直流电机驱动DCmotor
bldc电机驱动原理
bldc电机驱动原理
BLDC电机(Brushless DC Motor)是一种无刷直流电机,它通过电子换相来实现转子的转动。
与传统的有刷直流电机相比,BLDC 电机具有更高的效率、更低的噪音和更长的使用寿命,因此在很多应用中得到了广泛的应用,比如电动汽车、无人机、工业自动化等领域。
BLDC电机的驱动原理主要包括电子换相和闭环控制两个方面。
电子换相是指通过控制器对电机的三相电流进行控制,从而实现电机转子的旋转。
闭环控制则是通过传感器(比如霍尔传感器)来实时监测电机的转子位置和速度,并根据监测到的信息对电机进行精确的控制。
在BLDC电机的驱动过程中,控制器会根据电机转子的位置和速度来确定合适的电流波形,并通过功率半导体器件(比如MOSFET)来控制电流的流向和大小,从而驱动电机的转动。
这种精确的电流控制可以使BLDC电机在不同负载下保持稳定的转速和扭矩输出。
此外,一些高级的BLDC电机驱动器还配备了先进的控制算法和通信接口,可以实现更精确的控制和监测。
这些功能使得BLDC电机
在各种应用中都能够发挥出色的性能,成为现代电动化系统中不可或缺的关键部件。
总的来说,BLDC电机的驱动原理基于精密的电子换相和闭环控制技术,通过控制器对电机的电流进行精确控制,从而实现高效、低噪音、长寿命的电机运行。
随着电动化技术的不断发展,BLDC电机在各种领域中的应用前景将会更加广阔。
直流无刷电机(BrushlessDCmotor)

直流无刷电机(Brushless DC motor)0 IntroductionIn the development of the smart car, an important part is that the smart car can adjust the speed and direction of the vehicle independently according to the surrounding obstacles. DC motor speed control system designed in this paper is an important part of the intelligent car, DC motor speed control system is mainly composed of S3C44B0X processor and motor drive chip L298N, the main function is the two wheel drive car, adjust the vehicle speed, by changing the two wheel speed adjustment direction.1 Hardware DesignDesigned by ARM, the ARM processor with RISC architecture has strong performance, low power consumption, small size, and supports Thumb (16 bit) /ARM (32 bit) double instruction set, and the instruction execution speed is fast. At present, ARM series microprocessor has occupied more than 75% market share in the 32 bit RISC embedded products. Especially ARM7TDMI series is the most widely used, and its cost performance is also the highest.1.1 brief introduction of S3C44B0XS3C44B0X is a 16/32 bit RISC processor based on the ARM7TDMI kernel introduced by Samsung. This processor provides a wide range of on-chip peripherals that greatly reduce configuration of components other than the processor in system circuitry. The S3C44B0X has 6 16 bit timers, each of which can operate in either an interrupt mode or a DMA mode. Timers 0, 1, 2, 3, 4 have thePWM function, and timer 5 is an internal timer. Timer 0 and 1, 2 and 3, 4 and 5 respectively, sharing a 8 bit prescaler (Prescaler), the scope of the prescaler value is 0 - 255, three prescaler value through the TCFG0 register set; the timer 0, 1, 2, 3 each have a 5 different frequency signals (1/2, 1/4, 1/8, 1/16, 1/32) clock divider (Divider), timer 4 and 5 are respectively provided with a 4 frequency signal (1/2, 1/4, 1/8, 1/16) clock divider. The segmentation values of the 6 timers are set by register TCFG1.Timer input clock frequency = MCLK/Prescaler/Divider. Among them, MCLK = 60MHz is the dominant frequency of the system.1.2 hardware implementationIn order to improve the system efficiency and reduce power consumption, the power amplifier circuit is based on the bipolar H bridge pulse width modulation (PWM) integrated circuit L298N. L298N SGS is the product of the company, including high voltage and high current driver two H bridge, receiving standard TTL logic level signal to drive a 46 volt, 2 amp motor below the working temperature range from - 25 degrees to 130 degrees. A schematic diagram of a H bridge within it is shown in figure 1. The EnA is a control enable terminal that controls the stop of the motor between the OUTl and the OUT2, and the IN1 and IN2 pins are connected to the control level to control the steering of the motor between the OUTl and the OUT2. When the enable terminal EnA is valid, the IN1 is low, the IN2 is high, the transistor 2, the 3 are connected, and the 1 and 4 are cut off, the motor reverses. When the IN1 and IN2 levels are the same, the motor stops.Another H bridge works the same as above. The motor stop between OUT3 and OUT4 is controlled by EnB, and the steering of the motor between OUT3 and OUT4 is controlled according to the input level of IN3 and IN4 pins.Since the S3C44B0X itself contains 5 PWM outputs, the direct output control signal can be applied to the L298N without additional circuitry. The schematic diagram of the system is shown in figure 2. In the system, timers 1 and 2, which work in interrupt mode, are selected as timers for generating PWM. Through programming, set the I / O port, PE4 and PE5 as the timer 1, 2 output PWM port, access to the L298N EnA and EnB port, according to the timer 1, 2 output PWM frequency control two DC motor speed. PE6 is set to output port, connected to IN1 and connected to IN2 via a reverser; similarly, PE7 is also set to output port, access to IN3, and access to IN4 via a reverse device. By accessing the reverser, the IN1 and the IN2, IN3 and IN4 will not be at the same high or low level, i.e., the motor will not stop because the IN1 and IN2, the IN3 and the IN4 levels are the same.The stop operation of the motor can be achieved by modulating the pulse width to 0, i.e., the duty cycle is 0, or the bit of the timer is turned off. Thus, only one signal PE6 can control the state of IN1 and IN2, and PE7 controls the state of IN3 and IN4, thus reducing the control signals of the system and simplifying the system to a certain extent. In order to ensure the normal work of the L298N driver chip, but also to join in with the DC motor of four diode with current in the motor back EMF generated by the shunt to ground or power, in order to avoidreverse electromotive force damage to L298N.2 software design of the system2.1 timer operation modeIn S3C44B0X, each timer has an inverted timer that drives the 16 bit countdown register TCNTn via the timer clock source. Before the timer starts, write an initial value to the timer count buffer register (TCNTBn), which is loaded into the countdown timer TCNTn when the timer is started. In the timer comparison buffer register (TCMPBn), an initial value is also written. The runtime is used to load into the comparison register TCMPn and compare with the value of the countdown timer TCNTn. When you start the system, you need to load the values of the two buffers, TCMPBn and TCNTBn, into TCMPn and TCNTn by setting the manual refresh bit. The application of these two buffers, i.e., double buffers, of TCMPBn and TCNTBn, allows the timer to produce a stable output at the same time as frequency and duty cycle. The general steps to start the timer are as follows:1) writes the initial value to TCNTBn and TCMPBn.2) set the automatic reload bit of the corresponding timer3) set the manual update bit for the corresponding timer, and the counter is set to the off state4) setting the start bit of the corresponding timer to start the timer and clearing the manual update bit at the same time.At this point, the timer TCNTn starts counting backwards. When the TCNTn has the same value as the TCMPn, the logic level of the TOUTn is changed from low to high. When the counter TCNTn reaches 0, a timer interrupt request is generated, informing the CPU that the timer operation has been completed. At this point, if the auto reload control bit enable, the value of the TCNTBn is automatically loaded into the TCNTn register and the next operation cycle is started. If the timer is stopped by clearing the timer, enabling bits, etc., the count value will not be automatically overloaded.2.2 modulation PWMPulse width modulation (Pulse Width Modulation PWM) means that the basic cycle of the output signal is fixed, and the output power is controlled by adjusting the size of the working cycle in the basic cycle. For a timer, when the frequency of the input clock source is generally unchanged, namely TCFG0 (timer prescaler value) and TCFG1 (timer segmentation value) value after setting no change. This provides a stable clock source for PWM. The speed of the motor is proportional to the voltage at both ends of the motor, and the voltage at both ends of the motor is proportional to the duty cycle of the control waveform. Therefore, the speed of the motor is proportional to the duty cycle, and the larger the duty ratio, the faster the motor is turned. In the system, the PWM pulse frequency is decided by TCNTBn, and the PWM pulse width value is decided by the value of TCMPBn, and the duty cycle is TCMPn/TCNTn. If you want to make the motor speed down, a relatively low output value of PWM pulse width is obtained, can reduce the value of TCMPBn; to makethe motor speed increase, the output of a higher PWM value, can increase the value of TCMPBn. Because of the characteristics of the double buffer, a PWM cycle TCMPBn value by ISR (interrupt service routine) or other means in the current cycle of low level PWM at any point that is written, can be blocked by re setting the value of TCMPBn to change the motor speed in the program. The value of the buffer TCMPBn and TCNTBn is not necessarily equal to the value of the TCMPn, TCNTn of this cycle, but must be the value of the next cycle of TCMPn and TCNTn.2.3 program codeThe application in this article is in ADS1.2 development environment, cross compiled, downloaded to Flash running. Program code (take timer 1 as an example):/ / initialize portVoid, Init_PortE (){RPCONE=0x5a00; / / define I/O port //PE4, PE5, PE6, PE7 / / functionRPUPE=0xf8; / / no resistance of the corresponding bit to pull}Start / / No. A motor, the motor control by timer 1Void, Start_MotorA (){RTCNTB1=Motor_CONT; / / two / / buffer assignment RTCMPB1=Motor_cont;RTCON |= (0x01<<11); / / Auto reload timer 1 RTCON |= (0x01<<9); / / manual refresh set RTCON &= ~ (0x01<<10); / / close reverserRTCON |= (0x01<<8); / / start timer 1RTCON &= ~ (0x01<<9); / / clear manual refresh bit }//A motor stopVoid, Stop_Motor1 (){RTCON &= ~ (0x01<<8); / / clear enable bit timer 1 }/ / change the duty ratio and the steering motorVoid SetPWM (int, valueA, int, drct){RPDATE=drct; / / drct definition PE6 output high level or low level, to control motorRTCMPB1=Motor_COUNT*valueA/0x64; //valueA is the duty cycle can be set to valueA for 0 A to make the motor stop / stop rotation.}Other motor settings are the same as above. The moving speed of the two groups of PWM can be changed at the same time, and the running speed of the car can be adjusted. By setting two different duty cycles, the speed difference between the two wheels is formed, and the purpose of changing the driving direction is achieved.In contrast, 1KHz 100Hz, 10KHz PWM, the output of the driving motor is found when the frequency was 100 Hz, the motor running in clearance rotational state; when the frequency is 10KHz, the motor running instability; when the frequency is 1KHz, the different duty ratio motor operation is very smooth, the speed and the direction of change quickly. Fig. 3 is a modulation waveform produced by an oscilloscope with an PWM frequency of 1KHz, a duty ratio of 30%, and an inversion of the motor.3 conclusionIn this paper, the output frequency of PWM is 1KHZ, and the DC motor is 120 revolutions per minute. The rated voltage is 12V (no additional inductive load outside the motor). The final realization of this subject is the embedded intelligent vehicle system based on ARM, and the PWM speed control of DC motor is one of the important subsystems. The experiment proves that the 16/32 bit RISC processor Samsung of S3C44B0X company is convenient to realize the modulation PWM, programmable, and the motor speed and steering change rapidly without pause, so it can serve the smart car very well.Source: 08, my loveSource of technical data: zhangwrThis article is for learning, reference, use, copyright belongs to the author.Because the content of this website is more and cannot contact the author in time, please contact us according to the method displayed on this website.Design and implementation of DC motor speed regulation system based on ARM0 Introduction in the development of the smart car, an important part is that the smart car can adjust the speed and direction of the vehicle independently according to the surrounding obstacles. The DC motor speed control system designed in thispaper is one of the smart cars...Design of Embedded Ethernet based on S3C44B0X mu cLinuxWith the rapid development of semiconductor technology, embedded products have been widely used in military, consumer electronics, network communications, industrial control and other fields. Networking is an inevitable trend of embedded system development. Embedded Linux acts as an open source...Development of embedded application based on ClinuxThe range of embedded systems is very extensive. From simple SCM systems to non computer systems operating at several hundred megabytes, operating systems can be referred to as embedded systems. With the increasing demand for electronic systems in all industries,Embedded systems are also becoming more and more...Application of Microwindows based on S3C44B0X in remote infrared meter reading systemWith the extensive application of embedded systems, the demand for embedded products for human-computer interaction is becoming larger and larger, and the design of GUI is becoming more and more important. Vendors who develop real-time embedded systems over Linux will typically choose the following GUI systems...About Samsung S3C44B0X target board uClinux BootloaderUClinux is an embedded Linux operating system designed for the control domain. It follows most of the main features of the mainstream Linux and has been reduced to a certain extent. The design is primarily aimed at microprocessors without memory management units (MMU), such as ARM7...。
直流无刷马达简介BrushlessDCMotor

感應馬達
X X △ X △ △ ○ X ○ X X 較差
直流有刷馬達
△ △ X △ △ X X △ X △
轉子慣性低
高速度運轉性能 無轉子銅損 高效率 溫升低
無整流子,無碳刷摩 擦,無火花
低速扭力 免保養 過附載能力
五、應用實例(群真科技驅動器)
4 5
F/R FSP
藍 橙
6
R/S
白
7 8
COM 5V
黑 紅
JP4 接頭 [馬達/電源接線端, 12 Pin]
腳 位 1 2 3 4 5 名 稱 線色 BL5 BL9
馬達線圈U相 電源 DC24V+ (與JP1_+24V相通) 電源 GND NONE Hall Sensor電源, H- (與JP1_GND相通)
在低速運轉下,仍具備高輸出扭矩。 效率比傳統馬達好很多。 安靜、無噪音、免保養、壽命長。 使電動車輛擁有較高的續航力。 技術層次高,進入門檻高,附加價值 高。
三、直流無刷馬達與交流馬達之比較
傳統交流馬達
耗電量/效率 (相同作功)
直流無刷馬達
50W/90%
150WБайду номын сангаас35%
噪音
體積/重量 扭力 轉速 溫升
直流馬達的結構比較
(a)無刷
(b)有刷
二、直流無刷馬達的特點
具備體機小、重量輕、輸出功率大及高輸出扭 矩等特性。 採用電子換相結構,低電磁干擾,免碳刷保養, 速度可達10,000 rpm以上。 低轉子慣性,轉子體積比傳統感應馬達及有刷 馬達小很多,有較佳的控制性能。 馬達內轉子設計,線圈位於馬達定子中,定子 直接接觸散熱片,有極佳的散熱設計。
DC风扇运转原理

DC风扇运转原理DC风扇是指使用直流电源供电的风扇,其运转原理是基于电磁感应和电机转动的原理。
DC风扇的核心部件是电机,其中的转子和定子之间通过电流产生的磁力使得电机转动,从而驱动叶片产生风力。
具体来说,DC风扇通常采用无刷直流电机(BLDC motor)或有刷直流电机(brushed DC motor)。
无刷直流电机是DC风扇中常见的类型,它由转子、定子、永磁体和电子控制电路组成。
在无刷直流电机中,定子上的线圈通过与电源交替连接,产生一个旋转的磁场。
而转子上的永磁体受到定子磁场的作用,随之旋转。
转子上的永磁体受到定子磁场的引导,永磁体产生的磁力不断与定子线圈之间的磁力相互作用,使得转子不断旋转。
转子上的旋转运动通过轴传递到风扇叶片上,驱动叶片产生气流。
有刷直流电机是另一种常见的电机类型,它由转子、定子、巴尔门刷和电子刷组成。
在有刷直流电机中,定子上的线圈通过切换巴尔门刷和电子刷的接触,产生一个旋转的磁场。
当电流通过巴尔门刷时,磁场与转子上的永磁体相互作用,使得转子旋转。
转子的旋转运动通过轴传递到风扇叶片上,驱动叶片产生气流。
无论是无刷直流电机还是有刷直流电机,其转子的旋转运动都是由与定子线圈或刷子之间的磁力相互作用产生的。
而电机的旋转是由电流的增加和减小控制的。
通过电子控制电路可以调节电机的电流大小,从而控制风扇叶片的转速和风力大小。
需要注意的是,DC风扇的运动不仅与电机的原理有关,还与风扇叶片的设计和空气动力学有关。
风扇叶片的形状和数量会影响风扇产生的气流大小和风力的强弱。
此外,DC风扇还可能配备一些调速器和传感器,以实现风速的调节和温度的监测等功能。
总结起来,DC风扇的运转原理基于电磁感应和电机转动的原理。
通过提供适当的直流电流,电机中的磁场可以驱动转子旋转,进而驱动风扇叶片产生气流。
通过电子控制电路可以控制电机的电流大小,从而调节风扇的转速和风力大小。
(完整word版)直流电机中的励磁绕组跟电枢绕组的作用分别是什么
direct current motor,DC motor中文名称:直流电动机英文名称:direct current motor,DC motor定义:将直流电能转换为机械能的转动装置。
电动机定子提供磁场,直流电源向转子的绕组提供电流,换向器使转子电流与磁场产生的转矩保持方向不变。
直流电机中的励磁绕组跟电枢绕组的作用分别是什么?电动机的作用是将电能转换为机械能。
电动机分为交流电动机和直流电动机两大类.(一)交流电动机及其控制交流电动机分为异步电动机和同步电动机两类。
异步电动机按照定子相数的不同分为单项异步电动机、两相异步电动机和三相异步电动机。
三相异步电动机结构简单,运行可靠,成本低廉等优点,广泛应用于工农业生产中。
1. 三相异步电动机的基本结构三相异步电动机的构造也分为两部分:定子与转子.(1)定子:定子是电动机固定部分,作用是用来产生旋转磁场。
它主要由定子铁心、定子绕组和机座组成。
(2)转子:转子是重点掌握的部分,转子有两种,鼠笼式与绕线式。
掌握他们各自的特点与区别。
鼠笼式用于中小功率(100k以下)的电动机,他的结构简单,工作可靠,使用维护方便。
绕线式可以改善启动性能和调节转速,定子与转子之间的气隙大小,会影响电动机的性能,一般气隙厚度为0.2—1。
5mm之间。
掌握定子绕组的接线方法。
2. 三相异步电动机的工作原理掌握公式n1=60f/P、S=(n1—n)/n1、n=(1-S)60f/P,同时明白它们的意义(很重要),要能够灵活运用这些公式,进行计算.同时记住:通常电动机在额定负载下的转差率SN约为0。
01—0.06。
书上的例题要重点掌握。
3. 三相异步电动机铭牌上的数据(1)型号:掌握书上的例子.(2)额定值:一般了解,掌握额定频率和额定转速,我国的频率为50赫兹。
(3)连接方法:有Y型和角型。
(4)绝缘等级和温升:掌握允许温升的定义。
(5)工作方式:一般了解。
4。
三相异步电动机的机械特性掌握额定转矩、最大转矩与启动转矩的关系。
直流无刷电机驱动原理
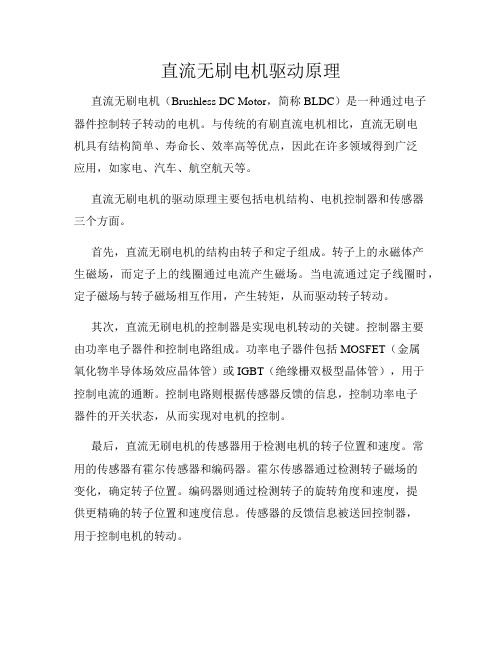
直流无刷电机驱动原理直流无刷电机(Brushless DC Motor,简称BLDC)是一种通过电子器件控制转子转动的电机。
与传统的有刷直流电机相比,直流无刷电机具有结构简单、寿命长、效率高等优点,因此在许多领域得到广泛应用,如家电、汽车、航空航天等。
直流无刷电机的驱动原理主要包括电机结构、电机控制器和传感器三个方面。
首先,直流无刷电机的结构由转子和定子组成。
转子上的永磁体产生磁场,而定子上的线圈通过电流产生磁场。
当电流通过定子线圈时,定子磁场与转子磁场相互作用,产生转矩,从而驱动转子转动。
其次,直流无刷电机的控制器是实现电机转动的关键。
控制器主要由功率电子器件和控制电路组成。
功率电子器件包括MOSFET(金属氧化物半导体场效应晶体管)或IGBT(绝缘栅双极型晶体管),用于控制电流的通断。
控制电路则根据传感器反馈的信息,控制功率电子器件的开关状态,从而实现对电机的控制。
最后,直流无刷电机的传感器用于检测电机的转子位置和速度。
常用的传感器有霍尔传感器和编码器。
霍尔传感器通过检测转子磁场的变化,确定转子位置。
编码器则通过检测转子的旋转角度和速度,提供更精确的转子位置和速度信息。
传感器的反馈信息被送回控制器,用于控制电机的转动。
总结起来,直流无刷电机的驱动原理是通过控制器控制功率电子器件的开关状态,使电流按照一定的顺序流过定子线圈,从而产生转矩驱动转子转动。
传感器则用于检测转子位置和速度,提供反馈信息给控制器,实现对电机的精确控制。
直流无刷电机驱动原理的应用非常广泛。
在家电领域,直流无刷电机被广泛应用于洗衣机、冰箱、空调等产品中,提高了产品的效率和可靠性。
在汽车领域,直流无刷电机被用于驱动电动汽车的电机,实现零排放和高效能。
在航空航天领域,直流无刷电机被用于驱动飞机的舵机和飞行控制系统,提高了飞行的稳定性和安全性。
总之,直流无刷电机驱动原理是一种高效、可靠的电机驱动方式。
通过控制器和传感器的配合,实现对电机的精确控制,使其在各个领域发挥出更大的作用。
新能源汽车驱动电机分类及其特点

新能源汽车驱动电机分类及其特点1.根据结构和工作原理分类驱动电机按照工作电源种类可分为直流电机和交流电机。
按结构和工作原理可分为直流电机、异步电机、同步电机。
目前,在新能源汽车领域,常用的驱动电机有直流电机(DC Motor)、感应电机(IM)、直流无刷电机(BLDC)、永磁同步电机(PMSM)以及开关磁阻电机(SRM)等。
(1)直流电机。
在电动汽车发展的早期,很多电动汽车都是采用直流电机方案。
主要是看中了直流电机的产品成熟,控制方式容易,调速优良的特点。
但由于直流电机本身的短板非常突出,其自身复杂的机械结构(电刷和机械换向器等),制约了它的瞬时过载能力和电机转速的进一步提高;而且在长时间工作的情况下,电机的机械结构会产生损耗,提高了维护成本。
此外,电机运转时的电刷火花会使转子发热,浪费能量,散热困难,还会造成高频电磁干扰,这些因素都会影响整车性能。
由于直流电机的缺点非常突出,目前的电动汽车已经将直流电机淘汰。
(2)交流异步电机。
交流异步电机是目前工业中应用十分广泛的一类电机,其特点是定、转子由硅钢片叠压而成,两端用铝盖封装,定、转子之间没有相互接触的机械部件,结构简单,运行可靠耐用,维修方便。
交流异步电机与同功率的直流电机相比效率更高,质量约轻了1/2。
如果采用矢量控制的控制方式,可以获得与直流电机相媲美的可控性和更宽的调速范围。
由于有着效率高、比功率较大、适合于高速运转等优势,交流异步电机是目前大功率电动汽车上应用较广的电机。
但在高速运转的情况下电机的转子发热严重,工作时要保证电机冷却,同时交流异步电机的驱动、控制系统很复杂,电机本体的成本也偏高,另外,运行时还需要变频器提供额外的无功功率来建立磁场,故相与永磁电机和开关磁阻电机相比,交流异步电机的效率和功率密度偏低,不是能效化的选择。
汽车一般以一定的高速持续行驶,所以能够让高速运转而且在高速时有较高效率的交流异步电机得到广泛应用。
(3)永磁同步电机。
直流电机名词解释

直流电机名词解释直流电机(DCMotor)是一种产生机械能和电能转换的机械装置,其特点是电路有较低损耗,运行维护方便,在很多领域被广泛应用。
简言之,直流电机就是利用直流电源驱动电机输出机械能动力的一种电机,其构造简单、结构小巧、重量轻、不依赖环境温度和湿度及气压,具有运行稳定、控制便捷等特点。
因此,直流电机广泛应用于医疗仪器、建筑设备、工业设备等等。
直流电机的构造主要由主轴、端盖、定子绕组、转子绕组、刷子等部分组成。
主轴的作用是将电机产生的转动能动用于被驱动的机器,端盖的作用是将外界环境中的灰尘等物质排出电机外;定子绕组和转子绕组分别是产生交流电流和交流电场,随着旋转而使电机产生转动能力;刷子的作用是将电源中的电流顺利传送到电机绕组处。
直流电机又可分为永磁直流电机、定子磁励直流电机、转子磁励直流电机、磁电控制直流电机等。
永磁直流电机具有单片永磁体作为感应极,有能量节省、运行可靠、维护简单的特点,其应用范围广泛,如离心泵、空调机、纺织机等;定子磁励直流电机就是在定子绕组上通恒定时间周期变化的电压,其有利于电机保持稳定,比较常用于风车、矿物入库机等;转子磁励直流电机就是在转子上引入磁铁,使定子绕组产生励磁电流,其有较快的转速变化,比较常用于汽车、电梯等;磁电控制直流电机就是将调速驱动系统中的变压器、整流器、控制器三部件一起应用,使控制变得更加精确,比较常用于电动工具、精密机床等。
电路中控制直流电机运行的电流大小是闭环控制,主要分两类:一种是无功控制,即调节电流大小,改变电机的转速;另一种是有功控制,即调节功率,从而控制电机的转速。
无功控制电路如图1所示,主要是由放大器、可调电阻和分压电阻组成的调速闭环电路,可调电阻调节电机的速度,从而实现速度调节;而有功控制电路如图2所示,它主要是由比调管、可调电阻和变频器组成的调速闭环电路,可调电阻调节变频器功率,从而实现相应的电机速度调节。
就直流电机而言,采用调速技术可以提高运行精度,减低电机的耗能,进一步提高电机的运行效率,为电机应用提供更多的控制条件,更好的满足产品的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
HB式步进电机是PM式和VR式的复合形式。在永磁体转子和电磁铁定子的 表面上加工出许多轴向齿槽,产生转矩的原理与PM式相同,转子和定子的形状 与VR式相似,步距角一般为0.9o~15o。
定位转矩是指电机各相绕组不通电且处于开路状态时,定子锁 住转子的力矩。由于混合式电机转子上有永磁材料产生磁场,从而 产生的转矩。一般定位转矩远小于保持转距。是否存在定位转距是 混合式步进电机区别于反应式步进电机的重要标志。 DETENT TORQUE 在国内没有统一的翻译。
细分驱动器的原理 通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角
失步:电机运转时运转的步数,不等于理论上的步数。
保持转距(HOLDING TORQUE)或静转矩是指步进电机各相 通电但没有转动时,定子锁住转 子的力矩。是电机选型时最重要的 参数之一。通常步进电机在低速时的力矩接近保持转矩。比如,当 说2Nm的步进电机时,在没有特殊说明的情况下一般是指保持转矩 为2Nm的步进电机。
形状记忆合金执行装置:利用镍钛合金等材料具有的形状随 温度变化,温度恢复时形状也恢复的形状记忆性质。
运动 控制
卡
端子 板
驱动 器
数字 计算
机
图像 采集
卡
A/D
执行装置(电 机、液压等)
执行机构 (臂、手等)
传感器(视 觉、触觉等)
环境 (控制 对象)
8.1 直流电机驱动(DC motor)
止口
1. 直流电机工作原理
2.矩频特性曲线
3.交流电机的特点 特点:无电刷和换向器,无产生火花的危险;比直流电机的
驱动电路复杂、价格高。 同步电机的特点:体积小。用途:要求响应速度快的中等速
度以下的工业机器人;机床领域。
异步电机的特点:转子惯量很小,响应速度很快。用途:中 等功率以上的伺服系统。 4.交流电机的控制方式
改变定子绕组上的电压或频率,即电压控制或频率控制方式。 伺服电机的精度由编码器的精度决定。
来控制步进电机运转的。
驱动器细分后的主要优点: (1)完全消除了电机的低频振荡。 (2)同时也提高了电机的输出转矩。 (3)提高了电机的分辨率。
3. 运行矩频特性
起动曲线
运行曲线
电刷
左 手 定 则
换向器
T=BILr
直流电动机通过 换向器将直流转 换成电枢绕组中 的交流,从而使 电枢产生一个恒 定方向的电磁转 矩。
►直流伺服电机的机械特性
转速
n Uc R T
Ke Ke Kt 2
控制 电压
电机结 构常数
电枢回路电阻
负载 转矩
每极 磁通
电机转速的控制:“调压调速”(★) “调磁调速”
2. 矩频特性曲线:电流控制曲线和电压控制曲线。
T (V K E)KT
R
其中,KE为电 动势常数, KF 为转矩常数。
3. 直流电机的控制方式 改变电压或电流控制转速和转距。
PWM (Pulse Width Modulation)控制是利用脉宽调制器对大功率晶体管开关放 大器的开关时间进行控制,将直流电压转换成某一频率的矩形波电压,加到直 流电机的电枢两端,通过对矩形波脉冲宽度的控制,改变电枢两端的平均电压 达到调节电机转速的目的。
第八章 机器人的驱动
这里所说的机器人驱动就是机电一体化系统中的执行装置。
执行装置就是按照电信号的指令,将来自电、液压和气压等 各种能源的能量转换成旋转运动、直线运动等方式的机械能的装 置。按利用的能源来分类,主要可分为电动执行装置、液压执行 装置和气动执行装置。
新型执行装置:
压电执行装置:利用在压电陶瓷等材料上施加电压而产生变 形的压电效应。
8.3 步进电机驱动(stepping motor)
步进电机驱动系统主要用于开环位置控制系统。优点:控制 较容易,维修也较方便,而且控制为全数字化。缺点:由于开环 控制,所以精度不高。
1.工作原理 步进电机是一种将电脉冲转化为角位移的执行机构。简单说: 当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的 方向转动一个固定的角度(及步进角)。可以通过控制脉冲个数 来控制角位移量,从而达到准确定位的目的;同时可以通过控制 脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机有三种:永磁式PM(permanent magnet);反应式 (也称可变磁阻式)VR(variable reluctance),在欧美等发达国 家80年代已被淘汰;混合式 HB(hybrid),混合式是指混合了永 磁式和反应式的优点,混合式步进电机的应用最为广泛。
Байду номын сангаас
PM式步进电机转子是永磁体,定子是绕组,在定子电磁铁和转子永磁体之 间的排斥力和吸引力的作用下转动,步距角一般为7.5o~90o。
同步电机:所谓同步是指转子速度与定子磁场速度相同。若 电网的频率不变,则稳态时同步电机的转速恒为常数而与负载的 大小无关。可用作发电机。 n=ns=60f/p
异步电机:所谓异步是指转子磁场和定子间存在速 度差(不 是角度差)。只用于电动机。 n=60f/p(1-s)
它们的定子绕组是相同的,主要区别在于转子的结构。同步电机 的转子上有直流励磁绕组,所以需要外加励磁电源,通过滑环引 入直流电流;而异步电机的转子是短路的绕组,靠电磁感应产生 电流。相比之下,同步电机较复杂,造价高。
4. 直流电机的特点 优点:调速方便(可无级调速),调速范围宽,低速性能好
(启动转矩大,启动电流小),运行平稳,转矩和转速容易控制。
缺点:换相器需经常维护,电刷极易磨损,必须经常更换, 噪音比交流电机大。
书籍是进步的阶梯
8.2 交流电机驱动(AC motor)
止口
AC servomotor
1. 工作原理
2. 相关术语
相数:产生不同N、S对磁场的激磁线圈对数。 拍数:完成一个磁场周期性变化所需脉冲数或导电状态。四 相四拍运行方式:AB-BC-CD-DA-AB,四相八拍运行方式: AAB-B-BC-C-CD-D-DA-A.
步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。 一般步进电机的精度为步距角的3-5%,且不累积。