系统辨识习题解答
系统识别试题
系统辨识练习题
一、简述下列各题
1. 什么是系统辨识?系统辨识的组成要素有哪些?系统辨识的基本步骤有哪些?把
系统辨识的基本环节用框图表示出来。
2. 阐述辨识的原理,并以单输入单输出系统为例,画出辨识原理图。
3. 什么是最小二乘参数辨识问题,简单阐述它的基本原理。
4. 基本最小二乘算法有何优缺点?克服基本最小二乘算法的缺陷的方法有哪些?
5. 递推辨识算法的基本格式是什么?构成递推辨识算法的基本条件是什么?
6. 阐述极大似然原理。
7. 现代辨识方法大体上可以分成哪几类? 8. 何谓白噪声?
9. 简述表示定理,并简单说明其意义。
10. 简述巴塞伐尔定理。
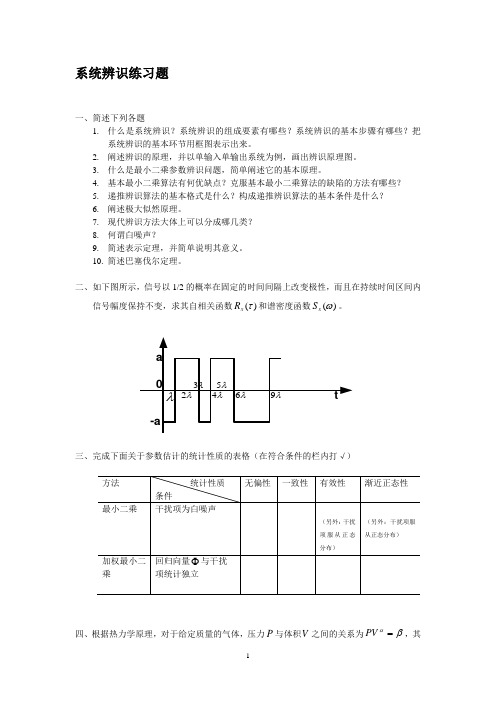
二、如下图所示,信号以1/2的概率在固定的时间间隔上改变极性,而且在持续时间区间内
信号幅度保持不变,求其自相关函数)(τx R 和谱密度函数)(ωx S 。
三、完成下面关于参数估计的统计性质的表格(在符合条件的栏内打√)
四、根据热力学原理,对于给定质量的气体,压力P 与体积V 之间的关系为βα
=PV
,其
中α和β为待定参数。
经实验获得如下一批数据,V 单位为立方英寸,P 的单位为巴每平方英寸
试用一次完成的最小二乘算法确定参数α和β(只要求写出计算过程,不要求计算结果)。
五、 写出加权最小二乘算法的递推公式,并解释如何进行递推计算(包括初始条件如何
确定)? 六、
考虑一个独立同分布的随机过程)}({t x ,在参数θ条件下随机变量x 的概率密度为
0,)|(2>=-θθθθx xe x P
求参数θ的极大似然估计。
中南大学系统辨识及自适应控制试卷3份及答案
2009级本科生 系统辨识及自适应控制 考试题一、 概述系统辨识与自适应控制的关系,以及自适应控制的研究对象和系统辨识的定义?(10分)关系:PPT 1.4图及说明。
自适应控制的研究对象:是具有一定程度不确定性的系统。
系统辨识:就是按规定准则在一类模型中选择一个与数据拟合得最好的模型。
二、描述随机过程统计特性的确定性时间函数有哪些?什么是白噪声,它有哪些特性,有何用途?在系统参数辨识实验中为什么常用M 序列或逆M 序列作为被辨识对象的输入信号?(20分)确定性时间函数有:均值函数、方差函数、均方值函数、相关函数等白噪声:一种均值为零,谱密度为非零常数的平衡随机过程白噪声特性:(1)是一种随机过程信号(2)没有记忆性,任意两时刻之间的值不相关(3)均值为零,方差为常数(4)功率谱密度函数为常数用途:(1)作为系统输入时,为系统的单位脉冲响应(2)作为被辨识系统输入时,可以激发系统的所有模态,可对系统充分激励(3)作为被辨识系统输入时,可防止数据病态,保证辨识精度(4)产生有色噪声原因:白噪声是一种理想的随机过程,若做为系统辨识的输入信号,则过程的辨识精度将大大提高,但是白噪声在工程上难以实现,因为工业设备无法按白噪声的变化特性运行。
M 序列与白噪声性质相近,保留了其优点,工业上可以接受。
但是M 序列含有直流成分,将造成对辨识系统的“净扰动”,而逆M 序列将克服这一缺点,是一种比M 序列更为理想的伪随机码序列。
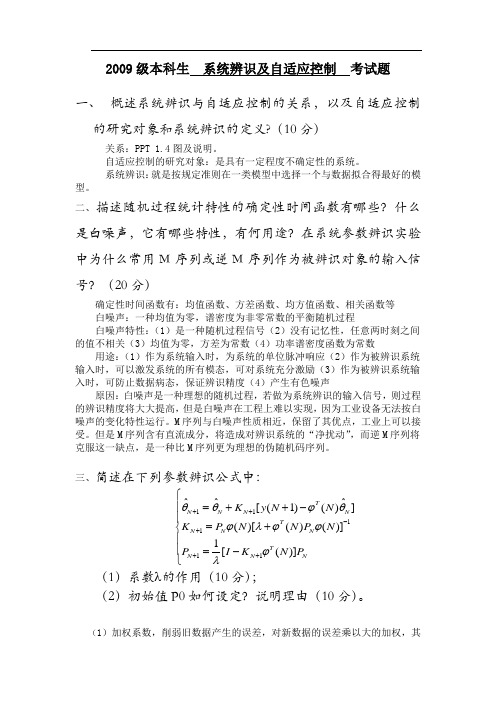
三、简述在下列参数辨识公式中:111111ˆˆˆ[(1)()]()[()()]1[()]T N N N N T N N N T N N N K y N N K P N N P N P I K N P θθϕθϕλϕϕϕλ++-+++⎧⎪=++-⎪=+⎨⎪⎪=-⎩(1)系数λ的作用(10分);(2)初始值P0如何设定?说明理由(10分)。
(1)加权系数,削弱旧数据产生的误差,对新数据的误差乘以大的加权,其值愈小,跟随时变参数的能力就愈强,但参数估计精度愈低。
系统辨识试卷A参考答案
襄樊学院2008-2009学年度上学期《系统辨识》试题A卷参考答案及评分标准一、选择题:(从下列各题的备选答案中选出一个或几个正确答案,并将其代号写在题干后面的括号内。
答案选错或未选全者,该题不得分。
每空2分,共12分)1、(C)2、(D)3、(ACD)4、(D)5、(A)6、(ABC)二、填空题:(每空2分,共14分)1、计算。
2、阶次和时滞3、极大似然法和预报误差法4、渐消记忆的最小二乘递推算法和限定记忆的最小二乘递推算法三、判断题(下列命题你认为正确的在题后括号内打“√”;错误的打“×”并改正;每小题2分,共20分)(注:正确的题目括号内打“√”得2分,打“×”得0分;错误的题目括号内打“×”得1分,改正正确再得1分,错误的题目括号内打“√”得0分;)1、(√)2、(×)参数型→非参数型3、(√)4、(×)没有→有5、(√)6、(×)考虑→基本不考虑7、(√)8、(√)9、(×)完全相同→不完全相同 10、(×)不需要→需要四、简答题:(回答要点,并简明扼要作解释,每小题6分,共18分)1、答:相关分析法的主要优点是由于M序列信号近似于白噪声,噪声功率均匀分布于整个频带,从而对系统的扰动甚微,保证系统能正常工作(1.5分)。
此外。
因为相关函数的计算是一种统计平均的方法,具有信息滤波的功能,因此,在有噪声污染下,仍可提取有用信息,准确地求出系统的脉冲响应(1.5分)。
相关辨识技术在工程中的应用、可归结为下述几个方面:(1)系统动态特性的在线测试。
包括机、炉、电等一次设备,风机、水泵等辅机以及二次自动控制系统;(1分)(2)对控制系统进行在线调试,使调节系统参数优化;(1分)(3)自适应控制中的非参数型模型辨识等。
(1分)2、答:计算中用一个数值来表示对观测数据的相对的“信任程度”,这就是权。
(2分)对于时变参数系统,其当前的观测数据最能反映被识对象当前的动态特性,数据愈“老”,它偏离当前对象特性的可能性愈大。
系统辨识习题解答(最新)

系统辨识习题解答1-14、若一个过程的输入、输出关系可以用MA 模型描述,请将该过程的输入输出模型写成最小二乘格式。
提示:①提示:① MA MA 模型z k D z u k ()()()=-1②定义tt q )](,),1(),([)(,],,,[10n k u k u k u k d d d n --== h 解:因为MA 模型z k D z u k ()()()=-1,其中n n z d z d d z D ---+++= 1101)(,从而)()1()()(10n k u d k u d k u d k z n -++-+= 所以当定义t t q )](,),1(),([)(,],,,[10n k u k u k u k d d d n --== h ,则有最小二乘格式:)()()()()(0k e k h k e k h d k z ni i i +=+=å=q t,其中e(k)e(k)是误差项。
是误差项。
2-3、设)}({k e 是一个平稳的有色噪声序列,为了考虑这种噪声对辨识的影响,需要用一种模型来描述它。
请解释如何用白噪声和表示定理把)(k e 表示成AR 模型、MA 模型和ARMA 模型。
解:根据表示定理,在一定条件下,有色噪声e(k)可以看成是由白噪声v(k)驱动的线性环节的输出,该线性环节称为成形滤波器,其脉冲传递函数可写成)()()(111---=z C z D z H 即)()()()(11k v z D k e z C --=其中cc n n zc z c z C ---+++= 1111)(dd nn zd z d z D ---+++= 1111)(根据其结构,噪声模型可区分为以下三类:根据其结构,噪声模型可区分为以下三类:自回归模型(自回归模型(AR AR 模型): )()()(1k v k e z C =- 平均滑动模型(平均滑动模型(MA MA 模型): )()()(1k v z D k e -= 自回归平均滑去模型(自回归平均滑去模型(ARMA ARMA 模型): )()()()(11k v z D k e z C --=3-4、根据离散Wiener-Hopf 方程,证明å-=D -D +=10221P N j P P P Mz j g N t a k g N t a N k R )(ˆ)(ˆ)()(解:由于M 序列是循环周期为t N P D ,12-=PP N ,t D 为M 序列移位脉冲周期,自相关函数近似于d 函数,a 为M 序列的幅度。
系统辨识理论及应用(课后题答案第三章3.2、3.3)国防工业出版社

1、系统辨识——连续系统传递函数——脉冲传递函数function h=Continuous_system_transferFcn(N,G,dt)% N——系统阶数% G——采样数据(个数大于等于2N+1)% G为一维行向量% dt——采样间隔if nargin<3errordlg('not enough input varibles','error hint');elseg_NN=zeros(N,N);for i=1:Ng_NN(i,:)=G(i+1:i+1+N-1);endg_N=-G(1:N)';a=inv(g_NN)*g_N;%% x的求解syms xfor i=1:NX(i)=x^i;endf=X*a+1;x=double(solve(f));%%极点的求解p=log(x)/dt;c_NN=zeros(N,N);for i=1:Nc_NN(i,:)=x.^(i-1);endc_N=G(1:N)';%%增益求解k=inv(c_NN)*c_N;pkz=zeros(1,N);p=p';k=k';Continuous_TransferFcn=0;for i=1:NContinuous_TransferFcn=Continuous_TransferFcn+zpk(z(i),p(i),k(i)); endContinuous_TransferFcnendend例题 3.1(P32)>>G=[0 0.1924 0.2122 0.1762];>> N=2;>> dt=1;>> Continuous_system_transferFcn(N,G,dt) p =-0.4934-0.7085k =1.6280-1.6280Continuous_TransferFcn =0.35024 s---------------------(s+0.4934) (s+0.7085)Continuous-time zero/pole/gain model.习题3.2(P34)>> G=[0 0.196 0.443 0.624 0.748 0.831]; >> N=3;>> dt=0.2;>> Continuous_system_transferFcn(N,G,dt) p =-0.0633-1.7846-11.1860k =1.1249-1.33990.2150Continuous_TransferFcn =-0.08507 s (s-253.1)-------------------------------(s+0.06329) (s+1.785) (s+11.19) Continuous-time zero/pole/gain model.2 系统辨识——离散系统传递函数——脉冲传递函数function h=Discrete_system_transferFcn(N,G,dt)% N——系统阶数% G——采样数据(个数大于等于2N+1)% G为一维行向量% dt——采样间隔if nargin<3errordlg('not enough input varibles','error hint');elseg_NN=zeros(N,N);for i=1:Ng_NN(i,:)=G(i+1:i+1+N-1);endg_N=-G(N+2:2*N+1)';a1=inv(g_NN)*g_N;a=zeros(N,1);for j=1:Na(j,1)=a1(N+1-j,1);endB=zeros(N+1,N+1);B=diag(linspace(1,1,N+1));for i=1:N+1for j=1:N+1if (i==j)&(i<N+1)&(j<N+1)B(i+1:N+1,j)=a(1:N+1-i,1);endendendg__N=G(1:N+1)';b=B*g__N;abnum=b';den=[1 a'];Discrete_TransferFcn=tf(num,den,dt);Discrete_TransferFcnendend例题 3.2(P33)>> G=[0 7.157039 9.491077 8.563839 5.930506 2.845972 0.144611]; >> N=3;>> dt=0.05;>> Discrete_system_transferFcn(N,G,dt)a =-2.23001.7606-0.4950b =7.1570-6.4691-0.0009Discrete_TransferFcn =7.157 z^2 - 6.469 z - 0.0008933--------------------------------z^3 - 2.23 z^2 + 1.761 z - 0.495Sample time: 0.05 secondsDiscrete-time transfer function.习题3.3(P34)>> G=[10 6.989 4.711 3.136 2.137 1.559 1.252 1.096 0.938 0.860]; >> N=3;>> dt=0.1;>> Discrete_system_transferFcn(N,G,dt)a =-2.19191.7166-0.4794b =10.0000-14.92956.55810.0139Discrete_TransferFcn =10 z^3 - 14.93 z^2 + 6.558 z + 0.01389--------------------------------------z^3 - 2.192 z^2 + 1.717 z - 0.4794Sample time: 0.1 secondsDiscrete-time transfer function.。
系统辨识作业及答案
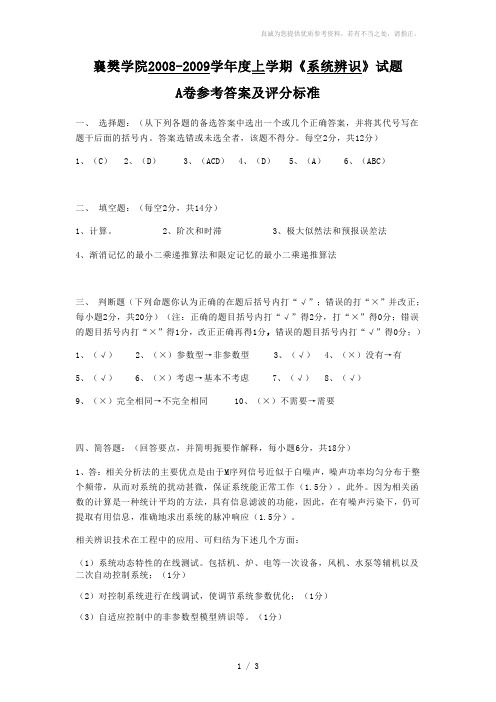
一. 问答题1. 介绍系统辨识的步骤。
答:(1)先验知识和建模目的的依据;(2)实验设计;(3)结构辨识;(4)参数估计;(5)模型适用性检验。
2. 考虑单输入单输出随机系统,状态空间模型[])()(11)()(11)(0201)1(k v k x k y k u k x k x +=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=+ 转换成ARMA 模型。
答:ARMA 模型的特点是u(k)=0,[])()(11)()(0201)1(k v k x k y k x k x +=⎥⎦⎤⎢⎣⎡=+3. 设有一个五级移位寄存器,反馈取自第2级和第3级输出的模2加法和。
试说明:(1) 其输出序列是什么? (2) 是否是M 序列?(3) 它与反馈取自第4级与第3级输出模2加法和所得的序列有何不同? (4) 其逆M 序列是什么? 答:(1)设设输入序列1 1 1 1 1111018110107101006010015100114001113011112111111)()()()()()()()(()()()()()()()01110161110115110101410100)13(010011210011110011110011109()()()()()()()001112401110)23(111012211010211010020010011910011180011117()()()()()()()()10011320011131011103000111291101028101002701001261001125 其输出序列为:1 1 1 1 1 0 0 1 0 1⑵不是M 序列⑶第4级与第3级模2相加结果100108001007010006100015000114001113011112111111)()()()()()()()(()()()()()()()11110161110115110101410101)13(010111210110110110010110019()()()()()()()110012410010)23(001002201000211000120000111900111180111117()()()()()()()()01111321111031111013011010291010128010112710110260110025 不同点:第2级和第3级模二相加产生的序列,是从第4时刻开始,每隔7个时刻重复一次;第4级与第3级模2相加产生的,序列,是从第2时刻开始每隔15个时刻重复一次。
系统辩识作业题
系统辨识大作业
一.设SlSO系统差分方程为
y(k)=—α1y(k-1)-a2y(k-2)+bλu(k-1)+b2u(k-2)+ξ{k)
辨识参数向量为θ=[q a2b l b2]r,输入输出数据详见数据文件UyLtXt—uy3.txtoξ(k)为噪声方差各异的白噪声或有色噪声。
试求解:
1)用n元一次方程解析法,再求其平均值方法估计。
2)用最小二乘及递推最小二乘法估计。
;
3)用辅助变量法及其递推算法估计
4)用广义最小二乘法及其递推算法估计
5)用夏氏偏差修正法、夏氏改良法及其递推算法估计
6)用增广矩阵法估计
7)分析噪声父攵)特性;
二.用极大似然法估计6。
三.以上题的结果为例,进行:
1.分析比较各种方法估计的精度;
2.分析其计算量;
3.分析噪声方差的影响;
4.比较白噪声和有色噪声对辨识的影响。
四.系统模型阶次的辨识:
1.用三种方法确定系统的阶次并辨识;
2.分析噪声对定阶的影响;
3.比较所用三种方法的优劣及有效性;
五.给出由正弦输入求取系统开环频率响应特性曲线的辨识方法。
六.提出一种自己创造的辨识新方法,并用所给数据进行辨识验证。
注:闭卷考试时提交大作业报告。
系统辨识例题
系统辨识例题注:红色标出的不太确定;本答案仅供参考。
一、选择题1、下面哪个数学模型属于非参数型(D )A 、微分方程B 、状态方程C 、传递函数D 、脉冲响应函数2、频谱覆盖宽、能量均匀分布是下面哪种信号的特点(D )A 、脉冲信号B 、斜坡信号C 、阶跃信号D 、白噪声信号3、下面哪些辨识方法属于系统辨识的经典方法(ACD )A 、阶跃响应法B 、最小二乘法C 、相关分析法D 、频率响应法二、填空题1. SISO 系统的结构辨识可归结为确定(阶次)和(时滞)2. 通过图解和(计算)方法,可以由阶跃响应求出系统的传递函数3. 多变量线性系统辨识的步骤是()4. (渐消记忆)的最小二乘递归算法和(限定记忆)的最小二乘递推算法都成为实时辨识算法5. 遗传算法中变异概率选取的原则是(变异概率一般取得比较小,在0.001~0.01之间,变异概率越大,搜索到全局最优的可能性越大,但收敛速度越慢)6. 模型中含有色噪声时可采用(增广最小二乘)和(广义最小二乘)辨识方法7. 最小二乘法是(极大似然法)和(预报误差法)的特殊情况三、判断题1. 机理建模这种建模方法也称为“白箱问题”。
(√)2. 频率响应模型属于参数模型。
(×)非参数3. 白噪声和M 序列是两个完全相同的概念。
(×)不完全相同4. 渐消记忆法适合有记忆系统。
(×)5. 增长记忆估计算法给予新、老数据相同的信度。
(√)6. 最小二乘法考虑参数估计过程中所处理的各类数据的概率统计特性。
(×)基本不考虑7. 系统辨识不需要知道系统的阶次。
(×)需要8. 自变量是可控变量时,对变量间关系的分析称为回归分析。
(√)9. Newton-Raphson 方法就是随机梯度法。
(×)10. 模型验证属于系统辨识的基本内容。
(√)四、简答题1. 举例说明数学模型的定义及用途。
数学模型:以数学结构的形式反映过程的行为特性(代数方程、微分方程、差分方程、状态方程等参数模型)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数据向量he(k)包含着不可测的噪声量,这可用相应的估计值代替:
其中,
则可写出利用增广最小二乘法得到的递推算法:
θ可表示成:
4-19、考虑如下模型
其中,u(k)和z(k)分别为模型的输入和输出变量,它们是可测的;v(k)是零均值白噪声,它是不可测的。试从Markov估计概念出发,证明该模型的参数向量 的估计值 可以写成如下加权最小二乘算法的形式 ,
式中, 为数据矩阵, 为输出向量,加权矩阵取 ,其中矩阵C为
解:令
及
则模型化成最小二乘格式:
准则函数取 ,其中 为加权因子,对所有的k, 都必须大于零。
对于 (L为数据长度),可以构成线性方程组
式中
则 ,式中 为加权矩阵,它是正定的对角阵,由加权因子 构成
,
设 使得J(θ)最小,则有:
从而:
,
当 是正则矩阵时,模型的加权最小二乘解为
系统辨识习题解答
1-14、若一个过程的输入、输出关系可以用MA模型描述,请将该过程的输入输出模型写成最小二乘格式。
提示:①MA模型
② 定义
解:因为MA模型 ,其中
,从而
所以当定义 ,则有最小二乘格式:
,
其中e(k)是误差项。
2-3、设 是一个平稳的有色噪声序列,为了考虑这种噪声对辨识的影响,需要用一种模型来描述它。请解释如何用白噪声和表示定理把 表示成AR模型、MA模型和ARMA模型。
。
由于 , ,
所以
由Markov估计, ,其中矩阵C为
,
取加权阵 。
P532/4:解:(1)由参数估计值偏差的估计式:
我们有:
(A)
由于 为独立同分布,均值为零的不相关随机变量,因此有:
对(A)式两边求期望值,我们有:
由此递归式子,可得: (B)
(2)由指标的估计式:
将初值 和(B)式代入,两边取对数,有:
解:由于M序列是循环周期为 , , 为 序列移位脉冲周期,自相关函数近似于 函数, 为 序列的幅度。设数据的采样时间等于 ,则离散Wiener-Hopf方程为:
当 序列的循环周期 大于过程的过渡过程时间时,即 充分大时,离散Wiener-Hopf方程可写成:
由于M序列的自相关函数为
,
代入上式得
4- 证明:
解:根据表示定理,在一定条件下,有色噪声e(k)可以看成是由白噪声v(k)驱动的线性环节的输出,该线性环节称为成形滤波器,其脉冲传递函数可写成
即
其中
根据其结构,噪声模型可区分为以下三类:
自回归模型(AR模型):
平均滑动模型(MA模型):
自回归平均滑去模型(ARMA模型):
3-4、根据离散Wiener-Hopf方程,证明
(1)
(2) ,
(3) ,
(4) ,
解:(1)由于
,
所以
(2)由于
,
及
(3)由于
,
所以
(4)由于
,
所以
4-18、考虑如下模型
其中,u(k)和z(k)是模型的输入输出变量,v(k)是零均值白噪声。定义参数向量
请利用增广最小二乘思想,写出模型参数 的递推辨识算法。
解:令
及
则模型化成最小二乘格式:
令 ,及
证毕。