国外海军无人水面艇发展及关键技术
美国海军典型无人水面舰艇一览
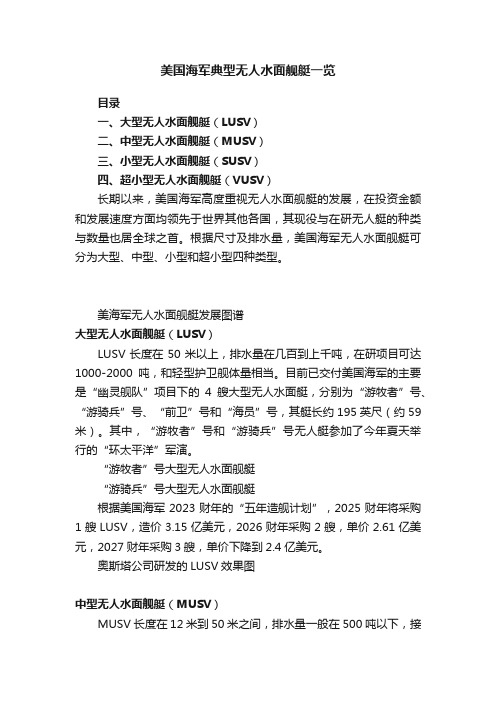
美国海军典型无人水面舰艇一览目录一、大型无人水面舰艇(LUSV)二、中型无人水面舰艇(MUSV)三、小型无人水面舰艇(SUSV)四、超小型无人水面舰艇(VUSV)长期以来,美国海军高度重视无人水面舰艇的发展,在投资金额和发展速度方面均领先于世界其他各国,其现役与在研无人艇的种类与数量也居全球之首。
根据尺寸及排水量,美国海军无人水面舰艇可分为大型、中型、小型和超小型四种类型。
美海军无人水面舰艇发展图谱大型无人水面舰艇(LUSV)LUSV长度在50米以上,排水量在几百到上千吨,在研项目可达1000-2000吨,和轻型护卫舰体量相当。
目前已交付美国海军的主要是“幽灵舰队”项目下的4艘大型无人水面艇,分别为“游牧者”号、“游骑兵”号、“前卫”号和“海员”号,其艇长约195英尺(约59米)。
其中,“游牧者”号和“游骑兵”号无人艇参加了今年夏天举行的“环太平洋”军演。
“游牧者”号大型无人水面舰艇“游骑兵”号大型无人水面舰艇根据美国海军2023财年的“五年造舰计划”,2025财年将采购1艘LUSV,造价3.15亿美元,2026财年采购2艘,单价2.61亿美元,2027财年采购3艘,单价下降到2.4亿美元。
奥斯塔公司研发的LUSV效果图中型无人水面舰艇(MUSV)MUSV长度在12米到50米之间,排水量一般在500吨以下,接近大型巡逻艇的吨位。
1.“海上猎人”无人艇“海上猎人”号无人舰长40米,排水量达140吨、续航力达6200千米、航速最高可达27节(50公里/小时)、可持续执行任务长达30天,专为跟踪无声柴电潜艇设计建造。
据称,该舰是世界上最大的无人驾驶船只。
美军方认为,“海上猎人”号或成为首款可远距离独立航行的无船员船只。
该艇已于2018年服役。
基于“海上猎人”设计的“海鹰”号也已经于2021年进入美海军服役。
“海上猎人”采用三体结构,在不需要加重龙骨的情况下提供了更高的稳定性,但更大的宽度会使机动性降低。
无人水面艇和无人潜艇的发展

无人水面艇和无人潜艇的发展2011-04-17 14:58:20| 分类:战舰精选|字号订阅ECA公司的K-STER无人潜艇可用于侦察和灭雷行动。
德国海军于二战期间进行了无人舰艇试验。
德国人的FL-Boote遥控艇本来设计用来装载炸药以攻击盟军舰艇,但是自1944年以来这些遥控艇是否在作战中获得成功一直未有相关细节披露。
二战期间,无人潜艇的研发也有所进展。
例如,加拿大设计的烟雾施放鱼雷Connox就是为1944年6月的诺曼底登陆行动提供烟雾掩护的手段。
美国海军也曾试验了多种装备了火箭的遥控式登陆艇,包括“豪猪”(Porcupine)、“长橇”(BobSled)、“Woofus-120”等用于在登陆日清除海滩障碍的登陆艇。
但是无人潜艇(UUV)和无人水面艇(USV)的研发随着战争结束而中止,一直到美国海军水雷监测实验室开始研发“雄蜂”(Drone)遥控扫雷系统,此类技术才恢复发展。
与此同时,瑞安航空工业公司(Ryan Aeronautical)也开始研发“火鱼”(Firefish)漂浮靶用于进行射击训练。
到目前为止,美国海军还保留了一定数量的漂浮靶,包括OST-33/-35/-35A Septar漂浮靶、舰船活动靶和高速机动漂流靶。
无人水面艇(USV)成为了海战灭雷行动的标准工具。
对于用户来说,目前有多种无人水面艇和无人潜艇可供选择。
通用动力公司机器人系统分部设计了船身长为11米的“天龙星”(Draco)无人水面艇。
该艇设计可装备多种传感装置,包括吊放声呐和拖曳式阵列声呐、鱼雷发射装置和与母舰或无人水面艇保持联络的通信系统。
这种艇的设计概念是为了研发一种用于反潜战的无人水面艇,可以为监视敌人潜艇活动的特遣队提供支援。
这种舰艇是一种模块化结构,可以装备一定数量由客户指定的系统。
“天龙星”(Draco)还配备了由海军机器人舰船国际公司(MRVI)与AAI公司、海上机器人(SeaRobotics)公司合作研发的拦截装置,这种拦截装置利用一艘船身长6.4米的艇执行高速侦察行动,最高速度可达47节。
水面无人艇发展趋势及关键技术展望
水面无人艇发展趋势及关键技术展望
张韩西子;倪海参;石正坤;刘佳依;上官子柠;王翀
【期刊名称】《舰船科学技术》
【年(卷),期】2024(46)8
【摘要】水面无人艇由于其自主性、机动性和人员低风险等内在特点,已成为支撑未来作战方式向网络化、智能化变革的重要装备。
目前,国内外各大机构都在积极推进无人系统的研究工作,水面无人艇已进入快速发展阶段。
本文对水面无人艇的典型装备及发展阶段进行梳理,并阐述水面无人艇的发展现状、综合技术现状和发展需求,分析提出水面无人艇未来的发展趋势及需突破的关键技术。
【总页数】4页(P108-111)
【作者】张韩西子;倪海参;石正坤;刘佳依;上官子柠;王翀
【作者单位】中国舰船研究院
【正文语种】中文
【中图分类】U674.77
【相关文献】
1.无人水面艇研究现状与发展趋势
2.水面无人艇研究现状与发展趋势
3.无人艇在水面靶标应用与关键技术研究
4.无人水面艇声呐装备现状与发展趋势
5.无人水面艇动力与补能技术的现状及发展趋势
因版权原因,仅展示原文概要,查看原文内容请购买。
水面无人艇艇群技术发展概述

水面无人艇艇群技术发展概述顾颖闽(中国船舶重工集团公司第七一六研究所,江苏连云港 222061)摘要: 本文分析水面无人艇艇群军事行动需求、国外军事应用的技术现状、与其他无人系统集群技术异同点,重点提出了水面无人艇艇群控制系统总体架构、水面无人艇艇群队形自协同控制技术、基于认知智能的水面无人艇艇群智能决策体系、高度人机协同作业等方面水面无人艇艇群关键技术,对水面无人艇艇群技术研究和发展具有一定借鉴意义。
关键词:水面无人艇;艇群;军事应用;技术发展中图分类号:U674;E273 文献标识码:A文章编号: 1672 – 7649(2019)12 – 0035 – 04 doi:10.3404/j.issn.1672 – 7649.2019.12.008Overview of technology development of the USV groupGU Ying-min(Jiangsu Automation Research Institute of CSIC, Lianyungang 222061, China)Abstract: This paper analyzes the USV group of military operation requirements, technical status quo of foreign milit-ary applications, similartities and differences with other unmanned systems cluster technology, puts forward the USV are mainly group control system since the overall architecture, the USV group formation cooperative control technology, based on cognitive intelligent the USV group of intelligent decision-making system, highly human-machine collaborative aspects such as the USV group of key technologies, on the USV group of technology research and development has a certain refer-ence significance.Key words: USV;USV group;military application;technical development0 引 言当今世界正处于新一轮科技革命与产业变革中,人工智能技术、无人技术、新材料技术、生物技术和信息技术等交叉融合,无人化、智能化的装备技术井喷式发展,武器装备正逐步向智能化阶段发展。
国外海洋无人航行器的发展现状及趋势

国外海洋无人航行器的发展现状及趋势来源:溪流之海洋人生作者:代威张雯张沥解春雷惠俊鹏目前,以计算机为代表的信息技术极大地推动了经济、军事、科技等现代社会各领域的变革。
无人航行器的发展已经逐渐得到军事强国的高度重视,美国和欧洲遥遥领先其他国家,引领着无人航行器的发展。
美国国防部自2000年起先后发布了6份无人航行器发展路线图, 2013年12月发布的《2013-2038 年无人航行器综合路线图》,描述了空中、海上、地面无人航行器发展趋势与特点,提出了未来25年美军无人航行器发展的总体思路和具体构建。
在军事领域,以无人舰为代表的海洋无人航行器发展迅速,现已开始大量装备各国军队。
本文对国外海洋无人航行器进行了梳理并对其发展趋势进行分析。
一、水面无人航行器水面无人艇发展至今虽已有70多年的历史,但相较于无人机、无人车系统,水面无人艇还是一个较为陌生的无人系统平台。
水面无人艇是指那些可由水面舰船或岸基布放回收,以半自主或全自主方式在水面航行的无人化、智能化作业平台。
由于在第二次海湾战争时期无人艇的优异表现增加了世界各国海军对无人艇的兴趣,目前,美、英、法、以色列、日本等国都在不断研发先进的高速水面无人艇,以增强其海军战斗力。
从发展现状来看,无人艇的功能集成正在日益增多,船型正在由单体向多体等高性能船舶发展,使用范围也在不断拓展。
目前,无人艇发展典型代表有美国的“Autocat”和“Spartan”无人艇、以色列的“Protector”和“Stingray”无人艇、葡萄牙的“Delfim”无人艇、意大利的“Charlie”无人艇和英国的“Springer”无人艇等。
“Sparatan”无人艇项目由美国主持,联合法国、新加坡共同研制。
“Sparatan”试验艇搭载于“葛底斯堡”号导弹巡洋舰,其参加了波斯湾作战行动后,美国海军部根据其试验结果开始大规模的研制工作,并将其列入濒海战斗舰( Littoral Combat Ship,LCS)的全套武器装备清单中。
水面无人艇研究现状与发展趋势
基础科技船舶物资与市场 130 引言水面无人艇,是一种无人驾驶的水面船舶,主要通过智能控制实现自主驾驶,多用于执行危险且不适宜有人船只执行的任务。
水面无人艇航速较快,部分能达到40 ~50 kn ;具有一定的续航能力,大约能持续航行几百海里,且可以与岸基或母船进行实时通讯,另外水面无人艇上配备先进的武器系统、通讯系统、控制系统以及智能感知系统,使得水面无人艇作战性能更强大,适用性更广泛。
水面无人艇依托母船平台或岸基进行布放和回收,布放后的水面无人艇集群之间能够进行组网和协同作战,这也大大提升水面无人艇编队及整体作战体系的战斗能力[1]。
水面无人艇在军用领域和民用领域都有广泛的应用前景。
本文介绍水面无人艇的组成构架和关键技术,并分析国内外水面无人艇的研究现状和发展趋势。
1 水面无人艇组成水面无人艇主要由艇体、动力与能源系统、导航与控制系统、通信系统、感知/信息采集系统、任务系统等组成,经由地面基站或母船进行控制或信息交换[1]。
艇型是最基本的组成部分,影响水面无人艇的安全性、快速性、平稳性及耐波性等参数,目前许多水面无人艇都在刚性充气艇的基础上进行设计。
常用的材料有铝合金、玻璃纤维等,壳体中间为泡沫夹层,近年研制出的一些水面无人艇采用碳纤维与碳纳米管材料。
导航与控制系统能够实时显示水面无人艇的位置信息,根据这些信息控制水面无人艇的航向、航速,以及在自主模式下实现自动路径规划等。
水面无人艇一般有2种推进方式,分别为螺旋桨和喷水推进。
水面无人艇上安装有水面无人艇研究现状与发展趋势唐杭斌(中国船舶集团有限公司第七一五研究所,浙江 杭州310023)摘 要 :水面无人艇(Unmanned Surface Vehicle ,USV )是一种通过智能控制方式从而实现无人驾驶的水面船舶。
由于其能够长时间执行危险任务,且具有较好的机动性、自主操控性并能够携带一定重量的载荷,被广泛应用于多种水域,以执行反水雷、反潜、情报监视与侦查、环境监测等多种任务。
美国海军无人潜航器发展经验及未来趋势

美国海军无人潜航器发展经验及未来趋势徐依航毫无疑问,世界各国海军都认为水下军用无人系统是未来海战场最有效的作战手段,因此都在积极发展无人潜航器。
美国海军更是视水下无人装备为“反介入/区域拒止”环境下搜集情报、实施力量投送的最有效手段,试图通过大力发展以自主潜航器为主体的水下战无人装备,加强前沿水下无人系统预置,全力推进水下无人区域监控系统布建,突出攻关水下自主导航、通信组网、自主协同等先进技术,打造新型水下作战体系,重点从水下抵消中俄各国的近海综合控制权,限制中俄海军兵力的近海行动自由。
目前,美国海军的无人潜航器主要用于反水雷、监视、情报收集和海洋测量等领域。
预计到2020年,美国海军将拥有无人潜航器1000套左右,2025年可能达到2000套左右,将会逐渐影响我潜艇的作战行动。
主动作为,长期不懈研究早在1957年,美国海军研究局就已经开始研发无人潜航器,它可水下持续运行4个小时。
自20世纪80年代起,民用的无人潜航器在海底勘探和研究领域开始逐步得到应用。
1990年海湾战争期间,因美海军舰船在波斯湾海域遇到严重的水雷威胁,美军加大了使用无人潜航器进行水雷战的研究力度,对续航、通信、自主控制技术等问题开展了深入的集中研究。
1994年,美国海军制定《无人水下计划》,提出优先发展具有水雷探测能力的无人潜航器。
2003年“伊拉克自由行动”期间,美国海军使用REMUS-100无人潜航器在乌姆卡斯尔港口附近完成了航道清扫任务,这是世界上无人潜航器的首次作战运用。
2004年,美国海军发布《水下无人潜航器主体计划》,提出未来无人潜航器的九大优先任务领域:情报、监视与侦察、反水雷战、反潜212018.03军事文摘美国海军MANTA无人潜航器目研发,要求工业部门研制发展可靠、精确、经济可承受的水下导航技术,目的是为潜航器航行稳定提供全天候的精确定位、导航和提供自主任务规划、任务管理等能力。
发展无人系统同类型平台间、不同类型平台间相互协同作用于美军实战的海狐无人水下潜航器。
无人艇应用发展与控制技术
无人艇应用发展与控制技术摘要:面对未来水上作战环境的立体化、多样化、复杂化,无人机/无人艇在充分利用自身优势的基础上,能够通过协同的形式获得作战效能的最大化,无人机/无人艇协同控制为军事领域和民用领域的水上作业提供了新的技术手段。
本文分别对空海跨域协同-机/艇协同概念、国内外无人机/无人艇协同发展现状、无人机/无人艇协同起降技术及无人机/无人艇协同控制的未来发展趋势等方面进行了总结。
关键词:无人艇;应用发展;控制技术引言近年来,无人平台技术获得了世界范围内的广泛重视和深入研究,尤其是无人机技术发展尤为迅猛,并在多个领域实现了成功应用。
无人水面艇与无人机、无人车和无人潜航器同属于四大无人平台成员,受到控制、计算机、人工智能、材料、通信等高新技术的有力推动,近30年来无人水面艇(Unmanned Surface Vehicles, USV)技术发展较快,并被应用于民用及军事领域。
1.无人艇的系统构成及技术1.1系统构成无人艇的架构设计一般划分为监控站(岸基/母舰监控分系统)、无人艇(本体分系统)两大部分。
对于无人艇本体而言,根据任务、功能的不同,无人艇的系统构成主要包括:载体、动力、操纵、控制、感知、通信、导航、载荷、作业、保障等子系统。
基于模块化的设计理念,可将子系统细分为各个功能模块。
无人艇研制中,依据使命任务需求和总体设计方案,分别对各功能模块进行技术攻关、详细设计、软硬件开发,通过系统集成最终构建出具备自主操控、安全航行及特定功能的无人系统。
一种典型的无人艇系统构成图如图1所示,为了保障无人艇有效运行,其中包含约20个子系统(功能模块),显然无人艇是一个非常复杂的系统。
图1 一种典型的无人艇系统构成图无人艇的各个子系统(模块)之间紧密联系,相互支撑、缺一不可。
无人艇遂行任务时,通过远程通信模块实现无人艇与监控站之间的无线信息交互,接收指控指令,并反馈艇载信息(艇体、环境、目标等数据);无人艇的核心是智能控制分系统,它结合艇体姿态、环境感知模块获得环境/目标信息及使命任务,进行任务决策、路径规划、障碍规避、航迹跟踪,甚至协同控制;对于一些军用无人艇,会通过目标感知及态势,启动智能打击及防御模块,对目标进行打击或自身防御。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
国外海军无人水面艇发展及关键技术
文/宋磊 军事文摘 2015年第7期
有人水面舰艇相比,无人水面艇具有机动灵活、隐蔽性好、活动区域广、使
用.成本低等特点。目前,无人水面艇服役数量很少,主要用于执行海上情报、
监视与侦察,反水雷战,电子战等军事任务。未来,随着智能化程度的不断提高,
无人水面艇将具备遂行反潜、反舰作战等能力。
一、无人水面艇自主程度不断提升
与其他无人装备相比,无人水面艇发展相对滞后,但自主程度在不断提升。
自主程度是衡量无人系统先进性的核心指标。无人水面艇按自主程度可分为遥控
型、半自主型和全自主型三类。由于全自主控制方式对智能化程度要求较高、实
现极为困难,尚处于研究探索阶段。目前,各国无人水面艇多采用半自主型。国
外已服役或在研的无人水面艇主要装备型谱见图1。从装备型谱看,全自主型无
人水面艇是未来无人水面艇的发展目标。
二、多功能无人水面艇发展备受关注
目前,开展无人水面艇研制的国家和地区主要包括美国、以色列、欧洲、日
本等,但仅有美国、以色列的部分型号装备了部队。各国正在竞相发展集反水雷
战、反潜战、电子战等能力于一体的多功能无人水面艇。
1.美国B研制并装备多种型号,且制定了明确的发展规划
美国正式服役的无入水面艇主要有“遥控猎雷系统”(RMS)、“海狐”和
“斯巴达侦察兵”。其中,RMS由洛克希德·马丁公司在21世纪初研发成功,
可对水雷进行快速侦察、探测、分类、识别并准确定位,也可用于反潜搜索、水
面监视和沿海情报收集;“海狐”由美国西风海事公司研发,目前在美海军中服
役的主要有“海狐”MKl和“海狐”MK2两型,美海军主要利用该艇进行江河地
区的作战评估,以及远征部队的安全保障等;2002年,美海军水下战中心正式
启动“斯巴达侦察兵”研制计划,2004年法国也加入其中,该艇备受各军种重
视,海军陆战队计划将其用于执行远征后勤和再补给任务,特种部队计划将其用
于水文调查及其他侦察、欺骗任务,陆军计划将“海尔法”等导弹装备该艇执行
精确打击任务,协助内陆湖泊地带作战。目前,“遥控猎雷系统”和“斯巴达侦
察兵”已装备美海军近海战斗舰,参与作战部署。此外,美国于2010年启动“反
潜战持续跟踪无人水面艇”(ACTUV)研制计划。该艇设计长19米,排水量157
吨,最高航速38节(70.4千米/小时),可持续工作30天,一次加油最多可
航行6200千米,采用三体船型,可携带无人潜航器。上述指标均处于国际最领
先的水平,同时也代表着无人水面艇的未来发展方向。
美国无入水面艇的发展思路和顶层规划也十分明确和清晰。21世纪初,美
海军在《21世纪海上力量——海军设想》中提出,在2015年前将新型无人平台
引入未来网络化作战体系中。2007年7月,美海军首次发布《海军无人水面艇
主计划》,设定了无人水面艇的7项使命任务——反水雷战、反潜战、海上安全、
反舰战、支持特种部队作战、电子战和支持海上封锁行动,指明了未来无人水面
艇的发展重点及技术攻关方向。此后,美军方开始统筹各军种无人系统发展,并
统一发布《无人系统路线图》,对无人水面艇的作战需求、关键技术领域以及与
其他无人系统之间的互联互通性进行了总体规划。其中,2013年12月发布的最
新版《无人系统路线图》对无人水面艇“近期(未来5年)、中期(未来10年)、
远期(未来25年)”的技术发展重点和能力需求做出了更细致的说明:无人水
面艇近期的技术发展重点将围绕增强型动力系统、通信系统和传感器系统等方
面,中远期则将重点开发高效自主系统、障碍规避算法以及安全架构等;无人水
面艇近期的能力需求是提高在本地受控区域执行特定任务的自主性并提高联网
能力,中期将扩展行动范围并增加任务类型,远期则可在全球自主执行任务。《无
人系统路线图》提出无人水面艇面临的技术挑战主要包括海上持久能力、恶劣环
境中的生存能力等。同时还指出,为将无人系统潜能最大化,未来各类无人系统
必须实现无缝互操作能力。
2.以色列发展的型号种类仅次于美国,部分型号已装备部队
以色列已开发多种型号,包括拉法尔公司和航空防务系统公司联合开发的
“保护者”、埃尔比特系统公司的“黄貂鱼”和“银色马林鱼”、航空防务系统
公司的“海星”等无人水面艇。其共同特点是充分借鉴无人机技术,并采用模块
化设计。其中“保护者”项目开展最早,发展最为成熟,该艇隐身性高,装备现
代化传感器系统和多样化武器系统,首批12艘已于2006年服役。
3.欧亚多国积极推进研制,产品尚未交付部队
英国在研无人水面艇主要包括“卫兵”、“哨兵”、“黑鱼”等。其中“卫
兵”最为典型,由奎奈蒂克公司研制,采用先进的隐身设计和喷水推进技术,航
速可达50节。法国在研型号主要包括“检察员”MK1、“罗德尔”和“巴西尔”
等,其中“检察员”MK1采用双柴油机喷水推进,最高航速达35节。德国在研
型号为“哨兵”和“近岸攻击无人艇”,其中“哨兵”采用模块化设计,隐身性
和抗沉性好,目前已投入海试。日本发展的无人水面艇主要是UMV-H(高速型)、
UMV-0(海洋型)和OT-91型无人水面艇。其中,OT-91型为最新研制型号,采
用喷水推进,最高航速40节,主要用于海上情报侦察和反水雷等。
三、无人水面艇关键技术有待提高
无人水面艇关键技术主要包括自主规划与控制技术、艇型技术、武器发射控
制技术、布放回收技术等,这些技术都有待进一步提高。而无人水面艇的通信技
术和动力系统可借鉴有人水面舰艇成熟技术。
1.自主规划与控制技术
自主规划与控制技术是无人水面艇核心技术,能够降低无人水面艇对于操控
人员和通信带宽的需求,同时扩展超视距作战的战术应用范围。通过自主技术,
可使无人水面艇在海上安全、反潜战和反水雷战等任务中长期、独立地执行远程
航行、探测、评估、危险规避和信息收集等任务,也可使多个无人水面艇进行协
同作业,提高其在大规模反潜战和反水雷战中的作战效能。目前,美海军正在发
展的无人水面艇自主程度依然较低,需保持与操控人员之间的通信才能顺利工
作。自主水平的提高需要更先进的信号处理和决策技术的支持。就当前的技术水
平而言,无人水面艇的预编程任务尚无法适应外界环境的动态变化。未来面临的
挑战是发展具备自适应能力的无人水面艇,以及多无人水面艇之间的自主、协同
作业。
2.艇型技术
艇型技术是提升无人水面艇快速性和稳定性的关键技术。国外海军装备的无
人水面艇主要采用了半潜式、常规滑行、半滑行、水翼等艇型,但在研型号多采
用常规滑行和半滑行两种艇型。半潜式无人水面艇的大部分艇体在水下,与常规
船体设计相比,兴波阻力较小,平台稳定性高,速度在25节以下。常规滑行无
人水面艇通常采用V型、深V型或M型,综合性能好,拖曳能力强,速度超过
20节,但其艇体阻力对负载分布非常敏感,稳定性较差。半滑行无入水面艇与
常规滑行无入水面艇相比,具有较低的阻力和较高的适航性,耐波性好,是一种
效费比高、稳定的无人水面平台,航速超过30节。水翼艇在所有艇型中阻力最
小、适航性最好,是中等海况下比较稳定的平台,航速超过40节,但缺点是不
适合拖曳且成本较高。其他艇体类型主要包括纯排水型、小水线面双体船、穿浪
型和多体艇型等,这些艇型适合特定需求,通用性较差。美国正在研制的“反潜
战持续跟踪无人水面艇”采用了三体船型,以实现其预期航速和作战任务需求。
3.武器发射控制技术
为执行反水雷战、反潜战、水面战等任务,要求无人水面艇能够携载和投送
武器。目前,无人水面艇武器发射控制面临的主要技术挑战是要求其在各种海况
下都能够可靠地跟踪、瞄准目标并实施攻击。恶劣海况将给无人水面艇带来姿态
难以确定问题,影响其目标瞄准。从各国技术发展情况来看,目前武器发射主要
通过遥控武器站的方式进行控制。如以色列“保护者”无人水面艇装备小型“台
风”遥控武器站,可使用12.7毫米舰炮和40毫米自动榴弹发射器,同时配备全
自动火控系统和可用于昼夜作战的相机,形成了一套完整、全天时的综合无人作
战系统。为满足作战任务需求,无入水面艇武器发射控制技术需进一步提高。
4.布放回收技术
布放回收技术是无人水面艇能否成功运行的关键。当前使用的无人水面艇大
多是以搭载在大型舰艇上的刚性充气艇为基础发展而来,其布放与回收利用了母
舰上现成的吊艇架或坡道进行。该方法适用于低航速、低海况情形,需要人力参
与(如操纵起重机、挂接无人艇等),效率低、危险性大。无人水面艇布放回收
技术面临的挑战包括布放回收作业的安全和可操作性,系统的通用、自主与可移
植性,无人艇与母平台接口间潜在的冲突等。目前,美国在无人水面艇的布放回
收技术方面水平最高,发展最快。美海军已开发了用于布放回收的助力拖曳吊舱,
以及自动导引钩锚系统。美国物理科学公司开发出新型布放回收系统,可使“斯
巴达侦察兵”无人水面艇在母舰速度15-20节航行时实现布放回收操作。另外,
密歇根州航空公司开发出近海战斗舰充气式布放回收系统,可实现高海况、高航
速下对无人水面艇的布放回收。
(责任编辑 张璐璐)