8-1试求下列函数的z变换
习题例题离散控制系统
各章重点主要内容习题/例题精选重要公式及推导学习讨论教学大纲 -> 习题/例题精选 -> 第七章习题/例题第八章例题8-1 求单位阶跃函数1(t)的z变换....8-2 求下列函数的z变换....8-3 求下列函数的z变换....8-4 求下列函数的z变换....8-5 设已知...8-6 试求当k=0,1,2,3,4,时的f(kT)值。
....8-7 试用留数法求f(kT)....8-8 求图7-7所示系统的脉冲传递函数....8-9 求图7-8所示系统的脉冲传递函数....8-10 试求两种连接形式的脉冲传递函数....8-11 求系统的脉冲传递函数....8-12 求系统的闭环脉冲传递函数....8-13 求系统的闭环脉冲传递函数....8-14 程序ex714.m....8-15 求系统的的单位脉冲响应....8-16 判断闭环离散系统的稳定性....8-17 用变换代入....8-18 画出其频率特性,并以此对系统进行分析....求单位阶跃函数1(t)的z变换注意:只要函数z变换的无穷级数F(z),在z平面某个区域内敛,则在应用时,就不需要指出F(z)的收敛域。
回例题目录回第八章相应例8-2求下列函数的z变换。
(t<0)(t≥0)解:回例题目录回第八章相应求下列函数的z变换(t<0)(t≥0)解:回例题目录回第八章相应例8-4求下列函数的z变换:解: 先将F(s)展开成部分分式。
其中,[或1(t)]相应的z变换为 ,而[即e-t] 相应的z变换为则:回例题目录回第八章相应设已知试求f(kT)解:之部分分式分解:即:查表得:故得:即:f(0)=0, f(T)=5, f(2T)=15, f(3T)=35,……回例题目录回第八章相应例8-6设已知F(z)为试求当k=0,1,2,3,4,时的f(kT)值。
解:F(z)可以写成:长除得:对照z变换的定义的方法,得:f(0)=0,f(T)=5,f(2T)=15,f(3T)=35回例题目录回第八章相应例8-7设,试用留数法求f(kT)。
第八章-Z变换与离散系统z域分析

第八章:Z 变换§8.1 定义、收敛域(《信号与系统》第二版(郑君里)8.1,8.2,8.3)定义(Z 变换): ♦序列()x n 的双边Z 变换:()(){}()nn X z x n x n z+∞-=-∞∑Z(8-1)♦序列()x n 的单边Z 变换:()(){}()0n n X z x n x n z +∞-=∑Z(8-2)注:1)双边:()()()()10nnn n n n X z x n zx n zx n z +∞-∞+∞---=-∞=-===+∑∑∑(8-3)为Laurent 级数,其中,()1nn x n z-∞-=-∑是Laurent 级数的正则部,()0nn x n z+∞-=∑是主部。
2)z 是复平面上的一点图8-13)对因果序列:单边Z 变换=双边Z 变换。
♦定义(逆Z 变换):对双边Z 变换()()nn X z x n z+∞-=-∞=∑()1C1d 2j m z X z z π-⎰(1C 12j m n z x π+∞-=-∞⎡=⎢⎣∑⎰ ()C 12j m n x n z π+∞=-∞⎡=⎢⎣∑⎰由Cauchy 定理,有1C d 0,2j m n z z m nπ--=⎨≠⎩⎰ (8-4)其中,C 为包围原点的闭曲线,()()1C1d 2j m x m z X z z π-∴=⎰上式= 定义:()()(){}11C1d 2j n x n z X z z X z π--==⎰Z(8-5)注:(8-4)的求解:j z re θ=,j d j d z r e θθ=,则有()()21110C 2011d 2j 2j 1102j m n m n m n j j m n m n z z r e rje d m n r e d m nπθθπθθππθπ--------==⎧==⎨≠⎩⎰⎰⎰,,图8-2 柯西定理证明示意图收敛域: ♦定义(收敛域):对有界()x n ,使()()nn X z x n z+∞-=-∞=<∞∑一致的z 的集合。
(仅供参考)自动控制原理第七章习题答案
第七章 线性离散系统的分析与校正7-1 试根据定义∑∞=-*=0)()(n nTs e nT e s E确定下列函数的)(s E *和闭合形式的)(z E :⑴ t t e ωsin )(=;⑵ ))()((1)(c s b s a s s E +++=,b a ≠,c a ≠,c b ≠。
解:Ts e z =;⑴ )()sin()(0z E enT s E n nTs==∑∞=-*ω;1)cos(2)sin(21}{21)(20+-=⎥⎦⎤⎢⎣⎡---=-=-∞=--∑z T z z T e z z e z z j e e e j z E T j T j n nTsjwnT jwnT ωωωω。
⑵ ))()((1))()((1))()((1)(c s c b c a b s b c b a a s a c a b s E +--++--++--=; ∑∑∑∞=--∞=--∞=--*--+--+--=000))((1))((1))((1)(n nTs cnT n nTsbnT n nTs anT e e c b c a e e b c b a e e a c a b s E ; ))()(())()(())()(()(cTbT aT e z c b c a ze z b c b a z e z a c a b z z E ------+---+---=; 记))()((c b c a b a ---=∆,∆-=b a k 1,∆-=ca k 2,∆-=cb k 3;))()(()()()()(3)(2)(12321cTbT aT T c b T c a T b a aT bT cT e z e z e z ze k e k e k z e k e k e k z E ---+-+-+-------+-++-=。
7-2 采样周期为T ,试求下列函数的Z 变换:⑴ n a nT e =)(; ⑵ t e t t e 32)(-=;⑶ 3!31)(t t e =; ⑷ 21)(ss s E +=;⑸ )1(1)(2+-=-s s e s E sT 。
计算机控制系统作业参考答案
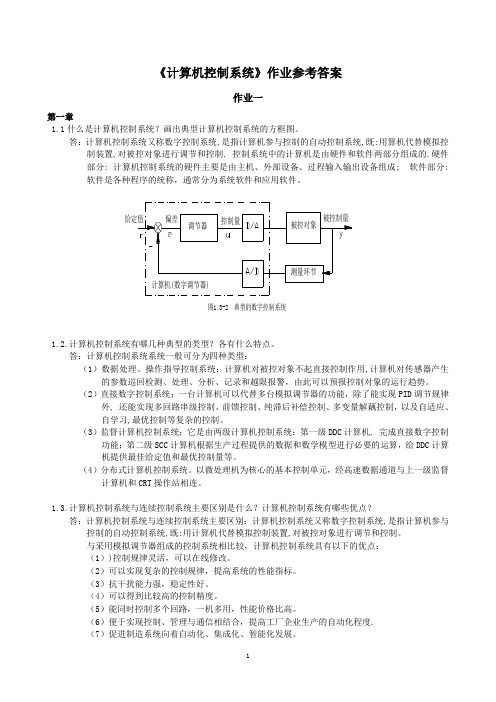
《计算机控制系统》作业参考答案作业一第一章1.1什么是计算机控制系统?画出典型计算机控制系统的方框图。
答:计算机控制系统又称数字控制系统,是指计算机参与控制的自动控制系统,既:用算机代替模拟控制装置,对被控对象进行调节和控制. 控制系统中的计算机是由硬件和软件两部分组成的.硬件部分: 计算机控制系统的硬件主要是由主机、外部设备、过程输入输出设备组成; 软件部分: 软件是各种程序的统称,通常分为系统软件和应用软件。
图1.3-2 典型的数字控制系统1.2.计算机控制系统有哪几种典型的类型?各有什么特点。
答:计算机控制系统系统一般可分为四种类型:(1)数据处理、操作指导控制系统;计算机对被控对象不起直接控制作用,计算机对传感器产生的参数巡回检测、处理、分析、记录和越限报警,由此可以预报控制对象的运行趋势。
(2)直接数字控制系统;一台计算机可以代替多台模拟调节器的功能,除了能实现PID调节规律外, 还能实现多回路串级控制、前馈控制、纯滞后补偿控制、多变量解藕控制,以及自适应、自学习,最优控制等复杂的控制。
(3)监督计算机控制系统;它是由两级计算机控制系统:第一级DDC计算机, 完成直接数字控制功能;第二级SCC计算机根据生产过程提供的数据和数学模型进行必要的运算,给DDC计算机提供最佳给定值和最优控制量等。
(4)分布式计算机控制系统。
以微处理机为核心的基本控制单元,经高速数据通道与上一级监督计算机和CRT操作站相连。
1.3.计算机控制系统与连续控制系统主要区别是什么?计算机控制系统有哪些优点?答:计算机控制系统与连续控制系统主要区别:计算机控制系统又称数字控制系统,是指计算机参与控制的自动控制系统,既:用计算机代替模拟控制装置,对被控对象进行调节和控制。
与采用模拟调节器组成的控制系统相比较,计算机控制系统具有以下的优点:(1))控制规律灵活,可以在线修改。
(2)可以实现复杂的控制规律,提高系统的性能指标。
数字信号处理期末试卷(含答案)
________ 次复乘法,运算效率为__
_。
6、FFT利用 来减少运算量。
7、数字信号处理的三种基本运算是: 。
8、FIR滤波器的单位取样响应
是圆周偶对称的,N=6,
,其幅度特性有什么特性? ,相位有何特 性? 。 9、数字滤波网络系统函数为
。
4、 已知
,
的反变换
。 3、
,变换区间
,则
。 4、
,
,
是
和
的8点循环卷积,则
。
5、用来计算N=16点DFT直接计算需要_
2FFT算法,需要
次复乘法
6、基2DIF-FFT 算法的特点是
7、有限脉冲响应系统的基本网络结构有
8、线性相位FIR滤波器的零点分布特点是
9、IIR系统的系统函数为
次复加法,采用基
转换为
时应使s平面的左半平面映射到z平面的
。
A.单位圆内 B.单位圆外 C.单位圆上 D.单位圆与实轴的交
点
6、 分析问答题(每题5分,共2题)
3、 某线性时不变因果稳定系统单位取样响应为
(长度为N),则该系统的频率特性、复频域特性、离散频率特性分 别怎样表示,三者之间是什么关系? 4、 用
对连续信号进行谱分析时,主要关心哪两个问题以及怎样解决二者的 矛盾?
十一、(7分)信号 包含一个原始信号 和两个回波信号: 求一个能从 恢复 的可实现的滤波器.
附录:
矩形窗(rectangular window) 汉宁窗(Hann window) 汉明窗(Hamming window) 布莱克曼窗(Blackman window)
表1 一些常用的窗函数
表2 一些常用窗函数的特性
数字信号处理期末试卷(共七套)

第一套试卷学号 姓名 成绩一、 选择题(每题3分,共5题) 1、)63()(π-=n j en x ,该序列是 。
A.非周期序列B.周期6π=N C.周期π6=N D. 周期π2=N2、序列)1()(---=n u a n x n ,则)(Z X 的收敛域为 。
A.a Z <B.a Z ≤C.a Z >D.a Z ≥3、若一线性移不变系统当输入为x(n)=δ(n)时输出为y(n)=R 3(n),则当输入为u(n)-u(n -2)时输出为 。
A.R 3(n)B.R 2(n)C.R 3(n)+R 3(n -1)D.R 2(n)+R 2(n -1) 4、)()(101n R n x =,)()(72n R n x =,用DFT 计算二者的线性卷积,为使计算量尽可能的少,应使DFT 的长度N 满足 。
A.16>NB.16=NC.16<ND.16≠N5.已知序列Z 变换的收敛域为|z |<1,则该序列为 。
A.有限长序列 B.右边序列 C.左边序列 D.双边序列 二、填空题(每题3分,共5题)1、离散时间信号,其时间为 的信号,幅度是 。
2、线性移不变系统的性质有__ ____、___ ___和分配律。
3、要想抽样后能够不失真的还原出原信号,则抽样频率必须 ,这就是奈奎斯特抽样定理。
4、序列R 4(n)的Z 变换为_____ _,其收敛域为____ __。
5、对两序列x(n)和y(n),其线性相关定义为 。
三、10)(-≤≥⎩⎨⎧-=n n ba n x nn求该序列的Z 变换、收敛域、零点和极点。
(10分)四、求()()112111)(----=z z Z X ,21<<z 的反变换。
(8分)五、已知两个有限长序列如下图所示,要求用作图法求。
(10分)六、已知有限序列的长度为8,试画出按频率抽选的基-2 FFT算法的蝶形运算流图,输入为顺序。
(10分)七、问答题:数字滤波器的功能是什么?它需要那几种基本的运算单元?写出数字滤波器的设计步骤。
郑君里《信号与系统》(第3版)笔记和课后习题(含考研真题)详解-第8章 z变换、离散时间系统的z域分

(7)
X
z
1 2
n
u
n
u
n
10
z
n
9 n0
1 2
n
z
n
9 n0
1 2z
n
1
1 2z
1 1
10
z 0
2z
X(z)的零、极点分布图如图 8-2-1(g)所示。
(8)
8 / 75
圣才电子书
十万种考研考证电子书、题库视频学习平
X
z
n台
1 2
圣才电子书
十万种考研考证电子书、题库视频学习平
台
第 8 章 z 变换、离散时间系统的 z 域分析
8.1 复习笔记
从本章开始陆续讨论 Z 变换的定义、性质以及它与拉氏变换、傅氏变换的联系。在此 基础上研究离散时间系统的 z 域分析,给出离散系统的系统函数与频率响应的概念。通过 本章,读者应掌握对于离散时间信号与系统的研究,是先介绍 z 变换,然后引出序列的傅 里叶变换以及离散傅里叶变换(第九章)。
4 / 75
圣才电子书
十万种考研考证电子书、题库视频学习平
台
于实轴的直线映射到 z 平面是负实轴;
(3)在 s 平面上沿虚轴移动对应于 z 平面上沿单位圆周期性旋转,每平移 ωs,则沿
单位圆转一圈。
2.z 变换与拉氏变换表达式
Z
x nT X z zesT X s Z
n
u
n
1 3
n
u
n
z
n
n
(3)
X
z
n
1 3
n
u
n
z
n
n0
《计算机控制技术》教材习题解答1.

《计算机控制技术》习题解答第一章1.1什么是计算机控制系统?计算机控制系统由哪几部分组成?答:计算机控制系统就是利用计算机(通常称为工业控制计算机,简称工业控制机)来实现生产过程自动控制的系统。
计算机控制系统的组成:计算机控制系统由计算机(工业控制机)和生产过程两大部分组成。
1.2、微型计算机控制系统的特点是什么?微机控制系统与常规的自动控制系统相比,具有如下特点:a.控制规律灵活多样,改动方便b.控制精度高,抑制扰动能力强,能实现最优控制c.能够实现数据统计和工况显示,控制效率高d.控制与管理一体化,进一步提高自动化程度1.3 计算机控制系统结构有哪些分类?指出这些分类的结构特点和主要应用场合。
答:(1)操作指导控制系统优点:结构简单,控制灵活,安全。
缺点:由人工操作,速度受到限制,不能控制多个对象。
(2)直接数字控制系统(DDS)优点:实时性好,可靠性高,适应性强。
(3)监督控制系统(SCC)优点:生产过程始终处于最优工况。
(4)分散控制系统(DCS)优点:分散控制、集中操作、分级管理、分而自治和综合协调。
(5)现场总线控制系统(FCS)优点:与DCS相比,降低了成本,提高了可靠性。
国际标准统一后,可实现真正的开放式互联系统结构。
1.4.计算机控制系统的控制过程是怎样的?计算机控制系统的控制过程可归纳为以下三个步骤:(1)实时数据采集:对被控量的瞬时值进行检测,并输入给计算机。
(2)实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程。
(3)实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务。
1.5.实时、在线方式和离线方式的含义是什么?答:所谓实时,是指信号的输入、计算和输出都要在一定的时间范围内完成,亦即计算机对输入信息,以足够快的速度进行控制,超出了这个时间,就失去了控制的时机,控制也就失去了意义。
在计算机控制系统中,生产过程和计算机直接连接,并受计算机控制的方式称为在线方式或联机方式;生产过程不和计算机相连,且不受计算机控制,而是靠人进行联系并做相应操作的方式称为离线方式或脱机方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
− 10 E ( z) − 10 10 = = + z ( z − 1)( z − 2) z − 1 z − 2 − 10 z 10 z E( z) = + ( z − 1) ( z − 2) e(nT ) = −10 × 1 + 10 × 2 n = 10(2 n − 1)
② 幂级数法:用长除法可得
5 ⎤ 10 z (e − 2T − e −5T ) ⎡ 2 G( z) = Z ⎢ ⋅ = ⋅ − 2T −5T ⎣ s + 2 s + 5⎥ ⎦ 3 ( z − e )( z − e )
8-6 试由以下差分方程确定脉冲传递函数。
c(n + 2) − (1 + e −0.5T ) ⋅ c(n + 1) + e −0.5T c(n) = (1 − e −0.5T ) ⋅ r (n + 1)
解 对上式实行 z 变换,并设所有初始条件为 0 得
z 2 C ( z ) − (1 + e −0.5T ) zC ( z ) + e −0.5T C ( z ) = (1 − e −0.5T ) z ⋅ R( z )
2
(2) 对差分方程两端取 z 变换,整理得
C( z) =
1 z z ⋅ = 2 2 ( z + 1) ( z − 1) 2 z + 2 z + 1 ( z − 1)
2
Re s C ( z ) ⋅ z n −1
[
]
z →1
=
⎤ 1 d ⎡ z ⋅ z n −1 ⎥ lim ⎢ 2 1! z →1 dz ⎣ ( z + 1) ⎦ d ⎡ zn ⎤ nz n −1 ( z + 1) − 2 − 2( z + 1) −3 ⋅ z n ⎥ = lim ⎢ z →1 dz ( z + 1) 2 z →1 ⎣ ⎦
8-1
试求下列函数的z变换
(1)
(2)
e(t ) = a
t T
(3)
( 4)
解
e( t ) = t 2 e −3t s +1 E ( s) = 2 s
E (s) =
s+3 s ( s + 1)( s + 2)
(1) E ( z ) = (2) Z
2
∑a
n =0
2
∞பைடு நூலகம்
n
z −n =
z 1 = −1 z−a 1 − az
8-2 试分别用部分分式法、幂级数法和反演积分法求下列函数的z反变换。
10 z ( z − 1)( z − 2 ) − 3 + z −1 (2) E( z) = 1 − 2 z −1 + z − 2 10 z 解 (1) E ( z ) = ( z − 1)( z − 2) (1) E ( z) =
= lim
[
]
= n 2 − 2 − 2 ⋅ 2 −3 = Re s C ( z ) ⋅ z n −1
n −1 4
[
]
z →1
=
⎤ 1 d ⎡ z lim ⎢ ⋅ z n −1 ⎥ 2 z 1 → − 1! dz ⎣ ( z − 1) ⎦ d ⎡ zn ⎤ nz n −1 ( z − 1) − 2 − 2( z − 1) −3 ⋅ z n ⎢ ⎥ = zlim z → −1 dz ( z − 1) 2 → −1 ⎣ ⎦
E( z) =
10 z 10 z = 2 = 10 z −1 + 30 z −2 + 70 z −3 + Λ ( z − 1)( z − 2) z − 3z + 2
e* (t ) = 10δ (t − T ) + 30δ (t − 2T ) + 70δ (t − 3T ) + Λ
③ 反演积分法
10 z n = −10 z →1 z − 2 10 z n Re s[E ( z ) ⋅ z n −1 ]z →2 = lim = 10 × 2 n z →2 z − 1 e(nT ) = −10 × 1 + 10 × 2 n = 10(2 n − 1) e * (t ) = ∑10(2 n − 1)δ (t − nT )
( 4)
解
c( k + 2) + 5c ( k + 1) + 6c (k ) = cos( kπ / 2)
c (0) = c(1) = 0
(1) 令 t = −T ,代入原方程可得: c (T ) = 0 。对差分方程两端取 z 变换,整理得
C ( z) =
1 1 z R( z ) = ⋅ ( z − 2)( z − 4) z − 1 z − 6z + 8 C ( z) 1 1 1 1 1 1 = ⋅ − ⋅ + ⋅ z 3 z −1 2 z − 2 6 z − 4 z 1 z 1 1 z C ( z) = ⋅ − ⋅ + ⋅ 3 z −1 2 z − 2 6 z − 4 1 1 1 c(nT ) = × 1n − × 2 n + × 4 n 3 2 6
c(nT ) =
π π⎤ −2 3 1 ⎡ ⋅ (−2) n + ⋅ (−3) n + ⎢cos n − sin n ⎥ 5 10 10 ⎣ 2 2⎦
π π⎤ 1 ⎡1 ⎤ 1 ⎡ = (−1) n +1 ⎢ ⋅ 2 n +1 − ⋅ 3 n +1 ⎥ + ⎢cos n − sin n ⎥ 10 2 2⎦ ⎣5 ⎦ 10 ⎣
3 3 2
对差分方程两端取 z 变换得
+ 11[zC ( z ) − zc(0)] + 6C ( z ) = 0
代入初条件整理得
( z 3 + 6 z 2 + 11z + 6) ⋅ C ( z ) = z 3 + 7 z 2 + 17 z C ( z) = z 3 + 7 z 2 + 17 z z 3 + 6 z 2 + 11z + 6 C ( z ) 11 1 1 5 1 = ⋅ −7⋅ + ⋅ z 2 z +1 z+2 2 2+3 11 5 5 ⎡11 ⎤ c(n) = (−1) n − 7(−2) n + (−3) n = (−1) n ⎢ − 7 ⋅ 2 n + ⋅ 3 n ⎥ 2 2 2 ⎣2 ⎦
z ( z − cos ) 2 z 2 − 2 z cos
(4) 由原方程可得
π
( z 2 + 5 z + 6) ⋅ C ( z ) =
π
=
2
+1
z2 z2 +1
C ( z) =
z2 z2 = ( z 2 + 5 z + 6)( z 2 + 1) ( z + 2)( z + 3)( z 2 + 1) C ( z) z −2 1 3 1 1 z −1 = = ⋅ + ⋅ + ⋅ 2 2 z ( z + 2)( z + 3)( z + 1) 5 z + 2 10 z + 3 10 z + 1
c(k + 2) = 4c(k + 1) − c(k ) c(0) = 0 , c(1) = 1 c(2) = 4 ×1 − 0 = 4 c(3) = 4 × 4 − 1 = 15 c(4) = 4 ×15 − 4 = 56
8-5 试用z变换法求解下列差分方程:
(1)
(2)
c( k + 2) − 6c(k + 1) + 8c(k ) = r ( k ) r ( k ) = 1( k ) , c( k ) = 0
n =0
8-3 试确定下列函数的终值
(1)
E ( z) =
Tz −1 (1 − z −1 ) 2
(2)
解
E( z) =
0.792 z 2 ( z − 1)( z 2 − 0.416 z + 0.208)
−1 z →1
(1) e ss = lim(1 − z )
Tz −1 =∞ (1 − z −1 ) 2
根据定义有
C ( z) z (1 − e −0.5 / T ) G( z) = = R ( z ) z 2 − (1 + e −0.5T ) z + e −0.5T
8-7 设开环离散系统分别如图8-1(a),(b),(c)所示,试求开环脉冲传递函数 G ( z ) 。
解
(a)Z⎢
2z ⎡ 2 ⎤ = − 2T ⎥ ⎣s + 2⎦ z − e 5z ⎡ 5 ⎤ Z⎢ = − 5T ⎥ ⎣ s + 5⎦ z − e 10 z 2 ⎡ 2 ⎤ ⎡ 5 ⎤ G( z) = Z ⎢ ⋅ Z = − 2T −5T ⎣s + 2⎥ ⎦ ⎢ ⎣ s + 5⎥ ⎦ ( z − e )( z − e ) 5 ⎤ 10 1 ⎤ 10 z (e −2T − e −5T ) ⎡ 2 ⎡10 1 Z = ⋅ ⋅ = ⋅ − ⋅ (b ) Z⎢ − 2T −5T ⎢ ⎣ s + 2 s + 5⎥ ⎦ ⎣ 3 s + 2 3 s + 5⎥ ⎦ 3 ( z − e )( z − e )
n =0 ∞
Re s[E ( z ) ⋅ z n −1 ]z →1 = lim
z (−3z + 1) z (−3z + 1) − 3 + z −1 = = 2 (2) E ( z ) = −2 1 − 2z + z z − 2z + 1 ( z − 1) 2