数字信号处理课后习题答案完整版
数字信号处理教程课后习题及答案

分析:已知边界条件,如果没有限定序列类型(例如因果序列、反因果序列等), 则递推求解必须向两个方向进行(n ≥ 0 及 n < 0)。
解 : (1) y1 (0) = 0 时, (a) 设 x1 (n) = δ (n) ,
按 y1 (n) = ay1 (n − 1) + x1 (n) i) 向 n > 0 处递推,
10
T [ax1(n)+ bx2 (n)] =
n
∑
[ax1
(n
)
+
bx2
(n
)]
m = −∞
T[ax1(n) + bx2(n)] = ay1(n) + by2(n)
∴ 系统是线性系统
解:(2) y(n) =
[x(n )] 2
y1(n)
= T [x1(n)] = [x1(n)] 2
y2 (n) = T [x2 (n)] = [x2 (n)] 2
β α
n +1
β α β =
n +1− N −n0
N−
N
α −β
y(n) = Nα n−n0 ,
(α = β )
, (α ≠ β )
如此题所示,因而要分段求解。
2 .已知线性移不变系统的输入为 x( n ) ,系统的单位抽样响应
为 h( n ) ,试求系统的输出 y( n ) ,并画图。
(1)x(n) = δ (n)
当n ≤ −1时 当n > −1时
∑ y(n) = n a −m = a −n
m=−∞
1− a
∑ y(n) =
−1
a−m =
数字信号处理(第三版)课后习题答案全
因此
d X ( e j ) FT[ nx( n)] j d
第2章
时域离散信号和系统的频域分析
6. 试求如下序列的傅里叶变换: (1) x1(n)=δ(n-3) (2) x2 (n) δ(n 1) δ(n) δ(n 1) (4) x4(n)=u(n+3)-u(n-4) 解 (1)
0.5ቤተ መጻሕፍቲ ባይዱ 2 n
n<0时, c内有极点0.5、 2、 0, 但极点0是一个n阶极点,
改成求c外极点留数, 可是c外没有极
点, 因此 x(n)=0 最后得到
x(n)=(0.5n-2n)u(n)
第2章
时域离散信号和系统的频域分析
19. 用部分分式法求以下X(z)的反变换:
(1)
1 1 z 1 3 X ( z) , 1 2 5z 2 z 2
7 7 j j e 2 (e 2 1 1 j j e 2 (e 2 7 j e 2 ) 1 j e 2 )
e j3
7 sin( ) 2 1 sin( ) 2
第2章
时域离散信号和系统的频域分析
14. 求出以下序列的Z变换及收敛域: (1) 2-nu(n) (5) δ(n-1) 解 (1) ZT[2 n u(n)]
n n
n 1
2n z n z 1 2
2z 1 1 2 z 1 2 1 z 1 (5) ZT[δ(n-1)]=z-10<|z|≤∞
第2章
16. 已知
时域离散信号和系统的频域分析
3 2 X ( z) 1 1 1 2 z 1 1 z 2
求出对应X(z)的各种可能的序列表达式。
(完整版)数字信号处理课后答案_史林版_科学出版社

第一章 作业题 答案############################################################################### 1.2一个采样周期为T 的采样器,开关导通时间为()0T ττ<<,若采样器的输入信号为()a x t ,求采样器的输出信号()()()a a x t x t p t ∧=的频谱结构。
式中()()01,()0,n p t r t n t r t ττ∞=-∞=-≤≤⎧=⎨⎩∑其他解:实际的采样脉冲信号为:()()n p t r t n τ∞=-∞=-∑其傅里叶级数表达式为:()000()jk tn p t Sa k T eTωωτω∞=-∞=∑采样后的信号可以表示为:()()()ˆa a xt x t p t δ= 因此,对采样后的信号频谱有如下推导:()()()()()()()()()()()()()0000000000000ˆˆsin 1j t a a jk t j t a n jk t j t a k j k ta k ak a k X j x t e dtx t Sa k T e e dtTSa k T x t e e dtTSa k T x t edtTSa k T X j jk Tk T X j jk T kωωωωωωωωτωωτωωτωωτωωωωωω∞--∞∞∞--∞=-∞∞∞--∞=-∞∞∞---∞=-∞∞=-∞∞=-∞Ω=====-=-⎰∑⎰∑⎰∑⎰∑∑%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 1.5有一个理想采样系统,对连续时间信号()a x t 进行等间隔T 采样,采样频率8s πΩ=rad/s ,采样后所得采样信号()a x t ∧经理想低通滤波器()G j Ω进行恢复,已知()41/4,,4G j ππ⎧Ω≤⎪Ω=⎨Ω>⎪⎩今有两个输入信号12()cos(2)()cos(5)a a x t t x t t ππ==和,对应的输出信号分别为12()()a a y t y t 和,如题1.5图所示,问12()()a a y t y t 、有没有失真,为什么?题1.5图 理想采样系统与恢复理想低通滤波器解:因为是理想采样系统,因此采样后的信号频谱可以表示为:()()1ˆa a s k X j X j jk T ∞=-∞Ω=Ω-Ω∑8s πΩ=,12πΩ=,25πΩ=,折叠频率为2s Ω,而滤波器对4πΩ≤的信号通过,因此有如下图:结论:1)1()a y t 不失真、2()a y t 失真。
数字信号处理课后习题答案

数字信号处理(姚天任江太辉)第三版课后习题答案第二章2.1 判断下列序列是否是周期序列。
若是,请确定它的最小周期。
(1)x(n)=Acos(685ππ+n ) (2)x(n)=)8(π-nej(3)x(n)=Asin(343ππ+n )解 (1)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),得出=ω85π。
因此5162=ωπ是有理数,所以是周期序列。
最小周期等于N=)5(16516取k k =。
(2)对照复指数序列的一般公式x(n)=exp[ωσj +]n,得出81=ω。
因此πωπ162=是无理数,所以不是周期序列。
(3)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),又x(n)=Asin(343ππ+n )=Acos(-2π343ππ-n )=Acos(6143-n π),得出=ω43π。
因此382=ωπ是有理数,所以是周期序列。
最小周期等于N=)3(838取k k = 2.2在图2.2中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。
计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。
解 利用线性卷积公式y(n)=∑∞-∞=-k k n h k x )()(按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。
(a) y(0)=x(O)h(0)=1y(l)=x(O)h(1)+x(1)h(O)=3y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n ≥2 (b) x(n)=2δ(n)-δ(n-1)h(n)=-δ(n)+2δ(n-1)+ δ(n-2)y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)=∑∞-∞=--k kn k n u k u a)()(=∑∞-∞=-k kn a=aa n --+111u(n) 2.3 计算线性线性卷积 (1) y(n)=u(n)*u(n) (2) y(n)=λnu(n)*u(n)解:(1) y(n)=∑∞-∞=-k k n u k u )()(=∑∞=-0)()(k k n u k u =(n+1),n ≥0即y(n)=(n+1)u(n) (2) y(n)=∑∞-∞=-k k k n u k u )()(λ=∑∞=-0)()(k kk n u k u λ=λλ--+111n ,n ≥0即y(n)=λλ--+111n u(n)2.4 图P2.4所示的是单位取样响应分别为h 1(n)和h 2(n)的两个线性非移变系统的级联,已知x(n)=u(n), h 1(n)=δ(n)-δ(n-4), h 2(n)=a nu(n),|a|<1,求系统的输出y(n). 解 ω(n)=x(n)*h 1(n)=∑∞-∞=k k u )([δ(n-k)-δ(n-k-4)]=u(n)-u(n-4)y(n)=ω(n)*h 2(n)=∑∞-∞=k kk u a )([u(n-k)-u(n-k-4)]=∑∞-=3n k ka,n ≥32.5 已知一个线性非移变系统的单位取样响应为h(n)=a n-u(-n),0<a<1 用直接计算线性卷积的方法,求系统的单位阶跃响应。
邹理和《数字信号处理上》课后习题答案

n = −∞ ∞
∑ cos 2 n
n = −∞ ∞
∞
π
∑ − cos
3π n 2
n = −∞
∑ cos
5π n 2
频谱混淆现象是指采样频率小于带限信号的最高频率(0 到 2π内) 的 2 倍时所产生 的一种频谱混叠,使得采样后的序列不能真正反映原信号。
3.解:
对于 x a1 来说 ω M =2π,而 ω s =8π>2 ω M =4π,∴ y a (t ) 无失真,可以被还原; 对于 x a 2 来说 ω M =5π,而 ω s =8π<2 ω M =10π,∴ y a (t ) 有失真,不可以被还原;
需要其他考研资料
发邮件到:huntsmanydw@
数字信号处理(邹理和编)
课后习题答案
第 2 页,共 84 页
4.解: (1)δ(n)因果稳定 (3)u(n), 因果非稳定
;(2) δ(n- n 0 ), n0 >=0,因果稳定; n 0 <0,稳定非因果 ;(4)u(3-n),非因果非稳定
y ( n ) = 0 .5 n u ( n ) ⊗ R 5 ( n ) a )0 ≤ n < 4时, y (n) = 2 − 2 n b)n ≥ 4时, y (n) = 31 ⋅ 2 n y (n) = 0.5 n u (n) ⊗ R5 (n)
6.解:
需要其他考研资料
发邮件到:huntsmanydw@
(11)
; (12)
5.解: (1)
R4 (n) = δ (n) + δ (n − 1) + δ (n − 2) + δ (n − 3) y (n) = R4 (n) ⊗ R4 (n) = δ (n) + 2δ (n − 1) + 3δ (n − 2) + 4δ (n − 3) + 3δ (n − 4) + 2δ (n − 5) + δ (n − 6) R4 (n) = δ (n) + δ (n − 1) + δ (n − 2) + δ (n − 3) y (n) = R4 (n) ⊗ R4 (n) = δ (n) + 2δ (n − 1) + 3δ (n − 2) + 4δ (n − 3) + 3δ (n − 4) + 2δ (n − 5) + δ (n − 6) (2) y (n) = 2 n R4 (n) ⊗ [δ (n) − δ (n − 2)] = 2 n R4 (n) − 2 n − 2 R4 (n − 2) (3)
数字信号处理课后答案

k = n0
∑
n
x[ k ]
(B) T {x[n]} =
∑
x[k ]
(C) T {x[ n]} = 0.5
x[ n ]
(D) T {x[n]} = x[− n]
1-5 有一系统输入为 x[n] ,输出为 y[n] ,满足关系 y[n] = ( x[n] ∗ u[n + 2])u[n] ,则系统是(A) (A)线性的 (B)时不变的 (C)因果的 (D)稳定的 解:
(a) T { x[ n ]} = h[ n] + x[ n ], (c) T {x[ n]} = ∑ x[ n − k ]
δ [n] + aδ [n − n0 ] ,单位阶跃响应 s[n] = u[n] + au[n − n0 ] 。
1-15 线性常系数差分方程为 y[n] − y[n − 1] +
y[n] = 0 , n < 0 , 则 y[3] = 0.5 。 解: y[0] = y[ −1] − 0.25 y[ −2] + x[0] = 1 y[1] = y[0] − 0.25 y[ −1] + x[1] = 1 y[2] = y[1] − 0.25 y[0] + x[2] = 0.75 y[3] = y[2] − 0.25 y[1] + x[3] = 0.5
∞ ∞ k =−∞ n '=−∞
解: (a)
n =−∞
∑ y[n] = ∑ ∑ x[k ]h[n − k ] = ∑ x[k ] ∑ h[n − k ] = ∑ x[k ] ∑ h[n ']
n =−∞ k =−∞ k =−∞ n =−∞
∞
∞
∞
数字信号处理课后习题答案(全)1-7章
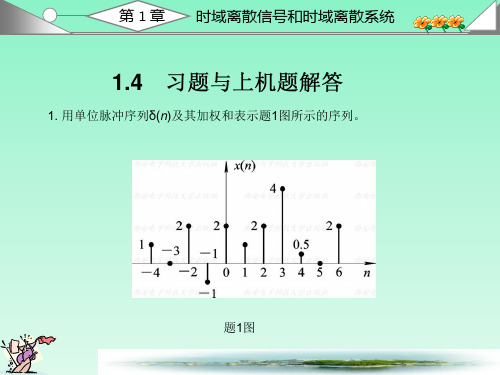
第 1 章 时域离散信号和时域离散系统
(3) 这是一个延时器, 延时器是线性非时变系统, 下面证明。 令输入为
输出为
x(n-n1)
y′(n)=x(n-n1-n0) y(n-n1)=x(n-n1-n0)=y′(n) 故延时器是非时变系统。 由于
T[ax1(n)+bx2(n)]=ax1(n-n0)+bx2(n-n0) =aT[x1(n)]+bT[x2(n)]
(5)y(n)=x2(n)
(6)y(n)=x(n2)
(7)y(n)=
n
(8)y(n)=x(n)sin(ωxn(m) )
m0
解: (1) 令输入为
输出为
x(n-n0)
y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2)
第 1 章 时域离散信号和时域离散系统
题8解图(一)
第 1 章 时域离散信号和时域离散系统
(5) 画x3(n)时, 先画x(-n)的波形(即将x(n)的波形以纵轴为中心翻转180°), 然后再右移2位, x3(n)波形如题2解图(四)所示。
第 1 章 时域离散信号和时域离散系统
题2解图(一)
第 1 章 时域离散信号和时域离散系统
题2解图(二)
第 1 章 时域离散信号和时域离散系统
题2解图(三)
分别求出输出y(n)。
(1) h(n)=R4(n), x(n)=R5(n) (2) h(n)=2R4(n), x(n)=δ(n)-δ(n-2) (3) h(n)=0.5nu(n), xn=R5(n)
解: (1) y(n)=x(n)*h(n)=
数字信号处理课后习题答案
(修正:此题有错,
(3)系统的单位脉冲响应 而改变,是两个复序列信号之和)
(4)
(修正: 随上小题答案
(修正:此图错误,乘系数应该为 0.5,输出端 y(n)应该在两个延迟器 D 之间)
1-25 线性移不变离散时间系统的差分方程为
(1)求系统函数 ; (2)画出系统的一种模拟框图; (3)求使系统稳定的 A 的取值范围。 解:(1)
(2)
(3)
解:(1)
(2)
(3)
1-7 若采样信号 m(t)的采样频率 fs=1500Hz,下列信号经 m(t)采样后哪些信号不 失真? (1) (2) (3) 解:
(1)
采样不失真
(2)
采样不失真
(3)
,
采样失真
1-8 已知
,采样信号 的采样周期为 。
(1) 的截止模拟角频率 是多少?
(2)将 进行 A/D 采样后, 如何?
(3)最小阻带衰减 5-4
由分式(5.39)根据 A 计算 ,如下: 由表 5.1 根据过度带宽度 计算窗口:
单位脉冲响应如下:
单位脉冲响应如下:
其中 为凯泽窗。 5-5 答:减小窗口的长度 N,则滤波器的过度带增加,但最小阻带衰减保持不变。 5-6:图 5.30 中的滤波器包括了三类理想滤波器,包括了低通,带通和高通,其响应的单位
(1)
,
(2)
1-18 若当 时
;时
(1)
,其中
(2) 证明:
,收敛域
,其中 N 为整数。试证明: ,
(1) 令 其中
,则 ,
(2)
,
1-19 一系统的系统方程及初时条件分别如下: ,
(1)试求零输入响应 ,零状态响应 ,全响应 ; (2)画出系统的模拟框图 解: (1)零输入响应
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字信号处理课后习题答案HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】数字信号处理(姚天任江太辉)第三版课后习题答案第二章判断下列序列是否是周期序列。
若是,请确定它的最小周期。
(1)x(n)=Acos(685ππ+n )(2)x(n)=)8(π-ne j(3)x(n)=Asin(343ππ+n )解 (1)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),得出=ω85π。
因此5162=ωπ是有理数,所以是周期序列。
最小周期等于N=)5(16516取k k =。
(2)对照复指数序列的一般公式x(n)=exp[ωσj +]n,得出81=ω。
因此πωπ162=是无理数,所以不是周期序列。
(3)对照正弦型序列的一般公式x(n)=Acos(ϕω+n ),又x(n)=Asin(343ππ+n )=Acos(-2π343ππ-n )=Acos(6143-n π),得出=ω43π。
因此382=ωπ是有理数,所以是周期序列。
最小周期等于N=)3(838取k k =在图中,x(n)和h(n)分别是线性非移变系统的输入和单位取样响应。
计算并列的x(n)和h(n)的线性卷积以得到系统的输出y(n),并画出y(n)的图形。
解 利用线性卷积公式y(n)=∑∞-∞=-k k n h k x )()(按照折叠、移位、相乘、相加、的作图方法,计算y(n)的每一个取样值。
(a) y(0)=x(O)h(0)=1y(l)=x(O)h(1)+x(1)h(O)=3y(n)=x(O)h(n)+x(1)h(n-1)+x(2)h(n-2)=4,n ≥2 (b) x(n)=2δ(n)-δ(n-1)h(n)=-δ(n)+2δ(n-1)+ δ(n-2)y(n)=-2δ(n)+5δ(n-1)= δ(n-3) (c) y(n)=∑∞-∞=--k kn k n u k u a)()(=∑∞-∞=-k kn a=aa n --+111u(n) 计算线性线性卷积 (1) y(n)=u(n)*u(n) (2) y(n)=λn u(n)*u(n)解:(1) y(n)=∑∞-∞=-k k n u k u )()(=∑∞=-0)()(k k n u k u =(n+1),n ≥0即y(n)=(n+1)u(n) (2) y(n)=∑∞-∞=-k k k n u k u )()(λ=∑∞=-0)()(k kk n u k u λ=λλ--+111n ,n ≥0即y(n)=λλ--+111n u(n)图所示的是单位取样响应分别为h 1(n)和h 2(n)的两个线性非移变系统的级联,已知x(n)=u(n), h 1(n)=δ(n)-δ(n-4), h 2(n)=a n u(n),|a|<1,求系统的输出y(n). 解 ω(n)=x(n)*h 1(n) =∑∞-∞=k k u )([δ(n-k)-δ(n-k-4)]=u(n)-u(n-4)y(n)=ω(n)*h 2(n) =∑∞-∞=k kk u a )([u(n-k)-u(n-k-4)]=∑∞-=3n k ka,n ≥3已知一个线性非移变系统的单位取样响应为h(n)=a n -u(-n),0<a<1 用直接计算线性卷积的方法,求系统的单位阶跃响应。
试证明线性卷积满足交换率、结合率和加法分配率。
证明 (1)交换律X(n) * y(n) =∑∞-∞=-k k n y k x )()(令k=n-t,所以t=n-k,又-∞<k<∞,所以-∞<t<∞,因此线性卷积公式变成 `x(n) * y(n) =∑∞-∞=---t t n n y t n x )]([)(=∑∞-∞=-t t y t n x )()(=y(n) * x(n)交换律得证. (2)结合律 [x(n) * y(n)] * z(n)=[∑∞-∞=-k k n y k x )()(] * z(n)=∑∞-∞=t [∑∞-∞=-k k t y k x )()(]z(n-t)=∑∞-∞=k x(k) ∑∞-∞=t y(t-k)z(n-t)=∑∞-∞=k x(k) ∑my(m)z(n-k-m)=∑∞-∞=k x(k)[y(n-k) * z(n-k)]=x(n) * [y(n) * z(n)] 结合律得证. (3)加法分配律 x(n) * [y(n) + z(n)]=∑∞-∞=k x(k)[y(n - k) +z(n - k)]=∑∞-∞=k x(k)y(n-k)+∑∞-∞=k x(k)z(n - k)=x(n) * y(n) + x(n) *z(n)加法分配律得证.判断下列系统是否为线性系统、非线性系统、稳定系统、因果系统。
并加以证明(1)y(n)= 2x(n)+3 (2)y(n)= x(n)sin[32πn+6π](3)y(n)=∑∞-∞=k k x )( (4)y(n)= ∑=nn k k x 0)((5)y(n)= x(n)g(n)解 (1)设y 1(n)=2x 1(n)+3,y 2(n)=2x 2(n)+3,由于y(n)=2[x 1(n)+x 2(n)]+3 ≠y 1(n)+ y 2(n) =2[x 1(n)+x 2(n)]+6故系统不是线性系统。
由于y(n-k)=2x(n-k)+3,T[x(n-k)]=2x(n-k)+3,因而y(n-k) = T[x(n-k)]因y(n)只取决于现在和过去的输入x(n),不取决于未来的输入,故该系统是因果系统。
(3)设 y 1(n)=∑-∞=n k k x )(1,y 2(n)=∑-∞=nk k x )(2,由于y(n)=T[ax 1(n)+ bx 2(n)]=∑-∞=+nk k k )](bx )(ax [21=a∑-∞=nk k x )(1+ b ∑-∞=nk k x )(2=ay 1(n)+by 2(n)故该系统是线性系统。
因 y(n-k)=∑--∞=t n k k x )(= ∑-∞=-nm t m x )(=T[x(n-t)]所以该系统是非移变系统。
设 x(n)=M<∞ y(n)=∑-∞=nk M =∞,所以该系统是不稳定系统。
因y(n)只取决于现在和过去的输入x(n),不取决于未来的输入,故该系统是因果系统。
(4)设 y 1(n)=∑=nn k k x 01)( ,y 2(n)=∑=nn k k x 02)(,由于y(n)=T[ax 1(n)+ bx 2(n)]= ∑=+nn k k k 021)](bx )(ax [= a ∑=n n k k x 01)(+b ∑=nn k k x 02)(=ay 1(n)+by 2(n)故该系统是线性系统。
因 y(n-k)= ∑-=tn n k k x 0)(=∑+=-ntn m t m x 0)(≠T[x(n-t)]= ∑=-nn k t m x 0)(所以该系统是移变系统。
设x(n)=M,则lim n →∞y(n)= lim n →∞(n-n 0)M=∞,所以该系统不是稳定系统。
显而易见,若n ≥n 0。
则该系统是因果系统;若n<n 0。
则该因果系统是非因果系统。
(5)设y 1(n)=x 1(n)g(n),y 2(n)=x 2(n)g(n),由于 y(n)=T[ax 1(n)+bx 2(n)]=(ax 1(n)+bx 2(n))g(n) =ax 1(n)g(n)+b 2(n)=ay 1(n)+by 2(n) 故系统是线性系统。
因y(n-k)=x(n-k),而T[x(n-k)]=x(n-k)g(n)≠y(n-k) 所以系统是移变系统。
设|x(n)|≤M<∞,则有|y(n)|=|x(n)g(n)|=M|g(n)| 所以当g(n)有限时该系统是稳定系统。
因y(n)只取决于现在和过去的输入x(n),不取决于本来的输入,故该系统是因果系统。
讨论下列各线性非移变系统的因果性和稳定性(1)h(n)=2n u(-n) (4) h(n)=(12)n u(n)(2) h(n)=-a n u(-n-1) (5) h(n)=1n u(n)(3) h(n)=δ(n+n 0), n 0≥0 (6) h(n)= 2n R n u(n) 解 (1)因为在n<0时,h(n)= 2n ≠0,故该系统不是因果系统。
因为S=n ∞=-∞∑|h(n)|= 0n ∞=∑|2n |=1<∞,故该系统是稳定系统。
(2) 因为在n<O 时,h(n) ≠0,故该系统不是因果系统。
因为S=n ∞=-∞∑|h(n)|=1n -=-∞∑| a n|=n ∞=∞∑a n -,故该系统只有在|a|>1时才是稳定系统。
(3) 因为在n<O 时,h(n) ≠0,故该系统不是因果系统。
因为S=n ∞=-∞∑|h(n)|=n ∞=-∞∑|δ(n+n 0)|=1<∞,故该系统是稳定系统。
(4) 因为在n<O 时,h(n)=0,故该系统是因果系统 。
因为S=n ∞=-∞∑|h(n)|= 0n ∞=∑|(12)n|<∞,故该系统是稳定系统。
(5) 因为在n<O 时,h(n)=1nu(n)=0,故该系统是因果系统 。
因为S=n ∞=-∞∑|h(n)|=n ∞=-∞∑|1n u(n)|= 0n ∞=∑1n =∞,故该系统不是稳定系统。
(6) 因为在n<O 时,h(n)=0,故该系统是因果系统 。
因为S=n ∞=-∞∑|h(n)|= 1N n -=∑|2n |=2N -1<∞,故该系统是稳定系统。
已知y(n)-2cos βy(n-1)+y(n-2)=0,且y(0)=0,y(1)=1,求证y(n)=sin()sin n ββ证明题给齐次差分方程的特征方程为α2-2cosβ·α+1=0 由特征方程求得特征根α1=cosβ+jsinβ=e jβ,α2=cosβ-jsinβ= e jβ-齐次差分方程的通解为y(n)=c1α1n+c2α2n=c1e j nβ+c2e j nβ-代入初始条件得y(0)=c1+c2=0y(1)= c1e j nβ+c2e j nβ-=1由上两式得到c 1=1j n j ne eββ--=12sinβ,c2=- c1=-12sinβ将c1和c2代入通解公式,最后得到y(n) =c1e j nβ+c2e j nβ-=12sinβ( e j nβ+ e j nβ-)=sin()sinnββ已知y(n)+2αy(n-1)+β(n-2)=0,且y(0)=0,y(1)=3,y(2)=6,y(3)=36,求y(n) 解首先由初始条件求出方程中得系数a和b由(2)2(1)(0)660(3)2(2)(1)361230 y ay by ay ay by a b ++=+=⎧⎨++=++=⎩可求出a=-1,b=-8 于是原方程为y(n)-2y(n-1)-iy(n-2)=0由特征方程α2-2α-8=0求得特征根α1=4 ,α2=-2齐次差分方程得通解为y(n)=c1α1n+c2α2n= c14n+c2(-2n)代入初始条件得y(n)= c1α1+c2α2= 4α1+2α2=3由上二式得到c 1=12,c2=-12将c1和c2代入通解公式,最后得到y(n)=c1α1n+c2α2n=12[4n-(-2) n]用特征根法和递推法求解下列差分方程:y(n)-y(n-1)-y(n-2)=0,且y(0)=1,y(1)=1 解由特征方程α2-α-1=0求得特征根α1=12+,α2=12-通解为y(n)=c1α1n+c2α2n=c1)n+c2)n代入初始条件得求出c1,c2最后得到通解y(n)= c1)n+ c2n)1n+)1n+]一系统的框图如图所示,试求该系统的单位取样响应h(n)和单位阶跃响应解由图可知ßy(n)=x(n)+ βy(n-1)为求单位取样响应,令x(n)=δ(n),于是有h(n)= δ(n)+ βh(n-1)由此得到h(n)=()1nDδβ-=βn u(n)阶跃响应为y(n)=h(n)*u(n)=0nk =∑βk y(k)u(n-k)=111n ββ+--u(n) 设序列x(n)的傅立叶变换为X(e jw ),求下列各序列的傅立叶变换解 (1)F[ax 1(n)+bx 2(n)]=aX 1(e jw )+bX 2(e jw ) (2)F[x(n-k)]=e jwk -X(e jw ) (3)F[e 0jw n x(n)]=X[e 0()j w w -] (4)F[x(-n)]=X(e jw -) (5)F[x *(n)]=X *(e jw -) (6)F[x *(-n)]= X *(e jw ) (7)(8)jIm[x(n)]=12[X(e jw )-X *(e jw -)](9)12πX(e j θ)*X(e jw )(10)j ()jw dx e dw设一个因果的线性非移变系统由下列差分方程描述y(n)-12y(n-1)=x(n)+ 12x(n-1)(1) 求该系统的单位取样响应h(n) (2) 用(1)得到的结果求输入为x(n)=e jwn 时系统的响应 (3) 求系统的频率响应 (4)求系统对输入x(n)=cos(2πn+4π)的响应 解 (1)令X (n )=δ(n),得到h(n)-h(n-1)/2=δ(n)+ δ(n-1)/2由于是因果的线性非移变系统,故由上式得出 h(n)=h(n-1)/2+δ(n)+ δ(n-1)/2 ,n ≥0递推计算出h(-1)=0h(0)=h(-1)/2+δ(0)=1 h(1)=h(0)/2+1/2=1h(2)=h(1)/2=1/2 h(3)=21h(2)=(21)2 h(4)= 21h(2)=(21)3. ..h(n)=δ(n)+ (21)n-1u(n-1) 或 h(n)= (21)n [u(n)-u(n-1)]也可将差分方程用单位延迟算子表示成(1-D)h(n)=(1+D)δ(n)由此得到h(n)=[(1+21D)/(1-21D)]δ(n) =[1+D+21D 2+ (21)2 D 3+…+(21)k-1 D 3+…] δ(n)=δ(n)+ δ(n-1)+ 21δ(n-2)+21δ(n-3)+... +(21)k-1δ(n-1)+…=δ(n)+ (21)n u(n-1)2)将jwn e n X =)(代入)(*)()(n h n x n y =得到(3)由(2)得出 (4)由(3)可知故:()()()[]⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=⎥⎦⎤⎢⎣⎡++=21arctan242cosarg42cosππππneHneHny jwjw某一因果线性非移变系统由下列差分方程描述y(n)-ay(n-1)=x(n)-bx(n-1)试确定能使系统成为全通系统的b值(b≠a),所谓全通系统是指其频率响应的模为与频率ω无关的常数的系统。