adams学习心得
adams心得体会

adams心得体会Adam's 心得体会随着时代的发展和社会的进步,人们对于事物的追求也日益多样化。
而我作为一个普通人,通过自己的学习和生活经验,对于心理学以及人类行为有了更深刻的认识和理解。
今天,我想和大家分享一下我在心理学领域的一些心得体会。
首先,我认为心理学的学习能够帮助我们更好地了解人类的行为和思维模式。
通过学习心理学的知识,我们可以对人类行为背后的原因有更深入的了解。
我们能够理解为什么人们常常会有一些特定的反应或情绪,进而能够更好地应对和解决各种问题。
其次,心理学的学习可以帮助我们更好地理解自己和他人。
通过对心理学的学习,我们可以更好地认识和理解自己的个性特点、情绪变化以及思维方式。
这不仅能够帮助我们更好地应对自己的情绪和压力,而且还能够增强我们与他人的沟通和理解能力。
在与他人的交往中,我们能够更加敏锐地察觉到他们的情绪变化、需求和意图,从而能够更好地与他人相处。
除此之外,心理学的学习还能够帮助我们提高自己的心理素质。
学习心理学可以使我们更加深入地了解人类的心理发展、人际关系等方面的知识。
我们能够学到如何在困难和挫折面前保持积极的心态,如何提高自己的学习和工作效率,如何有效地管理时间和管理压力等等。
这些都是在现代社会中非常重要的技能和素质。
在我的学习过程中,我也发现了一些难点和挑战。
其中一个难点是心理学的理论非常多而复杂,需要大量的阅读和学习。
另外一个难点是心理学的应用需要实践和经验的积累。
在实际操作中,我们需要更多地与他人交流和互动,才能够更好地应用和理解心理学的知识。
尽管心理学的学习存在一些挑战,但我认为它对于我们的发展和成长是非常有益的。
通过学习心理学,我们能够更好地了解人类的行为和思维方式,从而提高我们的自我认识和人际交往能力。
同时,心理学的学习也能够帮助我们更好地应对压力和困难,提高自己的心理素质。
总的来说,通过学习心理学,我对人类行为和思维方式有了更深入的了解。
这不仅能够帮助我更好地应对自己的情绪和压力,而且还能够提高我与他人的沟通和理解能力。
adams心得体会
adams心得体会在工作中的成长与发展是每个人都希望实现的目标,无论是在职场中的哪个阶段,都需要不断总结和反思,以便不断提升自己的能力和素质。
在我个人的职业生涯中,我有幸能够成为Adams 公司的一员,经历了许多机会和挑战,并从中汲取了宝贵的经验和体会。
首先,Adams公司注重员工的综合素质提升。
公司提供了广泛的培训机会,包括专业知识、技能和软实力的培训。
通过这些培训,我学到了许多新知识和技能,不仅提高了自己在职场上的竞争力,也拓宽了自己的视野。
我深刻体会到学习是一种持续不断的过程,在不断学习新知识的同时,也要不断反思和总结,不断提升自己的能力。
其次,Adams公司重视团队合作。
在公司的项目中,我有机会与不同领域、不同能力的人合作,这让我更好地认识到团队协作的重要性。
通过与团队成员的合作,我学会了倾听,学会了与他人有效地沟通和协商,也懂得了如何在团队中发挥个人的优势和价值。
团队合作不仅能够提高工作效率,还能够促进个人成长和发展。
此外,Adams公司注重创新和不断进取。
在项目中,我有机会提出自己的想法和建议,并得到了领导和团队成员的支持和认可。
这让我深刻体会到创新的重要性。
创新不仅可以提高工作的效率和质量,还可以激发团队成员的潜力和创造力。
在创新的过程中,我也学会了勇于尝试和接受失败,从失败中吸取教训并不断调整和改进。
除了以上的经验和体会,我还学到了许多关于领导力和人际关系的知识。
Adams公司注重培养员工的领导力和团队管理能力,在参与项目的过程中,我有机会担任一些小组的负责人,学习并提升了自己的领导能力。
同时,通过与同事和客户的交往,我也学到了如何与不同类型的人建立和谐的工作关系,这对于我个人在职场中的发展非常有帮助。
总的来说,作为Adams公司的一员,我在工作中获得了许多宝贵的经验和体会。
这些经验和体会不仅帮助我提升了自己的能力和素质,也让我更好地适应了职场的挑战和变化。
我深信,只要不断总结和反思,不断学习和提升自己,就能够在职场中实现个人的价值和成长。
ADAMS个人学习总结
ADAMS个人学习总结
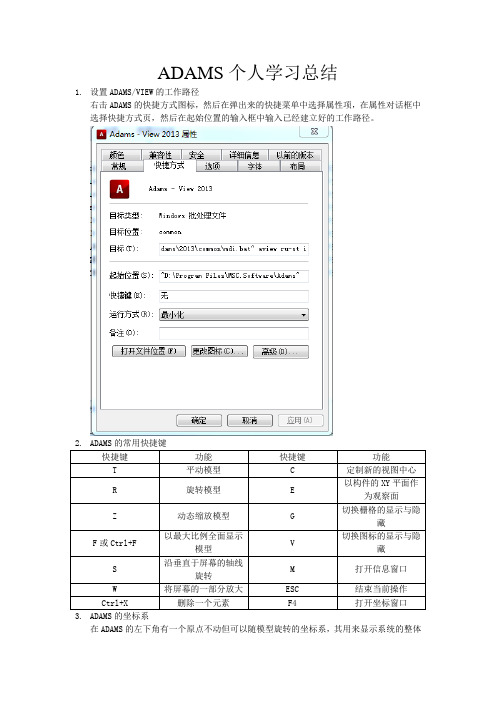
1.设置ADAMS/VIEW的工作路径
右击ADAMS的快捷方式图标,然后在弹出来的快捷菜单中选择属性项,在属性对话框中选择快捷方式页,然后在起始位置的输入框中输入已经建立好的工作路径。
3.ADAMS的坐标系
在ADAMS的左下角有一个原点不动但可以随模型旋转的坐标系,其用来显示系统的整体
坐标系,默认为笛卡尔坐标系,另外每个刚体的质心处系统会固定一个坐标系,称为连体坐标系。
ADAMS中有三种坐标形式,可通过【Settings】→【coordinate system】设置。
4.设置工作栅格
可通过【Settings】→【Working Grid】设置。
5.设置单位制和重力加速度
可分别通过【Settings】→【Units】和【Settings】→【Gravity】对单位制和重力加速度设置。
6.部件的旋转操作
7.添加约束。
adams函数学习总结
二、三角函数 SIN(x) SINH(x) COS(x) COSH(x) TAN(x) TANH(x) ASIN(x) ACOS(x) ATAN(x) ATAN2(x1,x2) 切值
数字表达式x的正弦值 数字表达式x的双曲正弦值 数字表达式x的余弦值 数字表达式x的双曲余弦值 数字表达式x的正切值 数字表达式x的双曲正切值 数字表达式x的反正弦值 数字表达式x的反余弦值 数字表达式x的反正切值 两个数字表达式x1,x2的四象限反正
• • • • • • • • •
DIFF DIFFERENTIATE DMAT DOT ELEMENT EXCLUDE FIRST FIRST_N INCLUDE INTEGR INTERATE INVERSE LAST LAST_N MAX MAXI MEAN MIN MINI NORM2 NORMALIZE RECTANGULAR RESAMPLE RESHAPE RMS ROWS SERIES
0时返回absxsqrtx数字表达式x的平方根值数学函数二三角函数sinx数字表达式x的正弦值sinhx数字表达式x的双曲正弦值cosx数字表达式x的余弦值coshx数字表达式x的双曲余弦值tanx数字表达式x的正切值tanhx数字表达式x的双曲正切值asinx数字表达式x的反正弦值acosx数字表达式x的反余弦值atanx数字表达式x的反正切值atan2x1x2两个数字表达式x1x2的四象限反正切值三取整函数intx数字表达式x取整aintx数字表达式x向绝对值小的方向取整anintx数字表达式x向绝对值大的方向取整ceilx数字表达式x向正无穷的方向取整floorx数字表达式x向负无穷的方向取整nintx最接近数字表达式x的整数值rtoix返回数字表达式x的整数部分位置方向函数一位置函数localongline返回两点连线上与第一点距离为指定值的点loccylindrical将圆柱坐标系下坐标值转化为笛卡儿坐标系下坐标值locframemirror返回指定点关于指定坐标系下平面的对称点locglobal返回参考坐标系下的点在全局坐标系下的坐标值locinline将一个参考坐标系下的坐标值转化为另一参考坐标系下的坐标值并归一化locloc将一个参考坐标系下的坐标值转化为另一参考坐标系下的坐标值loclocal返回全局坐标系下的点在参考坐标系下的坐标值locmirror返回指定点关于指定坐标系下平面的对称点loconaxis沿轴线方向平移loconline返回两点连线上与第一点距离为指定值的点locperpendicular返回平面法线上距离指定点单位长度的点locplanemirror返回特定点关于指定平面的对称点locrelativeto返回特定点在指定坐标系下的坐标值locspherical将球面坐标转化为笛卡儿坐标locxaxis坐标系x轴在全局坐标中的单位矢量locyaxis坐标系y轴在全局坐标中的单位矢量loczaxis坐标系z轴在全局坐标中的单位矢量二方向函数orialignaxis将坐标系按指定方式旋转至与指定方向对齐所需旋转的角度orialongaxiseul将坐标系按指定方式旋转至与全局坐标系一个轴方向对齐所需旋转的角度oriallaxes将坐标系旋转至由平面上的点定义的特定方向第一轴与指定平面上两点连线平行第二轴与指定平面平行时所需旋转的角度orialongaxis将坐标系旋转至其一轴线沿指
ADAMS个人学习总结
ADAMS个人学习总结
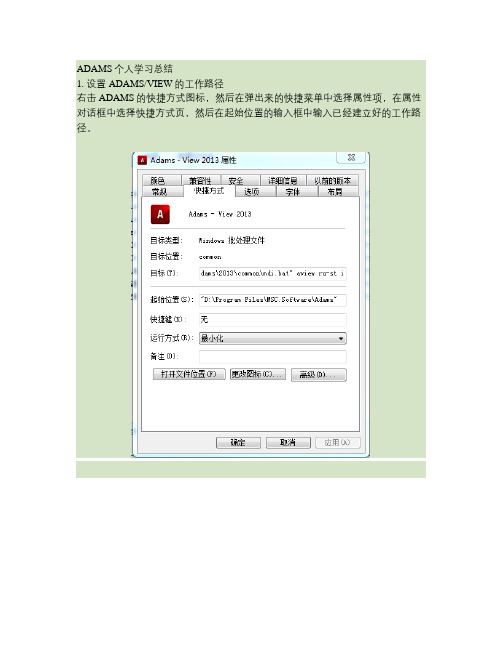
1. 设置ADAMS/VIEW的工作路径
右击ADAMS的快捷方式图标,然后在弹出来的快捷菜单中选择属性项,在属性对话框中选择快捷方式页,然后在起始位置的输入框中输入已经建立好的工作路径。
3. ADAMS的坐标系
在ADAMS的左下角有一个原点不动但可以随模型旋转的坐标系,其用来显示系统的整体
坐标系,默认为笛卡尔坐标系,另外每个刚体的质心处系统会固定一个坐标系,称为连体坐标系。
ADAMS中有三种坐标形式,可通过【Settings】→【coordinate system】设置。
4. 设置工作栅格
可通过【Settings】→【Working Grid】设置。
5. 设置单位制和重力加速度
可分别通过【Settings】→【Units】和【Settings】→【Gravity】对单位制和重力加速度设置。
6. 部件的旋转操作
7.添加约束。
adams函数学习总结

在使用后者的过程中很多人会误表示为: step(time,0,0d,3,0d)+ step(time,3,0d,5,5d)+ step(time,5,5d,8,5d)+ step(time,8,5d,10,0d)+ step(time,10,0d,12,0d) 还有一种是错误的: step(time,3,0d,5,5d)+ step(time,8,5d,10,0d) 这两种都是错误的表示的方法,不信你自己可以试试的 总结:从上面的例子中大家可以清楚的看出,增量式明显比嵌 入式要简洁的多,但是嵌入式却比增量式思路要清晰、严谨的 多,他们各有自己的优点,所以大家可以针对性的使用他们, 习惯用什么方式就用什么方式,当然他们还有其他的不同点我 还没想到的,也欢迎你多多提出意见。
• • • • • • • • •
DIFF DIFFERENTIATE DMAT DOT ELEMENT EXCLUDE FIRST FIRST_N INCLUDE INTEGR INTERATE INVERSE LAST LAST_N MAX MAXI MEAN MIN MINI NORM2 NORMALIZE RECTANGULAR RESAMPLE RESHAPE RMS ROWS SERIES
Step函数
• 相信大家对step的用法已经是相当的熟练了,在这里我只 是想把自己对step的理解总结一下,希望能对大家有所帮 助。 • 首先简要介绍下step的形式及其各个参数的物理含义: • 格式:STEP (x, x0, h0, x1, h1) • 参数说明: • Step函数是3次多项式逼近阶跃函数 • Step5函数是5次多项式逼近阶跃函数 • x ―自变量,可以是时间或时间的任一函数 • x0 ―自变量的STEP函数开始值,可以是常数或函 数表达式或设计变量; • x1 ―自变量的STEP函数结束值,可以是常数、函 数表达式或设计变量 • h0 ― STEP函数的初始值,可以是常数、设计变量 或其它函数表达式 • h1 ― STEP函数的最终值,可以是常数、设计变量 或其它函数表达式
adams学习心得

运动副:按照运动副的接触形式分类:面和面接触的运动副在接触部分的压强较低,被称为低副,而点或线接触的运动副称为高副,高副比低副容易磨损。
共振:指机械系统所受激励的频率与该系统的固有频率相接近时候,系统振幅显著增大的现象。
通常是有害的。
由于软件问题,当出现自己发现莫名其妙的问题时,可以选择关闭再重启试试……1.tool,打开database navigater,选择highlight,可点击查看,选择各部件。
前端含+处,需双击点开。
Sensor 传感器 variable 可变的 integer 整数entity 实体 attribute 属性View——model,打开一个文件时候,不显示时使用---part only首先设置gravity,units(单位),网格、①合并merge:先选要合并的次要件,再选主要部件。
选择时,打开database管理器,对着部件表,在部件周边右键选择。
合并与重命名应该是同步交叉进行的,如车体合并前就需要先将某个part如part7先行重命名。
蛋的合并也在重命名之后。
回转体依然。
注:本例中回转体的宏命令并未将其合并,part75后续合并。
这个不是问题。
从命名之后的合并,中间一个part的缺失会引出一个错误,如何解决“??②重命名。
是part的重命名。
后,于检查database中 ,检查是否所有更改完毕。
.my_rename_dan !重命名variable creat variable_name=ip integer_value=0while condition=(ip<20) 【1-20:假设范围是20到61,则初值定为19,范围定为61】variable modify variable_name= ipinteger_value=(eval(ip+1))entity modify entity=(eval(".zhengxiang.PART"//(6*(ip-1)+38)))&new = (eval(".zhengxiang.dan_"//ip))end !zhengxiang是文件名,后面是部件原部件名称,new后面即为新名字,dan1等…… 6*(ip-1)+38这种式子需要自己算variable delete variable_name= ipvariable creat variable_name=ip integer_value=0while condition=(ip<20)variable modify variable_name= ipinteger_value=(eval(ip+1))entity modify entity=(eval(".zhengxiang.PART"//(6*(ip-1)+159)))&new = (eval(".zhengxiang.dan_"//(ip+20))) end !命名21-40variable delete variable_name= ip更改颜色variable create variable_name=ip integer_value=0 while condition=(ip<20)variable modify variable_name= ipinteger_value=(eval(ip+1))entity attributes &entity_name =(eval(".zhengxiang.dan_"//ip//".solid4")) &type_filter = Solid &visibility = no_opinion &name_visibility = no_opinion &color = .colors.RED &entity_scope = all_color &&&transparency = 0!endvariable delete variable_name= ip.my_merge_cheti(合并元件)variable creat variable_name=ip integer_value=10 !创建变量,名为IP,赋予初值10while condition=(ip<18) !条件循环语句variable modify variable_name=ipinteger_value=(eval(ip+1)) !变量自动加一part merge rigid_bodypart_name=(eval(".cheti.PART"//ip)) into_part=.cheti.cheendvariable delete variable_name= ip !删除变量更改合并后的part的颜色,因为颜色只能改solid的。
adams心得体会

adams心得体会心得体会一、背景Adams是一位长期从事文案创作的专家,通过多年的经验积累,他深刻认识到文案的重要性以及对读者的影响。
本文将从Adams的视角出发,总结其在文案创作方面的心得体会。
二、创作原则1.目标导向在创作文案时,我们一定要明确目标受众的需求和期望。
只有深入了解受众,我们才能采取针对性的策略来撰写文案,使其能够准确传达信息,并激发读者的兴趣与共鸣。
2.独特性创意与独特性是文案的灵魂,我们要尽量避免使用陈词滥调和俗套的表达方式。
通过运用创新的观点、资讯和故事情节等元素,我们能够吸引读者的眼球,让他们产生持续关注的欲望。
3.简洁清晰言简意赅是好文案的基本要求。
我们应该尽量精简句子,避免冗长和晦涩的表达方式。
另外,重要信息的排版应该突出,可以通过字号、颜色等方式进行强调,以便读者能够快速抓住关键内容。
三、文案撰写技巧1.情感共鸣人们往往在情感上与文案产生共鸣,因此在创作文案时,我们应该充分考虑读者的情感体验。
通过引发读者的共情,我们可以更好地传达信息,使其能够产生积极的情感反馈。
2.故事叙述故事是文案吸引人的重要手段之一。
我们可以借用故事的力量来传递信息,用真实生动的故事情节来吸引读者的注意力。
同时,通过故事的脉络和逻辑展开,我们能够更好地阐释产品或服务的特点与优势。
3.核心亮点在文案创作中,要想让读者产生持续的兴趣,我们需要抓住产品或服务的核心亮点。
通过突出这些亮点,我们能够吸引读者的关注,并引发他们对产品的购买欲望。
四、案例分析为了更好地阐释上述原则和技巧,我将选取一则典型的广告文案进行分析。
广告文案:“美丽的风景,源于我们的专业。
我们是一家拥有多年经验的旅行社,我们不仅提供舒适的酒店和观光旅游线路,更重要的是我们致力于为每一位旅客带来美好的回忆。
无论您是想要追寻浪漫的巴黎之夜,还是想要体验独特的东京文化,我们都能够为您量身定制最适合您的旅行方案。
我们的团队由一群热情的旅游专家组成,他们对每个目的地都了如指掌。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运动副:按照运动副的接触形式分类:面和面接触的运动副在接触部分的压强较低,被称为低副,而点或线接触的运动副称为高副,高副比低副容易磨损。
共振:指机械系统所受激励的频率与该系统的固有频率相接近时候,系统振幅显著增大的现象。
通常是有害的。
由于软件问题,当出现自己发现莫名其妙的问题时,可以选择关闭再重启试试……1.tool,打开database navigater,选择highlight,可点击查看,选择各部件。
前端含+处,需双击点开。
Sensor 传感器 variable 可变的 integer 整数entity 实体 attribute 属性View——model,打开一个文件时候,不显示时使用---part only首先设置gravity,units(单位),网格、①合并merge:先选要合并的次要件,再选主要部件。
选择时,打开database管理器,对着部件表,在部件周边右键选择。
合并与重命名应该是同步交叉进行的,如车体合并前就需要先将某个part如part7先行重命名。
蛋的合并也在重命名之后。
回转体依然。
注:本例中回转体的宏命令并未将其合并,part75后续合并。
这个不是问题。
从命名之后的合并,中间一个part的缺失会引出一个错误,如何解决“??②重命名。
是part的重命名。
后,于检查database中 ,检查是否所有更改完毕。
.my_rename_dan !重命名variable creat variable_name=ip integer_value=0while condition=(ip<20) 【1-20:假设范围是20到61,则初值定为19,范围定为61】variable modify variable_name= ipinteger_value=(eval(ip+1))entity modify entity=(eval(".zhengxiang.PART"//(6*(ip-1)+38)))&new = (eval(".zhengxiang.dan_"//ip))end !zhengxiang是文件名,后面是部件原部件名称,new后面即为新名字,dan1等…… 6*(ip-1)+38这种式子需要自己算variable delete variable_name= ipvariable creat variable_name=ip integer_value=0while condition=(ip<20)variable modify variable_name= ipinteger_value=(eval(ip+1))entity modify entity=(eval(".zhengxiang.PART"//(6*(ip-1)+159)))&new = (eval(".zhengxiang.dan_"//(ip+20))) end !命名21-40variable delete variable_name= ip更改颜色variable create variable_name=ip integer_value=0 while condition=(ip<20)variable modify variable_name= ipinteger_value=(eval(ip+1))entity attributes &entity_name =(eval(".zhengxiang.dan_"//ip//".solid4")) &type_filter = Solid &visibility = no_opinion &name_visibility = no_opinion &color = .colors.RED &entity_scope = all_color &&&transparency = 0!endvariable delete variable_name= ip.my_merge_cheti(合并元件)variable creat variable_name=ip integer_value=10 !创建变量,名为IP,赋予初值10while condition=(ip<18) !条件循环语句variable modify variable_name=ipinteger_value=(eval(ip+1)) !变量自动加一part merge rigid_bodypart_name=(eval(".cheti.PART"//ip)) into_part=.cheti.cheendvariable delete variable_name= ip !删除变量更改合并后的part的颜色,因为颜色只能改solid的。
合并、重命名、更改颜色后,赋予质量属性。
针对part。
赋予质量属性时,应按照database的顺序一一更改,以防遗漏。
应当先赋予材料属性,再更改质量属性。
当材料定好后,系统默认自动生成.cm坐标系。
赋予材料属性,不同语句for variable_name=var start_value=1 end_value=40part modify rigid_body mass_properties &part_name=(eval(".mo.dan_"//rtoi(var))) &material_type=.mo.steelend错误提示:No Material was found because 'steel' does not exist beneath '.MODEL_1'.因为模型中尚无steel材料,将其余某part赋予该材料即可解决。
赋予质量属性:variable creat variable_name=ip integer_value=0while condition=(ip<40)variable modify variable_name=ip integer_value=(eval(ip+1))part modify rigid mass_properties &part_name =(eval(".mo.dan_"//ip)) &mass = 67.6848748212 ¢er_of_mass_marker = (eval(".mo.dan_"//ip//".cm")) &inertia_marker =(eval(".mo.dan_"//ip//".cm")) &ixx = 3.8242818381E+007 &iyy = 3.8242793132E+007 &izz = 1.1808667107E+005 &ixy = 0.0 &izx = -9.6212100786E-010 &iyz = -2.9877359267E-009endvariable delete variable_name= ipdatabase中的information中可以查看各部件的相关信息,查看各部分内容是否齐全验证模型在所有构建接赋予材料属性后,要验证模型的正确性,即在重力下进行一次仿真,default模式下点击开始,如果正确无误,模型会在重力作用下“掉”下来。
每次验证成功后,皆可保存副本备用。
添加轮胎Tire property file:D:\MSC.Software\MD_Adams\2010\acar\shared_car_database.cdb\ tires.tbl\uat.tirRoad:D:\MSC.Software\MD_Adams\2010\acar\shared_car_database.cdb\ roads.tbl\2d_flat.rdf将上面两文件拷贝于工作目录,即可。
其中,两文件中相关数据需要时应变动。
构建路面时,第一个是create,后面的是选择。
Part选项应该选择ground。
角度应该是0,270,0——可以保证路面方向向上,否则轮胎会坠落。
Location是点选。
轮胎角度是90,90,0.轮胎中心点位置点选。
添加轮胎时应注意轮胎中心,轮胎对照对齐。
(选中心点时注意)路面构建好后,做静态模型验证时候,轮胎不动,其他部件在重力作用下掉落,前提是路面方向正确(因为轮胎为默认在路面之上)。
路面的大小,即长宽问题,应试可更改,乃至长宽方向等皆需逐步更改。
数据输入时,及时括号,逗号,都得是英文下添加约束:添加约束时,尽量做一部分就进行下模型验证,防止后期出错,难以查明。
在需要选定运动副方向时,可现在点处建一坐标系,方向选定时选择点为该坐标,方向为坐标系某轴。
自己选择的方向一定要再三验证无误才可。
固定副的锁形状方向平行于网格方向——norm to grid模式下。
固定副只要加载于center即可,固定副的位置与方向都不影响仿真结果。
添加弹簧(spring)——(跟轮胎在同一主图标下),弹簧,先选择作用力部件,在选择反作用力部件,且选择中心位置。
滑移副——滑移方向与网格垂直——norm to grid模式下。
旋转副——旋转轴垂直于网格,旋转的箭头标识平行于网格平面——norm to grid模式下。
应该以旋转轴为准,想着旋转方向。
Bushing——(跟轮胎在同一主图标下),先选择作用力部件,在选择反作用力部件,且选择中心位置。
其有方向,中轴垂直于网格平面。
此中,四个选项数据皆为一个代表三个方向XYZ,正确做法应该是不选择,当bushing建好后,再modify中更改数据Torson spring——显示为平面箭头,箭头方向平行于网格平面——norm to grid模式下。
管与弹间固定副忘记添加……tudi与ground固定副……千斤顶的移动副,高低机的移动副……车体与千斤顶的固定副……高低机与上架的旋转副……千斤顶与地面的固定副……上架与回转体的两个旋转副……添加约束——固定约束variable create variable_name=ip integer_value=0while condition=(ip<20)variable modify variable_name=ip integer_value=(eval(ip+1))constraint create joint fixed &joint_name =(eval(".mo.joint_fixed_guan"//ip)) &i_part_name =(eval(".mo.guan_"//ip)) &j_part_name=.mo.zuokuang &location=(eval(".mo.guan_"//ip//".cm")) &orientation=0,0,0endvariable delete variable_name=ipvariable create variable_name=ip integer_value=20while condition=(ip<40)variable modify variable_name=ip integer_value=(eval(ip+1))constraint create joint fixed &joint_name =(eval(".mo.joint_fixed_guan"//ip)) &i_part_name =(eval(".mo.guan_"//ip)) &j_part_name=.mo.youkuang&location=(eval(".mo.guan_"//ip//".cm")) &orientation=0,0,0endvariable delete variable_name=ipcontact的设定contact位于connector一栏,即与tire、spring一栏。