完整版系统仿真答案
交通系统仿真技术智慧树知到课后章节答案2023年下武汉科技大学

交通系统仿真技术智慧树知到课后章节答案2023年下武汉科技大学武汉科技大学第一章测试1.硬件在环仿真是在物理仿真和基础上发展起来的()。
答案:数学仿真2.迅速发展阶段,微观交通仿真模型得到了很好的发展,其中典型的代表是美国联邦公路局开发的模型()。
答案:NETSIM3.下列属于成熟阶段典型交通仿真软件的是()。
答案:TransCad4.交通规划中的“四阶段”交通预测分析模型是典型的微观交通仿真模型。
( )答案:错5.交通仿真模型需要进行验证和标定,并进行有效性检验。
()答案:对6.系统是指相互联系又相互区别的对象之间的有机结合。
()答案:错7.数字仿真技术具有经济、安全、可重复和不受气候、场地、时间限制的优势,被称为除理论推导和科学试验之外的人类认识自然、改造自然的第三种手段。
()答案:对8.宏观交通仿真不仅要考虑个体车辆的运动,而且还要选择颗粒度较大的宏观参数来描述交通流。
()答案:错9.成熟阶段,交通仿真系统大多采用面向对象的软件开发方法,开发工具更加具有多样性,仿真系统的__________得到了很大的提高()。
答案:可扩展性;可维护性;通用性;交互性10.下列属于交通仿真优点的是()。
答案:安全性;经济性;可重复性第二章测试1.交叉口内的其他转向也是通过基于车道的连接段进行连接的,完整的内部连接共需要条转向连接段,每条连接段都是相互独立的()。
答案:122.路段建模方法中基于车道的建模方法具有什么缺点()?答案:不合理的连接方案会影响仿真效果3.在车道变化段,通过连接段将不同属性的路段连接起来,连接段的属性也是以车道作为基本单位统一进行设置。
()答案:对4.按照管理和控制措施,可以分为全无管制交叉口和信号控制交叉口。
()答案:错5.车辆行驶到平面交叉口内部,所有的车辆都是进入到同一个面域中,车流之间的冲突不能在面域内部统一协调,因此需要处理车道间的冲突。
()答案:错6.根据交通规则,进环的车流应当让行环内行驶的车流,冲突区域设置成进环车道红色、环内车道绿色的状态。
控制系统数字仿真与CAD第一二章习题答案
1-1什么是仿真?它所遵循的基本原则是什么?答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统汁数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。
它所遵循的基本原则是相似原理。
1-2在系统分析与设计中仿真法与解析法有何区別?各有什么特点?答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,il•算。
它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。
由于受到理论的不完善性以及对事物认识的不全而性等因素的影响,其应用往往有很大局限性。
仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法。
1-3数字仿真包括那几个要素?其关系如何?答:通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与让算机。
由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题:将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验。
1-4为什么说模拟仿真较数字仿真精度低?其优点如何?o答:由于受到电路元件精度的制约和容易受到外界的下•扰,模拟仿真较数字仿真精度低但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真。
(2)仿真速度极快,失真小,结果可信度髙。
(3)能快速求解微分方程。
模拟汁算机运行时0运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关。
(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真。
(5)易于和实物相连。
1-5什么是CAD技术?控制系统CAD可解决那些问题?答:CAD技术,即计算机辅助设计(Computer Aided Design),是将计算机高速而精确的计算能力, 大容量存储和数据的能力与设讣者的综合分析,逻辑判断以及创造性思维结合起来,用以快速设计进程,缩短设计周期,提髙设计质量的技术。
控制系统数字仿真与CAD1和2习题答案

1-1什么是仿真?它所遵循的基本原则是什么?答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。
它所遵循的基本原则是相似原理。
1-2在系统分析与设计中仿真法与解析法有何区别?各有什么特点?答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,计算。
它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。
由于受到理论的不完善性以及对事物认识的不全面性等因素的影响,其应用往往有很大局限性。
仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法。
1-3数字仿真包括那几个要素?其关系如何?答: 通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与计算机。
由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题;将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验。
1-4为什么说模拟仿真较数字仿真精度低?其优点如何?。
答:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真。
(2)仿真速度极快,失真小,结果可信度高。
(3)能快速求解微分方程。
模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关。
(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真。
(5)易于和实物相连。
1-5什么是CAD技术?控制系统CAD可解决那些问题?答:CAD技术,即计算机辅助设计(Computer Aided Design),是将计算机高速而精确的计算能力,大容量存储和数据的能力与设计者的综合分析,逻辑判断以及创造性思维结合起来,用以快速设计进程,缩短设计周期,提高设计质量的技术。
Matlab与控制系统仿真部分习题答案
【4.2】程序:num=[5,0];den=conv([1,1],conv([1,2],[1,3])); [numc,denc]=cloop(num,den);[z,p,k]=tf2zp(numc,denc);[A,B,C,D]=tf2ss(numc,denc);g_zp=zpk(z,p,k)g_tf=tf(numc,denc)g_ss=ss(A,B,C,D)运行结果:Zero/pole/gain:5 s----------------------------------(s+0.4432) (s^2 + 5.557s + 13.54)Transfer function:5 s----------------------s^3 + 6 s^2 + 16 s + 6a =x1 x2 x3x1 -6 -16 -6x2 1 0 0x3 0 1 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 5 0d =u1y1 0【4.3】程序:A=[0 0 0 -1;1 0 0 -2;0 1 0 -3;0 0 1 -4]; B=[0;0;0;1];C=[1 0 0 0];g_ss=ss(A,B,C,D)[num,den]=ss2tf(A,B,C,D);g_tf=tf(num,den)[z,p,k]=ss2zp(A,B,C,D);g_zpk=zpk(z,p,k)运行结果:a =x1 x2 x3 x4x1 0 0 0 -1x2 1 0 0 -2x3 0 1 0 -3x4 0 0 1 -4b =u1x1 0x2 0x3 0x4 1c =x1 x2 x3 x4y1 1 0 0 0d =u1y1 0Continuous-time model.Transfer function:-3.109e-015 s^3 - s^2 - 3.331e-015 s - 4.441e-016 -------------------------------------------------s^4 + 4 s^3 + 3 s^2 + 2 s + 1Zero/pole/gain:- s^2----------------------------------------------(s+0.6724) (s+3.234) (s^2 + 0.0936s + 0.4599)【5.1】(1)程序num=[0,10];den=conv([1,0],[1,7,17]); [numc,denc]=cloop(num,den,-1); G=tf(numc,denc)[y,t]=step(G);plot(t,y,'b-')C=dcgain(G);n=1;while y(n)<0.1*Cn=n+1;endm=1;while y(m)<0.9*Cm=m+1;endrisetime=t(m)-t(n)[Y,k]=max(y); percentovershoot=100*(Y-C)/Ci=length(t);while(y(i)>0.98*C)&(y(i)<1.02*C) i=i-1;endsettlingtime=t(i)运行结果:Transfer function:10-----------------------s^3 + 7 s^2 + 17 s + 10risetime =2.7312percentovershoot =-0.4399settlingtime =5.1372图:0123456700.10.20.30.40.50.60.70.80.91(2)程序k=[10,100,1000];t=linspace(1,20,200);num=1;den=conv([1,0],[1,7,17]);for j=1:3;s1=tf(num*k(j),den);sys=feedback(s1,1)y(:,j)=step(sys,t);endplot(t,y(:,1),'r',t,y(:,2),'b',t,y(:,3),'g')gtext('k=10');gtext('k=100');gtext('k=1000') 运行结果:Transfer function:10-----------------------s^3 + 7 s^2 + 17 s + 10Transfer function:100------------------------s^3 + 7 s^2 + 17 s + 100Transfer function:1000-------------------------s^3 + 7 s^2 + 17 s + 1000图:024681012141618200.20.40.60.811.21.41.61.8图:02468101214161820-3-2-1123422【6.1】程序:(1)num1=[1,1];den1=conv([1,0,0],conv([1,2],[1,4]));sys1=tf(num1,den1)rlocus(sys1)运行结果:-12-10-8-6-4-2024-8-6-4-202468Root LocusReal Axis I m a g i n a r y A x i s(2)num2=[1,1];den2=conv([1,0],conv([1,-1],[1,4,16]));sys2=tf(num2,den2)rlocus(sys2)运行结果:-10-8-6-4-2024-8-6-4-202468Root LocusReal Axis I m a g i n a r y A x i s(3)num3=[1,8];den3=conv([1,0,0],conv([1,3],conv([1,5],conv([1,7],[1,15])))); sys3=tf(num3,den3)rlocus(sys3)运行结果:-30-25-20-15-10-5051015-20-15-10-505101520Root LocusReal Axis I m a g i n a r y A x i s【6.3】程序:num=[1,2];den=conv([1,0],conv([1,4],conv([1,8],[1,2,5])));sys=tf(num,den)rlocus(sys)[k,poles]=rlocfind(sys)运行结果:Transfer function:s + 2---------------------------------------s^5 + 14 s^4 + 61 s^3 + 124 s^2 + 160 sSelect a point in the graphics windowselected_point =0.0296 + 2.2826i k =135.8815poles =-7.3248-5.41040.0145 + 2.3021i0.0145 - 2.3021i -1.2939图:-20-15-10-5051015-15-10-551015Root LocusReal Axis I m a g i n a r y A x i s【7.3】程序(1)画波特图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)bode(sys)grid图(1)-150-100-50050100M a g n i t u d e (d B)10-210-1100101102103-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)程序(2)画奈奎斯特图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)nyquist(sys)grid图(2)-16-14-12-10-8-6-4-20-300-200-100100200300Nyquist DiagramReal Axis I m a g i n a r y A x i s程序(3)画零极点图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)pzmap(sys1)gird图(3)P ole-Zero MapReal Axis I m a g i n a r y A x i s -12-10-8-6-4-20-1.5-1-0.50.511.5程序(4)计算相角裕量和幅值裕量num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)[gm,pm,wcg,wcp]=margin(sys)运行结果Transfer function:50---------------------3 s^3 + 31 s^2 + 10 sTransfer function:50--------------------------3 s^3 + 31 s^2 + 10 s + 50gm =2.0667pm =7.5615wcg =1.8257wcp =1.2645程序(5)绘制阶跃响应曲线num=[50];den=conv([1,0],conv([1,10],[3,1])); sys=tf(num,den)sys1=feedback(sys,1)step(sys1)图(5)00.20.40.60.811.21.41.61.82Step ResponseTime (sec)A m p l i t u d e【7.4】程序如下:num=[300];den=conv([1,0,0],conv([0.2,1],[0.02,1]));sys=tf(num,den)margin(sys)grid波特图如下:-150-100-50050100M a g n i t u d e (d B )10-1100101102103-360-315-270-225-180P h a s e (d e g )Bode DiagramGm = Inf , P m = -78 deg (at 11 rad/sec)Frequency (rad/sec)【9.3】程序:A=[-2 2 -1;0 -2 0;1 -4 0];B=[0;0;1];C=[1,0,0];D=0;M=ctrb(A,B)m=rank(M)if m==3;disp('系统可控')elsedisp('系统不可控')endN=obsv(A,C)n=rank(N)if n==3;disp('系统可观')elsedisp('系统不可观') endsys=ss(A,B,C,D) [num,den]=ss2tf(A,B,C,D) sys1=tf(num,den)[z,p,k]=ss2zp(A,B,C,D)运行结果:M =0 -1 20 0 01 0 -1m =2系统不可控N =1 0 0-2 2 -13 -4 2n =2系统不可观a =x1 x2 x3x1 -2 2 -1x2 0 -2 0x3 1 -4 0b =u1x1 0x2 0x3 1c =x1 x2 x3y1 1 0 0d =u1y1 0 Continuous-time model.0 0 -1 -2den =1 4 5 2Transfer function:-s - 2---------------------s^3 + 4 s^2 + 5 s + 2z =-2p =-1-1-2k = -1【10.1】(1)程序:A=[0,1,0,0;0,5,0,0;0,0,-7,0;0,0,0,-8]; B=[0;1;0;1];C=[1,2,3,4];D=zeros(1,1);G_ss=ss(A,B,C,D)运行结果:a =x1 x2 x3 x4x1 0 1 0 0x2 0 5 0 0x3 0 0 -7 0x4 0 0 0 -8u1x1 0x2 1x3 0x4 1c =x1 x2 x3 x4y1 1 2 3 4d =u1y1 0(2):程序:[num1,den1]=ss2tf(A,B,C,D); p=roots(den1)i=0;for k=1:1:length(p)if real(p(k))>0i=i+1;endendif i>0disp('系统不稳定');elsedisp('系统稳定');end运行结果:p =5.0000-8.0000-7.0000系统不稳定(3)(4)程序:AA=[0,1,0;0,5,0;0,0,-8];BB=[0;1;1];P=[-1,-2,-8];K=acker(AA,BB,P);i=4;K(4)=0;Kpp=eig(A-B*K)sys1=tf(num1,den1);[y1,t]=step(sys1);plot(t,y1)hold onA_feedback=A-B*K;[num2,den2]=ss2tf(A_feedback,B,C,D); sys2=tf(num2,den2);[y2,t]=step(sys2);plot(t,y2,'r')gridgtext('反馈前')gtext('反馈后')运行结果:K =2 8 0 0pp =-8-2-1-7图形:01234560123456【13.1】程序:A=[0,1;0,0];B=[0;1];C=[1,0];D=zeros(1,1);G_ss=ss(A,B,C,D)M=ctrb(A,B);if rank(M)==2disp('系统完全能控'); elsedisp('系统不完全能控'); endS=[1,0];N=obsv(A,S);if rank(N)==2disp('(A,S)可观测'); elsedisp('(A,S)不可观测'); endR=1;Q=[1,0;0,0];[K,P,E]=Lqr(A,B,Q,R)A_new=A-B*K;G_new=ss(A_new,B,C,D);t=linspace(0,5,100)';y1=step(G_ss,t);y2=step(G_new,t);plot(t,y1,'r:',t,y2,'b-')gridgtext('反馈前')gtext('反馈后')运行结果:a =x1 x2x1 0 1x2 0 0b =u1x1 0x2 1c =x1 x2y1 1 0d =u1y1 0Continuous-time model. 系统完全能控(A,S)可观测K =1.0000 1.4142P =1.4142 1.00001.0000 1.4142E =-0.7071 + 0.7071i-0.7071 - 0.7071i图形:00.51 1.52 2.53 3.54 4.5502468101214。
《自动控制系统计算机仿真》习题参考答案
《自动控制系统计算机仿真》习题参考答案1-1 什么是仿真? 它的主要优点是什么?它所遵循的基本原则是什么?答:所谓仿真,就是使用其它相似的系统来模仿真实的需要研究的系统。
计算机仿真是指以数字计算机为主要工具,编写并且运行反映真实系统运行状况的程序。
对计算机输出的信息进行分析和研究,从而对实际系统运行状态和演化规律进行综合评估与预测。
它是非常重要的设计自动控制系统或者评价系统性能和功能的一种技术手段。
仿真的主要优点是:方便快捷、成本低廉、工作效率和计算精度都很高。
它所遵循的基本原则是相似性原理。
1-2 你认为计算机仿真的发展方向是什么?答:向模型更加准确的方向发展,向虚拟现实技术,以及高技术智能化、一体化方向发展。
向更加广阔的时空发展。
1-3 计算机数字仿真包括哪些要素?它们的关系如何?答:计算机仿真的三要素是:系统——研究的对象、模型——系统的抽象、计算机——仿真的工具和手段。
它们的关系是相互依存。
2-1 控制算法的步长应该如何选择?答:控制算法步长的选择应该恰当。
如果步长太小,就会增加迭代次数,增加计算量;如果步长太大,计算误差将显著增加,甚至造成计算结果失真。
2-2 通常控制系统的建模有哪几种方法?答:1)机理建模法;2)实验建模法;3)综合建模法。
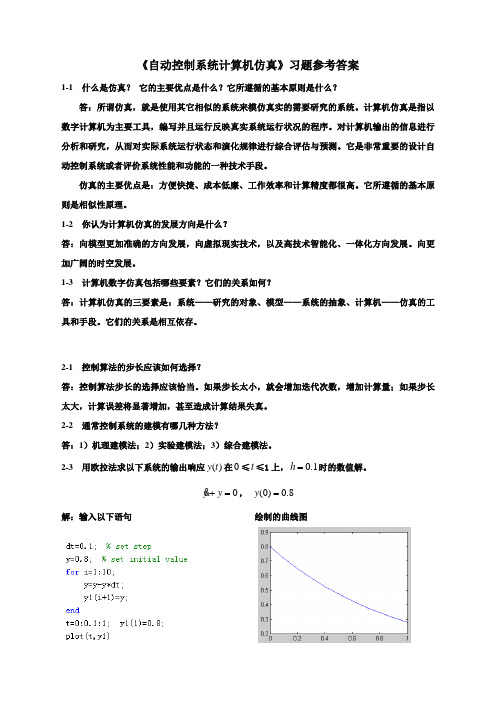
2-3 用欧拉法求以下系统的输出响应()y t 在0≤t ≤1上,0.1h =时的数值解。
0yy += , (0)0.8y = 解:输入以下语句 绘制的曲线图2-4 用二阶龙格-库塔法对2-3题求数值解,并且比较两种方法的结果。
解:输入以下语句绘制的曲线图经过比较两种方法的结果,发现它们几乎没有什么差别。
3-1 编写两个m文件,分别使用for和while循环语句计算20031kk=∑。
解:第1个m文件,第2个m文件运行结果都是3-2 求解以下线性代数方程:123102211313121xxx⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦解:输入语句计算结果3-3 已知矩阵013=121542⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦A,218=414332⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦B试分别求出A阵和B阵的秩、转置、行列式、逆矩阵以及特征值。
MATLAB语言与控制系统仿真_参考题答案_第3章

3.5 MATLAB 绘图实训3.5.1 实训目的1.学会MATLAB 绘图的基本知识;2.掌握MATLAB 子图绘制、图形注释、图形编辑等基本方法;3.学会通过MATLAB 绘图解决一些实际问题;4.练习二维、三维绘图的多种绘图方式,了解图形的修饰方法;5.学会制作简单的MATLAB 动画。
图3-46 炮弹发射示意图3.5.2 实训内容1. 炮弹发射问题〔1炮弹发射的基础知识炮弹以角度α射出的行程是时间的函数,可以分解为水平距离)(t x 和垂直距离)(t y 。
)cos()(0αtv t x = %水平方向的行程; 205.0)sin()(gt tv t y -=α %垂直方向的行程;其中,0v 是初速度;g 是重力加速度,为9.82m/s ;t 是时间。
〔2炮弹发射程序举例:分析以下程序以及图3-47各个图形的实际意义。
a=pi/4; v0=300; g=9.8;t=0:0.01:50; x=t*v0*cos<a>;y=t*v0*sin<a>-0.5*g*t.^2;subplot<221>;plot<t,x>;grid;title<‘时间-水平位移曲线'>; subplot<222>;plot<t,y>;grid;title<‘时间-垂直位移曲线'>; subplot<223>;plot<x,y>;grid;title<‘水平位移-垂直位移曲线'>; subplot<224>;plot<y,x>;grid;title<‘垂直位移-水平位移曲线'>; 图3-4745角发射曲线 〔3编程解决炮弹发射问题①假设在水平地面上以垂直于水平面的角度向上发射炮弹,即发射角90=α,假设初速度分别为[310,290,270]m/s,试绘制时间-垂直位移曲线,编程求取最高射程;绘图要求:◆ 标题设为"炮弹垂直发射问题";◆ 在图上通过添加文本的方式表明初速度; ◆ 在x 轴标注"时间";◆ 在y 轴上标注"垂直距离"; ◆ 添加网格线;◆ 将310m/s 的曲线改为线粗为2的红色实线; ◆ 将290m/s 的曲线改为线粗为3的绿色点划线;◆ 将270m/s 的曲线改为线粗为2的蓝色长点划线;a=pi/2; v1=310; g=9.8;t=0:0.01:50; x1=t*v1*cos<a>;y1=t*v1*sin<a>-0.5*g*t.^2;plot<t,y1>;grid; title<'炮弹垂直发射问题'>; xlabel<'时间'>; ylabel<'垂直距离'>; hold on; v2=290;x2=t*v2*cos<a>;y2=t*v2*sin<a>-0.5*g*t.^2; plot<t,y2>; v3=270;x3=t*v3*cos<a>;y3=t*v3*sin<a>-0.5*g*t.^2; plot<t,y3>;zgsc=[max<y1>; max<y2>; max<y3>] %三次发射的最高射程 运行结果如下: zgsc =1.0e+003 * 4.9031 4.29083.7194最高射程分别为:4903.1米,4290.8米,3719.4米。
(完整)系统建模与仿真习题答案(forstudents)
第一章习题1-1什么是仿真?它所遵循的基本原则是什么?答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。
它所遵循的基本原则是相似原理。
1-2在系统分析与设计中仿真法与解析法有何区别?各有什么特点?答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,计算。
它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。
由于受到理论的不完善性以及对事物认识的不全面性等因素的影响,其应用往往有很大局限性.仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法.1-3数字仿真包括那几个要素?其关系如何?答: 通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与计算机。
由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题;将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验.1—4为什么说模拟仿真较数字仿真精度低?其优点如何?.答:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真。
(2)仿真速度极快,失真小,结果可信度高。
(3)能快速求解微分方程.模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关.(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真.(5)易于和实物相连。
1-5什么是CAD技术?控制系统CAD可解决那些问题?答:CAD技术,即计算机辅助设计(Computer Aided Design),是将计算机高速而精确的计算能力,大容量存储和处理数据的能力与设计者的综合分析,逻辑判断以及创造性思维结合起来,用以加快设计进程,缩短设计周期,提高设计质量的技术.控制系统CAD可以解决以频域法为主要内容的经典控制理论和以时域法为主要内容的现代控制理论。
MATLAB系统仿真试题复习资料,有答案
PART I 教材复习要点第一章 MATLAB 入门测试1.11.MATLAB 的命令窗口的作用是什么?编辑/调试窗口?图象窗口? MATLAB 命令窗口是MATLAB 起动时第一个看到的窗口,用户可以在命令窗口提示符">>"后面输入命令,这些命令会被立即执行。
命令窗口也可以用来执行M 文件。
编辑/调试窗口是用来新建,修改或调试M 文件的。
图像窗口用来显示MATLAB 的图形输出。
2.列出几种不同的得到MATLAB 帮助的方法。
(1)在命令窗口中输入help <command_name>,本命令将会在命令窗口中显示关于些命令的有信息。
(2)在命令窗口中输入lookfor <keyword>,本命令将会在命令窗口中显示所有的在第一注释行中包含该关键字的命令和函数。
(3)通过在命令窗口输入helpwin 或helpdesk 启动帮助浏览器,或者是在启动板中选择"Help"。
帮助浏览器包含了基于超文本的MATLAB 所有特性的描述,HTML 或PDF 格式的在线手册,这是MATLAB 最全面的帮助资源。
3.什么是工作区?在同一工作区内,你如何决定它里面存储了什么?工作区是命令、M 文件或函数执行时被MATLAB 使用的变量或数组的收集器,所有命令都在命令窗口(所有的脚本文件也是从命令窗口执行)共享公共工作区,因此它们也共享所有变量,工作区的内容可以通过whos 命令来查看,或者通过工作区浏览器来图形化地查看。
4.你怎样清空MATLAB 工作区内的内容?要清除工作区的内容,只需在命令窗口中输入clear 或clear variables 即可。
第二章MATLAB 基础测试2.11.数组,矩阵,向量有什么区别?数组是在内存中被组织成行和列的数据集合,只有一个名称,数据要通过在数组名后面圆括号里加上表示数据所在行和列的数字来访问。
仿真面试题及答案
仿真面试题及答案一、单选题1. 在编程中,以下哪个选项是Java语言的关键字?A. JavaB. publicC. JavaScriptD. Python答案:B2. 数据库管理系统(DBMS)的主要功能是什么?A. 存储数据B. 管理数据C. 保护数据D. 所有以上选项答案:D二、多选题1. 以下哪些是软件开发生命周期(SDLC)的阶段?A. 需求分析B. 设计C. 实现D. 测试E. 维护答案:ABCDE2. 面向对象编程(OOP)的基本原则包括:A. 封装B. 继承C. 多态D. 抽象答案:ABCD三、判断题1. 在Web开发中,HTML负责页面的布局和结构。
答案:正确2. 所有的编程语言都支持面向对象编程。
答案:错误四、简答题1. 请简述软件开发中的敏捷方法论。
答案:敏捷方法论是一种以人为核心、迭代、增量的软件开发方法论。
它强调团队协作、客户反馈和快速响应变化,以实现持续交付高质量的软件产品。
2. 什么是API,它在软件开发中的作用是什么?答案:API(应用程序编程接口)是一组预定义的函数、协议和工具,用于构建软件应用。
API允许不同的软件组件之间进行交互,简化了开发过程,提高了开发效率。
五、案例分析题假设你是一名软件开发工程师,你的团队正在开发一个电子商务网站。
请描述你将如何使用敏捷开发方法来规划和执行项目。
答案:首先,我会与团队和客户进行会议,明确项目目标和需求。
然后,我们将需求分解成小的、可管理的任务,并将其排列在产品待办事项列表中。
接下来,我们会进行一系列的短周期迭代开发,每个迭代结束时都会进行评审和调整。
在整个过程中,我们会持续集成和测试,确保代码质量和功能实现。
通过定期的客户反馈,我们可以快速响应需求变化,确保最终产品满足客户的期望。
六、编程题编写一个Python函数,实现计算两个整数的和。
答案:```pythondef add_two_numbers(a, b):return a + b```七、开放性问题在当前的技术环境中,你认为哪些新兴技术将对软件开发产生重大影响?答案:一些可能对软件开发产生重大影响的新兴技术包括人工智能(AI)、机器学习(ML)、物联网(IoT)、区块链、量子计算和增强现实(AR)/虚拟现实(VR)。
物流系统仿真技术知到章节答案智慧树2023年山东交通学院
物流系统仿真技术知到章节测试答案智慧树2023年最新山东交通学院第一章测试1.物流系统的特征包括()。
参考答案:物流系统是一个“人机系统";物流系统是一个动态的复杂系统;物流系统是一个大跨度、多目标系统;物流系统是一个多层次的可分系统2.下列是系统绩效指标的有()。
参考答案:利用率;增值时间;通过时间;通过率3.数学和实验方法存在着一定的局限性,具体表现在()。
参考答案:系统无法恢复或者实验条件无法保证;传统数学、运筹学方法,存在着一定的局限性;系统可能还处在方案论证或设计阶段,在系统建成之前无法在新的系统上直接进行实验;在系统上进行的实验会造成巨大的破坏和损失4.如果没有数据可以使用,也无法估计出需要的数据,则不应该使用仿真。
()参考答案:对5.根据系统的物理特征,可以将系统划分为两大类,即工程系统和非工程系统。
()参考答案:对第二章测试1.离散事件仿真模型的三层次模型包括()。
参考答案:概念模型层;计算模型层;详细模型层2.实体流图法常用的图示符号()。
参考答案:圆角矩形框表示开始和结束;矩形框表示事件、状态、活动;箭头表示逻辑关系;菱形框表示判断3.离散事件系统要素包括()。
参考答案:实体,事件;仿真时钟,系统环境;属性,状态;活动,进程4.离散事件系统仿真时钟的推进步长是固定的,取决于系统的当前状态和事件发生的条件。
()参考答案:错5.活动周期图以临时实体在系统中的流动过程为主线,永久实体浓缩于表示状态和事件的图示符合中,队列作为一种特殊实体。
()参考答案:错第三章测试1.仿真软件的功能包括()。
参考答案:模型和数据的存储与检索;仿真实验的执行与控制;模型描述的规范及处理;仿真结果的分析与演示2.选择仿真软件时,需要考虑许多相关特性,下列属于建模特性的是()。
参考答案:条件路由;建模简洁性;数据输入分析能力;建模视角3.AutoMod 软件的功能与特点包括()。
参考答案:AutoMod提供比例真实的3D虚拟现实动画,使仿真模型易于理解;AutoMod自动输出统计报告与图表;AutoMod提供给用户一套物料搬运系统模板;AutoMod是基于进程交互仿真策略的软件4.GPSS是一个高度结构化的进程交互仿真语言,由IBM公司推出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统仿真
1、连续数据和离散数据的直方图分别与理论分布的概率密度函数、概率质量函数相对应。
2、Flexsim建模过程中,如何建立和取消两个实体之间的输入和输出端口
按住键盘“A”键,点击鼠标左键可以在两个实体之间连接一条线。
按住键盘“Q”键,点击鼠标左键可以在两个实体之间删除一条线按住键盘“S”“W”键同理。
AQ用在固定元件与固定元件之间,SW用在固定元件与可移动元件之间。
3、仿真中事件、活动和实体的定义。
实体:组成系统的物理单元。
事件:引起系统状态变化的行为,即系统的动态过程是靠事件来驱动的。
活动:两个相邻发生的事件之间的过程。
4、“仿真钟”的推进和推进速度的特点。
仿真钟的推进呈现跳跃性推进速度具有随机性。
?
5、具有无记忆性的连续分布和离散分布各是什么。
指数分布、几何分布。
6、三角分布各参数的求法。
高度=2/(c-a)
7、在研究排队系统时,决策者通常要在服务台利用率和顾客满意程度之间做出权衡。
8、舍选技术的效率严重依赖于将拒绝数最小化的能力。
9、模型的假设一般分结构假设和数据假设。
10、能够快速显示出模型的合理性的两组统计量是当前容量和总数。
11、预测区间和置信区间各是什么的度量。
预测区间是风险的度量,而置信区间是误差的度量。
12、单、多服务台队列达到稳定的条件是什么。
13、对于绝大多数队列,可以通过什么方式来缩短队列长度。
通过减小服务台利用率或服务时间波动的方式来缩短队列长度。
15、当系统容量有限时,“到达速率”是指什么,“有效到达速率”是指什么?
当系统容量有限时,“到达速率”(单位时间的到达数目)和“有效到达速率”(单位时间内到达并进入系统的数目)
16、仿真与建模可以用于解答现实世界系统各种各样“如果……就会……”问题。
17、输出分析的目的是什么?目的是预测一个系统的性能或比较两个或多个备选系统设计的性能。
18、本课程所讲述的仿真模型是属于什么类型的数学模型。
本课程所讲述的仿真模型是系统的一类特殊数学模型。
20、队列长度的波动主要是由哪些因素造成的?到达间隔时间和服务时间的变化造成了队列长度的波动
21、输入建模时,所选择的分组区间的数量与样本大小的关系是什么?所选择的分组区间的数量近似等于样本大小的平方根
22、各种分布所对应的不同情况是什么?
二项分布:对n次试验的成功次数进行建模,此时试验是独立的,具有共同的成功概率p。
负二项分布(包括几何分布):对取得k次成功所需要的试验次数进行建模。
泊松分布:对在固定长度时间或固定大小空间内发生的独立事件的次数进行建模。
正态分布:对一个可以看成是许多子过程之和的过程的分布进行建模。
对数正态分布:对一个可以看成是许多子过程之积的过程的分布进行建模。
指数分布:对独立事件之间的时间进行建模;或对无记忆的过程时间进行建模。
伽马分布:一个用于为非负随机变量建模的极其灵活的分布。
β分布:一个用于为有界随机变量建模的极其灵活的分布。
爱尔朗分布:对一个可以看成是几个指数分布过程之和的过程进行建模。
韦布尔分布:对部件的故障时间进行建模。
离散或连续均匀分布:对完全不确定性建模;所有的结果是等可能性的。
三角分布:只知道一个过程的分布的最小值(最有可能)和最大值时,用它来建模。
经验分布:在没有合适的理论分布的情况下使用。
23、进行输出分析的原因在于?当用随机数发生器产生输入变量时,仿真的输出数据也呈现出随机性。
24、在减小初始化条件的影响时,没有删除的数据至少应该是删除数据的多少倍,重复运行的次数应该允许多达多少次?
在减小初始化条件的影响时,[0,T0)内的数据将被删除,粗略地讲,没有删除的数据至少应该是删除数据的10倍。
TE至少应该是10T0 给定这样的运行长度:重复运行的次数应该允许多达25次左右。
25、生产系统定义生产系统是一个为了生产某一种产品或服务,综合生产工艺、生产计划、质量控制、人员调度、设备维护、物料控制等各种技术为一体的复杂系统。
26、系统仿真定义系统模型是对实际系统进行简化和抽象、能够揭示系统元素之间关系和系统特征的相关元素实体。
27、排队标记A/B/c/N/K中各字母所代表的含义。
A——到达间隔时间的分布 B——服务时间的分布 c——并行服务台的个数
N——系统容量 K——拟到达总体的大小
28、仿真可以达到的目的有哪些。
⑴仿真使得对复杂系统内部的相互作用和复杂系统的子系统内部的相互作用的研究和实验成为可能。
⑵可以仿真信息、组织及环境的变更,以观察这些改变对模型行为的影响。
⑶对被研究系统的改进提出建议。
⑷可使我们深入了解哪些变量是最重要的,以及变量间是如何相互作用的。
⑸可作为教学设备来增强解析求解方法的能力。
⑹可用于在新设计或策略实施前进行实验,为可能发生的事情做好准备。
⑺仿真可以用于验证解析解。
⑻对机器的不同能力进行仿真有助于确定其需求。
⑼设计用于训练的仿真模型使得学习成为可能,无需费用及现场指导。
⑽动画显示仿真运行中的系统,从而使计划具有可视性。
⑾现代系统非常复杂,只能通过仿真来处理其内部的相互作用。
19、泊松到达过程所需满足的条件是什么?6.5
无限总体模型:用An表示第n-1和第n名顾客的到达间隔时间。
情况一:泊松到达过程,An服从均值为1/λ时间单位的指数分布。
情况二:到达过程是确定的,An为常数。
情况三:队列中顾客始终不少于一个。
有限总体模型:
如顾客当前不在排队系统中,且是潜在拟到达总体的一员,则将其定义为“未定的”;若顾客进入队列或正在接受服务,则其就变为“非未定的”。
运行时间:顾客离开系统至下一次进入系统之间的时间长度。
29、生产系统运用仿真技术的原因。
生产系统的运行受到市场需求、原料供应、生产环境、生产状态等多方面因素的制约,且这些因素具有很强的不确定性,使得不可能用一个可解析的、简单的数学函数或数学模型来表示真实生产系统的运行状态。
生产系统的求解难以运用经典的系统求解方法来解决,而计算机仿真技术为生产系统的预测、求解带来了广泛的发展空间。
30、增加仿真模型运行长度的优、缺点。
增加运行长度的优点:点估计中任何残留的偏差将由于额外删除运行初始阶段的数据而进一步减小。
缺点:必须存储模型在T0+TE时刻的状态,以继续运行,有时将消耗大量的资源。
31、仿真表格的计算。
32、科尔莫戈罗夫·斯米尔诺夫检验的步骤。
33、混合线性同余法的计算。