陈世民理论力学简明教程(第二版)答案第五张_刚体力学
陈世民理论力学简明教程(第二版)课后答案

第零章 数学准备一 泰勒展开式1 二项式得展开()()()()()m 23m m-1m m-1m-2f x 1x 1mx+x x 23=+=+++K !!2 一般函数得展开()()()()()()()()230000000f x f x f xf x f x x-x x-x x-x 123!''''''=++++K !!特别:00x =时,()()()()()23f 0f 0f 0f x f 0123!x x x ''''''=++++K!!3 二元函数得展开(x=y=0处)()()00f f f x y f 0x+y x y ⎛⎫∂∂=++ ⎪∂∂⎝⎭,22222000221f f f x 2xy+y 2x x y y ⎛⎫∂∂∂++ ⎪ ⎪∂∂∂∂⎝⎭K !评注:以上方法多用于近似处理与平衡态处得非线性问题向线性问题得转化。
在理论力问题得简单处理中,一般只需近似到三阶以内。
二 常微分方程1 一阶非齐次常微分方程: ()()x x y+P y=Q通解:()()()P x dx P x dx y e c Q x e dx -⎛⎫⎰⎰=+ ⎪⎝⎭⎰ 注:()()(),P x dxP x dx Q x e dx ⎰±⎰⎰积分时不带任意常数,()x Q 可为常数。
2 一个特殊二阶微分方程2y A y B =-+&& 通解:()02By=Kcos Ax+Aθ+注:0,K θ为由初始条件决定得常量 3 二阶非齐次常微分方程()x y ay by f ++=&&&通解:*y y y =+;y 为对应齐次方程得特解,*y 为非齐次方程得一个特解。
非齐次方程得一个特解 (1) 对应齐次方程0y ay by ++=&&&设x y e λ=得特征方程2a b 0λλ++=。
理论力学课后答案第五章
第五章思考题5.1虚功原理中的“虚功”二字作何解释?用虚功原理理解平衡问题,有何优点和缺点?5.2 为什么在拉格朗日方程中,a θ不包含约束反作用力?又广义坐标与广义力的含义如何?我们根据什么关系由一个量的量纲定出另一个量的量纲?5.3广义动量a p 和广义速度a q &是不是只相差一个乘数m ?为什么a p 比aq &更富有意义? 5.4既然aq T &∂∂是广义动量,那么根据动量定理,⎪⎪⎭⎫ ⎝⎛∂∂αq T dt d &是否应等于广义力a θ?为什么在拉格朗日方程()14.3.5式中多出了a q T ∂∂项?你能说出它的物理意义和所代表的物理量吗?5.5为什么在拉格朗日方程只适用于完整系?如为不完整系,能否由式()13.3.5得出式()14.3.5?5.6平衡位置附近的小振动的性质,由什么来决定?为什么22s 个常数只有2s 个是独立的?5.7什么叫简正坐标?怎样去找?它的数目和力学体系的自由度之间有何关系又每一简正坐标将作怎样的运动?5.8多自由度力学体系如果还有阻尼力,那么它们在平衡位置附近的运动和无阻尼时有何不同?能否列出它们的微分方程?5.9 dL 和L d 有何区别?a q L ∂∂和aq L ∂∂有何区别? 5.10哈密顿正则方程能适用于不完整系吗?为什么?能适用于非保守系吗?为什么?5.11哈密顿函数在什么情况下是整数?在什么情况下是总能量?试祥加讨论,有无是总能量而不为常数的情况?5.12何谓泊松括号与泊松定理?泊松定理在实际上的功用如何?5.13哈密顿原理是用什么方法运动规律的?为什么变分符号δ可置于积分号内也可移到积分号外?又全变分符号∆能否这样?5.14正则变换的目的及功用何在?又正则变换的关键何在?5.15哈密顿-雅可比理论的目的何在?试简述次理论解题时所应用的步骤.5.16正则方程()15.5.5与()10.10.5及()11.10.5之间关系如何?我们能否用一正则变换由前者得出后者?5.17在研究机械运动的力学中,刘维定理能否发挥作用?何故?5.18分析力学学完后,请把本章中的方程和原理与牛顿运动定律相比较,并加以评价.第五章思考题解答5.1 答:作.用于质点上的力在任意虚位移中做的功即为虚功,而虚位移是假想的、符合约束的、无限小的.即时位置变更,故虚功也是假想的、符合约束的、无限小的.且与过程无关的功,它与真实的功完全是两回事.从∑⋅=ii i r F W ρρδδ可知:虚功与选用的坐标系无关,这正是虚功与过程无关的反映;虚功对各虚位移中的功是线性迭加,虚功对应于虚位移的一次变分.在虚功的计算中应注意:在任意虚过程中假定隔离保持不变,这是虚位移无限小性的结果.虚功原理给出受约束质点系的平衡条件,比静力学给出的刚体平衡条件有更普遍的意义;再者,考虑到非惯性系中惯性力的虚功,利用虚功原理还可解决动力学问题,这是刚体力学的平衡条件无法比拟的;另外,利用虚功原理解理想约束下的质点系的平衡问题时,由于约束反力自动消去,可简便地球的平衡条件;最后又有广义坐标和广义力的引入得到广义虚位移原理,使之在非纯力学体系也能应用,增加了其普适性及使用过程中的灵活性.由于虚功方程中不含约束反力.故不能求出约束反力,这是虚功原理的缺点.但利用虚功原理并不是不能求出约束反力,一般如下两种方法:当刚体受到的主动力为已知时,解除某约束或某一方向的约束代之以约束反力;再者,利用拉格朗日方程未定乘数法,景观比较麻烦,但能同时求出平衡条件和约束反力.5.2 答 因拉格朗日方程是从虚功原理推出的,而徐公原理只适用于具有理想约束的力学体系虚功方程中不含约束反力,故拉格朗日方程也只适用于具有理想约束下的力学体系,αθ不含约束力;再者拉格朗日方程是从力学体系动能改变的观点讨论体系的运动,而约束反作用力不能改变体系的动能,故αθ不含约束反作用力,最后,几何约束下的力学体系其广义坐标数等于体系的自由度数,而几何约束限制力学体系的自由运动,使其自由度减小,这表明约束反作用力不对应有独立的广义坐标,故αθ不含约束反作用力.这里讨论的是完整系的拉格朗日方程,对受有几何约束的力学体系既非完整系,则必须借助拉格朗日未定乘数法对拉格朗日方程进行修正.广义坐标市确定质点或质点系完整的独立坐标,它不一定是长度,可以是角度或其他物理量,如面积、体积、电极化强度、磁化强度等.显然广义坐标不一定是长度的量纲.在完整约束下,广义坐标数等于力学体系的自由度数;广义力明威力实际上不一定有力的量纲可以是力也可以是力矩或其他物理量,如压强、场强等等,广义力还可以理解为;若让广义力对应的广义坐标作单位值的改变,且其余广义坐标不变,则广义力的数值等于外力的功由W q r F s i ni i δδθδααα==⋅∑∑==11ρρ知,ααδθq 有功的量纲,据此关系已知其中一个量的量纲则可得到另一个量的量纲.若αq 是长度,则αθ一定是力,若αθ是力矩,则αq 一定是角度,若αq 是体积,则αθ一定是压强等.5.3 答 αp 与αq &不一定只相差一个常数m ,这要由问题的性质、坐标系的选取形式及广义坐标的选用而定。
陈世民理论力学简明教程(第二版)课后答案-精选.pdf

。
解:建立自然坐标系有:
a
d e
dt
2
en
且: d
dt d
2
2k
2kd
ds 2k
dt
ds 2k
ds dt
d
d 2k
dt
积分得: ue 2k (代入 0 u ) 又因为: y 2 2px 在 (p 2 ,p) 点处斜率:
k 1 dy1
d 2px
dx
x
p 2
dx
在 ( p 2 , p) 点处斜率:
p 1
水平线之间的夹角又为 角度时所需时间。
解:依牛顿第二运动定律有: m x mk x , m y mg mk y
积分并代入初始条件: t 0 时: 0x 0 sin , 0 y
解得: x 0 cos e kt , y ( 0 sin
g )e
kt
g
k
k
当再次夹角为 时: y tan
x
0 cos
可解出: t
无滑动地滚动,如图所示,求圆盘边上 M点的深度 υ和加速度 α(用
参量 θ,Ψ表示)。
解:依题知:
Байду номын сангаас
r Rr
r Rr
且 O点处: ek cos( )er sin( )e
则:
rM rO O rOM
(R r)eR rer
[(R r)cos(
) r]er (R r)sin(
)e
rM
rM (
)sin(
)er [(R r)cos(
由 r e t,
t 得: r e t ,
且设: rer r e
则: 得: e
en
r2
2
F__学习_陈世民理论力学简明教程(第二版)答案_第六章
(R − r) g [m1 tan ϕ − m1 tan θ − m2 tan ϕ − m2 tan θ ] cos ϕ cos θ
r (R − r) − r
2 2
代入 tan ϕ = 得: tan θ =
=
r R − 2 Rr
2
m1 − m2 tan ϕ m1 + m2
θ = arctan
(m1 − m2 )r (m1 + m2 ) R 2 − 2 Rr
t =0
=
2 6 r 3
皮周长: l = 3d + 2π r = 3 3 4r 2 − h2 + 2π r 依虚功原理: δW = mgδ h + FT δl = mgδ h − 则依: 代入: 得: FT =
δW 3 3h = mg − FT = 0 δh 4r 2 − h 2
h
t =0
3 3h 4r 2 − h 2
2 & 积分得: θ =
&
2m g 2m + m′r
4mgθ (2m + m′ )r
L r
& 当完全释放( θ = )时: ω = θ
L θ= r
=
2 mgl r 2m + m′
ks 2 , s 为绳子的伸长 2
8 .上题中,如果绳子具有弹性,弹性势能为
证明重物 m 的运动为维持恒定的加速运动上附加一角频率为 ω 的 振动。其中 ω 2 = k
微振动,取近似 sin θ : θ , 得:
积分: 则: T( = 周期 )
θ = A cos(
m + 2m′g t) + B m + 4m′ l
(A ,B 为积分常数)
第五章刚体力学参考答案

一、选择题[ C ]1、如图所示,A 、B 为两个相同的绕着轻绳的定滑轮.A 滑轮挂一质量为M 的物体,B 滑轮受拉力F ,而 且F =Mg .设A 、B 两滑轮的角加速度分别为βA 和βB ,不计滑轮轴的摩擦,则有(A) βA =βB . (B) βA >βB .(C) βA <βB . (D) 开始时βA =βB ,以后βA <βB .图5-18参考答案:设定滑轮半径为R,转动惯量为J ,如图所示,据刚体定轴转动定律M=Jβ有: 对B :FR=MgR= J βB .对A :Mg-T=Ma TR=J βA, a=R βA, 可推出:βA <βB[ D ]2、如图5-8所示,一质量为m 的匀质细杆AB ,A 端靠在粗糙的竖直墙壁上,B 端置于粗糙水平地面上而静止.杆身与竖直方向成θ角,则A 端对墙壁的压力大小(A) 为 41mg cos θ. (B)为21mg tg θ. (C) 为 mg sin θ. (D) 不能唯一确定.[ C ]3、一圆盘正绕垂直于盘面的水平光滑固定轴O 转动,如图5-11射来两个质量相同,速度大小相同,方向相反并在一条直线上的子弹,子弹射入圆盘并且留在盘内,则子弹射入后的瞬间,圆盘的角速度ω(A) 增大. (B) 不变. (C) 减小. (D) 不能确定.图5-8m图5-11参考答案:把三者看作同一系统时,系统所受合外力矩为零, 系统角动量守恒。
设L 为每一子弹相对固定轴O 的角动量大小.故由角动量守恒定律得: J ω0+L-L=(J+J 子弹) ω ω <ω0[ A ]4、质量为m 的小孩站在半径为R 的水平平台边缘上.平台可以绕通过其中心的竖直光滑固定轴自由转动,转动惯量为J .平台和小孩开始时均静止.当小孩突然以相对于地面为v 的速率在台边缘沿逆时针转向走动时,则此平台相对地面旋转的角速度和旋转方向分别为(A) ⎪⎭⎫ ⎝⎛=R J mR v 2ω,顺时针. (B) ⎪⎭⎫⎝⎛=R J mR v 2ω,逆时针.(C) ⎪⎭⎫ ⎝⎛+=R mR J mR v 22ω,顺时针. (D) ⎪⎭⎫⎝⎛+=R mR J mR v 22ω,逆时针.参考答案:视小孩与平台为一个系统,该系统所受的外力矩为零,系统角动量守恒:0=Rmv-J ω 可得结论。
物理学简明教程第五章课后习题答案 高等教出版社
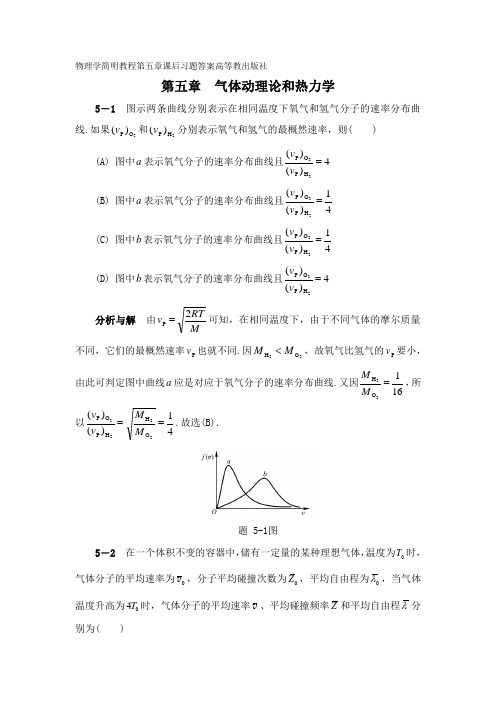
物理学简明教程第五章课后习题答案高等教出版社第五章 气体动理论和热力学5-1 图示两条曲线分别表示在相同温度下氧气和氢气分子的速率分布曲线.如果2O P )(v 和2H P )(v 分别表示氧气和氢气的最概然速率,则( )(A) 图中a 表示氧气分子的速率分布曲线且4)()(22H P O P =v v (B) 图中a 表示氧气分子的速率分布曲线且41)()(22H P O P =v v (C) 图中b 表示氧气分子的速率分布曲线且41)()(22H P O P =v v (D) 图中b 表示氧气分子的速率分布曲线且4)()(22HP O P =v v分析与解 由MRTv 2P =可知,在相同温度下,由于不同气体的摩尔质量不同,它们的最概然速率P v 也就不同.因22O H M M <,故氧气比氢气的P v 要小,由此可判定图中曲线a 应是对应于氧气分子的速率分布曲线.又因16122OH =M M ,所以=22HP O P )()(v v 4122OH =M M .故选(B).题 5-1图5-2 在一个体积不变的容器中,储有一定量的某种理想气体,温度为0T 时,气体分子的平均速率为0v ,分子平均碰撞次数为0Z ,平均自由程为0λ,当气体温度升高为04T 时,气体分子的平均速率v 、平均碰撞频率Z 和平均自由程λ分别为()(A) 004,4,4λλZ Z ===0v v (B) 0022λλ===,,Z Z 0v v (C)00422λλ===,,Z Z 0v v (D)00,2,4λλ===Z Z 0v v分析与解 理想气体分子的平均速率M RT π/8=v ,温度由0T 升至04T ,则平均速率变为0v 2;又平均碰撞频率v n d Z 2π2=,由于容器体积不变,即分子数密度n 不变,则平均碰撞频率变为0Z 2;而平均自由程nd 2π21=λ,n 不变,则λ也不变.因此正确答案为(B).5 -3 处于平衡状态的一瓶氦气和一瓶氮气的分子数密度相同,分子的平均平动动能也相同,则它们( )(A) 温度,压强均不相同 (B) 温度相同,但氦气压强大于氮气的压强 (C) 温度,压强都相同 (D) 温度相同,但氦气压强小于氮气的压强 分析与解 理想气体分子的平均平动动能23k /kT =ε,仅与温度有关.因此当氦气和氮气的平均平动动能相同时,温度也相同.又由物态方程,当两者分子数密度n 相同时,它们压强也相同.故选(C).5—4 一物质系统从外界吸收一定的热量,则( )。
陈世民理论力学简明教程(第二版)课后答案

第零章 数学准备一 泰勒展开式 1 二项式的展开()()()()()m23m m-1m m-1m-2f x 1x 1mx+x x 23=+=+++!!2 一般函数的展开()()()()()()()()230000000f x f x f x f x f x x-x x-x x-x 123!''''''=++++!!特别:00x =时, ()()()()()23f 0f 0f 0f x f 0123!x x x ''''''=++++!!3 二元函数的展开(x=y=0处)()()00f f f x y f 0x+y x y ⎛⎫∂∂=++ ⎪∂∂⎝⎭,22222000221f f f x 2xy+y 2x x y y ⎛⎫∂∂∂++ ⎪ ⎪∂∂∂∂⎝⎭!评注:以上方法多用于近似处理与平衡态处的非线性问题向线>性问题的转化。
在理论力问题的简单处理中,一般只需近似到三阶以内。
二 常微分方程1 一阶非齐次常微分方程: ()()x x y+P y=Q通解:()()()P x dx P x dx y e c Q x e dx -⎛⎫⎰⎰=+ ⎪⎝⎭⎰注:()()(),P x dxP x dx Q x e dx ⎰±⎰⎰积分时不带任意常数,()x Q 可为常数。
2 一个特殊二阶微分方程2y A y B =-+ 通解:()02B y=K cos Ax+Aθ+注:0,K θ为由初始条件决定的常量 3 ,4 二阶非齐次常微分方程 ()x y ay by f ++=通解:*y y y =+;y 为对应齐次方程的特解,*y 为非齐次方程的一个特解。
非齐次方程的一个特解 (1) 对应齐次方程0y ay by ++=设x y e λ=得特征方程2a b 0λλ++=。
解出特解为1λ,2λ。
*若12R λλ≠∈则1x 1y e λ=,2x 2y e λ=;12x x 12y c e c e λλ=+*若12R λλ=∈则1x 1y e λ=,1x 2y xe λ=; 1x 12y e (c xc )λ=+*若12i λαβ=±则x 1y e cos x αβ=,x 2y e sin x αβ=;x 12y e (c cos x c sin x)αββ=+(2) "(3) 若()2000x f a x b x c =++为二次多项式*b 0≠时,可设*2y Ax Bx C =++ *b 0≠时,可设*32y Ax Bx Cx D =+++注:以上1c ,2c ,A,B,C,D 均为常数,由初始条件决定。
简明大学物理第二版 3 刚体力学基础1
力的时间累积效应:
冲量、动量、动量定理.
力矩的时间累积效应:
冲量矩、角动量、角动量定理.
第三章 刚体力学基础
24
简明大学 物理
第二版
3-4 角动量
角动量守恒定律
一
角动量
z
1. 质点的角动量 质点相对于原点的角动量
L
y
O
L r p r mv
大小:L rm v sin 方向:符合右手法则 SI单位:kg m s
3-1 刚体的基本运动形式
补例1 在高速旋转圆柱形转子可绕垂直 其横截面通过中心的轴转动.开始时,它的 角速度 ω 0 0 ,经300 s 后,其转速达到 18 000 r· -1 .转子的角加速度与时间成正 min 比.问在这段时间内,转子转过多少转?
第三章 刚体力学基础
5
简明大学 物理
第二版
简明大学 物理
第二版
3-1 刚体的基本运动形式
刚体:在外力作用下,形状和大小都不 发生变化的物体.(任意两质点间距离保持 不变的特殊质点组.) ⑴ 说明: 刚体是理想模型 ⑵ 刚体模型是为简化问题引进的.
刚体的运动形式:平动、转动.
第三章 刚体力学基础
1
简明大学 物理
第二版
3-1 刚体的基本运动形式
22
第三章 刚体力学基础
简明大学 物理
第二版
3-3 刚体绕定轴转动的动能定理
例3-4 一质量为 m、长为 L 的均匀细杆可绕 固定光滑水平轴在铅直平面内自由转动,设 最初杆位于水平位置,求当其下转到 θ 角时 的角加速度 β 和角速度 ω。
第三章 刚体力学基础
简明大学 物理
第二版
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五张 刚体力学平动中见彼此,转动中见分高低.运动美会让你感受到创造的乐趣.走过这遭,也许会有曾经沧海难为水的感叹.别忘了,坐标变换将为你迷津救渡,同时亦会略显身手.【要点分析与总结】1 刚体的运动(1)刚体内的任一点的速度、加速度(A 为基点)A r υυω'=+⨯()()A d r a a r dtωωω'⨯'=++⨯⨯(2)刚体内的瞬心S :()21s A A r r ωυω=+⨯〈析〉ω为基点转动的矢量和,12ωωω=++A r r r '=+dr dt υ=*A A A dr dr d r r r dt dt dtυωυω''''=+=++⨯=+⨯()A d r d d a dt dt dtωυυ'⨯==++()r ωω'⨯⨯值得注意的是:有转动时r ' 与r ω'⨯ 的微分,引入了r ω'⨯与()r ωω'⨯⨯项。
2 刚体的动量,角动量,动能(1)动量:c P m υ=(2)角动量: x x xxxy xz i i i y yxyy yz y zx zyzz z z L J J J L r m L J J J J J J J L ωυωωω⎛⎫⎛⎫⎛⎫-- ⎪ ⎪⎪=⨯===-- ⎪ ⎪ ⎪ ⎪ ⎪⎪--⎝⎭⎝⎭⎝⎭∑式中:转动惯量()()()222222xx yy zz J y z dmJ z x dm J x y dm ⎧=+⎪⎪=+⎨⎪=+⎪⎩⎰⎰⎰惯量积xx yy zz J xydm J yzdm J zxdm ⎧=⎪⎪=⎨⎪=⎪⎩⎰⎰⎰且c c c L r mL υ'=⨯+* l e方向(以l 为轴)的转动惯量:(),,l l J e J e J ααβγβγ⎛⎫ ⎪== ⎪ ⎪⎝⎭222222xx yy zz yz zx xy J J J J J J αβγβγγααβ=++---(,,αβγ分别为l e与,,x y z 轴夹角的余弦) * 惯量主轴惯量主轴可以是对称轴或对称面的法线若X 轴为惯量主轴,则含X 的惯量积为0,即: 0==xy xz J J若,,x y z 轴均为惯量主轴,则:xx yy zz L J i J j J k =++〈析〉建立的坐标轴轴应尽可能的是惯量主轴,这样会降低解题繁度。
(3) 动能:22211112222c i i c c iT m m m J υυυωω'=+=+∑* 定轴转动时: 212T J ω=* 平面平行运动: 221122c c T m J υω=+3刚体的动力学方程与质点动力学方程相同。
〈析〉求角动量L时,须注意:L J ω=x y z J ωωω⎛⎫ ⎪= ⎪ ⎪⎝⎭()()()xx x xy y xz z yx x yy y yz z zx x zy y zz z J J J iJ J J j J J J kωωωωωωωωω=--+-+-+--+4 刚体的定轴转动:ω =z e ω =ϕz eL J ω= =zx J -ωi yz J -ωj zz J +ωk212T J ω=质心定理: ()22e c d r m F dt =角动量定理:()e dLM dt=〈析〉须注意外力与外力矩包括轴对物体作用 5 刚体的平面平行运动 212c T m υ=+212J ω m c d F dt υ=z dLdt=J ϕ =z M 6 刚体的定点运动(1) 基本方程(以惯量主轴为坐标轴)L J ω==x L i +y L j +z L kdL dt =d Ldt* +Ω⨯ L =x L i +y L j+z L k +Ω⨯ L =M质心定理: 22c d r m dt=c mr =F 机械能守恒:12()222xx x yy y zz z J J J ωωω++V +E = 〈析〉 Ω为活动坐标系绕固定坐标系的转速则有:di i dt=Ω⨯如:()x x d L i dL dt dt=x x dL dii L dt dt=+x x L i L i =+Ω⨯ x x L i L =+Ω⨯(2)欧拉方程(活动坐标系随刚体自旋)dL dt =d Ldt*+L Ω⨯ =M 写成分量形式:()()()x x y z y z x y y z x z x y z z x y x y z J J J M J J J M J J J M ⎧Ω--ΩΩ=⎪⎪Ω--ΩΩ=⎨⎪Ω--ΩΩ=⎪⎩ 〈析〉0M =时,z zJ Ω 0=可导出 z const εΩ==可以解释地球的纬度变迁。
(3)对称重陀螺的定点运动(活动坐标系不随刚体自旋) 三个角速度:自旋: k ψ进动: e ζϕ章动: i θ总角速度:i e k ζωθϕψ=++()sin cos i j k θϕθϕθψ=+++即 sin cos x y z ωθωϕθωϕθψ⎧=⎪=⎨⎪=+⎩ 由于对称;x J =y J =J *代入 dL dt =d Ldt* +L Ω⨯=M =()lk mge ζ⨯-sin mgl i θ=可得:cos sin sin cos 00x x x y z z y x x z z z z J J J mgl J J J J ωωϕθωϕθθωωϕθωθω*-+=⎧⎪+-=⎨⎪=⎩ 代入: ()sin cos i j k ωθϕθϕθψ=+++可整理出;cos ϕθψ+ ε=()2222sin cos 22z J Jmgl E θϕθεθ*+++= 22sin cos z J J S ϕθεθ*+= ()2222cos cos 22sin 2z zs J J J E mgl J εθθεθθ**⎡⎤-=+++⎢⎥⎢⎥⎣⎦ ()22J U θθ*=+〈析〉可以用势函数()U θ来判断进动的规则性,如:规则进动时,()()220,0dU d U d d θθθθ=>另外,也可用S 来判断,(其实更简单)。
规则进动时:0ϕ> [解题演示]1. 一长为l 的棒AB ,靠在半径为r 的半圆形柱面上,如图所示。
今A 点以恒定速度0υ 沿水平线运动。
试求:(1)B 点的速度B υ;(2)画出棒的瞬时转动中心的位置.解:如右图所示建立坐标系xoy ,依图知:02cos ()sin sin A d r r r i i i dt θθυθθ=== 得: 2sin cos r υθθθ=B A BA k r υυθ=+⨯2003200sin (cos sin )cos sin sin (1)cos i k l i l j r l l i jr rυθυθθθθθυυθ=+⨯-+=-- 瞬心S 满足: 21()S A A r r ωυω=+⨯0221()sin cos sin sin r i k i r r i j θυθθθθθ=+⨯=+如上图所示.2. 一轮的半径为r ,竖直放置于水平面上作无滑动地滚动,轮心以恒定速度0υ前进。
求轮缘上任一点(该点处的轮辐与水平线成θ角)的速度和加速度。
解:如右图所示建立坐标系xoy , 则:0,()()C A C i k rj υυυυθ==+-⨯-得:0rυθ=故:()(cos sin )B C k r i r j υυθθθ=+-⨯+00(1sin )cos i j υθυθ=+-()B C BC BCa a r r ωωω=+⨯+⨯⨯2000()[()(cos sin )](cos sin )k k r i r j i j rθθθθυθθ=++-⨯-⨯+=-+3. 半径为r 的圆柱夹在两块相互平等的平板A 和B 之间,两板分别以速度1υ和2υ反向运动,见图。
若圆柱和两板间无相对滑动,求(1)圆柱瞬心位置;(2)圆柱与板的接触点M 的加速度。
解:如右图所示建立坐标系xoy ,设瞬心在S 点。
2212(2)M N MN r i k rj r i i υυωυωυωυ=+⨯=-+⨯=-+=得:12()2rυυω+=-(1)1211212122()1()()S M r r r r rj j j υυυωυωυυυυ-=+⨯=+-=++(2)1121122()()()2M S MS MS r a a r r k k j j rυυυυωωωωωυυ+=+⨯+⨯⨯=⨯⨯=-+ 4. 高为h ,顶角为2α的圆锥,在一平面上无滑动的滚动。
已知圆锥轴线以恒定角速度Ω绕过顶点的铅直顽固不化转动。
求(1)圆锥的角速度;(2)锥体底面上最高点的速度;(3)圆锥的角加速度。
解:如右图所示建立坐标系oxyz ,并取定OABC 点。
(1)(cos sin )A O k h j h k υυαα=+Ω⨯+0cos sin 0sin B h ij h k h iαυωαωα=-Ω=+⨯=+得:cot j ωα=-Ω(2)sin 2(cos 2cos )cos cos BC h h r k h j ααααα=+-2sin tan sin h k h j ααα=-则:A B BA r υυω=+⨯0(cot )(2sin tan sin )2cos j h k h j h iααααα=+-Ω⨯-=-Ω(3)2cot cot ()cot d dj k j i dt dtωααα=-Ω=-ΩΩ⨯=Ω5. 在一半径为R 的球队体上置一半径为r 的较小的球,它们的连心线OO '与竖直轴间保持α角,如图。
若OO '绕竖直轴以恒定的角速度ω转动,小球在大球上无滑动地滚动。
分别求出小球最高点A 和最低点B 的速度.解:如右图所示建立坐标系o xyz ',则有:(sin cos )i k ωωαα=-+设O '球的转动速度为:i ωω'=则有:()(sin )O C rk rk υυωωωωα''=++⨯=--又有:(sin cos )()O O i k R r k υυωαα'=+-+⨯+(sin )R r j ωα=+得:sin R i r ωαω'=-则:(sin cos )A O r i r k υυωαα''=+⨯-+()sin sin cos sin [(1cos )]R r j R jR r jωαωααωαα=++=++(sin cos )B O r i r k υυωαα''=+⨯-()sin sin cos sin [(1cos )]R r j R jR r jωαωααωαα=+-=-+6. 一边长为d ,质量为m 的匀质立方体,分别求出该立方体对过顶点的棱边,面对角线和体对角线的转动惯量,p f J J 和b J . 解:如右图所示,取三条对称轴建立坐标系oxyz .依对称性知:42222222233222()()126d d d d d d x y z m m d md J J J x y dxdy d y dy d d ---===+=+=⎰⎰⎰ 再依平行轴定理:221223p x J J md md =+=22211152241211113336f x y b x y z x J J J md md J J J J J md =++==++==7. 一匀质等边三角形的薄板,边长为l 。