数学专题七第1讲坐标系与参.ppt
人教版七年级数学下册同步用坐标表示地理位置
为处;敌舰C在正东方向,图上距离为1cm处. 小生强态家 园的位位于置县坐城标东记北作方向__5_千__米__处__,__如_图_.表示准确的是( )
40˚
敌方舰 艇B
O 1cm
1cm
˚
敌方 舰艇 C
敌方 舰艇 A
随堂演练
1.如图,若以解放公园为原点建立平面直角坐标系,则博 物馆的坐标为( D ) A.(2,3) B.(0,3) C.(3,2) D.(2,2)
2.如图是天安门广场周围的景点分布示意图的一部分,若表示
“王府井”的点的坐标为(4,1),表示“人民大会堂”的点的坐
小刚家:出校门向东走1500m,再向北走2000m. 小强家:出校门向西走2000m,再向北走3500m,最后向东走500m. 小敏家:出校门向南走1000m,再向东走3000m,最后向南走750m.
1. 根据题意,小刚家,小强家,小敏家的位置均是以学校及东西方 向、南北方向为参照来描述的,故选学校位置为原点. 2. 以正东方向为x轴正方向,以正北方向为y轴正方向.
应尽量使较多的点落在坐标轴上.
获取新知
知识点二:用方位角来表示位置
探究
如图,一艘船在A处遇险后向相 距35 n mile 位于B处的救生船报 警,如何用方向和距离描述救生船 相对于遇险船的位置?
救生船接到报警后准备前往救 援,如何用方向和距离描述遇险船 相对于救生船的位置?
上册微专题七网格坐标系中的旋转作图及旋转证明人教版九级数学全一册优质课件
上册 微专题七 网格(坐标系)中的旋转作图及旋转 证明-20 20秋人 教版九 年级数 学全一 册课件 (共27 张PPT)
∴OC′=OC= 3,B′C′=BC=1,∠B′C′O=∠BCO=90°,
∴点 B′坐标为( 3,-1).
上册 微专题七 网格(坐标系)中的旋转作图及旋转 证明-20 20秋人 教版九 年级数 学全一 册课件 (共27 张PPT)
上册 微专题七 网格(坐标系)中的旋转作图及旋转 证明-20 20秋人 教版九 年级数 学全一 册课件 (共27 张PPT)
如图 3,A 点的坐标为(-1,5),B 点的坐标为(3,3),C 点的坐标为(5, 3),D 点的坐标为(3,-1).小明发现线段 AB 与线段 CD 存在一种特殊关系,即其 中一条线段绕着某点旋转一个角度可以得到另一条线段,你认为这个旋转中心的坐 标是____(1_,__1_)_或__(_4_,__4_) __.
上册 微专题七 网格(坐标系)中的旋转作图及旋转 证明-20 20秋人 教版九 年级数 学全一 册课件 (共27 张PPT)
解:BE=DC. 理由:∵△ABD 是等边三角形, ∴AB=AD,∠BAD=60°, 同理得 AE=AC,∠EAC=60°, ∴以点 A 为旋转中心将△ABE 顺时针旋转 60°就得到△ADC, ∴△ABE≌△等,借此可以在较复杂的图形中发现等量(或全 等)关系,或通过旋转(割补)图形,把分散的已知量聚合起来,便于找到解题突破口, 疏通解题思路.
解:(1)如答图,△A1B1C1 即为所求; (2)如答图,△A2B2C2 即为所求.
上册 微专题七 网格(坐标系)中的旋转作图及旋转 证明-20 20秋人 教版九 年级数 学全一 册课件 (共27 张PPT)
专题1 点的坐标:规律题(解析版)七年级数学下册
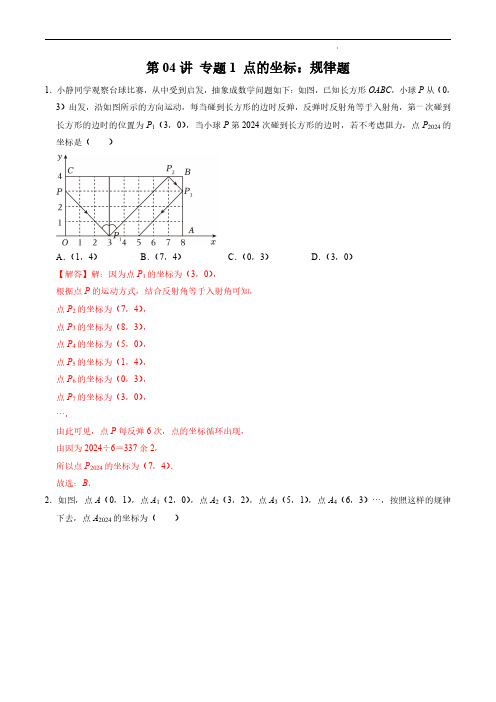
第04讲专题1点的坐标:规律题1.小静同学观察台球比赛,从中受到启发,抽象成数学问题如下:如图,已知长方形OABC,小球P从(0,3)出发,沿如图所示的方向运动,每当碰到长方形的边时反弹,反弹时反射角等于入射角,第一次碰到长方形的边时的位置为P1(3,0),当小球P第2024次碰到长方形的边时,若不考虑阻力,点P2024的坐标是()A.(1,4)B.(7,4)C.(0,3)D.(3,0)【解答】解:因为点P1的坐标为(3,0),根据点P的运动方式,结合反射角等于入射角可知,点P2的坐标为(7,4),点P3的坐标为(8,3),点P4的坐标为(5,0),点P5的坐标为(1,4),点P6的坐标为(0,3),点P7的坐标为(3,0),…,由此可见,点P每反弹6次,点的坐标循环出现,由因为2024÷6=337余2,所以点P2024的坐标为(7,4).故选:B.2.如图,点A(0,1),点A1(2,0),点A2(3,2),点A3(5,1),点A4(6,3)…,按照这样的规律下去,点A2024的坐标为()A.(3035,1011)B.(3036,1011)C.(3035,1013)D.(3036,1013)【解答】解:由题知,点A1的坐标为(2,0);点A2的坐标为(3,2);点A3的坐标为(5,1);点A4的坐标为(6,3);点A5的坐标为(8,2);点A6的坐标为(9,4);点A7的坐标为(11,3);点A8的坐标为(12,5);…,由此可见,点A n的坐标为(),点A n﹣1的坐标为()(n为正偶数);当n=2024时,,,所以点A2024的坐标为(3036,1013).故选:D.3.如图,在平面直角坐标系中,△A1A2A3,△A3A4A5,△A5A6A7,⋯都是斜边在x轴上的等腰直角三角形,点A1(﹣2,0),A2(﹣1,﹣1),A3(0,0),⋯;则根据图示规律,点A1020的坐标为()A.(﹣1,﹣510)B.(2,510)C.(﹣2,510)D.(1,﹣510)【解答】解:由题知,点A1的坐标为(﹣2,0);点A2的坐标为(﹣1,﹣1);点A3的坐标为(0,0);点A4的坐标为(﹣2,2);点A5的坐标为(﹣4,0);点A6的坐标为(﹣1,﹣3);点A7的坐标为(2,0);点A8的坐标为(﹣2,4);…,由此可知,点A4n的坐标为(﹣2,2n)(n为正整数),又因为1020÷4=255,所以2×255=510,所以点A1020的坐标为(﹣2,510).故选:C.4.如图,在平面直角坐标系中,有若干个横纵坐标分别为整数的点,其顺序按图中“→”方向排列,其对应的点坐标依次为(0,0),(1,0),(1,1),(0,1),(0,2),(1,2),(2,2),(2,1),…,根据这个规律,第2023个点的横坐标为()A.44B.45C.46D.47【解答】解:第一个正方形上有4个点,添上第二个正方形后,一共有3×3=9个点,添上第三个正方形后,一共有4×4=16个点,∵添上第44个正方形后,一共有45×45=2025个点,∴第2025个点的坐标是(44,0),∴第2023个点的横坐标为44,故选:A.5.如图,动点M按图中箭头所示方向运动,第1次从原点运动到点(2,2),第2次运动到点(4,0),第3次运动到点(6,4),…,按这样的规律运动,则第2024次运动到点()A.(2024,2)B.(4048,0)C.(2024,4)D.(4048,4)【解答】解:∵第1次从原点运动到点(2,2),第2次运动到点(4,0),第3次运动到点(6,4),第4次从原点运动到点(8,0),第5次运动到点(10,2)……,∴动点M的横坐标为2n,纵坐标按照2,0,4,0四个为一组进行循环,∵2024÷4=504,∴第2023次运动到点(2×2024,0),即:(4048,0);故选:B.6.如图,将边长为1的正方形OAPB沿x轴正方向边连续翻转2023次,点P依次落在点P1,P2,P3,…,P2023的位置,则P2023的横坐标x2023为()A.2021B.2022C.2023D.不能确定【解答】解:从P到P4要翻转4次,横坐标刚好加4,∵2023÷4=505……3,∴505×4﹣1=2019,还要再翻三次,即完成从P到P3的过程,横坐标加3,则P2023的横坐标x2023=2022.故选:B.7.如图,在平面直角坐标系中,动点P从A1(1,0)出发,沿着A1(1,0)→A2(2,0)→A3(2,1)→A4(1,1)→A5(1,2)→A6(3,2)→A7(3,4)→A8(1,4)→A9(1,6)→A10(4,6)→⋯的路线运动,按此规律,则点P运动到A47时坐标为()A.(13,156)B.(1,156)C.(1,144)D.(13,144)【解答】解:由题知,∵A4(1,1),A8(1,4),A12(1,9),…,∴(n为正整数).当n=12时,A48(1,144).再结合点A47和点A48的位置可知,点A47在点A48的右边12个单位长度,∴1+12=13,故点A47的坐标为(13,144).故选:D.8.如图,直角坐标平面xOy内,动点P按图中箭头所示方向依次运动,第1次从点(﹣1,0)运动到点(0,1),第2次运动到点(1,0),第3次运动到点(2,﹣2),…,按这样的运动规律,动点P第2023次运动到点()A.(2023,0)B.(2022,﹣2)C.(2023,1)D.(2022,0)【解答】解:由题意可知,第1次运动到点(0,1)、第2次运动到点(1,0)、第3次运动到点(2,﹣2)、第4次运动到点(3,0)、第5次运动到点(4,1),∴可得到,第n次运动到点的横坐标为n﹣1,纵坐标为4次一循环,循环规律为1→0→﹣2→0→1,∵2023÷4=505......3,∴动点P第2023次运动到点的坐标为(2022,﹣2),故选:B.9.如图,在一个单位为1的方格纸上,△A1A2A3,△A3A4A5,△A5A6A7,…,是斜边在x轴上,斜边长分别为2,4,6,…的等腰直角三角形.若△A1A2A3的顶点坐标分别为A1(2,0),A2(1,﹣1),A3(0,0),则依图中所示规律,A2023的横坐标为()A.﹣1010B.1010C.1012D.﹣1012【解答】解:∵图中的各三角形都是等腰直角三角形,斜边长分别为2,4,6,…∴A1(2,0),A2(1,﹣1),A3(0,0),A4(2,2),A5(4,0),A6(1,﹣3),A7(﹣2,0),A8(2,4),A9(6,0),A10(1,﹣5),A11(﹣4,0),A12(2,6),...总结得出规律:A4n+1(2n+2,0),A4n+2(1,﹣2n﹣1),A4n+3(﹣2n,0),A4n+4(2,2n+2),∵2023=4×505+3,∴点A2023在x轴负半轴上,横坐标为﹣2×505=﹣1010.故选:A.10.如图,在平面直角坐标系中A(﹣1,1),B(﹣1,﹣2),C(3,﹣2),D(3,1),一只瓢虫从点A 出发以2个单位长度/秒的速度沿A→B→C→D→A循环爬行,问第2025秒瓢虫在点()A.(﹣1,0)B.(﹣1,﹣1)C.(﹣1,﹣2)D.(0,﹣2)【解答】解:∵AB+BC+CD+DA=3+4+3+4=14,14÷2=7,∴瓢虫7秒爬行一圈,∵2025÷7=289……2,2×2=4,4﹣3=1,∴第2025秒瓢虫在点(0,﹣2),故选:D.11.如图,动点P在平面直角坐标系中按图中所示方向运动,第一次从原点O运动到点P1(1,1),第二次运动到点P2(2,1),第三次运动到点P3(3,0),第四次运动到点P4(4,﹣2),第五次运动到点P5(5,0),第六次运动到点P6(6,2),按这样的运动规律,点P2023的纵坐标是()A.﹣2B.0C.1D.2【解答】解:观察图象,结合动点P第一次从原点O运动到点P1(1,1),第二次运动到点P2(2,1),第三次运动到点P3(3,0),第四次运动到点P4(4,﹣2),第五次运动到点P5(5,0),第六次运动到点P6(6,2),运动后的点的坐标特点可以发现规律,横坐标与次数相等,纵坐标每6次运动组成一个循环:P1(1,1),P2(2,1),P3(3,0),P4(4,﹣2),P5(5,0),P6(6,2),P7(7,0),P8(8,1)…,∵2023=7×289,∴动点P2023的坐标是(2023,0),∴动点P2023的纵坐标是0,故选:B.12.如图,在平面直角坐标系中,已知点A(1,1)、B(﹣1,1)、C(﹣1,﹣2)、D(1,﹣2),动点P 从点A出发,以每秒2个单位的速度按逆时针方向沿四边形ABCD的边做环绕运动;另一动点Q从点C 出发,以每秒3个单位的速度按顺时针方向沿四边形CBAD的边做环绕运动,则第2023次相遇点的坐标是()A.(﹣1,﹣1)B.(﹣1,1)C.(﹣2,2)D.(1,1)【解答】解:∵点A(1,1)、B(﹣1,1)、C(﹣1,﹣2)、D(1,﹣2),∴AB=CD=1﹣(﹣1)=2,AD=BC=1﹣(﹣2)=3,∴矩形的周长为2×(2+3)=10,由题意,经过1秒时,P、Q在点B(﹣1,1)处相遇,接下来P、Q两点走的路程和是10的倍数时,两点相遇,相邻两次相遇间隔时间为10÷(2+3)=2秒,∴第二次相遇点是CD的中点(0,﹣2),第三次相遇点是点A(1,1),第四次相遇点是点(﹣1,﹣1),第五次相遇点是点(1,﹣1),第六次相遇点是点B(﹣1,1),……,由此发现,每五次相遇点重合一次,∵2023÷5=404⋯⋯3,∴第2023次相遇点的坐标与第三次相遇点的坐标重合,即A(1,1),故选:D.13.如图,在直角坐标系中,一个智能机器人接到的指令是:从原点O出发,按“向上→向右→向下→向右”的方向依次不断移动,每次移动1个单位长度,其移动路线如图所示,第1次移动到点A1,第2次移动到点A2,…第n次移动到点A n,则点A2023的坐标是()A.(1011,0)B.(1012,1)C.(1012,0)D.(1011,1)【解答】解:A1(0,1),A2(1,1),A3(1,0),A4(2,0),A5(2,1),A6(3,1),……,∵2023÷4=505……3,∴点A2023的坐标为(505×2+1,0),∴A2023(1011,0),故选:A.14.如图,将边长为1的正方形依次放在坐标系中,其中第一个正方形的两边OA1,OA3分别在y轴和x轴上,第二个正方形的一边A3A4与第一个正方形的边A2A3共线,一边A3A6在x轴上…以此类推,则点A2022的坐标为()A.(672,﹣1)B.(673,﹣1)C.(674,1)D.(674,0)【解答】解:∵(2022﹣1)÷3=673…2,∴点A2022的坐标为(674,0).故选:D.15.如图,一个机器人从O点出发,向正东方向走3米到达A1点,再向正北方向走6米到达A2点,再向正西方向走9米到达A3点,再向正南方向走12米到达A4点,再向正东方向走15米到达A5点,按如此规律走下去,当机器人走到A6点时,则A6的坐标为()A.(9,15)B.(6,15)C.(9,9)D.(9,12)【解答】解:由题意可知:OA1=3;A1A2=3×2;A2A3=3×3;可得规律:A n﹣1A n=3n,当机器人走到A6点时,A5A6=18米,点A6的坐标是(9,12).故选:D.16.如图,将边长为1的正三角形OAP沿x轴正方向连续翻转2023次,点P依次落在点P1,P2,P3,…,P2023的位置,则点P2023的横坐标为()A.2022B.2023C.2024D.2022.5【解答】解:观察图形结合翻转的方法可以得出P1、P2的横坐标是1,P3的横坐标是2.5,P4、P5的横坐标是4,P6的横坐标是5.5…依此类推下去,∴P3n+1的横坐标为3n+1,P3n+2的横坐标为:3n+1,P3n+3的横坐标为3n+(n为自然数),∵2023=674×3+1,∴点P2023的横坐标为2023.故选:B.二.填空题(共4小题)17.如图,点A(1,0)第一次跳动至点A1(﹣1,1),第二次跳动至点A2(2,1),第三次跳动至点A3(﹣2,2),第四次跳动至点A4(3,2),…,依此规律跳动下去,点A第2024次跳动至点A2024的坐标是(1013,1012).【解答】解:由题知,因为点A的坐标为(1,0),根据点A的运动方式可知,点A1的坐标为(﹣1,1);点A2的坐标为(2,1);点A3的坐标为(﹣2,2);点A4的坐标为(3,2);点A5的坐标为(﹣3,3);点A6的坐标为(4,3);…,由此可见,点A n的坐标为()(n为正偶数),当n=2024时,,=1012,即点A2024的坐标为(1013,1012).故答案为:(1013,1012).18.如图,在平面直角坐标系中,一动点从原点O出发,沿着箭头所示方向,每次移动1个单位,依次得到点P1(0,1),P2(1,1),P3(1,0),P4(1,﹣1),P5(2,﹣1),P6(2,0),…,则点P2024的坐标是(675,1).【解答】解:由图可得,P6(2,0),P12(4,0),…,P6n(2n,0),P6n+1(2n,1),2024÷6=337……2,(2×337+1,1),∴P6×337+2即P2024(675,1),故答案为:(675,1).19.如图,在平面直角坐标系中,有若干个横、纵坐标均为整数的点,按(1,0)→(2,0)→(2,1)→(1,1)→(1,2)→(2,2)→…的顺序用线段依次连接起来.根据这个规律,第50个点的坐标为(8,0).【解答】解:第1圈有1个点:(1,0),第2圈有3个点:(1,0),(2,1),(1,1),前2圈共有1+3=4个点,第3圈有5个点:(2,1),(2,2),(3,2),(3,1),(3,0),前3圈共有1+3+5=9=32个点,第4圈有7个点:(4,0),(4,1),(4,2),(4,3),(3,3),(2,3),(1,3),前4圈共有1+3+5+7=16=42个点,……,前圈共有n2个点,∵50=72+1,∴第50个点再第8圈,是第一个点,其坐标为(8,0),故答案为:(8,0).20.在平面直角坐标系中,若干个等腰直角三角形按如图所示的规律摆放.点P从原点O出发,沿着“O →A1→A2→A3→A4…”的路线运动(每秒一条直角边),已知A1坐标为(1,1),A2(2,0),A3(3,1)A4(4,0)…,设第n秒运动到点P n(n为正整数),则点P2023的坐标是(2023,1).【解答】解:由题意知,A1(1,1),A2(2,0),A3(3,1),A4(4,0),A5(5,﹣1),A6(6,0),A7(7,1),…,由上可知,每个点的横坐标等于序号,纵坐标每6个点依次为:1,0,1,0,﹣1,0这样循环,∵点P从原点O出发,第n秒运动到点P2023,即点A2023,∴P2023(2023,1),故答案为:(2023,1).。
高考数学二轮复习第2部分专题篇素养提升文理专题7选修部分第1讲选修44坐标系与参数方程课件新人教版

典例3 (2020·南平三模)在平面直角坐标系 xOy 中,以原点
O 为极点,以 x 轴正半轴为极轴建立极坐标系,曲线 C 的极坐标方程为
ρ=1-c2os
θ,直线
l1
的参数方程为xy==ttcsions
α α
(t 为参数),π2<α<π,点 A
为直线 l1 与曲线 C 在第二象限的交点,过 O 点的直线 l2 与直线 l1 互相垂 直,点 B 为直线 l2 与曲线 C 在第三象限的交点.
19
1.(2020·中原区校级模拟)在平面直角坐标系 xOy 中,以坐标原点为 极点,x 轴正半轴为极轴建立极坐标系,曲线 C1:ρ=4sin θ,曲线 C2:ρ =4cos θ.
(1)求曲线 C1 与 C2 的直角坐标方程; (2)若直线 C3 的极坐标方程为 θ=π3(ρ∈R),设 C3 与 C1 和 C2 的交点 分别为 M,N,求|MN|.
25
典例2 (2020·河南模拟)在平面直角坐标系 xOy 中,曲线 C
的
参
数
方
程
为
x=2cos α y= 3sin α
(α
为参数),直线
l 的参数方程为
x=1+tcos α y=tsin α
(t 为参数).
(1)求曲线 C 和直线 l 的一般方程;
(2)已知点 P(1,0),直线 l 和曲线 C 交于 A,B 两点,若|PA|·|PB|=152,
14
典例1 (2020·沙坪坝区校级模拟)在平面直角坐标系 xOy 中, 以原点 O 为极点,x 轴正半轴为极轴,建立极坐标系,曲线 C1 的极坐标
方程为
ρ=2acosθ,曲线
C2
的极坐标方程为
7.3坐标系与参数方程PPT课件
考点二 参数方程与普通方程的互化
例 2 (1)(2013·江苏)在平面直角坐标系 xOy 中,直线 l 的参数
方
程
为
x=t+1, y=2t
(t
为参数),曲线
C 的参数方程为
本 讲 栏
x=2tan2θ, y=2tan θ
(θ 为参数).试求直线 l 和曲线 C 的普通方程,
目 开
并求出它们的公共点的坐标.
因此 M(cos α+cos 2α,sin α+sin 2α).
热点分类突破
专题七 第3讲
M 的轨迹的参数方程为
本
x=cos α+cos 2α, y=sin α+sin 2α
(α 为参数,0<α<2π).
讲
栏 目
②M 点到坐标原点的距离
开
关 d= x2+y2= 2+2cos α(0<α<2π).
当 α=π,d=0,故 M 的轨迹过坐标原点.
∴e=
ac22=
3b32-b2 b2=
23=
6 3.
热点分类突破
专题七 第3讲
(2)在平面直角坐标系 xOy 中,以原点 O 为极点,x 轴为极轴
本 讲
建立极坐标系,曲线
C1
的参数方程为x=tan1 φ, y=tan12φ
(φ 为参
栏
目 数),曲线 C2 的极坐标方程为 ρ(cos θ+sin θ)=1,若曲线 C1
P、Q
都在曲线
C:xy==22scions
t, t
(t 为参数)上,对应参数分别为 t=α 与 t=2α(0<α<2π),M 为
本 PQ 的中点.
讲 栏
①求 M 的轨迹的参数方程;
【新】高考数学二轮复习专题七选修系列第1讲坐标系与参数方程课时规范练文

第1讲 坐标系与参数方程(选修4-4)1.(2017·江苏卷)在平面坐标系xOy 中,已知直线l 的参数方程为⎩⎪⎨⎪⎧x =-8+t ,y =t 2(t 为参数),曲线C 的参数方程为⎩⎨⎧x =2s 2,y =22s (s 为参数).设P 为曲线C 上的动点,求点P 到直线l 的距离的最小值.(导学号 55410137)解:由⎩⎪⎨⎪⎧x =-8+t ,y =t 2消去t ,得l 的普通方程为x -2y +8=0,因为点P 在曲线C 上,设点P (2s 2,22s ). 则点P 到直线l 的距离d =|2s 2-42s +8|5=2(s -2)2+45,所以当s =2时,d 有最小值45=455. 2.(2016·北京卷改编)在极坐标系中,已知极坐标方程C 1:ρcos θ-3ρsin θ-1=0,C 2:ρ=2cos θ.(1)求曲线C 1,C 2的直角坐标方程,并判断两曲线的形状; (2)若曲线C 1,C 2交于A ,B 两点,求两点间的距离. 解:(1)由C 1:ρcos θ-3ρsin θ-1=0, 所以x -3y -1=0,表示一条直线. 由C 2:ρ=2cos θ,得ρ2=2ρcos θ. 所以x 2+y 2=2x ,则(x -1)2+y 2=1, 所以C 2是圆心为(1,0),半径为1的圆. (2)由(1)知,点(1,0)在直线x -3y -1=0上, 因此直线C 1过圆C 2的圆心.所以两交点A ,B 的连线段是圆C 2的直径, 因此两交点A ,B 间的距离|AB |=2r =2.3.(2017·全国卷Ⅲ)在直角坐标系xOy 中,直线l 1的参数方程为⎩⎪⎨⎪⎧x =2+t ,y =kt (t 为参数),直线l 2的参数方程为⎩⎪⎨⎪⎧x =-2+m ,y =m k(m 为参数).设l 1与l 2的交点为P ,当k 变化时,P 的轨迹为曲线C .(1)写出C 的普通方程;(2)以坐标原点为极点,x 轴正半轴为极轴建立极坐标系,设l 3:ρ(cos θ+sin θ)-2=0,M 为l 3与C 的交点,求M 的极径.解:(1)直线l 1:⎩⎪⎨⎪⎧x =2+t ,y =kt (t 为参数)化为普通方程y =k (x -2).① 直线l 2化为普通方程x +2=ky .② 联立①,②消去k ,得x 2-y 2=4(y ≠0). 所以C 的普通方程为x 2-y 2=4(y ≠0). (2)将直线l 3化为普通方程为x +y =2, 联立⎩⎨⎧x +y =2,x 2-y 2=4得⎩⎪⎨⎪⎧x =322,y =-22,所以ρ2=x 2+y 2=184+24=5,所以与C 的交点M 的极径为 5.4.(2017·西安调研)已知曲线C 的参数方程为⎩⎪⎨⎪⎧x =2+2cos θ,y =2sin θ(θ为参数),以坐标原点O 为极点,x 轴的正半轴为极轴建立极坐标系,直线l 的极坐标方程为ρsin ⎝ ⎛⎭⎪⎫θ+π6=4.(导学号 55410138)(1)写出曲线C 的极坐标方程和直线l 的直角坐标方程;(2)若射线θ=π3与曲线C 交于O ,A 两点,与直线l 交于B 点,射线θ=11π6与曲线C 交于O ,P 两点,求△PAB 的面积.解:(1)由⎩⎪⎨⎪⎧x =2+2cos θ,y =2sin θ(θ为参数),消去θ.普通方程为(x -2)2+y 2=4.从而曲线C 的极坐标方程为ρ2-4ρcos θ=0,即ρ=4cos θ,因为直线l 的极坐标方程为ρsin ⎝⎛⎭⎪⎫θ+π6=4,即32ρsin θ+12ρcos θ=4,所以直线l 的直角坐标方程为x +3y -8=0.(2)依题意,点A ⎝ ⎛⎭⎪⎫2,π3,B ⎝⎛⎭⎪⎫4,π3,联立射线θ=11π6与曲线C 的极坐标方程可得,P ⎝ ⎛⎭⎪⎫23,11π6.所以|AB |=2,所以S △PAB =12×2×23sin ⎝ ⎛⎭⎪⎫π3+π6=2 3.5.(2016·全国卷Ⅱ)在直角坐标系xOy 中,圆C 的方程为(x +6)2+y 2=25. (1)以坐标原点为极点,x 轴正半轴为极轴建立极坐标系,求C 的极坐标方程;(2)直线l 的参数方程是⎩⎪⎨⎪⎧x =t cos α,y =t sin α(t 为参数),l 与C 交于A ,B 两点,|AB |=10,求l 的斜率.解:(1)由x =ρcos θ,y =ρsin θ可得圆C 的极坐标方程为ρ2+12ρcos θ+11=0.(2)在(1)中建立的极坐标系中,直线l 的极坐标方程为θ=α(ρ∈R).设A ,B 所对应的极径分别为ρ1,ρ2,将l 的极坐标方程代入C 的极坐标方程是ρ2+12ρcos α+11=0.于是ρ1+ρ2=-12cos α,ρ1ρ2=11.|AB |=|ρ1-ρ2|=(ρ1+ρ2)2-4ρ1ρ2=144cos 2α-44. 由|AB |=10得cos 2α=38,tan α=±153.所以l 的斜率为153或-153. 6.(2017·长郡中学联考)在平面直角坐标系xOy 中,直线l 的参数方程为⎩⎪⎨⎪⎧x =1+t cos α,y =1+t sin α(t 为参数,0≤α<π),以坐标原点O 为极点,x 轴的正半轴为极轴,并取相同的长度单位,建立极坐标系,曲线C 1:ρ=1.(1)若直线l 与曲线C 1相交于点A ,B ,点M (1,1),证明:|MA |·|MB |为定值; (2)将曲线C 1上的任意点(x ,y )作伸缩变换⎩⎨⎧x ′=3x ,y ′=y后,得到曲线C 2上的点(x ′,y ′),求曲线C 2的内接矩形ABCD 周长的最大值.解:(1)由ρ=1得ρ2=1,所以曲线C 1的直角坐标方程为x 2+y 2=1.①又直线l 的参数方程为⎩⎪⎨⎪⎧x =1+t cos α,y =1+t sin α,代入①式得t 2+2t (cos α+sin α)+1=0.所以t 1t 2=1,由参数t 的几何意义,得|MA |·|MB |=|t 1t 2|=1.(2)由⎩⎨⎧x ′=3x ,y ′=y 得曲线C 2:x 23+y 2=1.所以曲线C 2的参数方程为⎩⎨⎧x =3cos θ,y =sin θ.不妨设点A (m ,n )在第一象限,θ∈⎝⎛⎭⎪⎫0,π2.利用对称性,矩形ABCD 的周长为4(m +n )=4(3cos θ+sin θ)=8sin ⎝ ⎛⎭⎪⎫θ+π3≤8,当θ=π6时,等号成立,故周长最大值为8.7.(2016·全国卷Ⅰ)在直角坐标系xOy 中,曲线C 1的参数方程为⎩⎪⎨⎪⎧x =a cos t ,y =1+a sin t(t 为参数,a >0).在以坐标原点O 为极点,x 轴正半轴为极轴的极坐标系中,曲线C 2:ρ=4cos θ.(1)说明C 1是哪一种曲线,并将C 1的方程化为极坐标方程;(2)直线C 3的极坐标方程为θ=α0,其中α0满足tan α0=2,若曲线C 1与C 2的公共点都在C 3上,求a .解:(1)消去参数t 得到C 1的普通方程x 2+(y -1)2=a 2,C 1是以(0,1)为圆心,a 为半径的圆.将x =ρcos θ,y =ρsin θ代入C 1的普通方程中,得到C 1的极坐标方程为ρ2-2ρsin θ+1-a 2=0.(2)曲线C 1,C 2的公共点的极坐标满足方程组⎩⎪⎨⎪⎧ρ2-2ρsin θ+1-a 2=0,ρ=4cos θ. 若ρ≠0,由方程组得16cos 2θ-8sin θcos θ+1-a 2=0, 由已知tan θ=2,得16cos 2θ-8sin θcos θ=0, 从而1-a 2=0,所以a =1(a >0).当a =1时,极点也为C 1,C 2的公共点,在直线C 3上. 所以实数a =1.8.(2017·乐山二模)在平面直角坐标系xOy 中,直线l 的参数方程为⎩⎪⎨⎪⎧x =1+t cos θ,y =t sin θ(t 为参数,0≤θ<π),以坐标原点O 为极点,x 轴的非负半轴为极轴建立极坐标系,圆C的极坐标方程为ρ=-4cos α,圆C 的圆心到直线l 的距离为32.(导学号 55410139)(1)求θ的值;(2)已知P (1,0),若直线l 与圆C 交于A ,B 两点,求1|PA |+1|PB |的值.解:(1)由直线l 的参数方程为⎩⎪⎨⎪⎧x =1+t cos θ,y =t sin θ(t 为参数,0≤θ<π),消去参数t ,可得:x sin θ-y cos θ-sin θ=0.圆C 的极坐标方程为ρ=-4cos α,即ρ2=-4ρcos α. 所以圆C 的普通坐标方程为x 2+y 2+4x =0, 则C (-2,0).所以圆心C (-2,0)到直线l 的距离d =|-2sin θ-sin θ|sin 2 θ+cos 2θ=3sin θ. 由题意d =32,即3sin θ=32,则sin θ=12,因为0≤θ<π,所以θ=π6或θ=5π6. (2)已知P (1,0),点P 在直线l 上,直线l 与圆C 交于A ,B 两点,将⎩⎪⎨⎪⎧x =1+t cos θ,y =t sin θ代入圆C 的普通坐标方程x 2+y 2+4x =0,得(1+t cos θ)2+(t sin θ)2+4(1+t cos θ)=0, 所以t 2+6t cos θ+5=0.设A ,B 对应参数为t 1,t 2,则t 1+t 2=-6cos θ,t 1·t 2=5, 因为t 1·t 2>0,t 1,t 2是同号.所以1|PA |+1|PB |=1|t 1|+1|t 2|=|t 1|+|t 2||t 1t 2|=335.。
第七章平面直角坐标系专题《巧用面积法求坐标》教案

2.引导与启发:在讨论过程中,我将作为一个引导者,帮助学生发现问题、分析问题并解决问题。我会提出一些开放性的问题来启发他们的思考。
-在解决实际问题时,例如“已知矩形的对角线顶点坐标,求矩形的另一个顶点坐标”,学生需要学会抓住关键信息,忽略次要信息,建立正确的数学模型。难点在于引导学生如何从复杂的实际问题中提炼出关键信息,进行有效建模。
本节课的教学难点与重点是紧密围绕课本内容,注重培养学生解决实际问题的能力。在教学过程中,教师需针对这些难点与重点进行有针对性的讲解和指导,确保学生能够透彻理解并掌握本节课的知识。
-能够将实际问题转化为数学模型,运用面积法求解坐标:培养学生建立数学模型解决问题的能力,将所学知识应用于解决实际问题。
举例解释:
-在讲解面积法求解坐标时,重点强调三角形的面积计算公式,以及如何将这个公式应用于坐标求解。
-通过示例题,如“已知三角形ABC的三个顶点坐标,求顶点D的坐标(D点在坐标轴上)”,引导学生掌握将实际问题转化为数学模型的过程。
3.重点难点解析:在讲授过程中,我会特别强调面积法的基本原理和坐标与面积的关系这两个重点。对于难点部分,我会通过实际例题和图形分析来帮助大家理解。
(三)实践活动(用时10分钟)
1.分组讨论:学生们将分成若干小组,每组讨论一个与面积法求坐标相关的实际问题。
2.实验操作:为了加深理解,我们将进行一个简单的实验操作。通过操作,演示面积法的基本原理。
3.成果分享:每个小组将选择一名代表来分享他们的讨论成果。这些成果将被记录在黑板上或投影仪上,以便全班都能看到。
初三年级上册数学专题07网格(坐标系)中的旋转作图及旋转证明(典题精析)

微专题七__网格(坐标系)中的旋转作图及旋转证明__[学生用书A30]一网格(坐标系)中的旋转作图(教材P62习题23.1第4题)如图1,分别画出△ABC绕点O逆时针旋转90°和180°后的图形.图1解:如答图,△A1B1C1是△ABC绕点O逆时针旋转90°后的图形;△A2B2C2是旋转180°后的图形.教材母题答图【思想方法】网格(坐标系)中旋转作图的一般步骤:①找出原图形中的关键点;②确定旋转中心、旋转角及旋转方向;③根据旋转的性质作出关键点的对应点;④按原图的关键点连接顺序连接作出的所有点,并标上相应字母.[2018·青岛]如图2,将线段AB绕点P按顺时针方向旋转90°,得到线段A′B′,其中点A,B的对应点分别是点A′,B′,则A′点的坐标是(D)图2A.(-1,3)B.(4,0)C.(3,-3)D.(5,-1)[2017·威海]如图3,A点的坐标为(-1,5),B点的坐标为(3,3),C 点的坐标为(5,3),D点的坐标为(3,-1).小明发现线段AB与线段CD存在一种特殊关系,即其中一条线段绕着某点旋转一个角度可以得到另一条线段,你认为这个旋转中心的坐标是__(1,1)或(4,4)__.图3【解析】先根据点A,B的坐标建立坐标系,当A和C,B和D为对应点时,如答图①,旋转中心是(1,1);当A和D,B和C为对应点时,如答图②,旋转中心是(4,4).变形2答图[2017·齐齐哈尔]如图4,平面直角坐标系内,小正方形网格的边长为1个单位长度,△ABC的三个顶点的坐标分别为A(-3,4),B(-5,2),C(-2,1).(1)画出△ABC关于y轴对称的图形△A1B1C1;(2)画出将△ABC绕原点O逆时针方向旋转90°得到的△A2B2C2.图4变形3答图解:(1)如答图,△A1B1C1即为所求;(2)如答图,△A2B2C2即为所求.二旋转证明(教材P63习题23.1第10题)如图5,△ABD,△AEC都是等边三角形.BE与DC有什么关系?你能用旋转的性质说明上述关系成立的理由吗?图5解:BE=DC.理由:∵△ABD是等边三角形,∴AB=AD,∠BAD=60°,同理得AE=AC,∠EAC=60°,∴以点A为旋转中心将△ABE顺时针旋转60°就得到△ADC,∴△ABE≌△ADC,∴BE=DC.【思想方法】旋转前后的图形全等,借此可以在较复杂的图形中发现等量(或全等)关系,或通过旋转(割补)图形,把分散的已知量聚合起来,便于找到解题突破口,疏通解题思路.[2017·舟山改编]如图6,一副含30°和45°角的三角板ABC和DEF叠合在一起,边BC与EF重合,BC=EF=12cm(如图①),点G为边BC(EF)的中点,边FD与AB相交于点H,此时线段BH的长是__12(3-1)cm__.现将三角板DEF绕点G按顺时针方向旋转60°(如图②),则点H的初位置与旋转后的末位置间的距离是__(12-63)cm__.(结果保留根号)图6变形1答图【解析】如答图,作HM⊥BC于M,设HM=x,则MC=x,BM=3x,∴x+3x=12,解得x=6(3-1),BH=2x=12(3-1)cm;当三角板DEF绕点G按顺时针方向旋转60°时,点F恰好落在AB上的点H1处,△CGH1为等边三角形,作H1N⊥BC于N,则GH1=6cm,NH1=33cm,BH1=63cm,HH1=BH1-BH=63-12(3-1)=(12-63)cm.如图7,将一个钝角三角形ABC(其中∠ABC=120°)绕点B顺时针旋转得到△A1BC1,使得C点落在AB边延长线上的点C1处,连接AA1.图7(1)写出旋转角的度数;(2)求证:∠A1AC=∠C1.解:(1)旋转角的度数为60°;(2)证明:∵∠ABC=∠A1BC1=120°,∴∠ABA1=∠CBC1=60°,∴∠A1BC=60°.∵AB=A1B,∴△ABA1是等边三角形,∴∠AA1B=∠A1BC=60°,∴AA1∥BC,∴∠A1AC=∠C.∵△ABC≌△A1BC1,∴∠C=∠C1,∴∠A1AC=∠C1.[2018·绍兴]小敏思考解决如下问题:原题:如图8①,点P,Q分别在菱形ABCD的边BC,CD上,∠P AQ=∠B,求证:AP=AQ.图8(1)小敏进行探索,若将点P,Q的位置特殊化:把∠P AQ绕点A旋转得到∠EAF,使AE⊥BC,点E,F分别在边BC,CD上,如图②,此时她证明了AE=AF.请你证明.(2)受以上(1)的启发,在原题中,添加辅助线:如图③,作AE⊥BC,AF⊥CD,垂足分别为E,F.请你继续完成原题的证明.(3)如果在原题中添加条件:AB=4,∠B=60°,如图①.请你编制一个计算题(不标注新的字母),并直接给出答案(根据编出的问题层次,给不同的得分).解:(1)证明:在菱形ABCD中,∠B+∠C=180°,∠B=∠D,AB=AD,∵∠EAF=∠B,∴∠C+∠EAF=180°,∴∠AEC+∠AFC=180°,∵AE⊥BC,∴∠AEB=∠AEC=90°,∴∠AFC=∠AFD=90°,∴△AEB≌△AFD,∴AE=AF.(2)证明:∵∠PAQ=∠B,∴∠C+∠P AQ=180°,∴∠APC+∠AQF=180°,∵∠APC+∠APE=180°,∴∠AQF=∠APE,又∵∠AEP=∠AFQ=90°,AE=AF,∴△AEP≌△AFQ,∴AP=AQ.(3)不唯一,举例如下:层次1:①求∠D的度数.答案:∠D=60°.②分别求∠BAD,∠BCD的度数.答案:∠BAD=∠BCD=120°.③求菱形ABCD的周长.答案:16.④分别求BC,CD,AD的长.答案:4,4,4.层次2:①求PC+CQ的值.答案:4.②求BP+QD的值.答案:4.③求∠APC+∠AQC的值.答案:180°.层次3:①求四边形APCQ的面积.答案:4 3.②求△ABP与△AQD的面积和.答案:4 3.③求四边形APCQ周长的最小值.答案:4+4 3.[2018·烟台]【问题解决】一节数学课上,老师提出了这样一个问题:如图9①,点P是正方形ABCD内一点,PA=1,PB=2,PC=3,你能求出∠APB的度数吗?小明通过观察、分析、思考,形成了如下思路:思路一:将△BPC绕点B逆时针旋转90°,得到△BP′A,连接PP′,求出∠APB 的度数;思路二:将△APB绕点B顺时针旋转90°,得到△CP′B,连接PP′,求出∠APB 的度数.(1)请参考小明的思路,任选一种写出完整的解答过程.【类比探究】(2)如图②,若点P是6正方形ABCD外一点,P A=3,PB=1,PC=11,求∠APB 的度数.图9解:(1)选思路一:如答图①,将△BPC绕点B逆时针旋转90°,得到△BP′A,连接PP′,∵PB=P′B=2,∠P′BP=90°,∴PP′=22,∠BPP′=45°.又∵AP′=CP=3,AP=1,∴AP2+P′P2=1+8=9=P′A2,∴∠APP′=90°,∴∠APB=45°+90°=135°.变形4答图(2)如答图②,将△BPC绕点B逆时针旋转90°,得到△BP′A,连接PP′,∵PB=P′B=1,∠P′BP=90°,∴PP′=2,∠BPP′=45°.又∵AP′=CP=11,AP=3,∴AP2+P′P2=9+2=11=P′A2,∴∠APP′=90°,∴∠APB=90°-45°=45°.观察可知每2次变换,A点向左平移1个单位,故A2018为A向左平移1009个单位,即A2-20172,。