美国海军发布无人水面艇主计划
美国海军典型无人水面舰艇一览
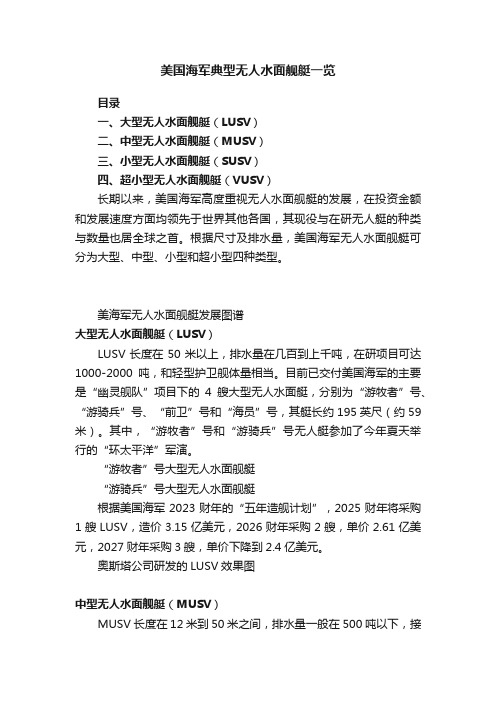
美国海军典型无人水面舰艇一览目录一、大型无人水面舰艇(LUSV)二、中型无人水面舰艇(MUSV)三、小型无人水面舰艇(SUSV)四、超小型无人水面舰艇(VUSV)长期以来,美国海军高度重视无人水面舰艇的发展,在投资金额和发展速度方面均领先于世界其他各国,其现役与在研无人艇的种类与数量也居全球之首。
根据尺寸及排水量,美国海军无人水面舰艇可分为大型、中型、小型和超小型四种类型。
美海军无人水面舰艇发展图谱大型无人水面舰艇(LUSV)LUSV长度在50米以上,排水量在几百到上千吨,在研项目可达1000-2000吨,和轻型护卫舰体量相当。
目前已交付美国海军的主要是“幽灵舰队”项目下的4艘大型无人水面艇,分别为“游牧者”号、“游骑兵”号、“前卫”号和“海员”号,其艇长约195英尺(约59米)。
其中,“游牧者”号和“游骑兵”号无人艇参加了今年夏天举行的“环太平洋”军演。
“游牧者”号大型无人水面舰艇“游骑兵”号大型无人水面舰艇根据美国海军2023财年的“五年造舰计划”,2025财年将采购1艘LUSV,造价3.15亿美元,2026财年采购2艘,单价2.61亿美元,2027财年采购3艘,单价下降到2.4亿美元。
奥斯塔公司研发的LUSV效果图中型无人水面舰艇(MUSV)MUSV长度在12米到50米之间,排水量一般在500吨以下,接近大型巡逻艇的吨位。
1.“海上猎人”无人艇“海上猎人”号无人舰长40米,排水量达140吨、续航力达6200千米、航速最高可达27节(50公里/小时)、可持续执行任务长达30天,专为跟踪无声柴电潜艇设计建造。
据称,该舰是世界上最大的无人驾驶船只。
美军方认为,“海上猎人”号或成为首款可远距离独立航行的无船员船只。
该艇已于2018年服役。
基于“海上猎人”设计的“海鹰”号也已经于2021年进入美海军服役。
“海上猎人”采用三体结构,在不需要加重龙骨的情况下提供了更高的稳定性,但更大的宽度会使机动性降低。
中国在南海当面捞走美军无人潜航器国外无人潜航器最新发展现状

美全国广播公司 (NPR )16 日报道, 本周四 (12 月15 日),中国海军趁美国一艘无人潜航器浮上水面之机, 抢在美 军打捞人员之前将其捞走,事情发生在距离菲律宾苏比克湾 约 50 海里的海上。
美国泰里达因公司研制的斯洛克姆无人水下滑翔机(Slocum glider ) 美国:水下无人滑翔机将用于远海作战 美国海军 学院新闻网 (USNI news ) 今天补充了部分事件细节,据称, 捞走美国无人潜航器的是中国海军“南救 510”号打捞救生船, 该船为中国 922 型救捞船 (北约称“大浪 3”级),该舰当时与美 国正在用无人机进行海底地形探测作业的“鲍迪奇”号海洋调 查船仅 500 码(457.2 米) 。
被捞走的无人水下航行器是“水下 滑翔机”,这是美国最复杂的无人潜航器, 用于进行海洋调查, 上面装有用于探测海底地形的非保密装备。
美媒称捞走 他们水下航行器的就是这艘南救 510 号救捞船 无人潜航器,英文名 Unmannedunderwater vehicle 是没有 人驾驶、靠遥控或自动控制在水下 航行的器具,主要指那 些代替潜水员或载人小型潜艇进行深海探测、救生、排除水 雷等高危险性水下作业的智能化系统。
其实也就是水下机器 人(或其中某种) 。
人潜航器按应用领域,可分为军用与民 用。
在军用领域上,无人潜航器可作为一种新概念武器中无 人作战平台武器。
从这种意义上说,无人潜航器的作用和无 人机作用差不多。
中国在南海当面捞走美军无人潜航器 新发展现状 国外无人潜航器最从外形上看,一些无人潜航器与鱼雷十分相似,那是因为它们可能直接由拆除了炸药的鱼雷改进而来,或者是需要从潜艇的鱼雷发射管中释放,但更多的无人潜航器则针对特定的功能, 具有各自独特的构造。
无论外观怎样,无人潜航器一般都由骨架及浮体、推进系统、航行控制系统以及探测系统等部分组成,一些无人潜航器上还配有机械手等机构。
无人潜航器的发展得益于仿生学的进步,这一点毋庸置疑。
美海军UUV使命任务必要性与技术可行性分析
收稿日期:2010 01 06;修回日期:2010 01 25.作者简介:孙现有(1983-),男,硕士,助理工程师,主要从事水中兵器的检验验收工作.美海军UUV 使命任务必要性与技术可行性分析孙现有, 马 琪(广州局驻七五〇试验场军代室,云南昆明,650051)摘 要:在介绍无人水下航行器发展历史的基础上,从开发成本、技术风险、使用风险和可替代物等方面,详细论述了美国海军2004年无人水下航行器发展主计划中定义的9类使命任务的必要性和技术可行性。
最后,从近期技术发展和军事需求出发,对美国兰德公司提出的无人水下航行器7项近期使命任务进行了分析,认为以上任务均合理可行。
关键词:无人水下航行器(UUV );成本;技术风险;使命;美海军中图分类号:T J630;U 674.941 文献标识码:A 文章编号:1673 1948(2010)03 0231 05Necessity and Technical Feasibility Ana l ysis on the M issionsof Un m anned Under w ater V ehicles i n U S NavySU N X ian y ou, MA Qi(M ilitary R epresentati v e O ffice of G uang zhou Bureau ,stationed i n t he 750T est R ange ,K unm ing 650051,Ch i na)Ab stract :Starti ng w ith t he develop m ental history of un m anned under w ater veh i c l e (UUV ),we fi rst discuss the necessity and techn ica l feasi b ilit y o f the n i ne m issi ons defi ned i n t he 2004m aste r plan o fUUV by U S N avy w ith respect to deve l oping cost ,techn i cal risk ,application r is k ,and a lternatives .T hen w e analyze the seven near term m ilitary m issions of UUV,wh i ch we re recom m ended by t he RAND,i n vie w of the techn i ca l prog ress and m ilitary needs ,and thi nk the m issions are rati onal and feasi ble .K ey word s :unmanned under w ater veh icle(UUV );co st ;techn i ca l risk ;m i ssi on ;U S N avy0 引言无人水下航行器(Unm anned U nder w ater V e h icle ,UUV )是一种以潜艇或水面舰船为支援平台,能够在水下自主远程航行的新概念武器,又被称为水下机器人。
美国海军无人系统项目的最新进展
2 0 ~2 1 财 年 采 购 1 07 0 1 4架 B MS A
UCA 项 目 ,波音公 司与诺 斯罗 S)
无人 机 ,但 在 2 0 0 6~2 1 0 1财年 普 ・ 格鲁 曼公司 为此展 开 了竞 争 。 侦察兵”无人机的近期采办做 出指 示 ,以便能够 向舰 队和舰 队陆战 队 提供一种高度 自动化 的舰载垂直起 降无人机 ,满足海军未来作战 的需 求。报告 还建议海军和海军 陆战队 组成一个V U V的联合开发管理队 T A 伍 ,并邀 请海岸警备队参加 ,确保
1 海 军 无人机 和无 人战 斗机 项 .
目
美 国 海军 发展 的 无人 机 和无 人
i 事 能力 的 要 包括 无 人 机( UAV 、无人 战 战斗 机 主 要用 于 以下 三个 领 域 :. ) 斗机 ( UCA 、无 人 水面 艇 ( V) USV 、 ) 无 人潜 航 器( UUV) 和无 人地 面 车辆
和 生 产 开 发 之 后 终 止 该 项 目 ,不 对
“ 火力侦 察兵” 无人机 进行批 量生
随后要与 空军 的无人 战斗机项 目合 产 。但此后不久海军却食言 ,宣布
( n 捕食者 B”无人机 的 并 , 以使 其 技 术 性 能 达 到 最 优 。 Ma ie ,“ r r 海 军 版 ) 以 及 由
与侦察领域 ,项 目的第一阶段 已经 对 无 人 机 和 无 人 战 斗 机 所 做 的一 份
在 战术侦察 与 目标指 示领域 ,
取得成果 ,海 军部在 2 0 0 3和 2 0 报告 中建议 ,将空军 “ 04 全球鹰 ”项 海军打算采购一型能够从水面作战 财 年 采 购 了 2架 远 程 “ 球 鹰 ” 全
萁无 人 系统 空等 各 个领
云洲:让中国无人船驶向世界

云洲:让中国无人船驶向世界刘启强;宋子夷【期刊名称】《广东科技》【年(卷),期】2018(027)007【总页数】5页(P37-41)【作者】刘启强;宋子夷【作者单位】;【正文语种】中文2008年,以香港科技大学张云飞为核心的创新团队,研制出第一代水质监测无人船样机。
2010年,怀着共同梦想的他们在珠海创立了云洲智能科技有限公司,开始了全新的创新创业历程。
如今,一晃八年过去了,当初十几人的创新团队已经发展到目前250多人的规模,而他们研发的无人船艇更是令国人瞩目。
2013年,云洲推出世界第一艘环境测量无人船产品,并因此获得“第二届全国创新创业大赛”全国总冠军。
2014年,云洲攻克海洋无人艇的技术难关,推出了填补国内空白的海洋高速无人艇样机“领航者”号,使中国继美国、以色列后掌握了海洋无人船的关键核心技术。
2015至2016年,云洲作为唯一企业单位,参与了国家海洋无人艇的顶层设计,并参与完成了南海调查等多个重大国家任务,填补了国家在南沙、西沙部分岛礁地形数据上的空白。
凭借此项任务,云洲与国家海洋局南海调查技术中心共同斩获2016年度海洋科学技术奖特等奖。
2017年,云洲参与了国家对世界“第三极”青藏高原的科学考察。
同年年底,云洲联合中国人民解放军海军测绘研究所、国家海洋局南海调查技术中心研制的“极行者”号海底探测无人艇,伴随“雪龙”号极地科学考察船一路向南,远赴位于罗斯海西岸的难言岛(恩科斯堡岛),出色完成了中国第5座南极考察站建站的锚地水深地形测量工作。
今年年初,云洲81条无人艇编队以不同队形穿过“超级工程”港珠澳大桥,惊艳亮相中央电视台春节联欢晚会。
由此,无人船与无人车、无人机等一道,拉开了无人驾驶时代的大幕。
500吨级无人货船“筋斗云”(效果图)《广东科技》:请首先给我们科普一下无人船有哪些技术优势?云洲:无人船(艇)首次出现在国内公众的视野中,应该是十年前的2008年北京奥运会上。
当时,一艘名为“天象一号”的无人船作为气象应急装备,在青岛举行的奥运帆船赛事上,为大赛提供了气象保障服务。
UUV与AUV国内外发展情况
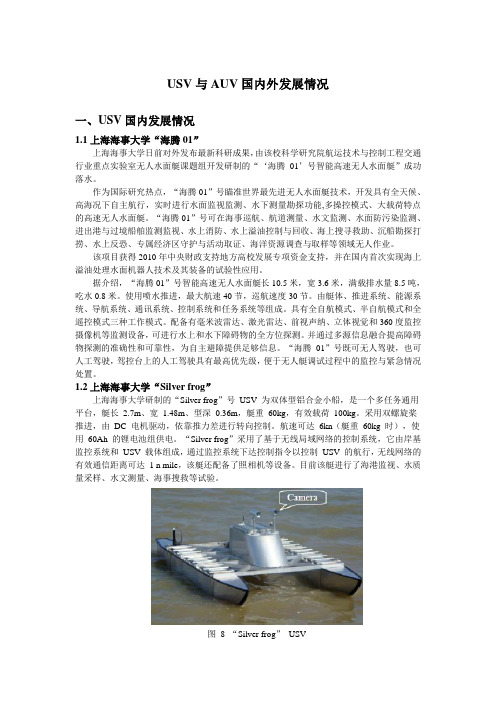
USV与AUV国内外发展情况一、USV国内发展情况1.1上海海事大学“海腾01”上海海事大学日前对外发布最新科研成果,由该校科学研究院航运技术与控制工程交通行业重点实验室无人水面艇课题组开发研制的“‘海腾01’号智能高速无人水面艇”成功落水。
作为国际研究热点,“海腾01”号瞄准世界最先进无人水面艇技术,开发具有全天候、高海况下自主航行,实时进行水面监视监测、水下测量勘探功能,多操控模式、大载荷特点的高速无人水面艇。
“海腾01”号可在海事巡航、航道测量、水文监测、水面防污染监测、进出港与过境船舶监测监视、水上消防、水上溢油控制与回收、海上搜寻救助、沉船勘探打捞、水上反恐、专属经济区守护与活动取证、海洋资源调查与取样等领域无人作业。
该项目获得2010年中央财政支持地方高校发展专项资金支持,并在国内首次实现海上溢油处理水面机器人技术及其装备的试验性应用。
据介绍,“海腾01”号智能高速无人水面艇长10.5米,宽3.6米,满载排水量8.5吨,吃水0.8米。
使用喷水推进,最大航速40节,巡航速度30节。
由艇体、推进系统、能源系统、导航系统、通讯系统、控制系统和任务系统等组成。
具有全自航模式、半自航模式和全遥控模式三种工作模式。
配备有毫米波雷达、激光雷达、前视声纳、立体视觉和360度监控摄像机等监测设备,可进行水上和水下障碍物的全方位探测。
并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主避障提供足够信息。
“海腾01”号既可无人驾驶,也可人工驾驶,驾控台上的人工驾驶具有最高优先级,便于无人艇调试过程中的监控与紧急情况处置。
1.2上海海事大学“Silver frog”上海海事大学研制的“Silver frog”号USV 为双体型铝合金小船,是一个多任务通用平台,艇长2.7m、宽1.48m、型深0.36m,艇重60kg,有效载荷100kg。
采用双螺旋桨推进,由DC 电机驱动,依靠推力差进行转向控制。
航速可达6kn(艇重60kg 时),使用60Ah 的锂电池组供电。
无人艇在海事系统的应用研究
62 C W T 中国水运 2021·03摘 要:随着云计算、人工智能、无线通信等技术的发展,水上安防领域也将迎来智能化的新变革。
无人艇技术提供了颠覆传统海事安全监管手段的智能化解决方案。
作为能够自主航行的水上运动平台,无人艇可以第一视角反馈水域现场的真实场景,在目标水域形成移动的高密度覆盖,在巡航监管、调查取证、人命救助、危管防污等多个领域均可发挥重要的作用。
关键词:无人艇;海事;应用中图分类号:U698 文献标识码:A 文章编号:1006—7973(2021)03-0062-02无人艇在海事系统的应用研究赵显峰,刘胜利(交通运输部规划研究院,北京 100028)DOI 编码:10.13646/ki.42-1395/u.2021.03.0201 研究背景2019年5月,交通运输部联合中央网信办、国家发改委、教育部、科学技术部、工业和信息化部、财政部共同发布了《智能航运发展指导意见》(交海发〔2019〕66号),提出了智能航运发展的战略目标和十大任务。
到2025年,基本形成智能航运发展的基础环境,构建以高度自动化和部分智能化为特征的航运新业态;到2035年,形成以充分智能化为特征的航运新业态;到2050年,形成高质量智能航运体系。
无人艇作为智能航运的重要组成部分,如何在我国水上交通安全监督管理中发挥作用,促使智能船舶乃至智能航运的发展,是海事系统面临的重大机遇与挑战。
2 发展现状随着大数据、人工智能等技术的迅猛发展,制约无人艇发展的技术瓶颈也逐步得以解决,以美国、以色列为主的发达国家在无人艇的研发领域取得了重大突破和快速发展。
美国海军于2002年起合作开发“斯巴达侦察兵”。
2007年,美国海军发布了《海军无人水面艇主计划》,根据无人艇的长度、续航力、任务、布放方式和艇型的要求不同划分了无人艇发展的四个级别。
2003年,由以色列研发的“保护者”号无人艇向以色列国防军交付。
2017年,以色列海军成功测试了“海上骑士”无人艇分队,以期代替现役主力无人艇“保护者”。
美国海军加快“超级蜂群”无人机作战项目开发

美国海军加快“超级蜂群”无人机作战项目开发作者:军鹰智库来源:军鹰动态2022年10月,美国防部预算文件出现此前未披露的“超级蜂群” 无人作战项目,该文件表明美国海军正在加快该项目开发,研究如何建造、部署和控制数以千计的小型无人机,以绝对数量压倒对手防空系统。
一项目简介“超级蜂群”无人机作战项目是美海军的一项保密项目,源于美海军研究院艾萨克·卡米纳教授2016年提出的设想。
“超级蜂群”由水面、水下和空中多模式无人系统组成,无人系统平台可在不同域之间随意切换,规模超过10000艘/架,拥有压倒性数量优势的群体,从而彻底瘫毁对手的态势感知、判断决策能力。
“超级蜂群”构想主要源于自然生物群体,类似于自然界中的蚁群或鸟群,其关键技术是集群算法。
集群中的每个成员都遵循规则行动,则群可保持内聚,不会产生相互碰撞。
这种规则在没有中央控制智能的情况下可使蚁群或蜂群作为一个团队有效地工作。
搞清楚这种规则,就可利用蜂群自身的内部规则控制或击败“超级蜂群”。
“超级蜂群”防御和进攻的关键是如何控制蜂群,尤其是上万架或更多数量的具有极高控制自主性的无人机集群。
“超级蜂群”项目研究起初以海军研究生院卡米纳团队为主导,其研究工作涵盖了针对“超级蜂群”威胁的防御战术,也包含了对进攻性“超级蜂群”的开发活动。
从2016年起,卡米纳团队开展相关战术研究,以保护美海军航空母舰等高价值资产,使其免受伊朗小型无人舰船的袭击。
随着美国将重心转移至印太地区,“超级蜂群”成为美军应对“反介入/区域拒止”战略方案之一。
目前正在开展针对无人“超级蜂群” 的进攻和防御技术和战术研究。
近期海军在预算文件中的计划包括从舰船、潜艇、飞机和地面车辆发射无人集群,集群无人机配备传感器、干扰器或其他电子战设备、弹头等多种有效载荷具备多域作战能力。
“超级蜂群”项目还包括合作规划和分配任务给集群成员,开发更复杂的控制系统,用于有人和自主团队,使人类和集群更易于协同工作,并赋予集群更多的自主权等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
感知技术是一项取得较快发展的技术领域,它直接关系到USV作战,特别是反水雷战、反潜战和水面战。USV对于这一技术领域的需求是,进一步提高区域覆盖率(ACR),提高分类和识别能力和非传统跟踪技术,改进用于探测化学、生物、核、放射性和爆炸威胁的传感器。在满足USV反水雷战任务需求方面,合成孔径声纳(SAS)技术处于领先的地位。SAS技术能够大幅扩展探测区域,并能够提高目标的分辨率,这个特性对于反水雷战模块的开发具有重要意义。此外宽带水声技术也具有提高水雷探测范围的能力。
(3)评估技术要求以及目前的技术准备情况,为USV平台和相关负载的研制提出相应的技术投资策略。
二、USV的作战使命
根据国防部和海军的指导性文件,这份主计划确定了USV优先发展的7个任务领域,按照优先级排列,包括:反水雷战(MCM);反潜作战(ASW);海上安全(MS);水面作战(SUW);支持特种部队作战(SOF);电子战(EW);支持海上拦截作战(MIO)。针对每一项任务领域,研究团队将开发一种USV任务包,这个任务包包括平台尺寸/类型、负载和可能的应用描述等。
“舰队”级(Fleet)USV是一个11米的滑行或半滑行水面艇,在拖曳扫雷具时具有中等航速/续航力,而在支持反潜战、水面战或电子战作战时,“舰队级”级USV能够提供较长的续航力。当移除或替换掉任务模块后,在24小时内,“舰队级”级USV还能支持有人驾驶。
美国海军发布无人水面艇主计划(下)
四、无人水面艇的技术与工程问题
与USV的操控、部署与回收、运输、USV子任务包的布放与回收等问题相关的技术与工程问题可分为两类:第一类是技术本身不能完全支持任务需要;第二类是技术本身是成熟的,但是目前在USV中的应用还不够成熟。其中,可归属到第一类的技术和工程问题包括:自主技术、障碍和碰撞规避、威胁避免、自动目标识别、USV子任务包的自动布放和回收;可归为第二类的技术和工程问题包括:集中控制、武器发射、USV部署与回收。
总之,USV任务的预置程序不可能适应所有任务的动态变化特性,因此USV要能够适应环境和任务的变化。目前,面临的挑战是为USV提供自主的自适应能力,而且未来能力将需要更多无人系统进行自主的、协同作业。
2. 障碍和碰撞规避
除最小的特种任务航行器之外,所有的USV必须具备自主的障碍规避能力。这些障碍具体包括:大面积岸区、船只、低垂的障碍物(例如在近岸作战中遇到的桥梁、树枝等)、浅水障碍(例如沉船、暗礁和沙洲等)、水面障碍物(例如游泳者、浮标、漂浮的残骸等)、USV拖曳系统遇到的水中障碍物等。
1. 自主技术
对于所有的军用、民用或学术领域的无人系统来说,自主控制技术都是一个重要的研究领域。自主技术能够降低USV对于人员和带宽需求,同时扩展超视距作战的战术应用范围,例如,对于海上安全、反潜战和反水雷领域,需要USV长期、独立地运行,并执行长距离航行、探测、评估、危险规避和信息收集等任务。另外,通过自主技术,USV可与多个航行器进行协同作业,这在大规模反潜作战和反水雷战中被视为一项重要的使能能力。提高USV的自主性,需要推动最低层面的信号处理和决策能力,而自主控制水平可根据操作人员的操控频率和复杂性进行衡量。USV必须收集来自传感器的各种数据,自主地识别威胁数据,并做出适当地反应。不可预知的情况或数据信息可能导致航行器放弃任务或改变攻击计划。在提供初始能力时,由于操控人员和航行器之间仍需保持通信联系,因此USV所需的复杂自主技术可能少于其它类型的无人系统。
“X-级”是一个长3米或更小的非标准级USV,采用非标准模块建造,能够支持特种部队作战、以及海上拦截作战任务。它将提供低层次的情报、侦察、监视能力,以及有限的续航力、有效载荷和适航性,支持有人操作。它可通过一个小型有人驾驶的小艇进行布放,例如,11米的刚性充气艇或充气式作战侦察突击艇。
“海港”级(Harbor Class)USV主要是在海军标准7米刚性充气艇基础上研制的,具有中等续航力,主要是执行海上安全任务,拥有较强的情报、监视和侦察能力,并装备了致命和非致命性武器。“海港级”USV具有7米充气艇的标准接口,可由多型舰艇部署。
布放和回收
水面作战
布放
布放
支持特种部队作战
电子战
支持海上拦截作战
布放和回收
布放和回收
6. 集中控制
USV主计划预期USV能力将通过大量不同无人系统联合作战得到有效运用,这就需要一个集中控制方案,降低各种特殊硬件、软件、人员和训练、以及通信系统的分散程度。目前,美国国防部长办公室和各军种无人系统之间的联合互操作标准研究工作还没有启动。但是,海军和国防部长办公室已经启动了“联合无人系统集中控制先期概念技术演示”(JUSC2 ACTD)项目,在无人系统集中控制技术发展方面迈出了第一步。这个先期概念演示项目在濒海战斗舰的0型(Flight 0)上集成了无人航行器集中控制系统,并且增加了联合标准(JAUS & STANAG 4586),但是,JUSC2项目仅是减少了操控人员的数量。目前,海军正在讨论将JUSC2项目转移到统一的集中控制台项目,该项目将为濒海战斗舰、以及其他海军水面和潜艇等平台开发、集成、配置和维护一个统一标准的集成控制台,这个控制台将完全取代用于单独无人航行器的分散控制系统。实现这一最终目标的关键是制定相应的标准,包括互操作性,通信,艇体、机械和电气(HM&E),有效负载的模块化,指挥、控制、通信和计算机(C4)体系结构。
USV部署与回收系统接口的通用性和便携性:
不能排除在其他水面航行器上应用的固有特性
不能对整个主平台的配置造成过大影响
减少主平台速度和作战概念方面的限制
一、USV的发展设想
USV的发展设想是:开发和装备成本节约型的USV,改善海军和联合作战能力,支持本土防御、全球反恐作战、非对称作战和常规战争。为提升USV稳定性和耐波能力,协助打击地区性、跨国界、以及全球范围内的敌人,USV将增大目前和未来的平台。USV将完全实现自动化,从而降低通信/数据交换的需求以及操控人员的负担。此外,USV可通过布放和回收仪器设备,收集、发送和处理各类信息,使美军及其盟军能够以最低的风险或代价攻击目标。
5. USV负载自动布放和回收
USV负载自动布放和回收是一项还未进行开发的技术领域,可能需要很长一段时间才能够完全实施。表1表示了USV任务需要布放和回收的负载类型。
表1 USV任务需要布放和回收的负载
USV任务
需要进行布放和回收的负载
UUV/ROV
USV
导弹
鱼雷
反水雷战
布放和回收
反潜战
布放
海上安全
传感器处理和相关的自主决策技术是USV反水雷战和反潜战任务模块正在开发的技术领域。对于反水雷战模块,主要的技术风险是在识别类似水雷的对象和确定水雷过程中应用的声纳和光学图像自动处理技术。目前,研究团队正在开发第二代自动声纳处理设备,并在特定环境下实现了声纳信号的自动处理。但是,用于识别水雷和水面物体的光学处理技术仅仅处于初始研发阶段。对于USV反潜战任务模块来说,最大的技术挑战主要是在自主处理、目标识别、对抗措施、目标运动分析(TMA)和战术运用等方面。
各种无人系统的武器自主控制技术正通过陆军、海军、空军试验室和美国国防部长办公室“联合地面机器人计划”(JGRE)进行研究。对于近期能力而言,大多数无人系统的武器控制将需要人员参与,以确定正确的打击目标。例如,USV反潜战“杀伤区”或反水雷战“水雷危险区”将依靠人为确定。对于灭雷系统,存在一些特殊的武器发射问题,其中,较为重要的是目标定位精度,灭雷具必须借助低廉的近程传感器定位目标。在开发出可靠的自动目标识别(ATR)算法之前,将需要健壮的、高频带指挥、控制和通信系统来支持人员参与的反水雷战任务。
7. 武器发射
为了完成反水雷战灭雷、反潜作战、水面作战等任务,USV必须携载并发射相应的武器装备。从USV发射武器面临的主要技术挑战是在各种海况条件下稳定地瞄准目标并获得准确的弹道。恶劣的海况可能造成USV平台瞄准(例如舰炮、导弹、非致命性射弹)和武器发射(鱼雷、无人潜航器传感器等)等方面的问题。而对于有人操控的USV,保持通信将是USV面临的一个技术挑战,特别是在超视距(OTH)范围。为满足作战需要,可靠的中距离声通信和自主行为也是必需的。目前,计算机辅助探测和计算机辅助分类技术已经进行了演示,而且计算机辅助识别技术已被认为是或即将成为可应用的技术。
“斯诺科勒”级(Snorkeler)USV是一个7米的半潜式水面艇,在航行过程中,除通气管之外,船体其余部分均在水下。相对于其它水面船体类型,这种作业模式可在7级海况下提供更为稳定的平台。“斯诺科勒”级USV将支持反水雷战拖曳(搜寻)/灭雷任务、反潜作战(海上盾牌),另外还可以充分利用相对隐蔽的外形支持特种作战任务。
三、发展系列USV
在2006年举行的USV主计划专题学术讨论会中,一项重要的结论是,界定USV的类型和尺寸级别将有助于协调舰队和USV采办项目,特别是在舰队兼容性、促进民品开发、集中控制、标准化、通用化、模块化和人员系统集成等方面。对于USV来说,最为重要的技术条件是USV能够被海军现役舰艇搭载,或仅需进行较小的改装,因此,通用的海军船型和尺寸成为首先考虑的因素。USV主计划推荐了一个非标准级的USV和三个标准级的USV,这4种级别的USV能够完全满足美国海军USV优先发展的7个任务领域的能力需求,具体包括:
3. 威胁避免
多数任务领域需要USV具备自主的威胁避免能力,这将涉及舰船、小艇、飞机、主动传感器系统(例如雷达)、以及大范围的被动探测系统。这里需要权衡的是,航行器对于拦截或破坏的易损性,以及USV自我保护组件的复杂性和成本。
4. 自动目标识别
在所有的任务领域,自动目标识别(ATR)有助于障碍规避和威胁避免,并且是完成反水雷战、海上安全、反潜战和水面作战任务的支撑技术之一。ATR是确保USV无需返回母船或依靠人员遥控执行多步骤任务的关键。