捷联惯导系统在声振综合环境下的动力学响应特性研究
激光陀螺捷联惯导系统IMU结构模态分析

激光陀螺捷联惯导系统IMU结构模态分析刘昱;王伟;李城锁【期刊名称】《中国惯性技术学报》【年(卷),期】2012(020)003【摘要】随着机抖激光陀螺捷联惯导系统以其诸多优点在军用与民用导航领域得到广泛的应用,对其体积和重量的要求变得越来越严格.机抖激光捷联惯导系统IMU 小型化设计的关键在于减振系统的设计,而减振器仿真模型的建立是该减振系统模态仿真分析的难点.针对这一问题,提出一种通过ANSYS中的“Bushing连接”来模拟减振器的方法,并利用模态实验结果修正其参数,最终建立了一个准确的减振器模型,实现了对捷联惯导IMU振动模态的精确仿真与分析,为其IMU结构的进一步小型化设计奠定了基础,%The strap-down inertial navigation system with mechanically dithered ring laser gyro is widely used in the field of military and civilian navigation with many advantages, and the requirements of its size and weight become more and more stringent. The design of damping system is the key to the system miniaturized design. However, the establishment of damper simulation model is difficult in modal simulation analysis of damping system. To solve this problem, a method using "Bushing Joint" in ANSYS to simulate the damper is proposed, and the modal experiment results are used to correct its parameters. Finally, a precise model of damper is established, which can be used to implement accurate simulation and analysis for the vibration modal of strap-downinertial navigation IMU. It lays the foundation for the further miniaturized design of IMU structure.【总页数】5页(P273-277)【作者】刘昱;王伟;李城锁【作者单位】天津航海仪器研究所,天津300131;天津航海仪器研究所,天津300131;天津航海仪器研究所,天津300131【正文语种】中文【中图分类】U666.1【相关文献】1.激光陀螺捷联惯导系统的误差参数标定方法 [J], 冯杨;徐庆九2.单轴旋转式激光陀螺捷联惯导系统对准精度分析 [J], 刘永红;刘明雍;谢波3.激光陀螺捷联惯导系统外场快速标定新方法 [J], 贾继超;秦永元;张波;吴训忠4.旋转式激光陀螺捷联惯导系统抗干扰对准方法 [J], 刘永红;刘明雍;滕浩军;谢波5.激光陀螺捷联惯导系统参数稳定性与外场自标定 [J], 吴文启;张岩;张晓强;潘献飞因版权原因,仅展示原文概要,查看原文内容请购买。
基于延时对准船用捷联惯导舒勒振荡抑制方法

基于延时对准船用捷联惯导舒勒振荡抑制方法
赵琳;李久顺;程建华;贾春;王秋帆
【期刊名称】《系统工程与电子技术》
【年(卷),期】2016(038)010
【摘要】针对捷联惯性导航系统精度受振荡误差影响的问题,提出了一种舒勒振荡误差抑制方法.基于捷联惯导系统可并行执行多套导航算法的特点,通过延长初始对准时间,使得导航算法2相对于导航算法1延迟半个舒勒振荡误差周期执行.延时对准使得算法2中舒勒振荡误差相位与算法1相差一个圆周率.取算法1和算法2相应导航输出结果的均值补偿舒勒振荡误差,达到了提高捷联惯导系统精度的目的.经过仿真和实验验证,该方法对船用捷联惯性导航系统的舒勒振荡误差具有良好的抑制效果.
【总页数】6页(P2375-2380)
【作者】赵琳;李久顺;程建华;贾春;王秋帆
【作者单位】哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;北京自动化控制设备研究所,北京100074
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.基于逆向导航算法的捷联惯导/转速计组合对准方法 [J], 张福斌;董权威
2.基于CKF捷联惯导传递对准方法 [J], 欧野;刘庆元;丰趁得
3.基于CKF捷联惯导传递对准方法 [J], 欧野;刘庆元;丰趁得;
4.基于粒子群优化的舰船捷联惯导初始对准方法 [J], 徐博;赵晓伟;金坤明
5.船用捷联惯导系统在系泊状态下的快速初始对准方法 [J], 程向红;万德钧;房建成因版权原因,仅展示原文概要,查看原文内容请购买。
《2024年捷联惯性导航系统关键技术研究》范文
《捷联惯性导航系统关键技术研究》篇一一、引言捷联惯性导航系统(SINS)是一种利用惯性测量单元(IMU)来获取和解析导航信息的先进技术。
它以其高精度、高动态性以及全自主工作的特性,在航空、航天、航海、车辆导航等领域中发挥着重要的作用。
本文将深入探讨捷联惯性导航系统的关键技术研究,从系统组成、工作原理、技术难点到解决方案等方面进行详细阐述。
二、系统组成与工作原理捷联惯性导航系统主要由惯性测量单元(IMU)、导航计算机、算法处理软件等部分组成。
其中,IMU是系统的核心,它包括加速度计和陀螺仪,用于实时测量载体在三维空间中的运动状态。
导航计算机则负责采集IMU的数据,通过算法处理软件进行数据解析和处理,最终输出导航信息。
捷联惯性导航系统的工作原理主要依赖于牛顿第二定律和角动量守恒定律。
通过测量载体的加速度和角速度,系统可以推算出载体的运动轨迹和姿态信息,从而实现导航定位。
三、关键技术研究1. 高精度IMU技术研究IMU的精度直接影响到整个系统的导航精度,因此提高IMU 的精度是捷联惯性导航系统的关键技术之一。
当前,研究者们正在通过优化加速度计和陀螺仪的设计和制造工艺,提高其测量精度和稳定性。
此外,采用先进的滤波算法和校准技术,也可以有效提高IMU的精度。
2. 算法优化技术研究算法是捷联惯性导航系统的核心,其优化程度直接影响到系统的性能。
目前,研究者们正在致力于开发更加高效的算法,以实现更快的数据处理速度和更高的导航精度。
同时,针对不同应用场景,如高动态、强干扰等环境,研究者们也在进行相应的算法优化工作。
3. 系统误差校正技术研究由于惯性器件的误差积累和环境干扰等因素的影响,捷联惯性导航系统在长时间工作时会产生较大的误差。
因此,系统误差校正是捷联惯性导航系统的另一个关键技术。
研究者们正在通过建立更加精确的误差模型,采用先进的校正算法和技术手段,对系统误差进行实时校正,以保证系统的导航精度和稳定性。
四、结论捷联惯性导航系统是一种重要的导航技术,具有广泛的应用前景。
捷联惯导减振器参数估计与光纤环应力响应分析
fe u n ybn ,n x l n erao i e u n y 2cu i er p nec reo O sr rq e c a d a diepa s h esno h q e c /u ta o i t e o s uv t i t f t n nh s fF G’ 一
a ay i f p i- i e ig n lsso t f r n s o c b r
TI AN ng, Yo ZHA NG Bo
( e n nvri h te cr eh o g s tt , ej g1 0 1C ia B i g i syP ool tcT c nl yI tueB ni 0 ,hn ) Ha U e t e i o ni n 1 9
d m vbain ial, dc e a te b rr g Sm eil t n s a dg o er aa eesh v o ir o . n y i i ia s h e— i ’ a r i es n e m t p rm tr ae t F l t n t tt h f i n t a sf f y
中 图分类 号 :H1 , 2 1 2 文献标 识 码 : T 6V 4 . 6 A
—
— .
—
1刖 画 1 —
捷 联 惯 导 系统 经 常 工 作 在 强振 动 的力 学 环 境 中 ,严 重 影 响
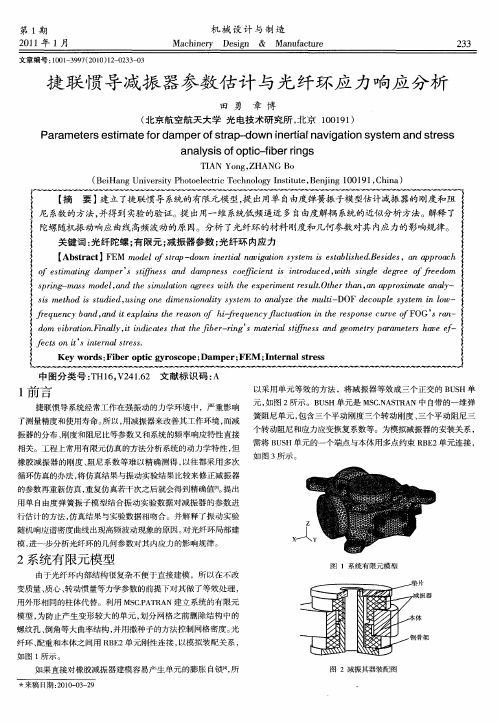
以采用单元等效 的方法 ,将减振器等效成三个正交 的 B S U H单 元 , 图 2所示。B S 如 U H单元是 MS .A T A CN S R N中 自带的一维弹 簧阻尼单元 , 包含 三个平 动刚度 三个转 动刚度 、 三个平动阻尼三 个转动阻尼和应力应变恢复系数等 。为模拟减振器的安装关系 , 需将 B S U H单元 的一个端点与本体用 多点约束 R E B 2单元连接 ,
线振动条件下激光陀螺捷联惯导附加漂移补偿技术

线振动条件下激光陀螺捷联惯导附加漂移补偿技术钟明飞;朱栋山;姜永刚;韩松来;汤建勋【摘要】针对振动条件下惯性器件会产生较大漂移的问题,从导航误差方程出发,以速度和位置误差作为观测量,设计了双位置卡尔曼滤波初始对准测漂方法.利用这种方法对振动条件下系统中激光陀螺的零漂和加速度计的零位的变化进行了估计;同时在导航解算过程中对惯性器件的振动附加漂移进行补偿.振动条件下对准测漂实验表明:利用双位置卡尔曼滤波方法可以很好的估计出惯性器件的振动附加漂移.振动漂移误差补偿实验表明:在导航结算过程中对惯性器件的振动漂移进行有效补偿后导航精度明显提高.【期刊名称】《科学技术与工程》【年(卷),期】2015(015)005【总页数】5页(P151-154,184)【关键词】激光陀螺;惯性导航;卡尔曼滤波器【作者】钟明飞;朱栋山;姜永刚;韩松来;汤建勋【作者单位】中国卫星海上测控部,江阴214431;中国卫星海上测控部,江阴214431;中国卫星海上测控部,江阴214431;国防科学技术大学光电科学与工程学院,长沙410073;国防科学技术大学光电科学与工程学院,长沙410073【正文语种】中文【中图分类】U666.12激光陀螺捷联惯导在飞机等系统中应用时,随机振动是它主要的力学环境[1—4]。
在振动环境中激光陀螺捷联惯导系统的精度下降很大。
一般认为振动包含线振动和角振动两种方式。
对线振动环境中激光陀螺捷联惯导系统的振动附加漂移进行了有效估计和补偿,实验表明,在线振动环境中对激光陀螺捷联惯导系统进行附加漂移补偿,是非常有必要的。
惯性导航系统的初始对准一般分为粗对准和精对准两个阶段。
考虑到惯性器件在振动环境中漂移估计的准确性以及对准方案的可行性,采用两位置卡尔曼滤波对准法[5,6],即在初始对准阶段,将激光陀螺捷联惯导系统绕某一个轴旋转到另一位置。
当系统绕航向轴旋转180°时,除天向激光陀螺漂移之外,其他惯性器件的漂移都能得到很好的估计。
《2024年捷联惯性导航系统关键技术研究》范文

《捷联惯性导航系统关键技术研究》篇一一、引言捷联惯性导航系统(SINS)是现代导航技术的重要组成部分,其利用惯性测量单元(IMU)来感知和计算导航信息,具有自主性强、抗干扰能力强等优点。
随着科技的发展,SINS在军事、民用等领域的应用越来越广泛,对其关键技术的研究也显得尤为重要。
本文将针对捷联惯性导航系统的关键技术进行研究,旨在为相关研究与应用提供参考。
二、SINS基本原理与组成SINS主要由惯性测量单元(IMU)、导航算法和数据处理单元等部分组成。
其中,IMU是SINS的核心部件,包括加速度计和陀螺仪等传感器,用于测量载体的加速度和角速度。
导航算法则根据IMU测量的数据,通过积分运算和坐标变换等手段,实现载体的姿态、速度和位置的解算。
数据处理单元则负责对导航算法输出的数据进行处理和优化,以提高导航精度和稳定性。
三、SINS关键技术研究1. IMU技术研究IMU是SINS的核心部件,其性能直接影响到SINS的导航精度和稳定性。
因此,IMU技术的研究是SINS关键技术之一。
目前,高精度、小型化、低功耗的IMU是研究的重点。
其中,光纤陀螺仪和微机电系统(MEMS)技术的发展,为IMU的小型化和低成本化提供了可能。
此外,为了提高IMU的测量精度和稳定性,还需要研究高性能的传感器技术和信号处理技术。
2. 导航算法研究导航算法是SINS的核心技术之一,其性能直接影响到SINS 的导航精度和实时性。
目前,常用的导航算法包括经典的最小二乘法、卡尔曼滤波算法等。
然而,这些算法在处理复杂环境下的导航问题时,往往存在精度不高、实时性差等问题。
因此,研究更加高效、精确的导航算法是SINS研究的重点。
例如,基于神经网络、深度学习等人工智能技术的导航算法,具有较高的应用潜力。
3. 数据处理与优化技术研究数据处理与优化技术是提高SINS导航精度和稳定性的重要手段。
目前,常用的数据处理技术包括数据滤波、数据融合等。
其中,数据滤波可以消除测量数据中的噪声和干扰,提高数据的信噪比;数据融合则可以将多种传感器数据进行融合,提高导航信息的可靠性和精度。
《2024年捷联惯性导航系统关键技术研究》范文
《捷联惯性导航系统关键技术研究》篇一一、引言随着科技的进步,导航系统在众多领域如航空、航天、机器人等领域扮演着至关重要的角色。
其中,捷联惯性导航系统(Inertial Navigation System,简称INS)因其具有独立性强、实时性高和隐蔽性好的特点,成为众多导航系统中重要的技术手段。
本文旨在探讨捷联惯性导航系统的关键技术及其发展趋势。
二、捷联惯性导航系统概述捷联惯性导航系统基于惯性传感器(如陀螺仪和加速度计)的测量原理,将物理信息转化为电信号,以实现对载体姿态、速度和位置的实时解算。
相较于传统的平台式惯性导航系统,捷联式结构更加简单、体积更小、可靠性更高。
三、关键技术研究1. 惯性传感器技术惯性传感器是捷联惯性导航系统的核心部件,其性能直接决定了系统的精度和稳定性。
目前,高精度、低噪声的陀螺仪和加速度计是研究的重点。
此外,微机电系统(MEMS)技术的发展为惯性传感器的小型化、低成本化提供了可能。
2. 算法研究算法是捷联惯性导航系统的灵魂,其性能直接影响到系统的解算精度和实时性。
目前,主要的算法包括姿态解算算法、速度和位置解算算法、误差补偿算法等。
其中,基于卡尔曼滤波的姿态和位置解算算法是研究的热点。
此外,随着人工智能技术的发展,基于深度学习、神经网络的算法也在逐渐应用于捷联惯性导航系统中。
3. 系统集成与优化系统集成与优化是提高捷联惯性导航系统性能的重要手段。
这包括硬件电路的优化设计、软件算法的优化以及系统整体性能的评估与优化等。
通过优化设计,可以在保证系统性能的前提下,减小系统的体积和成本,提高系统的可靠性。
四、发展趋势1. 高精度化:随着科技的进步,对导航系统的精度要求越来越高。
因此,进一步提高惯性传感器的精度、优化算法、减少误差等是未来的重要研究方向。
2. 智能化:随着人工智能技术的发展,将人工智能技术应用于捷联惯性导航系统中,提高系统的自主性、智能性和适应性是未来的重要趋势。
3. 微型化:随着微机电系统(MEMS)技术的发展,捷联惯性导航系统的微型化、低成本化将成为可能。
捷联惯导系统
(3)无框架锁定系统,允许全方位(全姿态)工作。
(4)除能提供平台式系统所能提供的所有参数外,还可以提供沿弹 体三个轴的速度和加速度信息。
缺点:
但是,由于在捷联惯导系统中,惯性元件与载体直接固连, 其工作环境恶劣,对惯性元件及机(弹)载计算机等部件也 提出了较高的要求。
(1)要求加速度表在宽动态范围内具有高性能、高可靠性, 且能数字输出。
1.4捷联惯导系统的精度
惯性导航和制导系统对陀螺仪和加速度计的精度要求极高, 如加速度计分辨率通常为0.0001g~0.00001g,陀螺随机漂 移率为0.01°/小时甚至更低,并且要求其有大的测量范围, 如军用飞机所要求的测速范围应达10的9次方(0.01°/小 时~400°/秒)。因此,陀螺仪和加速度计属于精密仪表范 畴。
“数学解析平台”的原理简图
捷联惯导优点:
捷联惯导系统和平台式惯导系统一样,能精确提供载体的姿态、地 速、经纬度等导航参数。但平台式惯导系统结构较复杂、可靠性较 低、故障间隔时间较短、造价较高,为可靠起见,通常在一个运载 体上要配用两套惯导装臵,这就增加了维修和购臵费用。在捷联惯 导系统中,由于计算机中存储的方向余弦解析参考系取代了平台系 统以物理形式实现的参考系,因此,捷联惯导系统有以下独特优点。 (1)去掉了复杂的平台机械系统,系统结构极为简单,减小了系统 的体积和重量,同时降低了成本,简化了维修,提高了可靠性。 (2)无常用的机械平台,缩短了整个系统的启动准备时间,也消除 了与平台系统有关的误差。
为测量基准,它不再采用机电平台,惯性平台的功能由计算 机完成,即在计算机内建立一个数学平台取代机电平台的功 能,其飞行器姿态数据通过计算机计算得到,故有时也称其 为"数学平台",这是捷联惯导系统区别于平台式惯导系统的 根本点。由于惯性元器件有固定漂移率,会造成导航误差, 因此,远程导弹、飞机等武器平台通常采用指令、GPS或其 组合等方式对惯导进行定时修正,以获取持续准确的位臵参 数。如采用指令+捷联式惯导、GPS+惯导(GPS/INS)。美国 的战斧巡航导弹采用了GPS+INS +地形匹配组合导航。
《2024年捷联惯性导航系统关键技术研究》范文
《捷联惯性导航系统关键技术研究》篇一一、引言捷联惯性导航系统(SINS)是一种基于惯性测量单元(IMU)的导航技术,其通过测量物体的加速度和角速度信息,结合数字积分算法,实现对物体运动状态的精确估计和导航。
SINS具有高精度、抗干扰能力强、无需外部辅助等优点,在军事、航空、航天、航海等领域具有广泛的应用前景。
本文将重点研究捷联惯性导航系统的关键技术,包括传感器技术、算法技术以及系统集成技术。
二、传感器技术研究1. 陀螺仪技术陀螺仪是SINS的核心部件之一,其性能直接影响到整个系统的精度和稳定性。
目前,常用的陀螺仪包括机械陀螺、光学陀螺和微机电系统(MEMS)陀螺等。
其中,MEMS陀螺因其体积小、重量轻、成本低等优点,在SINS中得到了广泛应用。
然而,MEMS陀螺的精度和稳定性仍需进一步提高。
因此,研究高性能的MEMS陀螺制造技术和材料,以及优化其工作原理和结构,是提高SINS性能的关键。
2. 加速度计技术加速度计是SINS的另一个重要传感器,其测量精度和稳定性对SINS的导航性能有着重要影响。
目前,常用的加速度计包括压阻式、电容式和压电式等。
为了提高加速度计的测量精度和稳定性,需要研究新型的加速度计制造技术和材料,以及优化其电路设计和信号处理算法。
三、算法技术研究1. 姿态解算算法姿态解算算法是SINS的核心算法之一,其目的是通过陀螺仪和加速度计的测量数据,计算出物体的姿态信息。
目前常用的姿态解算算法包括欧拉角法、四元数法和卡尔曼滤波法等。
为了提高算法的精度和实时性,需要研究新型的姿态解算算法,如基于机器学习的姿态解算方法等。
2. 误差补偿算法由于传感器自身的误差和外部环境的影响,SINS在运行过程中会产生误差。
为了减小误差对系统性能的影响,需要研究误差补偿算法。
目前常用的误差补偿算法包括基于模型的方法和基于数据的自适应补偿方法等。
研究新型的误差补偿算法和技术手段是提高SINS性能的重要方向。
四、系统集成技术研究1. 数据融合技术数据融合技术是将来自不同传感器的数据信息融合起来,以提高导航系统的整体性能。
一种计算声振系统中高频动力学响应的方法[发明专利]
专利名称:一种计算声振系统中高频动力学响应的方法专利类型:发明专利
发明人:雷烨,盛美萍,肖和业
申请号:CN201110238254.3
申请日:20110818
公开号:CN102411673A
公开日:
20120411
专利内容由知识产权出版社提供
摘要:本发明提出一种计算声振系统中高频动力学响应的方法,首先将被研究的声振系统划分为N个子系统,其次确定模态能量分析方法和统计能量分析方法适用的分析频率范围,当分析频率处于中频范围内,采用模态能量分析方法计算被研究的声振系统中频动力学响应,模态能量分析方法首先确定所有子系统中频范围内具有的共振模态数目和共振频率值,其次建立N个子系统的共振模态之间的功率流平衡关系,最后由功率流平衡关系求解所有子系统各模态的模态能量,分别对每个子系统在分析频带内的模态的模态能量求和,得到各个子系统在分析频带内的能量响应;当分析频率处于高频范围内,采用统计能量分析方法计算被研究的声振系统高频动力学响应。
申请人:西北工业大学
地址:710072 陕西省西安市友谊西路127号
国籍:CN
代理机构:西北工业大学专利中心
代理人:陈星
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2 卷
第2 期
导航定位 与授 时
Na v i g a t i o n Po s i t i o ni ng& Ti mi n g
V b l _ 2 No- 2
2 0 1 5 年3 月
Ma r c h 2O l 5
捷 联 惯 导 系统在 声 振 综 合环 境 下 的 动 力 学 响应 特 性 研 究
i c e q u i p me n t s o te f n s u f f e r . I t i s a r g u e d t h a t i n t h i s p a p e r , F E M me t h o d c a n b e a p p l i e d t o s i mu l a t e v i b r o — a c o u s t i c c o u p l e d
St udy o n Dy na mi c Re s po ns e o f SI NS t o Vi br o — a c o us t i c Co mb i ne d Env i r o nm e nt
Y A 0 J i a n - j u n , YU S h e n g - q i a n g , Z HE N R u i , Y A N Ho n g — s o n g , Y N I Z e n g — z h e n , L I U Z h i - j u n ( B e i j i n g I n s t i t u t e o f A u t o ma t i c C o n t r o l E q u i p me n t , B e i j i n g 1 0 0 0 7 4 , C h i n a )
v i b r o — a c o u s t i c c o mb i n e d e n v i r o n me n t i s s i mu l a t e d , a n d c o n t r a s t e d wi t h t h e r e s p o n s e t o r a n d o m v i b r a t i o n e n v i r o n me n t
Ab s t r a c t : Al o n g wi t h t h e e n h a n c e me n t o f s p a c e c r a t’ f S l f i g h t v e l o c i t y , a c o u s t i c e n v i r o n me n t c a n n o t b e n e g l e c t e d , a n d v i — b r o . a c o u s t i c c o mb i n e d e n v i r o n me n t i S t h e me c h a n i c s e n v i r o n me n t c o n d i t i o n ha t t S I NS a n d o he t r mi s s i l e — b o ne r e l e c t r o n .
a n d he t r e s p o n s e t o a c o u s t i c e n v i r o n me n t . Th e n i t s c h a r a c t e r i s t i c s a r e e d u c e d . T h e c o n c l u s i o n s a r e h e l p f u l t o d e s i g n o r e v a l u a t e l a n d d y n a mi c e x p e r i me n t a t i o n , a n d p r e d i c t o r a n a l y s e e n v i r o n me n t a l wo r t h i n e s s o f S N S I u n d e r v i b r o — a c o u s t i c c o mb i n e d e n v i r o n me n t .
姚建军,余盛强,甄 瑞,闫红松,殷增振,刘 志军
( 北 京 自动 化 控 制 设 备 研 究所 。北 京 1 0 0 0 7 4 )
摘要 :随着 导 弹等航 天器 飞行 速 度 的提 高 ,环境 噪 声 的影 响 已不容 忽视 ,声振 综合 环境 将成 为惯 导 系统 等 弹上 电子设 备 通 常需 要面 对 的力 学环境 条 件 。文 章论 证 了有 限元 法适 用 于对捷 联 惯 导系 统这 类结构 紧凑 型设备 进行 宽 频域 声振耦 合 计算 ,仿 真 计算 了捷 联 惯 导系 统 声振耦 合模 型在 声振 综合环 境 下 的动力 学 响应 ,对 比分析 了捷 联 惯 导系 统在 声振 综合环 境 下 与在 单独 随机 振 动环境 、单独 噪 声场 环境 下 动力 学响 应 的联 系 、 区别 以及 自 身 新 的特 点 。研 究结 论 可为设 计 和评 估地 面力 学 环境 试验 、预 示与分 析 惯 导系 统在 综合 环境 下 的环 境 适应 性提供 理论 依 据 。 关键 词 :捷 联 惯导 系统 ;综合 环境 ; 声振 耦合 ; 动力 学响应 中图分 类号 :V 4 1 4 . 1 文 献标 志码 :A 文 章编 号 :2 0 9 5 — 8 1 1 0( 2 0 1 5 )0 2 . 0 0 7 3 — 0 8