电动自行车无刷控制器电路原理分析
电动车无刷控制器原理图

电动车无刷控制器原理图(mc33033) 2007/05/04 01:0048V500W有刷电摩控制器电原理图2007/05/15 17:13几款有刷电动自行车控制器2007/05/14 03:51伟星有刷电机控制器图片看不清者,可以右键另存为在本机上查看一款带继电器的有刷电机控制器ZKC3615MZ有刷电机控制器新旭WMB型24V280W有刷电机控制器电动车充电器原理及维修常用电动车充电器根据电路结构可大致分为两种。
第一种是以u c3842驱动场效应管的单管开关电源,配合LM358双运放来实现三阶段充电方式。
其电原理图和元件参数见图表1点击图片在新窗口查看清晰大图图表1工作原理:220v交流电经T0双向滤波抑制干扰,D1整流为脉动直流,再经C11滤波形成稳定的300V左右的直流电。
U1 为TL3842脉宽调制集成电路。
其5脚为电源负极,7脚为电源正极,6脚为脉冲输出直接驱动场效应管Q1(K1358) 3脚为最大电流限制,调整R25(2.5欧姆)的阻值可以调整充电器的最大电流。
2脚为电压反馈,可以调节充电器的输出电压。
4脚外接振荡电阻R1,和振荡电容C1。
T1为高频脉冲变压器,其作用有三个。
第一是把高压脉冲将压为低压脉冲。
第二是起到隔离高压的作用,以防触电。
第三是为uc3842提供工作电源。
D4为高频整流管(16A60V)C10为低压滤波电容,D5为12V稳压二极管, U3(TL431)为精密基准电压源,配合U2(光耦合器4N35) 起到自动调节充电器电压的作用。
调整w2(微调电阻)可以细调充电器的电压。
D10是电源指示灯。
D6为充电指示灯。
R27是电流取样电阻(0.1欧姆,5w)改变W1的阻值可以调整充电器转浮充的拐点电流(200-300 mA)通电开始时,C11上有300v左右电压。
电动车无刷控制器基本原理

工程技术中心
工程技术中心 • 无刷控制器的结构:
• 控制器铝合金 外壳 • 控制器 引出线 琐紧头
•
控制器 端盖
•
控制器 型号标 贴
工程技术中心
• 控制器功率管 铝合金散热片
•
控制 器功 率管
ቤተ መጻሕፍቲ ባይዱ
•
控制器单片机
工程技术中心
工程技术中心
系统控制原理
工程技术中心
控制器控制及显示原理图
控 制 系 统
电池
仪 表 显 示
电量显示
刹把 转把 巡航开关
速度显示
MCU
反冲电显示
传感器
电机
霍尔传感器
工程技术中心
控制器工作原理图
工程技术中心
控制器部分(MCU),驱动,电机绕组及霍儿位置传感 器
工程技术中心
控制器简介
简略地讲控制器是由周边器件和主芯片(或单片机)组成。周边 器件是一些功能器件,如执行、采样等,它们是电阻、传感器、桥 式开关电路,以及辅助单片机或专用集成电路完成控制过程的器件 ;单片机也称微控制器,是在一块集成片上把存贮器、有变换信号 语言的译码器、锯齿波发生器和脉宽调制功能电路以及能使开关电 路功率管导通或截止、通过方波控制功率管的的导通时间以控制电 机转速的驱动电路、输入输出端口等集成在一起,而构成的计算机 片。这就是电动自行车的智能控制器。无刷直流电机大都采用脉宽调制
工程技术中心
• 4、过载保护 过载保护和过电流保护是相同的,载重超限必然引 起电流超限。电动自行车说明书上都特别注明载重能力,但有的骑行 者或未注意这一点,或抱着试一下的心理故意超载。如果没有这种保 护功能,不一定在哪个环节上引起损伤,但首当其冲的就是开关功率 管,只要无刷控制器功率管烧毁一只,变成两相供电后电动机运转即 变得无力,骑行者立即可以感觉到脉动异常;若继续骑行,接着就烧 毁第2个、第3个功率管。有两相功率管不工作,电动机即停止运行, 有刷电机则失去控制功能。因此,由过载引起的过电流是很危险的。 但只要有过电流保护,载重超限后电路自动切断电源,因超载而引起 的一系列后果都可以避免。 5、限速保护 车速超过某一预定值时,电路停止供电不予助力。 对电动型电动自行车而言,统一规定车速为20km/h,车用电动机在设 计时,额定转速就已经设定好了,控制电路也已经设好。电动自行车 只能在不超过这个速度状态下运行。
常用电动车控制器电路和原理大全

!!电动自行车控制器电路原理分林目前流行的电动自行车、电动摩托车大胡使用直流电机,对直流电机调速的控制器有很多种类。
电动车控制器核心是脉宽调制(PWM)器,而一款完善的控制器,还应具有电冊欠压保护、电机过流保护、剎车撕电、电量显示等功能。
电动车控制器以功率大小可分为大功率、中功率、小功率三类。
电动自行车使用小助率的,货运三轮车和电摩托要使用中功率和大功率的。
从配合电机分,可分为有刷、无刷两大类。
关于无刷控制器,受目前的技术和成本制约,损坏率较高。
笔者认为,无刷控制器维修应以生产厂商为主。
而应用较多的有刷控制器,是完全可以用同类控制器进行直接代换或维修的。
本文分别介绍国内部分具有代表性的电动自行车控制器整机电路,并指出与其他产品的不同之处及其特点。
所列电路均是根稠实物进行测绘所得,图中元件号为笔者所标。
通过介绍具体实例,达到举一反三的目的。
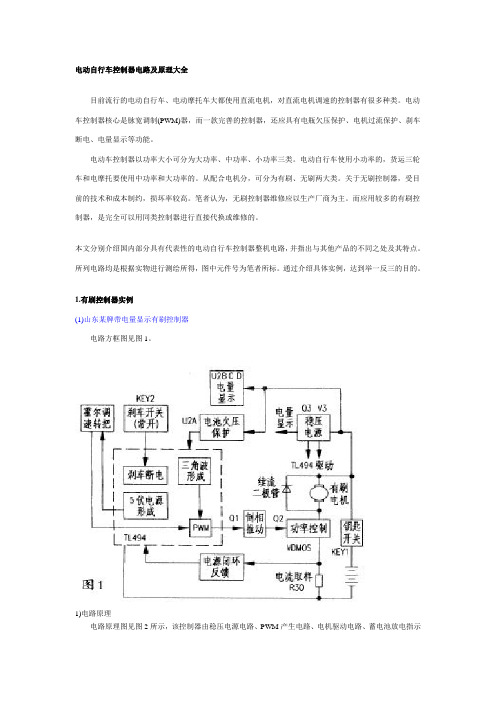
1 •有刷控制器实例⑴XX某牌带电量显示有刷控制器电路方框图见图1。
1)电路原理电路原理图见图2所示,该控制器由稳压电涮电路、PWM 产生电路、电机驱动电路、蓄电池故电指示电路、电机过流 及蓄电池过放电保护电路等组成。
稳压电温由V 3(TL431), Q3等元件组成,从36V 蓄电池经过 串联稳压后得到+12V 电压,给控制电路供电,调节VR6可 校准+12V 电源。
PWM 电路以脉宽调制器TL494为核心组成。
R3、C4 与内部电KH2速转土 -"I 虽示灿 TL494車幼r~~T- 11494"EZVDMOS 电流取样 R30一三—电量033 功率齢I rzu 一电适闭环"路产生振葫,频率大约为12kHz。
H是高变低型霍尔速度控制转把,由松开到旋紧时,其输出端可得到4V—1V的电压。
该电压加到TL494的②脚, 与①脚电压进行比较,在⑧脚得到调宽脉冲。
②脚电压越低, ⑧脚输出的调宽脉冲的低电平部分越宽,电机转速越髙,电位器VR2用于零速调节,调节VR2使转把松开时电机停转再过一点。
无刷电机控制器的原理

∙电动车无刷控制器主要由单片机主控电路、功率管前级驱动电路、电子换向器、霍尔信号检测电路、转把信号电路、欠电检测电路、限流/过流检测电路、刹车信号电路、限速电路、电源电路等部分组成,其原理框图如图所示。
无刷电机控制器的原理∙ 1. 电子换向器无刷电机与有刷电机的根本区别就在于无刷电机用电子换向器代替了有刷电机的机械换向器,因而控制方法也就大不相同,复杂程度明显提高。
在无刷电机控制器中,用6 个功率MOSFET 管组成电子换向器,其结构如图2 所示。
图中MOSFET 管VT1、VT4 构成无刷电机A 相绕组的桥臂,VT3、VT6 构成无刷电机B 相绕组的桥臂,VT5、VT2 构成无刷电机C 相绕组的桥臂,在任何情况,同一桥臂的上下两管不能同时导通,否则要烧坏管子。
6 只功率MOSFET 管按一定要求顺次导通,就可实现无刷电机A、B、C 三相绕组的轮流通电,完成换相要求,电机正常运转。
在电动车无刷电机控制器中,这6 只功率管有二二通电方式和三三通电方式的运用,二二通电方式即每一瞬间有两只功率管同时通电,三三通电方式即每一瞬间有三只功率管同时通电。
对于二二通电方式,功率管须按VT1、VT2;VT2、VT3;VT3、VT4;VT4、VT5;VT5、VT6;VT6、VT1;VT1、VT2 的通电顺序,电机才能正常运转。
对于三三通电方式,功率管须按VT1、VT2、VT3;VT2、VT3、VT4;VT3、VT4、VT5;VT4、VT5、VT6;VT5、VT6、VT1;VT6、VT1、VT2;VT1、VT2 、VT3的次序通电,电机才能正常运转。
2. 功率管前级驱动电路功率管前级驱动电路用来驱动电子换向器的6 个MOSFET 管,由于6 个MOSFET 管组成了3 个相同的桥臂,对这3 个相同的桥臂的驱动电路是相同的,因而功率管前级驱动电路是由3 组相同结构的电路组成,3 所示的是一典型的功率管前级驱图动电路,对于一无刷控制器,有 3 个这样的电路,分别驱动3 个桥臂。
常用电动车控制器电路及原理大全

常用电动车控制器电路及原理大全电动车控制器是一种电子设备,主要用于控制电动车的驱动电机以实现运动控制。
它是电动车的关键部件之一,负责控制车辆的行驶速度、加速度和停止。
本文将介绍几种常用的电动车控制器电路及其工作原理。
1.直流电机控制器直流电机控制器是最常见的电动车控制器之一、它主要由功率电子器件和控制电路组成。
控制电路负责采集并处理外部输入信号(如油门信号),然后通过控制功率电子器件的开关状态,控制电流的大小和方向,进而控制电机的转速和转向。
直流电机控制器可以实现电动车的起动、加速和制动等功能。
2.无刷直流电机(BLDC)控制器无刷直流电机控制器是目前电动车控制器应用最为广泛的一种。
它采用电子换相技术,在电机转子上安装磁铁,通过电子控制器根据转子位置来切换主电源相位以实现换相,从而驱动电机转动。
无刷直流电机控制器具有高效率、低噪音和长寿命等优点,并且可以实现更加精准的速度和转向控制。
3.三相交流电机控制器三相交流电机控制器适用于一些电动车型号,特别是家用和商用电动车。
它利用三相交流电源和功率电子器件对电机进行供电和控制。
三相交流电机控制器可以通过控制不同相位的电流大小和相位差来控制电机的速度和转向。
它具有高效率和高转矩特性,适用于大功率的电动车应用。
4.双向直流电机控制器双向直流电机控制器主要应用于电动车的制动系统。
它可以反向控制电机的旋转方向,实现电动车的倒车和制动功能。
双向直流电机控制器通常采用反电动势检测和电流反馈控制技术,通过控制电机的电流大小和方向来控制车辆的制动力度和倒车速度。
总结起来,常用的电动车控制器电路包括直流电机控制器、无刷直流电机控制器、三相交流电机控制器和双向直流电机控制器等。
它们通过控制电机的电流和相位来实现电动车的速度和转向控制。
不同的电动车类型和应用场景需要使用不同类型的控制器电路,以满足对电机驱动和控制的不同要求。
电动自行车控制器电路及原理大全
电动自行车控制器电路及原理大全目前流行的电动自行车、电动摩托车大都使用直流电机,对直流电机调速的控制器有很多种类。
电动车控制器核心是脉宽调制(PWM)器,而一款完善的控制器,还应具有电瓶欠压保护、电机过流保护、刹车断电、电量显示等功能。
电动车控制器以功率大小可分为大功率、中功率、小功率三类。
电动自行车使用小功率的,货运三轮车和电摩托要使用中功率和大功率的。
从配合电机分,可分为有刷、无刷两大类。
关于无刷控制器,受目前的技术和成本制约,损坏率较高。
笔者认为,无刷控制器维修应以生产厂商为主。
而应用较多的有刷控制器,是完全可以用同类控制器进行直接代换或维修的。
本文分别介绍国内部分具有代表性的电动自行车控制器整机电路,并指出与其他产品的不同之处及其特点。
所列电路均是根据实物进行测绘所得,图中元件号为笔者所标。
通过介绍具体实例,达到举一反三的目的。
1.有刷控制器实例(1)山东某牌带电量显示有刷控制器电路方框图见图1。
1)电路原理电路原理图见图2所示,该控制器由稳压电源电路、PWM产生电路、电机驱动电路、蓄电池放电指示电路、电机过流及蓄电池过放电保护电路等组成。
稳压电源由V3(TL431),Q3等元件组成,从36V蓄电池经过串联稳压后得到+12V电压,给控制电路供电,调节VR6可校准+12V电源。
PWM电路以脉宽调制器TL494为核心组成。
R3、C4与内部电路产生振荡,频率大约为12kHz。
H是高变低型霍尔速度控制转把,由松开到旋紧时,其输出端可得到4V—1V的电压。
该电压加到TL494的②脚,与①脚电压进行比较,在⑧脚得到调宽脉冲。
②脚电压越低,⑧脚输出的调宽脉冲的低电平部分越宽,电机转速越高,电位器VR2用于零速调节,调节VR2使转把松开时电机停转再过一点。
电机驱动电路由Q1、Q2、Q4等元件组成。
电机MOTOR为永磁直流有刷电机。
TL494的⑧脚输出的调宽脉冲,经Q1反相放大驱动VDMOS管Q2。
TL494的⑧脚输出的调宽脉冲低电平部分越宽,则Q2导通时间越长,电机转速越高。
「图解」电动车无刷电机控制器驱动电路图
「图解」电动车无刷电机控制器驱动电路图“旺材电机与电控”提醒您不要走开,文末有福利!·无刷直流电动机的组成与工作原理(1)无刷电动机的组成无刷直流电动机由转子和定子两大部分组成,如图3所示。
(2)无刷直流电动机的工作原理无刷直流电动机采用方波自控式永磁同步电动机,以霍尔传感器取代电刷换向器,霍尔传感器的信号线传递电动机里面磁钢相对于绕组线圈的位根据3个霍尔传感器的信号能知道此时应该怎样给电动机的线圈供电(不同的霍尔信应该给电动机绕组提供相对应方向的电流),也就是说霍尔传感器状态不一样,线圈的置号电流方向不一样。
霍尔信号传递给控制器,控制器通过粗线(不是霍尔线)给电动机绕组供电,电动机旋转,磁钢与绕组(准确地说是缠在定子上的线圈,其实霍尔一般安装在定子上)发生转动,霍尔传感器感应出新的位置信号,控制器粗线又给重新改变电流方向的电动机绕组供电,电动机继续旋转(当绕组和磁钢的位置发生变化时,绕组必须对应地改变电流方向,这样电动机才能继续向一个方向运动,否则电动机就会在某一个位置左右摆动,而不是连续旋转),这个过程就是电子换向。
无刷直流电动机由直流电源供电,借助位置传感器来检测转子的位置,所检测出的信号触发相应的电子换相线路,以实现无接触式换相。
无刷直流电动机用电子开关和位置传感器代替电刷及换向器,将直流电转换成模拟三相交流电,通过调制脉宽,改变其电流大小来改变转速。
直流无刷电机的控制结构直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(P)影响:N=120.F/P。
在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。
直流无刷电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。
也就是说直流无刷电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
电动车无刷控制器电路图(高清)资料
今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1:(原文件名:1.gif)图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:(原文件名:2.gif)图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
(原文件名:3.gif)图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
电动车无刷马达控制器硬件电路详解
电动车无刷马达控制器硬件电路详解本文以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图图1:350W整机电路图整机电路看起来很复杂,我们将其简化成框图再看看:图2:电路框图电路大体上可以分成五部分:一、电源稳压,供应部分;二、信号输入与预处理部分;三、智能信号处理,控制部分;四、驱动控制信号预处理部分;五、功率驱动开关部分。
下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。
图3:PIC16F72在控制器中的各引脚应用图我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT 的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。
内部软件资源我们在软件部分讲解,这里并不需要很关心。
字串1各引脚应用如下:1:MCLR复位/烧写高压输入两用口2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。
正常运转时电压应在0-1.5V左右3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。
正常时电压应在3V以上4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。
5:模拟/数字量输入口:刹车信号电压输入口。
可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。
6:数字量输入口:1+1助力脉冲信号输入口,当骑行者踏动踏板使车前行时,该口会收到齿轮传感器发出的脉冲信号,该信号被单片机接收到后会给电机输出一定功率以帮助骑行者更轻松地往前走。
电动自行车无刷控制器电路原理分析
该控制器由CPU(PIC16F72)、2片74HC27(3输入或非门)、1片74HCO4D(反相器)、1片74HCO8D(双输入与门)和1片LM358(双运放)、6只大功率场效应管等组成,功率达350W,是一款比较典型的无刷电动车控制器,具有600和120°驱动模式自动切换功能。
根据实物绘出其电路图,如图所示。
该控制器由CPU(PIC16F72)、2片74HC27(3输入或非门)、1片74HCO4D(反相器)、1片74HCO8D(双输入与门)和1片LM358(双运放)、6只大功率场效应管等组成,功率达350W,是一款比较典型的无刷电动车控制器,具有600和120°驱动模式自动切换功能。
电路组成及工作原理该电路分为电源电路,信号输入与预处理、智能信号处理控制,驱动控制信号功率驱动开关等三部分。
CPU(PIC16F72)单片机是智能处理控制部分的核心。
PIC16F72的引脚功能描述见304页图中所注。
1.电源电路该控制器有三组电源。
第一组是提供总能源的电池。
板子上的电解电容C1(1OOO μF/63V)、C11(1OOμF/63V)及C1O(μF/63V)用于消除由电源线、电路板走线所带来的电阻、寄生电感等引起的杂波干扰。
由于是工作在大电流、高频率、高温状态下,对电解电容有损耗角小、耐高温的要求,普通的电解电容容易发热爆裂。
第二组电源提供15V电压,一是给场效应管供电,由于场效应管必须有1OV以上、20V以下的电压才能很好地导通,所以必须有合适的电压为其供电,同时15V电压也为5V 稳压块提供预稳压。
稳压块为LM317,输出15V。
由于LM317的输入输出压差不能超过40V,而输入电压(电池电压)可能高达60V,因此在LM317前面加了一只330Ω/2W的电阻。
第三组电源是5V,稳压块采用LM78LO5,由于78LO5的最大输出电流只有1OOmA,所以并联了两只Ω的电阻R75、R76,以扩流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
该控制器由CPU(PIC16F72)、2片74HC27(3输入或非门)、1片74HCO4D(反相器)、1片74HCO8D(双输入与门)和1片LM358(双运放)、6只大功率场效应管等组成,功率达350W,是一款比较典型的无刷电动车控制器,具有600和120°驱动模式自动切换功能。
根据实物绘出其电路图,如图所示。
该控制器由CPU(PIC16F72)、2片74HC27(3输入或非门)、1片74HCO4D(反相器)、1片74HCO8D(双输入与门)和1片LM358(双运放)、6只大功率场效应管等组成,功率达350W,是一款比较典型的无刷电动车控制器,具有600和120°驱动模式自动切换功能。
电路组成及工作原理
该电路分为电源电路,信号输入与预处理、智能信号处理控制,驱动控制信号功率驱动开关等三部分。
CPU(PIC16F72)单片机是智能处理控制部分的核心。
PIC16F72的引脚功能描述见304页图中所注。
1.电源电路
该控制器有三组电源。
第一组是提供总能源的电池。
板子上的电解电容C1(1OOOμ
F/63V)、C11(1OOμF/63V)及C1O(μF/63V)用于消除由电源线、电路板走线所带来的电阻、寄生电感等引起的杂波干扰。
由于是工作在大电流、高频率、高温状态下,对电解电容有损耗角小、耐高温的要求,普通的电解电容容易发热爆裂。
第二组电源提供15V电压,一是给场效应管供电,由于场效应管必须有1OV以上、20V 以下的电压才能很好地导通,所以必须有合适的电压为其供电,同时15V电压也为5V稳压块提供预稳压。
稳压块为LM317,输出15V。
由于LM317的输入输出压差不能超过40V,而输入电压(电池电压)可能高达60V,因此在LM317前面加了一只330Ω/2W的电阻。
第三组电源是5V,稳压块采用LM78LO5,由于78LO5的最大输出电流只有1OOmA,所以并联了两只Ω的电阻R75、R76,以扩流。
系统对5V电源的要求比较高,不单单是因为逻辑电路、CPU等的电源电压都不能过高,而且由于CPU的所有AD转换都是以5V电压为基准,所以若5V不准,会出现电流检测、欠电压检测、手柄控制等均不能达到设计要求的情况,甚至不能动作。
因此,该电压应严格控制在~。
2.信号输入与预处理电路
该电路包括电源电压输入、工作电流比较、放大输入、手柄转把调速电压输入、刹车信号输入、电机转子位置传感器的霍尔信号输入,以及其他功能开关信号输入等。
(1)电源电压输入由于CPU只接收0V~5V的信号,所以电源电压必须经过分压才能输入CPU。
(2)工作电流放大、输入电路康铜丝R55采样的电流信号经过R6送入运放U1A(LM358)同相输入端(5)脚,经过放大,由(7)脚输出至U6(CPU)(2)脚,CPU根据该信号的高低控制PWM脉冲输出的大小,从而控制功率管电流的高低。
UIB(LM358)作为比较器,其输出端(1)脚接CPU(21)脚。
电流正常时,U1B(3)脚电压高于(2)脚,(1)脚输出高电平。
当电流由于某种原因突然增大到一定程度时,(2)脚电压高于(3)脚,(1)脚输出低电平,从而将U6(21)脚过流保护端电位拉低,CPU据此完全关闭电机的输出,进入保
护状态,对控制器输出的最大电流进行限制,以保护电池、控制器、电机等不会出现超过允许范围的大电流,避免故障进一步扩大。
(3)手柄转把输入部分+5V电源加到手柄转把的翟尔元件上,转动手柄转把,霍尔元件产生的~转速控制电压通过R37、R32分压,C27滤波后,输入到U6(5)脚,CPU据此控制驱动PWM信号,实现电机调速。
(4)刹车信号输入经R,34、R33分压,送到刹车信号(低电平有效)CPU(7)脚。
正常行驶时,U6(7)脚为高电平,(13)脚正常输出驱动脉冲;刹车时,U6(7)脚电平被拉低,(13)脚停止驱动脉冲输出,达到刹车断电功能。
(5)电机转子位置传感器输入由于该传感器安装在电机内部,采用开路输出的办法,所以除提供+5V电源外,每个传感器U、V、W都必须接上拉电阻(R49~R51),传感器U、V、W输出的信号经电阻R29~R31、电容C30~C32滤波后,送到U6(15)~(17)脚,CPU根据其信号变化让电机相应绕组通电,从而使电机始终向需要的方向转动。
此外在电源处接有一只二极管D4,接地采用细铜膜做保险丝,以防止电机相线与霍尔信号线短路后高电压反窜进来,损坏板子上的其他零件。
(6)限速控制当限速开关接通时,调速信号经R33对地拉低,从而使转速不能调得太高,以达到限速目的。
(7)电池欠压检测输入电池电压经R3、R11分压,C21滤波后,加到U6(3)脚,CPU 据此信号判断电池电压是否过低。
当电池电压降低到控制器设定值以下时,CPU停止PWM芯片信号的输出,以保护电池不至于在低电压惰况下放电,避免电池因过放电而损坏。
3.驱动控制信号和功率驱动开关
从U6(13)脚输出的PWM占空比驱动控制信号,一路经R53、R52、C71载波(缩小占空比)后输出,相位不变,形成PWM信号,加到与门U4(74CO8D)(13)脚,与U6脚送来的相位开关信号进行逻辑合成,再以一定的逻辑顺序分别从(3)、(6)、(8)脚输出高电平加到三极管Q1~Q3基极,使之导通,驱动T1、T4、T7导通,从而使三组上桥臂场效应V1、V3、V5按一定的逻辑顺序轮流导通工作,将电源电压加至电机绕组。
另一路经R57、C24加到U5(74CO4D)(1)脚,经反相形成PWM信号,由(4)脚输出到或非门U3(74C27D)(2)、(4)、(10)脚,与U6(22)脚同步续流控制端送来的同步续流信号比较后,由(6)、(8)、(12)脚输出到或非门U2(74C27D)(1)、(9)、
(10)脚,与U6(26)~(28)脚送来的相位开关信号进行合成,由或非门U2(6)、(12)、(8)脚分别输出高电平,加到三极管N2、N4、N6基极,使三极管N2、N4、N6导通,从而使三组下桥臂场效应管V2、V4、V6按一定的逻辑顺序轮流导通工作,电流通过电机绕组流回电源负极,从而得到模拟三相交流电,使电机旋转起来。
自检后的状态由LED2显示结果,进行判断。
LED显示情况与控制器状态的对应关系如下:
闪1停1--自检正常通过;闪2停1--欠压:闪3停1-LM358故障;闪4停1--电机霍尔信号故障:闪5停1--下管故障;闪6停1--上管故障;闪7停1--过流保护;闪8停1--刹车保护;闪9停1--手把地线断开;闪10停1--手把信号和手把电源线短路;闪1停11--上电时手把信号未复位。
在检修时,首先要排除短路故障,特别是未级功率管。
在电门锁一侧,可以断开电门锁插接件测电流,若电流约为65mA,则说明控制器前级无短路。
当无短路而电机不转时,应先捡查初始化自检条件是否正常。
检查电机霍尔元件好坏的方法:打开电门锁,用指针式万用表交流1OV挡分别测U6(15)~(17)脚,即电机霍尔的W、V和U相的输入端,用手慢慢转动电机轮,如果表的指针在OV~4V左右波动,说明电机霍尔元件基本正常。
检查控制器前级是否正常的方法:首先控制器应能自检,观索LED2灯闪停是否正常。
若LED2闪一次停一次,说明自检通过,否则应检查自裣灯指示的相关故障电路。
自检正常通过后,用万用表交流1OV挡测U6(26)~(28)脚(即下管换相信号),转动转把使电机轮尽量旋转慢一点,若表针在OV~4V左右波动,再测U6(23)~(25)脚(即上营换相信号),表针应在OV~2V左右波动。
然后测U6(CPU)(13)脚(即PWM输出脚),此点电压随转把的转动而变化,若为OV~,说明U6输出基本正常。
电机电流检测和保护电路由电流取样电阻R5、6和U1等组成。
当无刷电机电流增大到使U1(2)脚电压高于(3)脚约时,U1(1)脚变为低电平,U6(21)脚变为低电平,单片机进入过流保护状态。