INPHO软件自动空三加密流程
POS辅助下Inpho软件空三加密研究及精度分析

4 数 据 实验 及 其精 度 分析
本 次 试 验 选 用 工 程 中某 段 外控 点 比较 密 集的 地 区 , 位 于东 经l 1 7 。 1 5 ~l l 9 。 2 0 , 北 纬3 4 。1 0 ~3 4 。 5 0 , 地 势平坦 。 采 用 2 0 0 0 国家 大 地 坐标 系为 平 面 坐 标 系 , l 9 8 5 国家高程 基准为高程系统 。 所 收 集 测 区 成 果 资料 , 平 面点 为国家 四等 ( GP S 点 为C 级) 及以上 点, 高 程 点 为 国 家 四 等 及 以 上 水 准 点。 航 摄 资 料 为收 集 的DMC 2 0 0 1 数 码 相 机 拍摄 的 像 片, 焦 距f = l 2 0 mm的 镜 头 , 摄 影 比例 尺 约 1 : 2 0 0 0 0 左右, 航 向南 北 飞行 , 航 向重 叠 为6 0 %~6 5 %, 像元 尺寸 为l 2 u m, 影 像 尺 寸为 1 4 0 0 0 × 8 0 O 0 , 地 面 分 辨 率GS D
为0 . 2 4 m, 像幅 大小 为9 6×1 6 8 mm。 传统的生产模式下要求外控点足够 多 且 分布 均 匀 , 如图 所 示 。 该 实验 区内可 获 得 均 匀分布的2 0 个外控点 。 我 们 可 在 两 个 软
1 全 自动 空中三 角测 量
数 字 摄影 测量 生 产作 业 中, 空 中三 角测 量( 简 称 空 三加 密 ) 是 关 键 工 序 之一 , 影 响 着 是 航 测 产 品质 量 与 工 作 效率 。 空 三 加 密 是确 定整个测区 的定位和定姿 , 从 而 获 得 测 区 内 任 意 点 的绝 对 坐 标 , 依 据 提 供 的 定 向控 制 点 和 像片 定 向参 数 , 确 定 区域 内 所有 影 像 的外 方位 元素从 而求出该点 所对应 的物 方 空间三维 坐标 口 果 将影 像 点坐标 观 测值 与 地 面控 制 点坐标 一 道 进行区域 网平 差, 这便 是 经典的 解 析空 中三角测 量方 法 I 女 口 果将该 观测 值 与G P S / P OS 数据( 必要 时可加 入少 量 的地 面 控 制点) 一 并进 行区域网联 合平 差即 形成了 G P S / P OS 辅助空中三 角测 量。 自动空 中三角测 量 作业 过程 , 对于 模 型连 接点, 利 用 多像影 像 匹配 算 法可 高效 、 准确、 自 动 地 量 测 其影 像 坐 标 , 完 全 取 代了常 规 航 空 摄 影 测 量 中由人 工逐 点量 测 像点 坐标 的 作业 模式 。 对 于 区域 网中的地 面控 制点, 目 前还 缺乏 行之有 效 的算 法 来自 动 定位其 影 像, 只能 将 数 字摄 影 测 量工作 站 当做 光机 坐标 量测 仪 由作
空卫星遥感与航空摄影测量:三加密

二、空三加密流程及操作
建立的工程如下图所示
二、空三加密流程及操作
建立的工程如下图所示,此时需要设置扫描分辨率,选择根节 点上,在属性窗口中设置整体扫描分辨率,单位为mm
二、空三加密流程及操作
二、空三加密流程及操作 2.2、控制点文件编辑
控制点文件为外业采集,格式如下:
注意:次控 制点X、Y、 Z为数学坐 标系,注意 X与Y的顺序
二、空三加密流程及操作
3、自动转点
内定向结束后, DATMatrix 主菜单上选择操作-自动转点弹 出空三自动转点。EO信息如果没有高精度pos数据一般不建 议点上。转点完成后,如下图所示
二、空三加密流程及操作
4、交互编辑
刺入控制点后,进行平差解算,程序主菜单操作-PATB平 差,争议点窗口会显示争议点信息
二、空三加密流程及操作
二、空三加密流程及操作
平差收敛后,添加预测的控制点,选择编辑命令-刷 新预测控制点。从外围先刺入。 刺入所有控制点后再进行PATB平差,知道像方和物 方没有粗差点。
2、参数编辑
2.1、相机文件编辑
DATMatrix 主菜单上选择参数-相机文件,导入需 要加载的相机文件,点击确定即可(相机文件在相 机检校时会生成 )。导入完成后程序会自动执行内 定向,选择是执行自动内定向
二、空三加密流程及操作
2.2、控制点文件编辑
DATMatrix 主菜单上选择参数-控制点文件,弹出 控制点编辑对话框
二、空三加密流程及操作 5、导出为MapMatrix工程文件
平差满足定向精度后,需要输出空三成果,程序 主菜单导入/导出-导出为MapMatrix工程,选 择保存的路径和名称。
多视几何理论辅助的无人机低空摄影测量解析空三

多视几何理论辅助的无人机低空摄影测量解析空三于瑞鹏【摘要】针对地形起伏大、高差大的测区,Inpho软件空三加密结果不理想或者无法完成空三加密.为此文中提出利用PhotoScan软件先对影像进行匹配处理,将经过优化的外方位元素,导入Inpho软件进行空三加密,两者结合,结果发现空三精度和速度大大提高.【期刊名称】《矿山测量》【年(卷),期】2017(045)006【总页数】4页(P73-75,104)【关键词】Inpho;PhotoScan;POS;外方位元素;空三加密【作者】于瑞鹏【作者单位】山东省第一地质矿产勘查院,山东济南 250014【正文语种】中文【中图分类】TD178;P231.2在摄影测量数字化成图作业时,空三加密是重要步骤之一,其方法是利用像片上的像点坐标与一些定向的控制点,采用摄影测量的方法来计算每个影像的外方位元素,然后依据摄影测量过程的几何反转,重新构建可以量测的几何立体模型,基于此方法就可以计算与像点对应的地面上点的坐标[1-2]。
由GPS定位技术获取航摄仪的位置参数,由IMU测定其姿态参数。
在无人机飞行条件下,GPS接收机定位精度很难实现高精度定位,信号容易失锁或者发生周跳,虽然修复周跳和信号失锁的方法有很多,但其定位精度和可靠性在高速度情况下也难以保证,对定位结果造成影响[3]。
利用原始的POS数据做空三加密时,结果不理想或者失败,因此如何提高空三加密的精度和速度就成为一个非常重要的研究内容。
根据生产实践,探讨PhotoScan辅助Inpho软件做空三加密的方法和技巧。
1 数据处理系统1.1 PhotoScan优化影像外方位元素流程Agisoft PhotoScan Professional是一个按照计算机视觉自动生成3D模型的软件。
采用多视图3D重建技术,可以处理具有重叠区域的图像,并且能够采用添加外部控制点的方法来生成具有真实地理空间坐标的3D模型。
可使用该软件处理航空摄影图像或高分辨率数码相机拍摄的图像。
INPHO软件进行带状测区数码影像的POS辅助空三加密方法探讨_杨希
测区立体模型计算及平差处理: 根据设置的平差 参数进行光束法区域网平差计算;
精度检查: 主要包括模型连接点质量检查和控制 点残差检查,经过调整处理满足精度要求后,导出平差 计算和精度统计报告。
INPHO 软件空三加密流程如图 1 所示。
3 结论
图 6 模型连接点强度示意
通过模型连接点的分布和强度检查后,会发现连 接点空洞,因此需要在连接点空洞处以立体量测的方 式手动增加连接点,补足空洞,以增强测区模型的稳定 性和系统性( 如图 7 所示) 。
2. 4 POS 数据的有效引入
在进行模型连接点的自动匹配和空三平差计算
以武汉至襄阳、十堰铁路带状测区多个测段的数 码影像为依托,在 POS 信息的辅助下,采用 INPHO 软 件进行空三加密处理。通过多个航带数据的处理操 作,探讨和总结出采用 INPHO 软件对带状测区数码影 像进行 POS 辅助空三加密的四点方法和技巧:
INPHO 是由德国测绘学家 Ackermann 教授创立 和研发的数字摄影测量系统,用于空三加密处理的模 块为 MATCH - AT,该模块采用光束法区域网平差模
收稿日期: 2015-01-08 作者简介: 杨 希( 1985—) ,女,2009 年毕业于西南交通大学摄影测量 与遥感专业,硕士,工程师,E-mail: tsygkyyx@ 163. com。
运营中的轨道线路、周围的建( 构) 筑物及基础设施因 受施工影响而产生变形,严重时可能会危及线路及其
度差异和变化量,适用于多点相对沉降测量,以其精度 高、效率高、全天候,自动化性能高等优势在城市轨道
附属结构安全,影响城市轨道交通的运营。在运营线 路附近施工时,加强运营线路道床及其附属结构的监 测,保证城市轨道交通的运营安全显得十分必要。静
空三加密流程的步骤
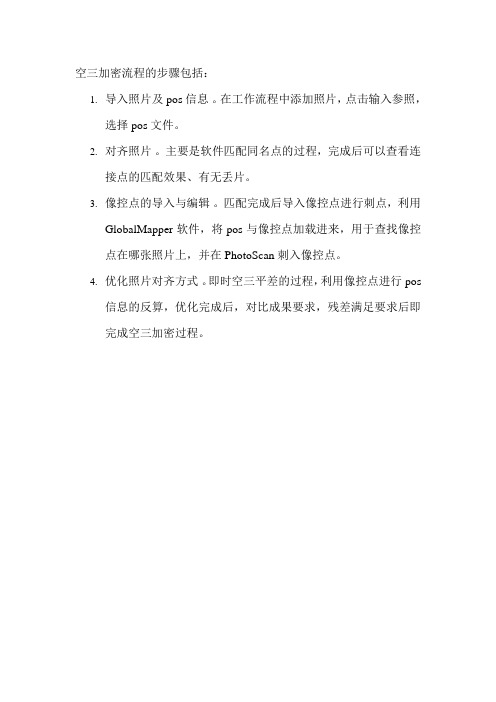
空三加密流程的步骤包括:
1.导入照片及pos信息。
在工作流程中添加照片,点击输入参照,
选择pos文件。
2.对齐照片。
主要是软件匹配同名点的过程,完成后可以查看连
接点的匹配效果、有无丢片。
3.像控点的导入与编辑。
匹配完成后导入像控点进行刺点,利用
GlobalMapper软件,将pos与像控点加载进来,用于查找像控
点在哪张照片上,并在PhotoScan刺入像控点。
4.优化照片对齐方式。
即时空三平差的过程,利用像控点进行pos
信息的反算,优化完成后,对比成果要求,残差满足要求后即
完成空三加密过程。
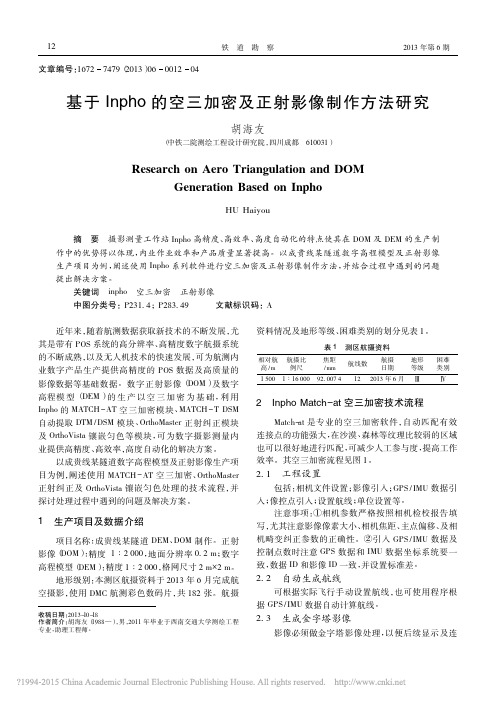
基于Inpho的空三加密及正射影像制作方法研究_胡海友
包括: 相机文件设置; 影像引入; GPS / IMU 数据引 入; 像控点引入; 设置航线; 单位设置等。
注意事项: ①相机参数严格按照相机检校报告填 写,尤其注意影像像素大小、相机焦距、主点偏移、及相 机畸变纠正参数的正确性。②引入 GPS / IMU 数据及 控制点数时注意 GPS 数据和 IMU 数据坐标系统要一 致,数据 ID 和影像 ID 一致,并设置标准差。
除使用软件整合工具之外,还可以使用 Radiometrix Editor 进行人工干预调节,以达到满意的效果。
编辑拼接线: 由于航片投影差问题,在房屋、道路 等地物处,使用自动拼接会产生如图地物接边问题,需 要在 Seam Editor 中修复( 见图 4) 。
桥梁处理: 由于 DEM( 见图 5) 没有采集桥梁,使 用该 DEM 生成的 DOM 会产生“拉花”和扭曲,解决方 案是采集特征线时采集桥梁轮廓,并整理桥梁处的等 高线,重新生成 DEM( 见图 6) 。将含有桥梁的单片重 新生成正射影像,并重新镶嵌。
( 3) 引入 GPS / IMU 数据时,注意 GPS 数据 ID 与 影像 ID 保持一致。
( 4) 可以手动生成航线,也可程序自动生成航线, 没有角元素数据可以使用程序自动计算的航偏角。
( 5) 可以将区域网划区块处理,通过小的区块可 方便检查航线设置及影像拼接是否正确。
( 6) 自动点生成过程中,使用 DTM 进行辅助,可 以提高效率和准确性。
HU Haiyou
摘 要 摄影测量工作站 Inpho 高精度、高效率、高度自动化的特点使其在 DOM 及 DEM 的生产制
作中的优势得以体现,内业作业效率和产品质量显著提高。以成贵线某隧道数字高程模型及正射影像
Inpho软件作业指导
I n p h o软件作业指导-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII前言Inpho 摄影测量系统包括空中三角测量,三维立体编排,地形建模,正射影像处理和图像获取等。
空中三角测量MATCH-AT全自动空三(支持推扫式相机ADS4)inBlock光束法区域网平差地形建模MATCH-T自动生成DSM/DTMDTMaster DTM/LiDAR点编辑正射影像处理OrthoMaster生成真正射影像OrthoVista几百幅图像一起匀色和镶嵌为了方便4D产品的生产,特编写本指导书,结合自己经验和参考手册。
许多内容通过翻译,欠妥之处,还请指正。
本书着重介绍MATCH-AT MATCH-T DTMaster OrthoMaster OrthoVista五个模块。
1.1.MATCH-AT 自动空三加密S S T T E E P P11新建工程,需要以下几个数据:数字影像相机文件外方位元素初始值外业控制资料(控制点成果和刺点片)工作内容•指定项目名称•载入近似中心(GPS、INS)•载入图像•确定单位,像素大小,照相机的名称和mount rotation,地形高度•自动设定块打开Match-AT,点击,下拉点击弹出对话窗①输入工程名和存储路径②导入航片初始坐标,即根据航摄索引图等初设概略航片坐标。
格式如下2750 388000 5000000 3000 /航片号 X坐标 Y坐标 Z坐标2749 389000 5000000 30002748 390000 5000000 3000# /航带分隔符2779 360000 4997000 30002780 361000 4997000 30002781 362000 4997000 3000#…………#如果是GPS辅助摄影,按# Strip 1759 539286.802 335214.655 1774.851 -1.8738 -0.3952 -3.4960760 539839.899 335206.408 1782.623 -1.5935 -0.3668 -3.4721761 540439.471 335192.804 1783.540 0.2288 0.8253 -3.7421# Strip 2... ... ...顺序导入,航带之间用“#”隔开。
基于Inpho的空三加密及正射影像制作方法研究
2 I n p h o Ma t c h — a t 空三 加 密 技 术 流 程
Ma t c h - a t 是 专业 的空 三 加 密 软 件 , 自动 匹 配 有 效
正射 纠正 及 O r t h o V i s t a镶 嵌匀 色处 理 的技 术 流程 , 并 探讨 处理 过程 中遇 到 的问题及解 决方 案 。
连接 点 的功能强 大 , 在 沙漠 、 森林 等纹理 比较 弱 的区域
也 可 以很 好地进 行 匹配 , 可 减少人 工参 与度 , 提高 工作
2 . 2 自动 生 成航 线
可根 据实 际飞行 手 动设 置 航 线 , 也 可 使 用程 序 根 据G P S / I MU数据 自动计 算航 线 。
2 . 3 生成 金 字 塔 影 像
影像 必须 做金 字塔 影 像 处 理 , 以便 后 续 显 示及 连
基于I n p h o的空三加密及正射影像制作方法研究 : 胡海友
注意事项 : ①相机参数严格按 照相机检校报告填 写, 尤其注意影像像素大小 、 相机焦距 、 主点偏移 、 及相 机 畸变 纠正参 数 的正 确性 。② 引 入 G P S / I MU数 据 及 控制点数时注意 G P S 数据 和 I M U数据坐标系统要一 致, 数据 I D和影像 I D一致 , 并设置标准差。
高程模型( D E M) : 精度1 : 2 0 0 0 , 格网尺寸 2 m x 2 i n 。 地形 级别 : 本测 区航摄 资料 于 2 0 1 3年 6月 完成 航
空 摄影 , 使用 D MC航 测 彩 色数 码 片 , 共 1 8 2张 。航 摄
INPHO软件自动空三加密标准流程
INPHO软件自动空三加密启动软件后建立一种新旳工程,点击菜单栏旳File,弹出窗口点击New File弹出对话窗口点击ok,浮现下面旳窗口。
根据有关旳设计文献,数据视状况开始相应旳操作1.建立相机文献双击1弹出下面旳对话窗口点击后弹出窗口填写相应旳相机名称、类型、镜头类型。
点击后,弹出窗口点击,出窗口根据相机旳检校文献,把相应旳值填写到窗口中,由于影像经过畸变差改正所在像主点旳坐标值都给定零值,点击接着点击下图中旳到此相机文献就建好了。
2.导入影像数据回到project editor界面,双击Frame Type,弹出对话框。
在对话框,选择Import旳第一种选项,如下图点击按钮,选中选择影像寄存旳工程目录文献夹点击按钮影像导入,在“”处填写飞行区域旳地面平均高度值,点击按钮进行下一步点击按钮,浮现下图旳操作点击图中旳按钮,点击下图中旳按钮3.影像就导入工程完毕了。
导入GPS导航数据导入航片初始坐标,即根据数据检查软件输出旳XYZ坐标为初设概略航片坐标。
格式如下:# /航带分隔符11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标12 x12 y12 z12#21 x21 y21 z2122 x22 y22 z22#⋯⋯⋯⋯#如果是GPS辅助照相,按photoID px py pz omega phi kappa顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处双击后弹出下图旳窗口点击上图中红色框标处,浮现下图旳对话窗口点击上图中红色框标处,浮现下图旳对话窗口选择根据数据检查软件输出旳XYZ坐标建立旳GPS导航数据后,双击图中红色框标注旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口把影像序号、坐标相应好后点击上图中旳按钮浮现下图旳对话窗口勾选相相应旳选项后点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口点击上图中旳按钮浮现下图旳对话窗口根据设计规定填入限差值。
空三加密inpho5.7操作流程
空三加密技术总结一、概述空中三角测量,即解析空中三角测量,是指通过航测内业方法(包括内定向、相对定向、公共连接点的转刺)网构建空中三角网并按严密的数学模型进行区域整体平差,解求出全区所有加密点的地面坐标及像片方位元素。
目前Inpho是主流的航空摄影测量软件,支持对大飞机数据的空三加密,同时有专门的无人机模块对无人机数据进行空三加密,对飞行姿态不稳定的无人机数据具有明显优势。
二、数据准备在实际工作中需要以下数据:1、相机检校是航测处理中必不可少的。
一般航测后处理中需要相机检校后的焦距(mm)、像元大小(um)、主点偏移(PPA或 PPS)等;2、航片数据。
影像一般以 Tif或 Tif jepg 格式保存、处理。
Jpg 格式在压缩过程中信息损失很大,自动空三加密时无法匹配出有效的连接点;3、粗略的外方位数据。
航片的粗略外方位元素,大地平面坐标系统,定位精度在10-20米以内(俯仰角和偏转角尽量控制在20度以下);4、地面控制点数据。
三、硬件配置情况联想台式机,四核3.20GHz,4GB 内存。
四、技术路线五、Inpho应用实例过程1、数据预处理(1)原始航片数据检查,包括航片框幅、分辨率与相机报告中内容的检查。
航片名称与pos中的id号一一对应。
(2)pos数据整理坐标为CGCS2000高斯克吕格投影坐标。
具体包括:id航片号、x坐标、y坐标、h高程、翻滚角、俯仰角、航飞角;以txt文件格式保存;航带间用#间隔。
(3)原始航片畸变处理,利用相机文件中的畸变参数应用Matrax软件。
像主点偏移x0、y0对应Matrax中的x0、y0,径向畸变系数为k1、k2对应Matrax中的k3、k5,像元大小,偏心畸变系数p1、p2对应Matrax中的p1、p2。
(4)控制点数据整理控制点数据位txt格式,坐标为高斯2000投影坐标,高程为85高。
2、空三过程(1)工程建立①相机编辑将相机文件中的焦距、框幅、分辨率信息输入,如果使用做过畸变的航片,则像主点偏移填0,否则填写相机文件中的信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
INPHO软件自动空三加密
启动软件后建立一个新的工程,点击菜单栏的File,弹出窗口点击New File 弹出对话窗口
点击ok,出现下面的窗口。
根据相关的设计文件,数据视情况开始相应的操作
1.建立相机文件
双击1弹出下面的对话窗口点击后弹出窗口
填写相应的相机名称、类型、镜头类型。
点击后,弹出窗口
点击,出窗口
根据相机的检校文件,把相应的值填写到窗口中,由于影像经过畸变差改正所在像主点的坐标值都给定零值,点击
接着点击下图中的
到此相机文件就建好了。
2.导入影像数据
回到project editor界面,双击Frame Type,弹出对话框。
在对话框,选择Import的第一个选项,如下图
点击按钮,选中
选择影像存放的工程目录文件夹
点击按钮
影像导入,在“”处填写飞行区域的地面平均高度值,点击按钮进行下一步
点击按钮,出现下图的操作
点击图中的按钮,点击下图中的按钮
3.影像就导入工程完成了。
导入GPS导航数据
导入航片初始坐标,即根据数据检查软件输出的XYZ坐标为初设概略航片坐标。
格式如下:
# /航带分隔符
11 x11 y11 z11 /航片号 X坐标 Y坐标 Z坐标
12 x12 y12 z12
#
21 x21 y21 z21
22 x22 y22 z22
#
⋯⋯⋯⋯
#
如果是GPS辅助摄影,按
photoID px py pz omega phi kappa
顺序导入,航带之间用“#”隔开。
接着双击下图中红线标注处
双击后弹出下图的窗口
点击上图中红色框标处,出现下图的对话窗口
点击上图中红色框标处,出现下图的对话窗口
选择根据数据检查软件输出的XYZ坐标建立的GPS导航数据后,双击图中红色框标注的按钮出现下图的对话窗口
点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口
把影像序号、坐标对应好后点击上图中的按钮出现下图的对话窗口勾选相对应的选项后点击上图中的按钮出现下图的对话窗口
点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口
点击上图中的按钮出现下图的对话窗口点击上图中的按钮出现下图的对话窗口
点击上图中的按钮出现下图的对话窗口
根据设计要求填入限差值。
配置完后点击和,再点击窗体的完成导航数据的配置。
像片控制点的导入和导航数据的导入大致是一样的。
点击上图中的保存按钮,保存工程文件。
注意:工程文件名不能有汉字字符出现下面查看影像数据的排列对应情况
双击上图中标注的地方,出下面的对话窗口
根据航摄略图调整好相片的排列顺序,点击按钮完成操作。
点击下图中的图标保存工程。
金字塔影像生成
保存完工程后在菜单项Basics/image commander,进行金字塔影像处理
如果是灰度影像可不能设置
点击对话框,开始进行金字塔,生成金字塔影像如下图:
进行相对定向可选取下图中的菜单项。
MULTI PHOTO MEASUREMENT 测量地面控制点、检查或增加连接点
STEREO PHOTO MEASUREMENT 立体测量检查3D控制点和连接点
TRIANGULATION 航空三角测量
ANALYZER 分析工具
点击按钮,可见下图的窗口
见下图箭头标注处
选中上图中的选项后,点击下图中箭头标注的按钮
见下图的详细设置1
注:无人机的导航姿态精度不是很好,可以不用IMU选项。
2
3
4
5
点击上图中的按钮,参数设置完成了。
点击上图中的按钮,开始自动连接点。
自动点连接完成后,可点 ANALYZER 分析工具,查看自动点的分布情况。
MULTI PHOTO MEASUREMENT 测量地面控制点、检查
或增加连接点。
运行后查看结果,微调整像控点的位置,使平差结果符合要求。
2.2、Match-T DTM 生成
点击下图1中箭头标注的菜单,可见下图2
图1
图2
选择图2中的,弹出以下界面:
图3
由于主要是获取DOM数据,DTM格网的间隔参数可以用10-20米的格网间隔。
点击图3中的编辑DTM参数。
在“TYPE”选中“DTM”和相对应的地形,其他的参数设置不变,最后按
中开始键进行匹配DTM。
2.3 OrthoMaster正射影处理
1、创建正射影工程
点击菜单项“Products”-“Orthomaster”-“Ortho Rectification”.
弹出对话框,进入正射影处理界面,如下:2、导入DTM数据
3、重叠度设置
点击进行重叠度设置,弹出Automatic Generation of ortho Areas对话框,如下图:
设置完后点击,其效果如下:
3、设置输出参数
单击进行输出参数设置,弹出Selection Orthophoto Generation Parameters对话框,如下图:
点击Files,进入此界面,设置输出路径,如下图:
设置完后点击确定,弹出一下对话框,点击Run开始正射影处理。
以上则是正在运行,当红色线框全部变成白色,overall运行是100%时,正理完成。
2.4 OrthoVista图像拼接处理
打开OrthoVista模块,如下:
1、添加数据
点击,使用路径添加数据,弹出对话框如下:双击路径下任意一张照片,添加数据如下:
点击,显示影像。
2、设置输入范围
选择菜单项Process下Select Area选项。
点击Select Area弹出Custom Area Definition对话框。