调水温信号输出7210---起重机7211--回转信号和铲斗停止7212--安全锁电磁阀7240---泵输出功率比例阀7241--泵流量比例阀7242----风扇比例阀7243---大臂比例阀7244---小臂比例阀7245--偏差比例阀7400.7402.7403--水温7404--油温7405.7406--钲压后进气温度7420---发电机电压7421--水位7422--机油压力7423---空滤7424--回油滤7600---CAN7601--监视器通信7602---ECM通信7603--控制器B通信7604--控制器S通信7605---ECM7606---EEPROM0087---无泵送压力0088--共轨压力异常0089 --泵送压力高0090---SCV驱动系统0107大气压力传感器 (电压底)0108大气压力传感器(电压高)0112增压前进气温度异常(电压底)0113---增压前进气温度异常(电压高)0117.0118水温过低或高0182.0183---燃油温度0192--共轨压力(电压低)0193--共轨压力(电压高)0201---0206 油嘴驱动电路断路(对应各缸)0219--极限运转0237.0238--增压后压力传感器电压低或高0335.0336--曲轴位制传感器0340.0341---凸轮位置传感器0380--预热传感器0487---EGR传感器是住友挖掘机故障代码大全7000-P1--压力传感器 7205--REL补油泵停止 7601--监视器通信7001--P2--压力传感器 7206---备用回路回油阀 7602---ECM通信7002--N1--压力传感器 7207--回转制动解除电磁阀 7603--控制器B通信7003N2--压力传感器 7208--风扇反转电磁阀 7605---ECM7004--过载压力传感器 7209--空调水温信号输出 7606---EEPROM7005--底部压力传感器 7210---起重机 0087---无泵送压力7006--压力连杆传感器 7211--回转信号和铲斗停止 0088--共轨压力异常7020--上部压力传感器 7212--安全锁电磁阀 0089 --泵送压力高7021---回转压力传感器 7240---泵输出功率比例阀 0090---SCV驱动系统7022--行走压力传感器 7241--泵流量比例阀 0107--大气压力传感器(电压底) 7023--小臂压力传感器 7242----风扇比例阀 0108--大气压力传感器(电压高) 7040--燃油油位传感器 7243---大臂比例阀 0112--增压前进气温度异常(电压底)7041---油温传感器 7244---小臂比例阀 0113---增压前进气温度异常(电压高) 7045--监视器热敏电阻器 7245--偏差比例阀 0117.0118--水温过低或高7060---大臂角度传感器 7400.7402.7403水温 0182.0183---燃油温度7061--小臂角度传感器 7404--油温 0192--共轨压力(电压低)7062--偏差角度传感器 7405.7406--钲压后进气温度 0193--共轨压力(电压高) 7063---回油滤芯堵塞压力开关 7420---发电机电压 0201---0206油嘴驱动电路断路(对应各缸)7200--回转制动电磁阀 7421--水位 0219--极限运转7201--行走高速电磁阀 7422--机油压力 0237.0238--增压后压力传感器电压低或高7202---升压电磁阀 7423---空滤 0335.0336--曲轴位制传感器7203---BZ行走报警器 7424--回油滤 0340.0341---凸轮位置传感器7204--节能电磁阀 7600---CAN 0380--预热传感器。
西门子SIMATIC ET 200pro FC-2 参数手册说明书

4.1.1 概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382
4.1.2 关于故障和报警列表的说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . 385
3.9
矢量控制 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
3.10 工艺功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354
2.5
写保护和专有技术保护参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
2.5.1 带有 “WRITE_NO_LOCK” 的参数 . . . . . . . . . . . . . . . . . . . . . . . . . 272
Hale Waihona Puke 92 参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1
参数一览 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
SIMATIC ET 200pro FC-2
6
参数手册 (LH20), 04/2015, A5E34501751
西门子420变频器说明书

西门子变频器—MM420型实训模块实训指导书前言随着电力电子技术、微电子技术、计算机控制技术及自动化控频器为核心制理论的发展,变频器制造技术有了跨越式的进步,以变的交流电机调速已广泛应用于国民经济各部门,在工业自动化领域,交流电机调速已经取代传统的直流调通领域,而速系统,而且大大提高了技术经济指标。
在耗电大户的风机、泵类(其耗电量几乎占工业用电一半)应用变频器控制,可以大大节约电能;在广泛关系各行各业的机械专业,应用变频器技术,是改造这一传统产业,实现机电一体化的重要手段;此外,在化纤、纺织塑料、化学、轻工等工业领域,应用变频器技术。
实现自动化提高了产品的质量与数量变频器不仅应用于工业、交且已进入家庭,在家电工业领域,空调器、电冰箱都有了变频器控制的相应产品,提高了家电产品的经济技术指标和智能化水平。
随着现代化的程度提高,对变频器的应用会更加普及。
使用好变频器是一门实践性很强的学问,有人说,使用好变频器的难易程度并不亚于使用好一台个人电脑。
但是,现在社会上已有的有关变频器技术资料,多为变频器的设计。
制造方面的专著,即使学习和掌握了这方面内容的学生,到了工程现场,仍不能正确使用和操作变频器,这是由于有关使用变频器的资料太计了变频器少,更不要说变频器的实训装置了,而社会上需要正确使用变频器的技术人员显然比设计制造变频器的技术人才要多的多,针对这一情况,我公司设实训模块,并将撰写有关变频器使用技能的教材供本科、大专、高职中专等各类学校相关专业选用,尤其适用职业技术教育。
我公司设计的实训模块选用的是西门子MM420型,就可触类旁通掌握其它厂家的变频器的使用方法与技能。
学生可以在实训台上了解变频器的结构、安装及接线的基本知识,进而学会使用变频器的基本技能,包括参数设定和操作方法,控制回路接线端子的设置,接线及智能化功能,功能参数的设置,变频器的维护等进行实际操作培训.在此基础上可以对模拟的实际工业控制系统:恒压供水系统、中央空调冷水系统,泵自动切换控制系统的模拟设计和调试,完成一个变频器工程题的实际操作训练,以满足社会生产实践的需要。
比亚迪F0机械式自动变速器AMT故障码诊断(可编辑)

比亚迪F0机械式自动变速器AMT故障码诊断(可编辑)比亚迪F0机械式自动变速器AMT故障码诊断AMT变速箱管理系统目录1、系统简介 22、名词解释 23、常规的售后自学习 3 3.1 挡位自学习 33.2 离合器啮合点自学习 3 3.3 系统排气 43.4 系统泄压 44、常规的检查方法 44.1 检查系统液面 44.2 检查系统液压及油泵效率 4 4.3 检查液压系统是否正常 4 4.4 检查刹车开关信号 5 4.5 检查门开关信号 5 4.6 检查换挡手柄状态 5 5、典型故障分析 55.1 发动机无法启动 5 5.2 发动机启动但无法挂挡 65.3 发动机熄火 65.4 驾驶中挡位卡死或受限 7 5.5 警报灯亮且蜂鸣器报警 7 5.6 汽车跳空挡85.7 模式自行改变 85.8 挡位自行跳转 85.9 换挡时导致飞车 95.10 离合器打滑、起步抖动 9 5.11 挡位忽然变化 96、故障码排查方法 96.1 P0560/0561 电池电压过低 9 6.2 P0604 微处理器故障/P060C 主微处理器故障/P0613 安全微处理器故障/P0701 电磁阀驱动模块 96.3 P0703 CAN上接收的刹车信号 9 6.4 P0710 发动机水温 106.5 P0715 离合器转速 106.6 P0719 开关上接收的刹车信号 10 6.7 P0720 车速 106.8 P0725 发动机转速 106.9 P0750 奇数挡电磁阀驱动/0755偶数挡电磁阀驱动 106.10 P0780 系统错误使用 10 6.11 P0805 离合器位置传感器 106.12 P081A 允许启动信号 116.13 P0820 GLS0/0821 GLS1/0822 GLS2/0823 GLS3/0825 换挡杆可信性116.14 P0880 TCU 5V供电/0881 TCU 12V供电 11 6.15 P0900 离合器电磁阀116.16 P0904 选挡位置传感器 116.17 P0914 换挡位置传感器 116.18 P0932 油压传感器 116.18 P2900 模式开关 116.19 P2903 油门踏板故障 126.20 P2906 发动机扭矩故障/2907 发动机最大扭矩故障 126.21 P0933/0942/2901/2712 油路 12 6.22 P0945 油泵继电器及供电 126.23 P2904/2908 离合器故障 126.24 P2905/2909 变速箱故障 126.25 P290A 传感器供电 126.26 P290D 低挡电磁阀/290E 高挡电磁阀 12 6.27 U1601 CAN网络故障 136.28 U1701 ECU网络节点故障 137、故障码表 131、系统简介BYD F0 AMT车型使用了马瑞利公司的Free-Choice换挡控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 稳定性定义有多个 , 其中 Lyapunov 意义下的稳定性是 最基本的一个, 它包括线性系统的稳定性问题.
• 线性系统稳定性属于全局稳定性 , 非线性系统稳定性
则是一个局部性的概念.
3
• 不稳定性并不意味着系统轨迹随时间无限膨胀 , 如
van del Pol系统零平衡点在Lyapunov意义下是不 稳定的 , 但趋于定幅为 2 的运动 , 而不是趋于无限 .
例2:
矢量场: F(x, v)=F(v, -x) 该矢量场产生的流是一个绕原点的旋转.
t(x)
O
19
• 非线性系统 理论2: 非线性系统一般不存在上述三个不变子空间, 但 具有类似不变性质的集合. 将平衡点平移到原点, 记以 原点为中心的一个邻域为 d(0)0, 从其中出发的相轨线 为t(x). 引入三个集合: ns维局部稳定流形Wsloc(0), nu维 局部不稳定流形Wuloc(0), nc维局部中心流形Wcloc(0), 其 中ns+nu+nc=n. Eu Wsloc(0) t<=0t(Wsloc(0))=Ws(0) Wuloc(0) Es Wu(0)=t>=0t(Wuloc(0))
的流等价, 也即存在原点邻域N到另一原点邻域上的同
胚映射 , 以致 etA(y)=(x(t,y)), 即两个系统具有相同 的轨道结构-拓扑等价(共轭).
+Perko L, Differential Equations and Dynamical Systems, Third Edition, Spring-Verlag, 2001
8
2. 平衡点附近轨线结构
1 1 0 E s span{(1, 0, 0), (1,1, 0)} u 1 1 0 例1: A E span(0, 0,1) c E 0 0 2
1 0 0 例2: A 0 0 2 0 2 0
A(x=(1,1), f(x)=(0,-2))
2. 平衡点附近轨线结构
• 微分方程和矢量场是等价的 矢量场由映射F:Unn确定, 矢量场的流解析定义为 (x, t)/t=F((x, t)), (x, 0)=x0
并满足群的性质: (i) 0 =identity, (ii) t+s=t◦s .
• 第二可数是指可数性: 空间的拓扑具有可数拓扑基. • 拓扑基: 设集合M上有一个拓扑, b为该拓扑的一组开集,
使得每个开集可以写成b中成员的并集, 则b叫作该拓扑的
一组拓扑基.
The Hausdorff condighborhoods in n
例2:
V I UV
中心流形方法
金栋平
南京航空航天大学 机械结构力学及控制国家重点实验室 May 05, 2014
1
内容提要
1. 引言
2. 平衡点附近轨线结构
3. 关于不变流形
4. 中心流形方法
2
1. 引言
• 由于实际系统总有干扰或误差, 稳定性的意义在于: 任
何初始扰动导致随后的运动任意小. • 稳定性包括三种: 稳定, 渐近稳定和不稳定.
例如, dx/dt=ax, 解(t, x0)=eatx0满足群的性质, 是流. (t+s, x0)=ea(t+s)x0=eat(easx0)=(t, easx0)=(t, (s, x0)) 问:dx/dt=t满足(0, x)=x的解(t, x)是否定义为一个流? 结论: 非自治系统精确解不满足群的性质, 不能定义为流.
必然是有界的, M上的距离函数定义为d(f,g)=sup|f(x)-g(x)|,
xI. 对于fM, M的子集N为f的邻域, 如对某个正实数e, 所 有与f相距小于、等于e的函数都在N内.
定义1: 拓扑空间M称为n维局部欧式空间n: 若对每一点 xM有邻域U, 以致存在从U到n某开集上的同胚. 我们 称一对(U,:Un)为区图(Chart)、U为坐标邻域或坐标 开集、为U上的坐标映射或坐标系统 . 所有C相容区图 构成C的图册(atlas), 即M= {(Ui, i)}4i=1.
• 稳定和不稳定流形与相应子空间在原点相切. • 流形:降维光滑映射,有严格的数学定义,这里可理解为 相空间中的曲线或曲面,局部看起来就像欧式空间k. • 线性常微分方程系统,其流形为x0或y0的邻域:Ws,uEs,u • Ws,u,c对向量场而言是不变的:若起始点在流形上则整条 相轨迹也在此流形上,统称为不变流形. • Ws,u 是唯一的 , 而 Wc 并不唯一 , 即 limtt(x0) 方向不定 并可能失去光滑性. 例3: 坐标函数y1=f(x1,…,xn)描述了n+1维空间的一个n维子 流形Mn-解析流形. 只要求同胚的映射得到拓扑流形. 还有 复流形, Ck-流形等, 我们这里主要关心光滑流形.
U
S1
对于圆柱面上的开集 O 以及其 内的一点 x, 可找到开集 U 和 V 使得xUVO, 即这些乘积集 合构成圆柱面拓扑的一组基且 是第二可数的. 概括之, 圆柱面 具有“乘积拓扑”.
例3: The cusp y=x2/3 in 2是拓扑流形: 因它是n子空间, 为 Hausdorff且第二可数局部同胚于 借助(x, x2/3) |x.
3. 关于不变流形
拓扑空间公理: 设有一集合M, 对于M的每一“点”x, 选 定一个以M的子集为元素的非空组, 这每个子集叫做x的 一个邻域. 该邻域满足4条公理: (a) x在它自己的每个邻域 里; (b) x的任何两个邻域的交集为x的一个邻域; (c) 若N是 x的邻域, U为M的子集包含N, 则U是x的邻域; (d) 若N是x 的邻域且NO表示集合{zNO|NO是z的邻域}, 则NO是x的邻 域(集合NO叫作N的内部). 这一整套结构叫作一个拓扑空间 . 每点 xM 指定以满足 (a)-(d)的一组邻域, 就叫作在集合上给了一个拓扑结构或 简称拓扑.
例4: The cross in 2不是局部Euclidean, 因而不会是一个 拓扑流形.
定义3: 光滑或C流形为连同最大图册在内的拓扑流形, 该 最大图册也称为M上的微分结构. 要证明拓扑空间是C流形, 只要check: (1) M是第二可 数的Hausdorff空间; (2) M具有C的图册(不必是最大的). • n就是一光滑流形, 它有单个区图(n, r1,…,rn). • 光滑函数图是光滑流形:对于开子集Un和f:Um, 函 数图定义为子空间G(f)={(x, f(x))Um}. 下面两个映射 连续且互为可逆因而同胚: : G(f) U, (x, f(x)) | x
若x0 E s ,则t 时 etA x0 0 若x0 E u , 则t 时 etA x0 若x0 E c ,对任意t,etA x0 保持不变
2. 平衡点附近轨线结构
系统(1): dx/dt=f(x), 解x(t)=x(t,y), x(0)=y 系统(2): dx/dt=Ax+g(x), g(0)=0, Dg(0)=0. 理论1(Hartman-Grobman理论+): 设 f 光滑. 若A=Df(0) 全部特征值有非零实部(双曲平衡点), 则方程(1)和(2)
在这个意义上, 可认为该系统的性能仍是好的.
• 可见膨胀只是不稳定性出现的一种形式 , 而不是唯 一形式.
van del Pol系统相图(m=1):
• 不稳定性意味着 : 只要对于某一个 e不论 d(e)如何小 , 使得起始于初值的轨迹最终要离开球域, 仅仅在这个 意义上才是不稳定的. • 在图示情况下, 可以有另外的概念: 即该平衡点虽不 稳定但具有吸引性.
是否在左半平面判定系统是否稳定. A.M. Lyapunov 1892年发表了著名的博士学位论文 “运动稳定性一般问题”, 通过考察系统能量是否衰 减来判定系统的稳定性, 迄今广泛使用.
主要方法
• 图解法: 自治系统或自激系统, 可用相平面法; 平衡点稳
定性, 可由奇点稳定性判别; 周期运动, 可由极限环稳定性
17
例1: 解出: 和
x(0) ( x0 , y0 )
2 t x 2t t ( x ) xe , ye sinh(2t ) 2 • 流的物理意义
t b
I
(x0, · )
t(U)
0
解曲线t(x0): 固定x0
流t(U): 固定t
2. 平衡点附近轨线结构
12
n
f
n
n
etA(y)=(x(t,y))
etA
etA (y)= f
n
13
• 微分方程, 矢量场和流 (flows) dx/dt=f(x), xn x(x, f(x))定义为相应于上述微分方程的矢量场. 因解(t) 满足((t), d(t)/dt)=((t), f((t))), 故若xn为轨道上的一 点, 则该点的切线为(x, f(x)). 例如
2. 平衡点附近轨线结构
• 线性系统 定义1 设dx/dt=Ax的特征值重数(代数重数)与特征向量
所张成的子空间维数 (几何重数 )相同 (称为半简情况 ).
定义三个子空间:
The stable subspace: Re( r ) 0,E s span{ r1 , r 2 ,, ns } The unstable subspace: Re( r ) 0,E u span{ r1 , r 2 ,, nu } The center subspace: Re( r ) 0,E c span{ r1 , r 2 ,, nc }
x2
e
d e
xe
x0
x1
不稳定但具有吸引性的平衡点
• 线性振动系统:除无阻尼共振情形,所有运动皆稳定. • 非线性系统:不同类型的周期运动可稳定或不稳定.