基于单目视觉的高精度三维场景重建技术研究
《2024年单目多视角三维重建算法设计与实现》范文

《单目多视角三维重建算法设计与实现》篇一一、引言随着计算机视觉技术的不断发展,三维重建技术在众多领域中得到了广泛应用,如无人驾驶、虚拟现实、三维测量等。
其中,单目多视角三维重建算法是一种重要技术,通过对同一物体在不同角度的图像进行融合与分析,以获得更准确的深度信息,最终实现物体的三维重建。
本文旨在详细阐述单目多视角三维重建算法的设计与实现过程。
二、相关背景及研究现状近年来,随着计算机视觉技术的发展,三维重建技术在学术界和工业界都得到了广泛关注。
单目多视角三维重建算法作为其中的一种重要技术,其核心思想是利用多个不同角度的图像来恢复物体的三维结构信息。
目前,该领域的研究主要集中在算法的优化和实时性上,以提高重建的准确性和效率。
三、算法设计(一)图像获取单目多视角三维重建算法的第一步是获取同一物体的不同角度图像。
这可以通过多种方式实现,如利用相机阵列拍摄多个角度的图像,或使用单个相机在不同位置拍摄不同角度的图像。
(二)特征提取与匹配获取到不同角度的图像后,需要提取并匹配图像中的特征点。
这一步主要依赖于特征提取算法和特征匹配算法。
常用的特征提取算法包括SIFT、SURF等,而特征匹配则可以使用最近邻匹配等方法。
(三)深度估计与三维重建在完成特征提取与匹配后,需要利用这些信息来估计物体在不同角度的深度信息。
这一步通常采用立体视觉或运动恢复结构(SFM)等方法。
最后,根据深度信息和相机参数,利用三角测量法等原理进行三维重建。
四、算法实现(一)软件环境算法的实现需要一定的软件环境支持。
常用的编程语言包括C++、Python等,而计算机视觉库如OpenCV、PCL等则提供了丰富的函数和工具,有助于加速算法的实现。
(二)具体实现步骤1. 读取并预处理图像数据;2. 提取并匹配图像中的特征点;3. 根据特征匹配结果估计物体在不同角度的深度信息;4. 利用三角测量法等原理进行三维重建;5. 对重建结果进行优化和可视化处理。
《单目多视角三维重建算法设计与实现》范文
《单目多视角三维重建算法设计与实现》篇一一、引言随着计算机视觉技术的飞速发展,三维重建技术在众多领域中得到了广泛应用。
单目多视角三维重建技术作为其中的重要分支,通过从多个不同角度获取的二维图像来恢复出物体的三维结构信息,具有重要研究价值和应用前景。
本文将详细介绍单目多视角三维重建算法的设计与实现过程。
二、相关技术背景在三维重建领域,根据使用的技术不同,可分为立体视觉、结构光、TOF等方法。
而单目多视角三维重建技术则主要依赖于计算机视觉和图像处理技术。
该技术通过捕捉同一场景在不同视角下的图像信息,利用多视图几何、立体匹配等算法恢复出物体的三维结构。
三、算法设计1. 图像预处理在进行三维重建之前,需要对获取的图像进行预处理。
预处理包括去噪、校正畸变、归一化等操作,以提高后续处理的准确性和效率。
2. 特征提取与匹配特征提取与匹配是单目多视角三维重建的关键步骤。
通过提取图像中的特征点,并利用特征描述子进行特征匹配,建立不同图像间的对应关系。
常用的特征提取与匹配方法包括SIFT、SURF、ORB等算法。
3. 三维点云生成根据特征匹配结果,利用多视图几何原理和三角测量法,可以恢复出场景中物体的三维点云数据。
这一步骤是单目多视角三维重建的核心部分。
4. 三维模型构建与优化通过点云数据,可以构建出物体的初步三维模型。
为了进一步提高模型的精度和完整性,需要对模型进行优化处理,包括表面重建、平滑处理等操作。
四、算法实现1. 实现环境与工具本算法的实现采用了Python编程语言,并借助OpenCV、PCL(Point Cloud Library)等开源库进行开发。
这些工具为算法的实现提供了良好的环境和支持。
2. 具体实现步骤(1)图像预处理:使用OpenCV库对图像进行去噪、校正畸变和归一化等操作。
(2)特征提取与匹配:利用SIFT、SURF等算法提取图像中的特征点,并采用特征描述子进行特征匹配。
(3)三维点云生成:根据特征匹配结果,利用多视图几何原理和三角测量法恢复出三维点云数据。
单相机三维视觉成像技术研究进展

随着科技的不断进步和应用场景的不断扩大,三维视觉成像技术的研究也变得越来越重要。
单相机三维视觉成像技术是一种基于单一相机图像信息的立体视觉成像技术,具有成本低、安装简便、适用于不同尺度和场景、重建精度高等优点。
本文将从单相机三维视觉成像技术的概念、特点、优点等方面进行详细阐述,并对其研究进展进行概述。
一、概念单相机三维视觉成像技术,顾名思义,是通过单个摄像机获取物体的二维图像,并将其转化为三维视图。
在三维视觉成像的过程中,主要考虑到光影、颜色、形状等因素,通过计算实现对目标物体的三维重建。
这一技术已广泛应用于自动驾驶、机器人视觉导航、虚拟现实等领域。
二、特点1. 成本低廉:相比于其他三维视觉成像技术,单相机三维视觉成像技术成本相对较低,易于普及和推广。
2. 安装便捷:不需要进行多个相机的安装和调试,只需要一个摄像头即可,大大减少安装和维护成本。
3. 适用于不同尺度和场景:无论是室内、室外、近距离、远距离都可以适用,能够适应不同环境下的数据需求。
4. 重建精度高:功能强大的算法可以实现对目标物体的高精度重建,达到实时监控和数据识别的目的。
三、优点1. 可以实时获取数据:传统的三维成像技术需要几秒钟至几分钟不等的时间来实现数据获取,而单相机三维视觉成像技术可以实时获取目标物体的三维数据。
2. 可以实现远程控制:利用单相机三维视觉成像技术,可以通过网络进行远程控制,获取目标物体的数据和信息,实现实时监控和操作。
3. 可以实现多种功能:通过利用单相机三维视觉成像技术,可以实现多种功能,如人脸识别、虚拟现实、机器视觉导航等。
四、研究进展近年来,单相机三维视觉成像技术在自动驾驶、机器视觉、虚拟现实等领域得到了广泛的应用。
相应地,也有很多研究者对其进行了深入的研究和探索,旨在提高其重建精度和应用范围。
以下是其中的一些研究进展:1. 针对研究者对单相机3D 重建的需求和后期操作的需要,基于深度学习和场景几何基础进行研究,提出了基于单张RGB 图像的高精度3D 重建方法。
单目视觉的同时三维场景构建和定位算法解析

单目视觉的同时三维场景构建和定位算法解析
1、简介
单目视觉三维场景构建和定位算法,是一种利用单个相机探测和重建环境的三维场景构建和定位技术。
这种技术利用单个相机经过加工处理,可以在特定的环境条件下重建三维环境场景,并支持定位和导航。
通过精确的跟踪追踪,在自动驾驶场景中确定自身在三维空间中的位置和行进路径,支持实时路径规划,实现自动驾驶车辆的安全行驶。
2、单目视觉三维场景构建和定位算法的原理
单目视觉三维场景构建和定位技术的核心原理是利用相机中自然界中反射光线的空间变化特点,解析其产生的运动特征。
由于物体的位置是一个静态的,但在一定的视角下,会产生光线的变化。
这种变化可以被视觉系统捕捉到,然后解析出相机本身的动态路线。
在这种情况下,相机就可以利用这种变化来重建出属于自身的三维场景,从而实现精确的定位和导航。
一般而言,重建三维场景和实现定位功能的最核心的算法是三维重建和特征检测算法。
三维重建算法主要是利用图像中反射光线的空间分布特点,经深度学习将其映射成三维物体的模型,从而实现三维场景的重建。
单目视觉的同时三维场景构建和定位算法解析
单目视觉的同时三维场景构建和定位算法解析单目视觉是一种只使用单个摄像机进行视觉感知和处理的方法。
在单目视觉中,构建和定位三维场景是一个重要的任务,即通过对单个图像进行分析和处理,推测出场景中的物体结构和位置信息。
传统的单目视觉场景构建和定位算法主要基于几何和几何约束。
这些算法通常包括以下步骤:1.特征提取:从图像中提取出一些具有独特性质的局部特征点,如角点、SIFT特征等。
这些特征点可以在不同图像之间进行匹配,从而推测出相机的运动以及物体的三维位置。
2.特征匹配:将特征点进行匹配,通常使用如RANSAC等算法来剔除错误的匹配,得到可靠的特征点对。
3.姿态估计:基于特征点对的几何约束,推测出相机的姿态,即相机的旋转矩阵和平移向量。
这可以通过求解一个最小化重投影误差的优化问题来实现。
4.三维重建:根据相机姿态和匹配的特征点,利用三角测量或非线性优化方法推测物体的三维位置。
通过多个图像的特征点三角化,可以获得对应物体的三维点云模型。
5.场景定位:通过比对三维点云模型和已知的场景模型,可以估计相机在场景中的位置。
这可以使用场景匹配、模型对齐、滤波等方法来达到。
然而,这种传统的单目视觉场景构建和定位算法存在一些问题。
首先,由于只有一个相机,无法直接获得物体的尺度信息。
其次,受限于图像信息的有限性,算法对特征点的提取和匹配具有一定的局限性,往往只能在有纹理的区域有效。
最后,由于只有一个视角,算法对于遮挡和对视点的限制较为敏感。
为了解决这些问题,近年来出现了许多基于深度学习的单目视觉场景构建和定位方法。
这些方法利用深度卷积神经网络(CNN)从单个图像中直接预测深度图或点云数据。
同时,一些方法还可以预测相机的姿态和场景中物体的位置。
这些方法利用大量的标注数据进行训练,可以更好地利用图像信息,提高场景构建和定位的精度和鲁棒性。
综上所述,单目视觉的场景构建和定位算法是一个复杂的问题,传统方法主要基于几何约束,而近年来的深度学习方法则通过直接从图像中预测深度和位置信息来提高性能。
单目立体相机三维重建算法研究
单目立体相机三维重建算法研究随着科技的不断进步,计算机视觉技术也得到了飞速发展。
其中,三维重建技术是计算机视觉领域中的一个热门主题。
单目立体相机是一种常用的三维重建设备,它能够对物体进行拍摄,并利用计算机视觉技术将物体的三维信息重建出来。
本文将从单目立体相机三维重建算法的原理、方法、应用等方面进行探讨。
一、算法原理单目立体相机三维重建算法主要是依靠对图像的特征点进行匹配,通过对特征点在图像中的位置差异,确定物体实际三维坐标位置和深度信息。
算法的原理是将相机拍摄到的图像分解成三个部分:图像的内参、图像的外参和特征点位置。
其中,图像的内参指的是相机的参数信息,如焦距、畸变等;图像的外参指的是拍摄图像的相机在实际空间中的位置和方向;特征点是指图像中被选定用于匹配的关键点,如角点、边缘等。
通过解算这三个部分的参数,就能够得到一个物体的三维信息。
二、算法方法单目立体相机三维重建算法的主要实现方法包括三种:立体三角测量法、基于双目形态的三维重建法和结构光三维重建法。
其中,立体三角测量法是最常用的方法之一。
该方法依靠对特征点的匹配,通过计算两个相机的视线与特征点间的位置关系,可构成一个三角形,从而得到特征点的三维坐标。
基于双目形态的三维重建法则需要配备两个相机来进行三维重建,该方法依靠不同角度下的拍摄图像得到横向视差和纵向视差的信息,再通过三角化计算得到物体的三维信息。
结构光三维重建法则需要借助激光扫描、三角测量等技术,通过对物体进行扫描和建模,构建出物体的三维模型。
三、算法应用单目立体相机三维重建技术有着广泛的应用领域。
在机器视觉领域中,该技术被广泛用于机器人视觉导航、自动驾驶车辆、工业三维重建等领域;在文化艺术领域中,利用该技术可以对文物、古建筑等进行三维扫描和保护工作;在医疗行业中,该技术可用于人体器官三维模型的重建和医学影像的处理。
可以预见,随着技术的不断发展和应用场景的不断拓展,单目立体相机三维重建技术的应用领域也将不断扩展。
《单目多视角三维重建算法设计与实现》范文
《单目多视角三维重建算法设计与实现》篇一一、引言随着计算机视觉技术的不断发展,三维重建技术在许多领域得到了广泛的应用,如无人驾驶、虚拟现实、医疗影像等。
单目多视角三维重建技术是其中一种重要的技术手段,其通过对多个视角下的图像进行重建,获得高精度的三维模型。
本文将介绍单目多视角三维重建算法的设计与实现,以期为相关领域的研究提供一定的参考。
二、算法设计1. 算法概述单目多视角三维重建算法是一种基于计算机视觉的算法,其基本思想是通过多个视角下的图像信息,结合几何变换和立体匹配等技术,实现三维模型的重建。
该算法主要包括图像预处理、特征提取、立体匹配、三维重建等步骤。
2. 图像预处理图像预处理是三维重建的前提,其主要目的是消除图像中的噪声、畸变等干扰因素,提高图像的质量。
预处理过程包括去噪、校正畸变、归一化等步骤。
其中,去噪可以通过滤波、阈值处理等方法实现;校正畸变则需要利用相机内参和畸变系数进行校正;归一化则是将图像的尺寸、亮度等参数调整到统一的标准。
3. 特征提取特征提取是三维重建的关键步骤之一,其主要目的是从图像中提取出有用的信息,如角点、边缘等。
常用的特征提取方法包括SIFT、SURF、ORB等。
在单目多视角三维重建中,需要提取多个视角下图像中的相同特征,以便进行立体匹配。
4. 立体匹配立体匹配是三维重建的核心步骤,其主要目的是根据提取的特征,在不同视角的图像之间建立对应关系。
立体匹配的精度直接影响到三维重建的精度。
常用的立体匹配方法包括基于区域的方法、基于特征的方法等。
在单目多视角三维重建中,需要采用高效的立体匹配算法,如基于视差空间的立体匹配算法等。
5. 三维重建三维重建是根据立体匹配的结果,通过几何变换和三角测量等技术,将二维图像信息转换为三维模型的过程。
在单目多视角三维重建中,需要根据多个视角下的图像信息和立体匹配结果,利用三角测量的原理计算每个像素点的深度信息,进而得到三维模型的几何形状。
一种基于单目相机的三维目标定位方法及系统与流程
一种基于单目相机的三维目标定位方法及系统与流程现代计算机视觉技术的快速发展为实现三维目标定位提供了更多可能。
本文介绍了一种基于单目相机的三维目标定位方法及系统与流程,该方法可以精确测量物体的位置和姿态。
下面将详细介绍该方法的原理及工作流程。
首先,该系统使用一台单目相机作为输入设备。
单目相机是最常见和易获得的成像设备之一,其能够通过图像采集和处理获得场景的二维投影信息。
为了实现三维目标定位,需要进行相机标定。
相机标定是确定相机内外参数的过程,确保图像准确地映射到真实世界坐标。
标定过程会采用特殊的标定板进行,通过不同视角下的标定板图像可以计算出相机的内外参数,如焦距、畸变参数、旋转和平移矩阵等。
接下来,系统通过单目相机采集现实世界中的目标图像。
目标图像中的目标物体通过边缘检测、特征点提取等算法进行特征描述。
常用的算法包括SIFT、SURF 等。
这些特征描述子可以在不同的图像中进行匹配和跟踪。
然后,系统使用已标定的相机参数以及带有特征描述子的目标图像进行目标匹配。
通过将目标图像与实时摄像帧中的图像进行特征匹配,可以确定目标在图像中的位置和姿态。
最后,系统利用三维几何学原理将图像中的目标位置映射到真实世界坐标系中。
通过已知的相机参数以及匹配到的图像特征,可以计算出目标在真实世界坐标系中的位置和姿态。
综上所述,基于单目相机的三维目标定位方法及系统与流程主要包括相机标定、目标图像采集、特征匹配以及三维坐标映射。
这种方法可以在不需要复杂设备和成本的情况下实现对目标物体的精确定位,广泛应用于机器人导航、增强现实等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Keywords
Cumulative Diagram, Monocular Vision, Parallax Figure, 3D Scene Reconstruction, NCC Algorithm, Seed Pixels
基于单目视觉的高精度三维场景重建 技术研究
金家梁,朱孟飞,姚拓中*,宋加涛
High Precision 3D Scene Reconstruction Based on Monocular Vision
Jialiang Jin, Mengfei Zhu, Tuozhong Yao*, Jiatao Song
Ningbo University of Technology, Ningbo Zhejiang Received: Jul. 24 , 2018; accepted: Aug. 7 , 2018; published: Aug. 14 , 2018
关键词
累积图,单目视觉,视差图,三维场景重建,NCC匹配,种子像素
Copyright © 2018 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
Artificial Intelligence and Robotics Research 人工智能与机器人研究, 2018, 7(3), 112-121 Published Online August 2018 in Hans. /journal/airr https:///10.12677/airr.2018.73013
3. 场景高精度三维模型重建算法
3.1. 算法概述
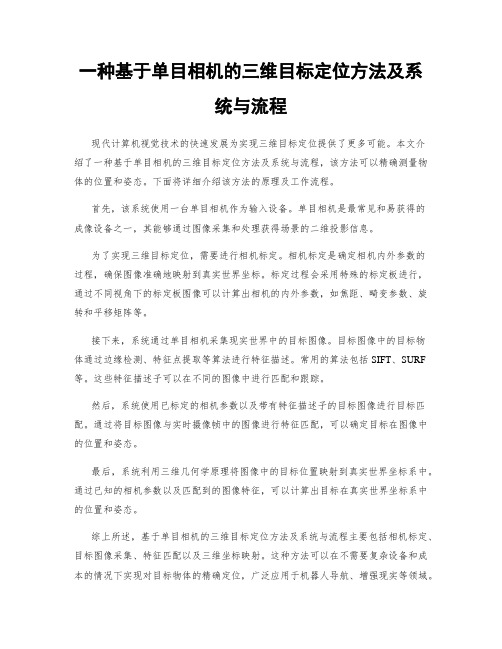
首先,获取同一个目标的两张图片。然后,计算两幅图对应的特征点,利用这些特征点计算获取两 幅图像位置关系。接着,利用位置关系通过图像校正使得极线和扫描线的位置一致。最后,用一种基于 种子像素点扩张技术的立体匹配算法:随机选择任意一个像素点,视为初始种子像素,运用初始种子像 素通过计算可获得两幅视差图,再从两幅视差图中各自选取两个尺寸相同的窗口,通过比较两个窗口内 相同位置的像素值就可以获得高置信度的种子像素,我们对这个高置信度的种子像素进行扩张,可以大 大降低视差错误区域出现的可能性。 同时提出一种基于累积图的快速 NCC 匹配代价计算方法从而高效地 获得两幅图像对应的视差图,这样我们能得到快速准确的视差图。最后利用视差图和摄像机参数信息就 可以得到目标场景的高精度三维模型重建结果。算法流程见图 1。
3.4. 图像间相对位置计算
通过计算图像对对应的 SIFT 特征点得到一个齐次坐标集合,结合摄像机内参数 K,通过 8 点算法以 及 RANSAC 技术[14]可得到本质矩阵 E。最终利用矩阵 E 可以获得旋转矩阵 R 和平移矢量 T。 上述方法计算旋转和平移运动基于对代数误差的最小化,虽然速度较快但是缺乏几何意义。因此估 计得到的运动参数精度不高,影响下一步的图像校正过程。所以需要对运动参数进行优化,这里可以采 取非线性优化算法。本章使用的非线性优化算法基于极线约束关系,也就是说通过最小化 SIFT 特征点到 其所在的极线的距离来获得优化的运动参数。
金家梁 等
摘
要
近年来,随着计算机硬件的不断快速更新,计算机的处理能力也不断变强。同时场景三维模型的获取技 术越来越成熟,我们获得场景的三维模型数据的方式更多也更加方便了。而目前在基于单目和双目的三 维重建技术中,单目技术较双目操作简单、而且取材方面更有利于推向市场。本文主要讲述基于单相机 的三维重建,然后通过基于累积图的快速NCC匹配的种子扩张算法来进行高精度的三维场景重建。本章 对经典的NCC相似度量函数进行优化,以此减少计算时间。而种子像素扩张算法即先选择初始的种子像 素,利用视差图进行窗口比较从而获得高置信度的种子像素,因此大大降低了视差图的误匹配点。试验 表明,该方法能够得到高质量的三维场景模型。
DOI: 10.12677/airr.2018.73013 113 人工智能与机器人研究
金家梁 等
双目立体视觉的实时三维重建方法,从而获得致密的三维重建结果,但是立体视觉系统结构比较复杂。 中国科学院自动化研究所机器视觉课题组致力于视觉重建的发展和研究,他们利用多视角的高分辨率的 建筑物图像就可以自动获取建筑物三维模型[10], 并将该技术应用在建筑保护方面。 微软研究院(Microsoft Research)在 2013 年推出了 Kinect Fusion 项目[11],Kinect Fusion 利用 Kinect 传感器(深度相机)可以直接 得到目标场景的深度图像数据,将传感器绕着目标物体或场景移动就可以获得不同角度下的多组深度图 像数据并实时地构建场景三维模型。但是一开始传感器获取的数据会有很大的误差从而导致开头的重建 模型很不精确。 本章针对现有三维重建算法的运算时间和精度两大研究热点提出了基于累积图和种子像素提取算法 的高精度的三维重建系统。通过基于累积图快速 NCC 匹配算法来降低图像匹配的算法复杂度,从而大大 降低了运算时间。利用种子像素提取算法获得的高置信度的种子像素,有效地减少了误配点,使得重建 结果更加精准和真实。
3.5. 图像校正
每幅图像都有极线和扫浙描线,为了使这两者对齐需要进行图像校正。当图像中的某一个像素点与 对应图像中对应的像素点在同一扫描行上时,就使得图像匹配的问题得到简化,将匹配的复杂度从二维 搜索降低到一维搜索。利用已知的相机内参和图像间的位置关系,我们设置两幅图使其相互平行,最后 分别投影成新的平面图像。 图 3 显示了原图中的两幅图像进行图像校正并且进行了 SIFT 特征匹配的结果。 从匹配结果可以看出,
th th th
Abstract
In recent years, along with the rapid updating of computer hardware, the processing capability of computer is also increasing. At the same time, 3d scene reconstruction technique has become more and more mature and we can get 3d model data for scenarios more easily than ever before. Now, in the 3d reconstruction technology based on monocular and binocular, monocular technology is simpler to operate than binocular technology and more convenient to acquire materials and more favorable to the market. This paper focuses on monocular based 3D reconstruction, the algorithm is used to reconstruct the 3d scene with a fast NCC algorithm based on the cumulative diagram. This paper improves the classic NCC similarity measures to reduce the computation time. Seed pixel expansion algorithm is presented to choose the initial seed pixels, use parallax to make window comparisons to obtain high confidence seed pixels, therefore, the mismatches of the parallax figure are greatly reduced. Experiments show that the method can reconstruct precise and clear 3d scenarios.
3.2. 摄像机内参数标定
首先要获得单目摄像机的内参以及畸变系数, 然后利用平面模板方法[12]计算相机内参数矩阵和镜头 非线性畸变系数即通过摄像机标定过程计算未知的摄像机内部参数矩阵 K 和非线性畸变系数 kc1、kc2。该 方法利用了位于同一高度上的特征点通过计算可以获得摄像机内参的二个约束等式这个方法。通过拍摄 不同位置的同一块标定板即可实现。
Figure 1. Algorithm flow diagram 图 1. 算法流程框图 DOI: 10.12677/airr.2018.73013 114 人工智能与机器人研究
金家梁 等
3.3. 图像采集和特征匹配
首先用摄像机对目标区域拍摄一幅图像;然后要求摄像机向与光轴指向基本垂直的方向运动一段距 离,然后再次拍摄目标区域。两次拍摄只要求都能看到目标区域。 由于两幅图像之间视角相差较大,需要使用 SIFT 特征匹配算法[13],对两幅图片进行特征匹配。然 而一般的 SIFT 匹配比较粗糙,存在不少误配点,需要利用诸如 RANSAC 技术以减少错误点。特征匹配 原图见图 2。
2. 相关工作
自多视觉几何被提出以来,基于视觉的三维重建发展快速。Pollefeys [7]等人的三维重建系统使用自 带的单目摄像机绕着目标拍摄一系列的连续图像,通过处理这些图像来重建出三维模型,获取的图片越 多重建出效果就越真实。但是该算法比较复杂,耗时较长。Snavely [8]等人提出了一种基于无序互联网图 像序列的视觉重建方法,但是其并不能获得一个致密的三维重建结果。A Geiger [9]等人发明了一种录用日期:2018年8月7日;发布日期:2018年8月14日