平衡点的局部特性
【精选】电力系统低频振荡分析与抑制
电力系统低频振荡分析与抑制文献综述一.引言“西电东送、南北互供、全国联网、厂网分开”己成为21世纪前半叶我国电力工业发展的方向。
大型电力系统互联能够提高发电和输电的经济可靠性,但是多个地区之间的多重互联又引发了许多新的动态问题,使系统失去稳定性的可能性增大。
随着快速励磁系统的引入和电网规模的不断扩大,在提高系统静态稳定性和电压质量的同时,电力系统振荡失稳问题也变得越来越突出。
电力系统稳定可分为三类,即静态稳定、暂态稳定、动态稳定。
电力系统发展初期,静态稳定问题多表现为发电机与系统间的非周期失步.电力系统受到扰动时,会发生发电机转子间的相对摇摆,表现在输电线路上就会出现功率波动。
如果扰动是暂时性的,在扰动消失后,可能出现两种情况,一种情况是发电机转子间的摇摆很快平息,另一种情况是发电机转子间的摇摆平息得很慢甚至持续增大,若振荡幅值持续增长,以致破坏了互联系统之间的静态稳定,最终将使互联系统解列。
产生第二种情况的原因一般被认为是系统缺乏阻尼或者系统阻尼为负。
由系统缺乏阻尼或者系统阻尼为负引起的功率波动的振荡频率的范围一般为0。
2~2。
5Hz,故称为低频振荡。
随着电网的不断扩大,静态稳定问题越来越表现为发电机或发电机群之间的等幅或增幅性振荡,在互联系统的弱联络线上表现的尤为突出.由于主要涉及转子轴系的摆动和电气功率的波动,因此也称为机电振荡。
低频振荡严重影响了电力系统的稳定性和机组的运行安全。
如果系统稳定遭到破坏,就可能造成一个或几个区域停电,对人民的生活和国民经济造成严重的损失。
最早报道的互联电力系统低频振荡是20世纪60年代在北美WSCC成立前的西北联合系统和西南联合系统试行互联时观察到的,由于低频振荡,造成联络线过流跳闸,形成了西北联合系统0。
05Hz左右、西南联合系统0。
18Hz的振荡。
随着电网的日益扩大,大容量机组在网中的不断投运,快速、高放大倍数励磁系统的普遍使用,低频振荡现象在大型互联电网中时有发生,普遍出现在各国电力系统中,已经成为威胁电网安全的重要问题。
平衡点分析法
平衡分析法是分析事物之间相互关系的一种方法。
它分析事物之间发展是否平衡,揭示出事物间出现的不平衡状态、性质和原因,指引人们去研究积极平衡的方法,促进事物的发展。
统计平衡分析的主要方法有编制平衡表和建立平衡关系式。
平衡表与一般统计表的区别在于:指标体系必须包括收入与支出,来源与使用两个对应平衡的指标。
平衡表的主要形式有三种,即收付式平衡表、并列式平衡表和棋盘式平衡表,前两种形式如资产负债表、能源平衡表,后一种形式如投入产出表。
平衡关系式是用等式表示各相关指标间平衡关系的式子。
如,期初库存+本期入库=本期出库+期末库存,资产=负债+所有者权益,增加值=总产出-中间投入。
统计中的平衡分析基本要求和特点是:平衡分析要通过有联系指标数值的对等关系来表现经济现象之间的联系;要通过有联系指标数值的比例关系来表现经济现象之间的联系;要通过任务的完成与时间进度之间的正比关系来表现经济现象的发展速度;要通过各有关指标的联系表现出全局平衡与局部平衡之间的联系。
一个广义Lorenz系统平衡点的局部稳定性与全局吸引性

2024 年 3月第 61 卷第 2 期Mar. 2024Vol. 61 No. 2四川大学学报(自然科学版)Journal of Sichuan University (Natural Science Edition)一个广义Lorenz系统平衡点的局部稳定性与全局吸引性祝崇涵1,张付臣1,穆春来2(1.重庆工商大学数学与统计学院/统计智能计算与监测重庆市重点实验室,重庆 400067;2.重庆大学数学与统计学院,重庆 401331)摘要: 本文研究了一个广义 Lorenz 系统的平衡点的稳定性(全局指数稳定、全局渐近稳定)及不稳定的判据,获得了系统的全局吸引性,并推广了已有的一些混沌演化研究方法.关键词: 广义 Lorenz 系统;稳定性;吸引域中图分类号: O175.13 文献标志码: A DOI:10.19907/j.0490-6756.2024.021005 Stability and global attractivity of a generalized Lorenz systemZHU Chong-Han1, ZHANG Fu-Chen1, MU Chun-Lai2(1.School of Mathematics and Statistics / Chongqing Key Laboratory of Statistical Intelligent Computing and Monitoring, Chongqing Technology and Business University, Chongqing 400067, China;2.College of Mathematics and Statistics, Chongqing University, Chongqing 401331, China)Abstract: In this paper,global stability of the equilibrium point of a generalized Lorenz system is studied,sufficient and necessary conditions for the global exponential stability, the global asymptotic stability and the instability of the equilibrium point are given.Meanwhile, global attractivity of the system is considered, some known research methods for the chaotic dynamics are generalized.Keywords: Generalized Lorenz system; Stability; Global attractivity(2010 MSC 37G15)1 引言混沌(Chaos)理论肇始于庞加莱关于三体问题的研究[1,2].1963年,Lorenz[3]在仿真研究天气系统演化模型时发现并提出了Lorenz 混沌系统.此后,一系列论文相继发表,为Lorenz系统的混沌演化行为的研究与应用打下了重要基础[4-9].进而,1999年Chen等[10]提出了Chen混沌系统,该系统与Lorenz 混沌系统拓扑不等价.2002年,Lü等[11]提出了Lü混沌系统,这是一个介于Lorenz混沌系统和Chen混沌系统之间的过渡性混沌系统.此后,大量混沌系统相继被发现和研究.与此同时,混沌系统也被广泛应用于保密通信及电子电路等工程应用领域[12-17].进入21世纪后,将混沌科学的研究成果成功应用于工程实践成为非线性科学的一个研究热点.熟知,Lorenz 混沌系统是一个包含三个变量的常微分系统[3].该系统可被用于描述流体在下方加热、上方冷却的热对流管中的环流运动[12-17],其中的变量x,y,z分别代表流体速度、水平温度差和收稿日期: 2023-02-28基金项目:重庆市自然科学基金(CSTB2022NSCQ-MSX1548);“成渝地区双城经济圈建设”科技创新专项项目(KJCX2020037);重庆市教委科技项目(KJQN202100813; KJQN201800818);重庆市社会经济与应用统计重点实验室项目(ZDPTTD201909);重庆工商大学校内科技项目-青年项目(1952012)作者简介:祝崇涵(1998-), 男 , 四川巴中人, 硕士研究生, 主要研究方向为混沌动力系统. E-mail: 610151651@通讯作者:张付臣.E-mail: zhangfuchen1983@第 2 期祝崇涵,等: 一个广义Lorenz 系统平衡点的局部稳定性与全局吸引性第 61 卷垂直温度差,a 为常数且与流体的Prandtl 数成比例,c 为常数且与流体的Rayleigh 数成比例,b 是与空间相关的常数.受Lorenz 混沌系统的启发,本文研究如下具有五个参数的广义 Lorenz 系统 ìíîïïïïx =a ()y -x ,y =cx -exz -dy ,z =exy -bz(1)在系统(1)中,a 为常数且与流体的Prandtl 数成比例,c 为常数且与流体的Rayleigh 数成比例,b 是与空间相关的常数,d ,e 为扰动参数.系统(1)包含许多经典混沌系统作为特例.例如,当d =e =1时,该系统是Lorenz 混沌系统;当e =1,c =-d -a 时,该系统是Chen 混沌系统;当c =0,e =1,时,该系统是Lu 混沌系统;当a =10+25∂,b =∂+83,c =28-35∂,d =1-29∂,e =1时,该系统为统一混沌系统.显然,S 0(0,0,0)为系统(1)的平衡点.受文献[16]的启发,后文中我们将给出S 0的全局指数稳定、全局渐近稳定和不稳定的充要条件.同时,我们也将把文献[16]的研究方法拓展到广义Lorenz 混沌系统.2 主要结果定理2.1 S 0全局指数稳定当且仅当c <d .证明 必要性.全局指数稳定意味着局部指数稳定.在系统(1)对应的线性化系统中,A =éëêêêêêùûúúúú-a a 0c -d 000-b (2)是Huirwitz 矩阵(所有特征值的实部均是负值)等价于A =éëêêùûú-a a c -d 的两个特征值的实部均为负值,又等价于|A |>0且a +d >0, 即c <d .充分性.令X =(x ,y ,z ). (i ) 当0≤c <d 时,构建Lyapunov 函数V ()X =()d 2a x 2+12y 2+12z 2= ()x y z T éëêêêêêêêêêêêêêêêùûúúúúúúúúd 2a 0001200012()x y z (3)显然,min éëêêùûúúd 2a ,12()x 2+y 2+z 2≤V ()X ≤max éëêêùûúúd 2a ,12()x 2+y 2+z 2.从而有d Vd t|()1=-dx 2-dy 2+()c +d xy -bz 2,=()xy zTéëêêêêêêêêêêêêùûúúúúúúúúúú-d c +d 20c +d 2-d 00-b ()x y z ≤max éëêêùûúúc -d 2,-b ()x 2+y 2+z 2≤max éëêêùûúúc -d 2,-b min éëêêùûúúd 2a ,12V ()X (4)故V (X )≤V (X 0)exp éëêêêêêêêêêêmax éëêêùûúúc -d 2,-b min éëêêùûúúd 2a ,12(t -t 0)ùûúúúúúúúú.则min éëêêd 2a ,12ùûúú(x 2+y 2+z 2)≤V (X )≤ V (x 0)exp éëêêêêêêêêêêmax éëêêùûúúc -d 2,-b min éëêêùûúúd 2a ,12(t -t 0)ùûúúúúúúúú≤ max éëêêd 2a ,12ùûúú(x 2(t 0)+y 2(t 0)+z 2(t 0))⋅ exp éëêêêêêêêêêêùûúúúúúúúúmax éëêêùûúúc -d 2,-b min éëêêùûúúd 2a ,12()t -t 0. 于是()x 2()t +y 2()t +z 2()t ≤max éëêêùûúúd 2a ,12min éëêêùûúúd 2a ,12()x 2()t 0+y 2()t 0+z 2()t 0⋅第 61 卷四川大学学报(自然科学版)第 2 期exp éëêêêêêêêêêêùûúúúúúúúúmax éëêêùûúúc -d 2,-b min éëêêùûúúd 2a ,12()t -t 0.(ii ) 同理,当c <0时,构建Lyapunov 函数V (X )=12(-c ax 2+y 2+z 2).则min éëêê-c 2a ,12ùûúú(x 2+y 2+z 2)≤V (x )≤max éëêê-c 2a ,12ùûúú(x 2+y 2+z 2).故|||d V (X)d t()1=cx 2-dy 2-bz 2≤ max [c ,-d ,-b ](x 2+y 2+z 2) ≤ max []c ,-d ,-b min éëêêùûúú-c 2a ,12V (X (t )).从而(x 2(t )+y 2(t )+z 2(t ))≤max éëêêùûúú-c 2a ,12min éëêêùûúú-c 2a ,12(x 2(t 0)+y 2(t 0)+z 2(t 0))⋅exp éëêêêêêêêêêêmax []c ,-d ,-b min éëêêùûúú-c 2a ,12(t -t 0)ùûúúúúúúúú.证毕.定理2.2 S 0全局渐近稳定且非指数稳定的充要条件是c =d .证明 充分性.由Lyapunov 函数(3),有||||d V (X )d t ()1=-d (x -y )2-b z 2≤0.令d Vd t=0得x =y ,z =0. 上式代入(1)式第3个方程得x =y =z =0, 即d Vd t=0当且仅当x =y =z =0.根据LaSalle 不变理论,S 0全局渐近稳定.必要性.系统(1)的线性化系统存在正实部特征根即意味着S 0是不稳定的,从而系统只有负实部或零实部的特征根.容易排除c >d 的情况.因为如果c >d ,则相关的特征方程为det (λI -A 3×3)=(λ+b )⋅[(λ+a )(λ+d )-ac ]=(λ+b )⋅[λ2+(a +d )λ+a (d -c )].此时A 3×3有正实部特征值λ这与Re λ(A 3×3)≤0矛盾.另一方面,当c <d 时,定理2.1的结论说明系统(1)的线性化系统存在正实部特征根,与假设不符合.因此只有c =d .证毕.定理2.3 S 0是不稳定的(非指数稳定且非渐近稳定)当且仅当c >d .证明 充分性.根据定理2.2中的分析,当c >d 时,系统(1)的线性化系统存在正实部特征根,则系统(1)在S 0附近的动力学行为随时间扩散到无穷远.根据Hartman -Grobman 定理,在S 0附近系统(1)与其对应的线性系统具有相同的动力学定性特性,从而S 0是不稳定的.必要性.定理2.1和定理2.2的逆否命题已经说明,c ≤d 时系统(1)的平衡点S 0指数稳定或渐近稳定,则要使得S 0不稳定只有c >d .证毕.定理2.4 对任意正数a ,b ,d ,λ, 令V λ(X )=x 2+λy 2+λ(z -a +λcλe)2,θ=min (a ,b ,d )>0,X =(x ,y ,z ),L λ=b ()a +λc 2λθe 2.当V λ(X (t ))>L λ,V λ(X (t 0))>L λ时,有V λ(X (t ))-L λ≤[V λ(X (t 0))-L λ]e -θ()t -t 0.从而Ωλ={X |V λ(X )≤L λ}={(x ,y ,z )|x 2+λy 2+λ(z -a +λcλe)2≤L λ}为系统(1)的全局指数吸引集.证明 ∀λ>0,构建Lyapunov -like 函数V λ(X )=x 2+λy 2+λ(z -a +λcλe)2.则有d V λ()X d t =2x d x d t +2λy d yd t+第 2 期祝崇涵,等: 一个广义Lorenz 系统平衡点的局部稳定性与全局吸引性第 61 卷2λ(z -a +λc λe)d zd t=2ax (y -x )+ 2λy (ex -exz -dy )+2λ(z -a +λcλe)= -2ax 2-2dλy 2-2bλz 2+2b ()a +λc ez ≤-ax 2-dλy 2-bλz 2+2b ()a +λc e z =-ax 2-dλy 2-bλ(z -a +λcλe)2+b ()a +λc 2λe 2≤-θV λ(X )+b ()a +λc 2λe 2=-θ[V λ(X )-L λ]<0.从而V λ(X (t ))≤V λ(X 0)e -θ()t -t 0+∫t 0t e-θ()t -t 0L λd t =V λ(X 0)e -θ()t -t 0+L λ[1-e -θ()t -t 0].整理得V λ(X (t ))-L λ≤[V λ(X (t 0))-L λ]e-θ()t -t 0.当t →+∞,取上极限有-------lim t →+∞V λ(X (t ))≤L λ,即Ωλ={X |V λ(X )≤L λ}={(x ,y ,z )|x 2+λy 2+λ(z -a +λcλe)2≤b ()a +λc 2λθe 2}为系统(1)的全局指数吸引集.证毕.3 结论本文研究了一个具有五个参数的广义Lorenz 系统的平衡点的稳定性和全局吸引域,推广了已有的研究方法.本研究可以作为其它混沌系统的平衡点稳定性研究的参考.参考文献:[1]Poincaré J H.Sur le problème des trois corps et les équations de la dynamique [J ].Acta Math , 1890, 13: 1.[2]Poincaré J H.Les Méthodes Nouvelles de la Mécha‑nique Céleste [M ].Paris : Gauthier -Villars , 1892.[3]Lorenz E N.Deterministic non -periods flows [J ].J Atmos Sci , 1963, 20: 130.[4]Ballesteros Á, Blasco A , Musso F.Integrable defor‑mations of Rössler and Lorenz systems from Poisson‑Lie groups [J ].J Differ Equat , 2016, 260: 8207.[5]Coomes B A.The Lorenz system does not have a polynomial flow [J ].J Differ Equat , 1989, 82: 386.[6]Doedel E J , Krauskopf B , Osinga H M.Global orga‑nization of phase space in the transition to chaos in the Lorenz system [J ].Nonlinearity , 2015, 28: 113.[7]Llibre J , Rodrigues A.On the dynamics of the uni‑fied chaotic system between Lorenz and Chen sys‑tems [J ].Int J Bifur Chaos , 2015, 25: 1550122.[8]Zhang F C , Liao X F , Zhang G Y , et al .Dynamical analysis of the generalized Lorenz systems [J ].J Dyn Control Sys , 2017, 23: 349.[9]Zhang F C , Liao X F , Zhang G Y , et al .Dynamical behaviors of a generalized Lorenz family [J ].Disc Con Dyn -B , 2017, 22: 3707.[10]Chen G R , Ueta T.Yet another chaotic attrac‑tor [J ].Int J Bifur Chaos , 1999, 9: 1465.[11]Lü J H , Chen G R , Cheng D Z , et al .Bridge thegap between the Lorenz system and the Chen sys‑tem [J ].Int J Bifur Chaos , 2002, 12: 2917.[12]Zhang F C , Chen R , Wang X Y , et al .Dynamics ofa new 5D hyper -chaotic system of Lorenz type [J ].Int J Bifur Chaos , 2018, 28: 1850036.[13]Chen G R , Lu J H.Dynamics of the Lorenz systemfamily : analysis , control and synchronization [M ].Beijing : Science Press , 2003.[陈关荣, 吕金虎.Lorenz 系统族的动力学分析、控制与同步[M ].北京: 科学出版社, 2003.][14]Yang W L , Wang T N.Theoretical methods and ap‑plications of nonlinear dynamics [M ].Beijing : Na‑tional Defense Industry Press , 2007.[杨万利, 王铁宁.非线性动力学理论方法及应用[M ].北京: 国防工业出版社, 2007.][15]Guan X P , Peng H P , Li X L , et al .ParametersidentificationandcontrolofLorenzchaoticsystem [J ].Acta Physica Sinica , 2001, 50: 26.[关新平, 彭海朋,李丽香,等.Lorenz 混沌系统的参数辨识与控制[J ].物理学报, 2001, 50: 26.][16]Liao X X , Luo Q.Sufficient and necessary conditionsfor Lyapunov stability of Lorenz system and their ap‑plication [J ].Sci China Inf Sci , 2010, 40: 1086.[廖晓昕, 罗琦.Lorenz 混沌系统Lyapunov 稳定性简洁的代数充要条件及其应用[J ].中国科学: 信息科学, 2010, 40: 1086.][17]Zhang F C , Zhou P , Qin J , et al .Dynamics of a gen‑eralized Lorenz -like chaos dynamical systems [J ].J Appl Anal Comput , 2021, 11: 1577.。
系统的平衡点
系统的平衡点
平衡点是当所有的微分同时为0的点动⼒系统中所有状态变量对时间的导数全为零的状态叫做:定态。
定态在相空间中的代表点称为:平衡点。
定点、不动点、平衡点、平稳点、奇点、临界点都是对同⼀客体的不同名称。
他们定义了轨迹上速度为0的点,相对应的系统处在静⽌状态,因为所有变量都是恒定的并且不随时间变化,因此平衡点满⾜⽅程f(x)=0,x即为状态向量的平衡点的值f为线形则系统线形,则只有⼀个平衡点(系统矩阵为⾮奇异的)。
⾮线形系统可能有多个。
平衡点有稳定与不稳定之分,所谓稳定是指系统在受到扰动时偏离平衡点,但仍可以⾃动返回此平衡点;反之,若系统在受到扰动后偏离此运动状态,则称为不稳定平衡点。
平衡点是动态系统⾏为的真实特性,我们可以从它们的特性中得出有关稳定性的结论。
线形系统的稳定性是完全独⽴于输⼊的,也独⽴与有限的初始状态,当系统被⼩⼲扰后仍回到围绕平衡点的⼩区域内,就在该平衡点是局部稳定。
⾮线形系统稳定性取决于输⼊的类型、幅值、和初始状态,这些因素在定义⾮线形系统的稳定性时必须加以考虑。
判断平衡点的稳定性,可以有李雅普诺夫第⼀法和第⼆法,第⼀法⼜叫间接法,是把⾮线性⽅程在平衡点领域内线性化,然后⽤线性⽅程来判断平衡点的稳定性;第⼆法⼜叫直接法,是⽤构造李雅普诺夫函数的⽅法,⽤能量法来判断平衡点的稳定性。
⾮线性⽅程⼀般都⽆法求出解析解,故研究系统的平衡点的稳定性就具有了重要意义,是研究分岔、混沌等复杂动⼒学⾏为的必不可少的⼿段。
零日病毒传播模型及稳定性分析
用背景,有针对性地引入新的节点状态或调整节点 状态转化机制对病毒传播机理进行研究[13-17]。如针 对高级持续性威胁(Advanced Persistent Threat, APT)攻击和病毒潜伏特性,王刚等人[13]引入了潜 伏状态,提出了易感-潜伏-感染-隔离-移除-易感 (Susceptible–Escape-Infected–Quarantine-Removed–Susceptible, SEIQRS)模型,研究了基于潜 伏隔离机制下的病毒传播规律。文献[11]通过研究 一类新型混合攻击病毒,将该类病毒命名为“去二 存一”病毒并在SEIQRS模型的基础上根据该类病 毒的扩散机理,构建了相应的病毒传播模型。Wang 等人[14]考虑到现有的病毒传播模型由于简化近似, 对大型网络中病毒传播分析造成准确性损失这一情 况,构造了离散时间吸收马尔可夫过程来精确地描 述病毒的传播,并通过仿真分析论证了该方法的准 确性。为了更加精准地刻画病毒在智能校园网上的 传播过程,Wang等人[15]考虑感染病毒个体间的差 异性,将病毒感染个体的进化过程扩展到整个网络 中,建立了智能校园网的病毒传播差分模型从而大 大提高了智能校园网的安全性与鲁棒性。文献[16] 在考虑级联故障普遍存在于复杂网络中的这一情 况,提出了基于局部负荷重分配原则的新型级联失 效模型,建立了SIR病毒传播与级联失效的交互模 型:SIR- c模型,为网络拓扑和路由策略的管理和 优化提供了理论参考。文献[17]考虑实际网络中节 点可以随机移动的情况,基于平均场理论提出了一 个移动环境下网络病毒传播的数学模型,并验证了 这一模型的合理性。这些研究揭示了病毒传播的一 般规律,为病毒的有效防控提供了理论基础。然而 不同病毒传播模型有其适用范围,零日病毒传播机 理相对复杂、隐蔽性强、防御难度大且破坏性大, 需要具体问题具体分析,在现有研究成果的基础 上,结合零日病毒特点研究零日病毒的传播规律及 防控手段。
李亚普诺夫方法
麻省理工学院电气工程与计算机科学系6.241:动态系统-2003年秋复习 6李亚普诺夫方法在这一小节中我们将回顾稳定性的概念,并使用李亚普诺夫直接法、间接法对系统平衡点附近的稳定性进行分析。
接下来我们将提供一系列的例子。
稳定性的定义考虑一个自由(时不变)非线性系统,该系统可以描述为()(())x t f x t •=。
这个系统的一个平衡点就是方程的一个根。
因为任意一个平衡点()0f x −=x −不在原点的系统都可以很方便的转化为一个平衡点在原点的相似系统(例如,令z x x −=−),所以在定义中,我们假定所讨论的系统的平衡点在原点。
如果对于任意给定的0ε>,都存在0δ>,使得若0()x t δ<,()x t ε<对于一切都成立,那么称系统在原点附近的平衡点是李亚普诺夫意义下稳定的(i.s.L )。
如果系统在原点附近的平衡点附近是稳定的,并且存在0t t >0α>,使得若0()x t α<,则当时,那么称系统是李亚普诺夫条件下渐近稳定的。
如果t →∞()0x t →lim ()0t x t →∞=在任意初始条件,即0()x t 在状态空间的任意位置都成立,那么系统是全局渐近稳定的。
李亚普诺夫直接法总体说来,证明一个形如()(())x t f x t •=的非线性系统在原点附近的全局渐近稳定性是一个非常困难的工作,其难度相当于在任一初始条件0()x t 下求解()x t 的封闭解的表达式。
对于线性时不变系统(()()()x t Ax t Bu t •=+),我们得到封闭解表达式,即: 00()()()0()()tA t t A t Bu d t x t e x t e τττ−−=+∫ (1)对于任意矩阵A (不论是否可以对角化),当且仅当A 的特征向量全部位于左半开复平面1,线性系统x Ax •=在原点附近是渐近稳定的。
这是由()x t 表达式中的衰减指数项决定的。
基于T细胞和巨噬细胞的HIV感染模型研究
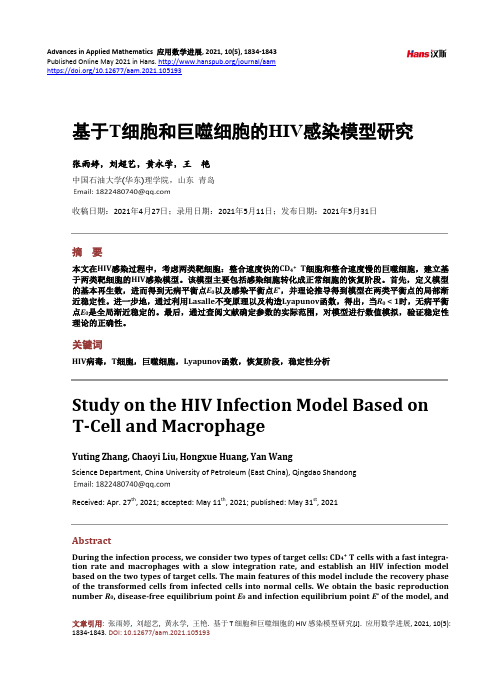
Figure 1. A schematic representation of the model system 图 1. 模型系统的示意图
Advances in Applied Mathematics 应用数学进展, 2021, 10(5), 1834-1843 Published Online May 2021 in Hans. /journal/aam https:///10.12677/aam.2021.105193
Open Access
1. 引言
自 1981 年第一位艾滋病患者出现以来,艾滋病已在全世界传播,成为全球重大公共卫生问题。根据 联合国艾滋病规划署数据[1],全球范围内艾滋病病毒携带者和艾滋病患者人数从 2013 年末的 3430 万人 增至 2018 年末的 3790 万人,携带者数量仍逐年增长。而截至 2019 年底,我国现存 HIV/AIDS 患者约 129 万,2019 年新增感染者 15 万人,死亡 4.2 万人。
β2
x2v
−
δ
2
y2
− a2 y2
= 0
k1 y1 + k2 y2 − cv = 0
(3-1)
对于无病平衡点的求解,不妨设ν = 0 ,那么 y=10
y=20
0 ,ν 0
=
0 。通过化简,得出
x10
=
λ1 d1
,x20
=
λ2 d2
。
( ) 我们可以得到无病平衡点 E0 = x10 , 0, x20 , 0, 0 。
一类具有细胞-细胞传播和免疫损害的HIV-1感染动力学模型

一类具有细胞-细胞传播和免疫损害的HIV-1感染动力学模型徐瑞;宫云英;任华荣
【期刊名称】《高校应用数学学报(A辑)》
【年(卷),期】2024(39)2
【摘要】基于病毒-细胞感染和细胞-细胞传播两种机制,研究一类具有胞内时滞,CTL免疫反应和免疫损害的HIV-1感染动力学模型.通过计算得到了病毒感染基本再生率.通过分析特征方程根的分布,讨论了模型的病毒未感染平衡点和慢性感染平衡点的局部稳定性.通过构造适当的Lyapunov泛函并应用LaSalle不变性原理,证明了模型的全局动力学性态由病毒感染基本再生率完全确定:若基本再生率小于1,则病毒未感染平衡点全局渐近稳定;若基本再生率大于1,则慢性感染平衡点全局渐近稳定.进一步,通过数值模拟说明了理论结果,并对参数进行了敏感性分析,确定了参数对病毒感染基本再生率的影响程度.
【总页数】12页(P163-174)
【作者】徐瑞;宫云英;任华荣
【作者单位】山西大学复杂系统研究所;山西省疾病防控的数学技术与大数据分析重点实验室;山西大学数学科学学院
【正文语种】中文
【中图分类】O175
【相关文献】
1.一类具有细胞与细胞传染和病毒与细胞传染的时滞HIV-1传染病模型
2.一类具有潜伏感染细胞的时滞HIV-1传染病模型
3.一类具有脉冲免疫治疗的HIV-1感染模型的动力学分析
4.一类具有CTL免疫反应和免疫损害的HIV感染动力学模型的稳定性分析
5.具有细胞到细胞感染方式和免疫应答的病毒感染模型动力学分析
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
σNL(x(t), w(t)) = δ|x(t)|2 − |w(t)|2 ≥ 0 。 因为 A 是 Hurwitz 矩阵,所以能够找到 P = P 使得
P A + A P = −I
2
成立。那么对每一常数 τ ≥ 0 ,
σ(x¯, w¯) = σLT I (x¯, w¯) + τ σNL(x¯, w¯)
ky2 = h(y) + h˙ (y)h(y)y 成立。四阶泰勒级数展开为 h(y) = h2y2 + h3y3 + h4y4 + o(y4) , h(y) = 2h2y + 3h3y2 + 4h4y4 + o(y3) , 比较 ODE 两侧 h 的系数可得 h2 = k ,h3 = 0 ,h4 = −2k2 。因此中心流形 ODE 为
如果存在正实数 ,r ,C 使得 |x(0) − x¯0| < 的解 x : [0, T ] → X 满足
|x(t) − x¯0| ≤ Ce−rt|x(0) − x¯0| ∀ t = 0, 1, 2, ....
那么(8.2)的平衡点 x¯0 称为指数稳定的。 定理8.2 假设 a (x¯0) = 0 ,条件(8.3)成立,那么
x˙ 1(t) = −x1(t) + kx2(t)2 x˙ 2(t) = x1(t)x2(t)
5
其中 k 是实参数。本例中 n = 2 , p = q = 1 , Ac = 0 , As = −1 , k 是 任意大的。根据定理8.3,存在 k 次可微函数 h : R → R 使得 x1 = h(x2) 是 ODE 的不变流形(至少在起点的邻域内)。因此对所有足够小的 y 有
σ(x¯, w¯) ≤ −0.5|x¯|2 ,
这就证明了对 |x(t)| < ,不等式
V (x(t)) ≤ −0.5|x(t)|2 ≤ − 2
1 P −1
V (x(t))
成立。因此只要 |x(t)| < 就有
V (x(t)) ≤ e−dtV (x(0)) ∀ t ≥ 0
成立,其中 d = 1/2 p−1 。由于
的平衡点 x¯ = 0 是渐近稳定的(这是根据定理8.1得到的),α = 0 并且 β < 0 时也如此。 α > 0 时平衡点是不稳定的(根据定理8.1得到), α = 0 并且 β > 0 时也一样。另外, α = β = 0 时平衡点是稳定的,但不是渐近稳定的。
8.1.2 定理8.1的证明
(a)的证明可以看作是前面概括给出的“构造能量函数”的习题。事实 上,为了简便起见, x¯ = 0 时,(8.1)可以写成
P · |x(t)| ≥ V (x(t)) ≥ P −1 −1 · |x(t)| ,
这就证明了(a)。 (b)和(c)的证明更加复杂,是以说明开始于 x¯0 + δv 的解不能快速趋
近 x¯0 (在 x¯0 彼此分开)为基础的,其中 v 是对应 A 的非负(严格正)实部 特征值的特征向量。
为证明(b),找一个实数 d ∈ (0, r/2) 使得 A 的任意两个特征值的和不 到 −2d 。那么 P = P 是李亚普诺夫方程
8.2 高阶条件
当(8.1)中 A = a (x¯0) 的行列式在平衡点 x¯0 没有正实部的特征值,但 是有一些特征值位于虚轴上时,稳定性分析会变得更加复杂。基于定理8.1的 证明,自然我们希望与严格稳定特征值相关的系统状态是某种可预测的稳定 形式,那么与虚轴上的特征值相关的系统状态将决定平衡点是局部稳定还是 不稳定。
A = Ac 0 , 0 As
其中 As 是 Hurwitz 矩阵, Ac 的全部特征值实部为零。 定理8.3 令 a : Rn → R 在 x¯0 = 0 的邻域内是 k ≥ 2 次连续可微的。假设 a(0) = 0 并且
a (0) = A = Ac 0 0 As
其中 As 是 Hurwitz p × p 矩阵,q × q 矩阵 Ac 的全部特征值实部为零。那么 (a)存在 > 0 和在起点的邻域内 k−1 次连续可微的函数 h : Rq → Rp 使得 h(0) = 0 , h (0) = 0 ,并且 xs(0) = h(xc(0)) , |xc(0)| < 时,只要 |xc(t)| < ,(8.1)的每一解 x(t) = [xc(t); xs(t)] 都满足 xs(t) = h(x0(t)) ; (b)当且仅当 ODE
= (τ δ − 1)|x¯|2 + 2τ x¯ P w¯ − τ |w¯|2 ≤ (τ δ − 1)|x¯|2 − 2 P · |x¯| · |w¯| − τ |w¯|2 是能量函数 V = VLT I 的供给率,其中 P 是 P 的最大奇异值,当 τ = 16 P 并且 δ = 0.25/τ 时,我们得到
8.1.1 时间连续情况 如果存在正实数 ,r ,C 使得 |x(0) − x¯0| < 的解 x : [0, T ] → X 满足
|x(t) − x¯0| ≤ Ce−rt|x(0) − x¯0| ∀ t ≥ 0 12003年10月3日版
1
那么(8.1)的平衡点 x¯0 称为指数稳定的。 下面的定理可以直接得到李亚普诺夫函数。
lim
t→∞
eγt|x(t)
−
[xc(t);
h(xc(t))]|
=
0
成立。 > 0 足够小时,点集
Mc = {x¯ = [x¯c; h(x¯c)] : |x¯c| < }
称为(8.1)的中心流形。只要能准确计算出定义中心流形的函数 h 或计算到 足够判断(8.4)局部稳定性的程度,定理8.3,通常称为中心流形定理,可以 让我们把待分析系统的维数由 n 降到 q 。 例8.3 这个例子由312页的 Sastry而来。系统
成立。特别地,这意味着如果 x(0) P x(0) ≤ −R < 0 并且 |x(0)| ≤ δ ,那么只 要 |x(t)| ≤ δ ,就有 e2dtx(t) P x(t) ≤ −R 成立,这与速率 r > 2d 的指数稳定 性相矛盾。
(c)的证明和(a)类似。
8.1.3 离散时间情况
针对离散时间情况的结果与定理8.1类似,特征值的实部被它们的绝对值 与 1 的差值替代。
(a)如果 A = a (x¯0) 是舒尔矩阵(也就是 A 的所有特征值的绝对值小 于一),那么 x¯0 是(8.2)的(局部)指数稳定平衡点;
(b)如果 A = a (x¯0) 有一个特征值的绝对值大于 1 ,那么 x¯0 不是(8.2) 的指数稳定平衡点;
(c)如果 A = a (x¯0) 有一个特征值的绝对值严格大于 1 ,那么 x¯0 不是 (8.2)的稳定平衡点。
a
x¯1 x¯2
=
x¯21x¯22 − x¯21 − x¯22)2 x¯21x¯22 + (x¯21 − x¯22)2
x¯1 x¯2
定义,a(0) = 0 时,它关于 x¯1 和 x¯2 在每一点 x¯ ∈ R2 都可微,并且它的行列 式 a (0) = A 为负单位阵。但是,条件(8.3)并不成立(请注意 a (x¯) 在 x¯ = 0 是不连续的)。
(8.3)
成立。
如果 a 中的每个 ak 对 x 中的 xi 求导 dak/dxi 在 x¯0 存在,那么 A 是系 数为 dak/dxi 的矩阵,也就是系统的行列式。但是,在单点 x¯0 的可微并不能 保证(8.3)成立。另一方面,在 x¯0 的邻域内 a 的连续可微却可以得到(8.3)。 例8.1 x¯ = 0 时函数 a : R2 → R2 由
|a(x¯) − Ax¯| ≤ |x¯| for |x¯| ≤ δ
成立。那么只要 x(t) 是(8.1)的解,并且 |x(t)| ≤ δ ,那么
d dt
(e2dtx(t)
P
x(t))
=
e2dt(2dx(t)
P
x(t)+2x(t)
P
Ax(t)+2x(t)
P
(a(x(t))−Ax(t)))
≤ −0.5e2dt|x(t)|2
x¯c(t) = kxc(t)3 + o(xc(t)3) , 这意味着 k < 0 稳定, k > 0 不稳定。
6
dotxc(t) = a([xc(t); h(xc(t))])
(8.4)
的平衡点 x¯c = 0 是局部稳定(渐近稳定)【不稳定】时对(a)中的 每一个函数 h ,(8.1)的平衡点 x¯0 = 0 是局部稳定(渐近稳定)【不 稳定】的;
(c)如果(8.4)的平衡点 x¯c = 0 是稳定的,那么存在常数 r > 0 ,γ > 0 使得 |xc(0)| < r 时对(8.1)的每一解 x = x(t) 有一个(8.4)的解 xc = xc(t) 使得
P (A + dI) + (A + dI)P = −I
的唯一解。请注意 P 是非奇异的:否则,如果对某些 v = 0 有 P v = 0 ,可以 得到
−|v|2 = v (P (A + dI) + (A + dI)P )v = (P v) (A + dI)v + v (A + dI)(P v) = 0 。
x˙ = Ax(t) = Ax(t) + w(t), w(t) = a(x(t)) − Ax(t) 。
这里线性部分有标准能量函数
VLT I (x¯) = x¯ P x¯, P = P ,
对应供给率为
σLT I (x¯, w¯) = 2x¯ P (Ax¯ + w¯) 。
另外,根据(8.3),对每一 δ > 0 存在 > 0 使得只要 |x(t)| < ,非线性部分 w(t) 就满足向量约束