有轨巷道堆垛机
物流技术堆垛机介绍(PPT35张)
物流技术
一、概念
堆垛机是立体仓库中最重要的起重运 输设备,是代表立体仓库特征的标志。 运用这种设备的仓库最高可达40m。大 多数在10~25m之间。 主要用途是在立体仓库的巷道间来回 穿梭运行。将位于巷道口的货物存入货 格。或将货格中的货物取出运送到巷道 口。这种设备只能在仓库内运行。还需 配备其他设备让货物出入库。
物流技术
三、桥式堆垛机
桥式堆垛机具有起重机和叉车的双重结构特点,像起重机 一样,具有桥架和回转小车。桥架在仓库上方运行,回转 小车在桥架上运行。 货架和仓库顶棚之间需要有一定的空间,保证桥架的正常 运行。立柱可以回转,保证工作的灵活性。回转小车根据 需要可以来回运行,因此桥式堆垛机可以服务于多条巷道。 桥式堆垛机的堆垛和取货是通过取物装置在立柱上运行实 现的,因为立柱高度的限制,桥式堆垛机的作业高度不能 太高。桥式堆垛机主要适用于12米以下中等跨度的仓库, 巷道的宽度较大,适于笨重和长大件物料的搬运和堆垛。
物流技术
原理
由行走电机通过驱动轴带动车轮在下导轨上做水平 行走。由提升电机带动起升滚筒及载货台做垂直升降 运动,载货台升降导向是依靠货台两侧设置的导向轮,在 堆垛机两根立柱上下运动来实现的。由载货台上的货 叉作伸缩运动。通过上述三维运动可将指定货位上的 货物取出或将货物送到指定的货位。 行走认址器用于控制堆垛机水平行走位置, 提升认址 器用于控制堆垛机载货台升降位置,货叉下面的行程开 关控制货叉伸出的距离,接近光电开关控制货叉的回中 位置。通过认址器及光电开关的识别,以及光通讯信号 的转化,实现计算机控制,也可实现机上控制盘的手动和 半自动控制。
物流技术
性能参数
1、起重量和载荷参数 额定起重量Gn: 货物和托盘的质量的总和。
立体仓库巷道式堆垛机设计
立体仓库巷道式堆垛机设计摘要:随着经济的发展,有轨巷道堆垛机作为立体仓库的核心设备,应用越来越广泛。
我国物流业的蓬勃发展,对有轨巷道堆垛机的性能提出了更高的要求。
综合比较了几种升降方案后,升降装置采用钢丝绳卷筒式,其结构简单,受力明确,用户也比较熟悉。
安全防坠器、高度限位装置作为有轨巷道堆垛机的安全保护装置,当有轨巷道堆垛机遇到突发事故时它可以防止载货台坠落事故的发生,保证人员及货物的安全。
安全防坠器采用楔块式制动,灵敏度高、可靠性好、结构简单、能够有效地防止载货台坠落事故的发生。
货叉采用带有行程倍增机构的三级伸缩货叉,货叉收回时,其本身的长度远小于堆垛机运行巷道的宽度,货叉进行存取货物时,货叉的行程远远大于巷道的宽度。
关键词:有轨巷道堆垛机三级伸缩货叉安全防坠器毕业设计外文摘要Design of a railroad aisle stacking cranein stereoscopic warehouseAbstractWith the development of economic, railroad aisle stacking crane is the core equipment of stereoscopic warehouse, it has become more widespread in recent years.Higher demands are also asked for the performance and reliability of the railroad aisle stacking crane.After the synthesis has compared several kind of constructions elevators overall plan, uses the steel wire to hoist the type, its structure simple, the stress is clear about, the users also familiar. The security guards against falling,highly the spacing installment takes the construction elevator the safekeeping of security installment which can avoid the falling of the cage to assure the people and goods safety as soon as the construction hoist meets accident.The security guards which make use of wedge block for brake. This safety anti-falling device have high sensitivity,good reliability,simple configuration and easy to test,which can availably avoid the failing accident of the cage.The Fork trip with a double body is a three-tier telescopic fork, when fork is recovered, the length of its own is far less than the width of roadway, when accessing to goods, the fork is much longer than the width of roadway.Keywords:railroad aisle stacking crane three-tier telescopic fork security guards目次1 绪论 (1)1.1有巷轨道堆垛机的发展 (1)1.2有轨巷道堆垛机的类型 (1)1.3有轨巷道堆垛机的发展现状及特点 (3)2 有巷轨道堆垛机总体方案的确定 (5)2.1有轨巷道堆垛机功能分析 (5)2.2.立柱模块的设计 (7)2.3行走机构模块 (8)2.4起升机构模块 (9)2.5载货台模块 (9)2.6载货台断绳保护装置 (10)2.7货叉机构模块 (13)3 有轨巷道堆垛机基型产品设计 (14)3.1立柱模块设计 (14)3.2行走机构模块 (18)3.3起升装置的选择计算 (21)3.4货叉机构模块设计 (23)结论 (30)参考文献 (31)致谢 (33)1 绪论1.1有巷轨道堆垛机的发展有轨巷道堆垛机是随着立体仓库的出现而发展起来的专用起重机, 通常简称为堆垛机。
巷道堆垛机的安全保护装置
巷道堆垛机的安全保护装置摘要:介绍了堆垛机的结构组成和工作原理,从机械装置和电气控制两个方面阐述了巷道堆垛机的安全保护措施。
关键词:堆垛机安全保护装置自动化立体仓库由于具有空间利用率高、生产效率高,采用计算机进行控制管理,有利于企业实现现代化管理等优点,已成为企业物流和生产管理不可缺少的仓储技术。
巷道堆垛机是自动化立体仓库的核心设备。
作为一种起重机械,它在巷道内高速运行.为避免对人身、设备及货物造成威胁,其在机械和电气方面需要具有非常完善的安全保护措施。
1 巷道堆垛机结构本文研究的巷道堆垛机为单立柱式、下部支撑、下部驱动的有轨巷道堆垛机,由金属结构(包括上、下横梁及立柱)、载货台、运行机构、起升机构、货叉伸缩机构、超速保护装置、过载及松绳保护装置、电气控制装置等部件组成(参见图1)。
结构紧凑是它的一大特点。
在很小的空间内,堆垛机需要在三个相互垂直方向上(运行、起升和货叉伸缩)按照一定的顺序组合进行往复运动。
通过这些运动,完成对货物单元的入、出库搬运作业。
1、运行机构2、电气装置3、起升机构4、立柱5、载货台6、货叉伸缩机构7、限速防坠装置8、上横梁9、过载及松绳保护装置图1 单立柱巷道堆垛机结构图1.1金属结构是堆垛机的主要承载构件之一,它由立柱、上横梁、下横梁三部分组成。
1.1.1立柱是载货台垂直升降的支撑部件,其两侧装有垂直导轨,以保证载货台平稳、灵活地升降;立柱上装有起升机构、过载及松绳保护装置、限速防坠装置、载货台升降的上下极限限位开关等电气元件;动力电缆及控制电缆均通过立柱内腔。
1.1.2上横梁由钢板焊接而成,它上部装有起升用的定滑轮和支撑堆垛机的上部导向轮组。
钢丝绳通过这些滑轮及载货台上的动滑轮,使载货台能上升或下降。
1.1.3下横梁由钢板焊接而成,是堆垛机的主要支撑部件。
下横梁上装有运行驱动车轮组、从动车轮组、下部水平轮组及夹轨器等装置。
还装有红外通讯、电气控制柜及运行限位开关组等电气装置。
JB 5319.2—91 有轨巷道堆垛起重机 安全规范
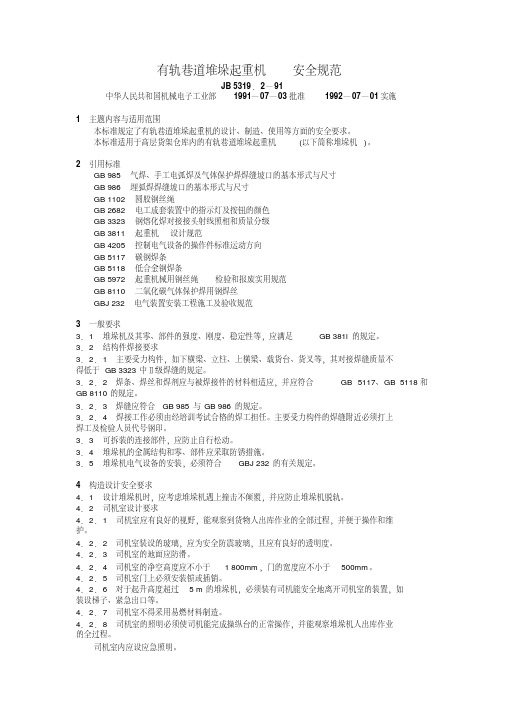
有轨巷道堆垛起重机安全规范JB 5319.2—91中华人民共和国机械电子工业部1991—07—03批准1992—07—01实施1 主题内容与适用范围本标准规定了有轨巷道堆垛起重机的设计、制造、使用等方面的安全要求。
本标准适用于高层货架仓库内的有轨巷道堆垛起重机(以下简称堆垛机)。
2 引用标准GB 985 气焊、手工电弧焊及气体保护焊焊缝坡口的基本形式与尺寸GB 986 埋弧焊焊缝坡口的基本形式与尺寸GB 1102 圆股钢丝绳GB 2682 电工成套装置中的指示灯及按钮的颜色GB 3323 钢熔化焊对接接头射线照相和质量分级GB 3811 起重机设计规范GB 4205 控制电气设备的操作件标准运动方向GB 5117 碳钢焊条GB 5118 低合金钢焊条GB 5972 起重机械用钢丝绳检验和报废实用规范GB 8110 二氧化碳气体保护焊用钢焊丝GBJ 232 电气装置安装工程施工及验收规范3 一般要求3.1 堆垛机及其零、部件的强度、刚度、稳定性等,应满足GB 381l的规定。
3.2 结构件焊接要求3.2.1 主要受力构件,如下横梁、立柱、上横梁、载货台、货叉等,其对接焊缝质量不得低于GB 3323中Ⅱ级焊缝的规定。
3.2.2 焊条、焊丝和焊剂应与被焊接件的材料相适应,并应符合GB 5117、GB 5118和GB 8110的规定。
3.2.3 焊缝应符合GB 985与GB 986的规定。
3.2.4 焊接工作必须由经培训考试合格的焊工担任。
主要受力构件的焊缝附近必须打上焊工及检验人员代号钢印。
3.3 可拆装的连接部件,应防止自行松动。
3.4 堆垛机的金属结构和零、部件应采取防锈措施。
3.5 堆垛机电气设备的安装,必须符合GBJ 232的有关规定。
4 构造设计安全要求4.1 设计堆垛机时,应考虑堆垛机遇上撞击不倾覆,并应防止堆垛机脱轨。
4.2 司机室设计要求4.2.1 司机室应有良好的视野,能观察到货物人出库作业的全部过程,并便于操作和维护。
有轨巷道式堆垛机机械结构的研究

有轨巷道式堆垛机机械结构的研究有轨巷道式堆垛机机械结构的研究引言:随着物流行业的快速发展,堆垛机在仓储装卸作业中起着关键作用。
有轨巷道式堆垛机(AS/RS)是一种高度自动化的设备,可以实现自动化存储和检索货物。
机械结构是有轨巷道式堆垛机的核心部分,对于其运行稳定性、效率和安全性具有重要影响。
本文将探讨有轨巷道式堆垛机机械结构的研究现状,并对其发展趋势进行展望。
一、有轨巷道式堆垛机机械结构的现状1.1 单立柱型结构单立柱型结构是最常见的有轨巷道式堆垛机结构之一。
其具有结构简单、制造成本低等优点,但存在载荷能力有限、受力不均匀等缺点。
1.2 双立柱型结构双立柱型结构通过增加立柱数量提高了堆垛机的稳定性和工作效率。
其适用于大型堆垛机和高负载情况,但制造和安装难度较大。
1.3 桁架型结构桁架型结构是一种近年来较为流行的有轨巷道式堆垛机机械结构。
其具有结构刚性好、自重轻、稳定性高等优点,适用于高速堆垛机和大跨径情况。
二、有轨巷道式堆垛机机械结构的优化与改进2.1 结构刚性的优化有轨巷道式堆垛机在高速运行时,机械振动和变形会对其运行稳定性产生不利影响。
为了提高结构刚性,可以通过增加支撑点、加强关键节点等方式进行优化。
同时,在结构设计中采用优化算法进行优化,以求得更优的结构刚性。
2.2 堆垛机轨道的设计与改进堆垛机轨道是承载并导向堆垛机运动的重要部分。
为了提高堆垛机的稳定性和运行效率,可以采用闭合型轨道结构,增加辅助导向装置,使得堆垛机在运动过程中更加平稳。
2.3 悬臂结构的优化悬臂结构是堆垛机的重要组成部分,直接影响到其抓取货物的能力和稳定性。
通过对悬臂结构的优化,可以提高其刚性和强度,增加载荷能力和工作效率。
三、有轨巷道式堆垛机机械结构的发展趋势3.1 智能化随着信息技术的不断发展,有轨巷道式堆垛机逐渐向智能化方向发展。
通过引入自动识别、无线通信等技术,提高堆垛机的自动化程度和智能化水平,进一步提升其效率和安全性。
堆垛机设计-毕设论文
题目:堆垛机设计(机械部分)专业:机械设计制造及其自动化学生:(签名)指导教师:(签名)摘要本文主要是有轨堆垛机的机械部分设计,包含堆垛机的行走机构、升降机构、伸缩机构的设计,其中重点放在了行走机构的设计上。
根据比较选择了单立柱堆垛机,在进行机构的设计时,根据电机确定机构的总体结构,再由运行阻力计算行走电机的功率,进而确定电机型号。
本设计升降轨道采用双柱型轨道,结构简单工艺性好,货叉伸缩机构借鉴了抽屉轨道的原理。
根据设计要求对各主要部件初步选型后再对部件进行强度的校核,来保证选择的合理性。
在本文最后部分,对该堆垛机的刚性和稳定性进行了较为详细的分析,从而保证了堆垛机工作时运行的平稳性和可靠性。
关键词:有轨堆垛机,行走机构,双柱型轨道Subject:The Design of the mechanical structure of a Stacker CraneAbstractThis paper describes the design of the mechanical structure , including the walking、lifting、stretch outing and draw backing mechanism of a stacker crane, in my design work I focus on the design of the walking mechanisms. According to the comparison we choice the single pillar stacker , In the design of the mechanism ,we according to he motor institutions determine the general structure of a stacker crane, Then cording the resistance to calculation traveling motor power and determine the motor model. Tracking the movement double column type orbit. Structure is simple and good in usability. The goods for the expansion institutions fork drawer the principle of orbit. According to the design requirements of the main components of preliminary selection, then to parts of checking intensity. to ensure that the choice of rationality . In the last part of this paper , the stacker strength and stability for a more detailed analysis , so as to ensure the smoothness of work stacker slide may run and reliability .Keywords: stacker crane, walking mechanism, double column type orbit目录1 绪论 (1)1.1有轨巷道堆垛机的发展: (1)1.2有轨巷道堆垛机的类型: (2)1.3有轨巷道堆垛起重机的发展趋势和研究意义: (3)2 堆垛机的结构设计 (5)2.1堆垛机的总体结构: (5)2.2起重重量 (5)2.3水平载荷 (6)2.4载荷状态 (6)2.5循环寿命 (6)3 行走机构设计方案 (8)3.1行走机构总体方案的确定 (8)3.2行走运行机构布置的主要问题 (8)3.3行走机构功率的确定于电机的选择 (9)3.3.1轨道及车轮 (9)3.3.2车轮踏面的疲劳强度校核 (9)3.3.2 主动行走轮直径的确定 (11)3.3.3 运行阻力计算 (12)3.4行走轮主轴的设计计算 (15)3.4.1 同步带传动设计计算 (15)3.4.2轴的设计计 (18)4 堆垛机伸缩机构设计 (22)4.1伸缩机构的方案确定 (22)4.2货叉传动装置的选型 (22)4.3货叉传动齿轮、齿条的计算 (23)5 升降机构的设计 (28)5.1升降机构的总体选型 (28)5.1.1定机构的工作级别 (28)5.1.2计算钢丝绳最大静拉力并选择钢丝绳 (28)5.1.3确定最小的卷绕直径 (29)5.1.4选择电动机并验算制动力矩 (30)5.2卷筒的设计 (31)6 堆垛机稳定性计算 (35)6.1堆垛机稳定性分析 (35)6.2运行中立柱挠度的计算 (35)6.2.1 立柱的相关计算 (35)6.2.2堆垛机外载荷计算 (35)6.2.2 堆垛机静态刚度的分析 (38)6.2.3 堆垛机结构强度计算 (40)6.2.4 整体稳定性计算 (42)结论 (43)致谢 (43)参考文献 (44)1 绪论我们熟知的轨巷道堆垛机是随着立体化仓库的发展而发展起来的专用起型重机,通常我们称之简称为:堆垛机。
堆垛机术语

堆垛机类型1. 有轨巷道堆垛机storage/retrieval machine SRM2. 地面支撑型有轨巷道堆垛机floor supported storage/retrieval machine3. 悬挂型有轨巷道堆垛机suspended storage/retrieval machine4. 货架支撑型有轨巷道堆垛机rack supported storage/retrieval machine5. 单元型有轨巷道堆垛机unit load storage/retrieval machine6. 拣选型有轨巷道堆垛机order picking storage/retrieval machine7. 拣选-单元混合型有轨巷道堆垛机storage/retrieval machine for both unit load and orderpicking8. 自动有轨巷道堆垛机automatic storage/retrieval machine9. 单立柱有轨巷道堆垛机single mast storage/retrieval machine10. 双立柱有轨巷道堆垛机double mast storage/retrieval machine11. 直线型有轨巷道堆垛机straightly travelling storage/retrieval machine12. 曲线型有轨巷道堆垛机curve negotiating storage/retrieval machine性能主要参数13. 起重量lifting capacity14. 额定起重量load lifting capacity , rated capacity , safe working load15. 总起重量total suspended load , suspended load capacity16. 堆垛机总重量total mass of S/R machine17. 堆垛机设计重量design mass of S/R machine18. 轮压wheel load堆垛机尺寸参数19. 起升高度load-lifting height20. 下降深度load-lowering height21. 起升范围lifting range22. 整机全长overall length23. 整机全宽overall width24. 整机全高overall height25. 货叉中心距distance between two telescopic shuttles26. 货叉宽度width of shuttles27. 货叉长度length of shuttles与堆垛机运行速度有关的参数28. 起升(下降)速度load-lifting(-lowering) speed29. 起升(下降)高速度high load lifting/lowering speed30. 微升降速度low load lifting(-lowering) speed31. 水平运行速度horizontal travelling speed32. 水平运行高(中,低)速度high (medium , low) horizontal travelling speed33. 货叉伸缩速度extending (retracting) speed of shuttle34. 货叉伸缩高(低)速度high (low) extending (retracting) speed of shuttle35. 起升时间lifting time36. 水平运行时间horizontal travelling time37. 货叉伸出时间time of shuttle movement38. 起升加速度lifting acceleration39. 水平运行加速度horizontal travelling acceleration40. 货叉伸缩加速度acceleration of shuttle movement41. 货叉零位neutral position of shuttle与堆垛机运行路线有关的参数42. 运行轨道标高travelling runways level43. 轮轴距base44. 制动距离braking distance , bracking path45. 弯轨转弯半径curvature radius of track系统性能参数46. 作业循环operation cycle47. 单一作业循环single operation cycle48. 复合作业循环compound operation cycle49. 工作周期operation cycle time50. 平均作业循环时间average of operating cycle time51. 工作级别classification group52. 堆垛机工作级别classification group of S/R machine53. 机构工作级别classification group of mechanisms54. 入出库能力productivity55. 货叉伸出最大行程maximum distance of shuttle /maximum extension of shuttle56. 货叉伸出高度thickness of extended part of shuttle57. 货叉下绕度deflexion of shuttle58. 货叉上表面水平度levelness of top surface of shuttle59. 立柱垂直度verticality of mast60. 水平停准精度precision of horizontal positioning61. 垂直停准精度precision of vertical positioning62. 启动时间starting time63. 制动时间braking time64. 微起升low speed up travel65. 微下降low speed down travel堆垛机一般概念66. 载荷升降lifting (lowering) of load67. 超速下降overspeed lowering68. 水平运行travelling of S/R machine69. 货叉伸缩telescoping of shuttle70. 点动inching71. 出库retrieve72. 入库store73. 自动认址auto-identify74. 绝对认址absolute addressing75. 相对认址relative addressing76. 信息传输data transmission77. 有线传输cable communication78. 无线传输radio communication79. 位置检测location detection80. 司机搭乘driver on board81. 设定address setting82. 巷道口设定address setting at the end of an aisle83. 控制室设定address setting from control cabinet84. 自动控制auto control85. 简易顺序控制simple program control86. 计算机控制computer control87. 可编程序控制PLC control88. 机上控制on-board control89. 地面集中控制centralized control on floor , distant control on floor90. 直接数字控制direct digital control91. 监视控制monitor control92. 电缆供电power supply through cable93. 滑触线控制power supply through conduting rails94. 光电检测photo-electric detection95. 红外线检测infra-red inspection96. 交流变频调速speed regulation via frequency modulation97. 堆垛起重机稳定性S/R machine stability98. 载重稳定性stablity under working conditions99. 事故状态稳定性stability under accident conditions100. 静载试验/动载试验static tests / dynamic tests。
【10-10】JB5319.2—91有轨巷道堆垛起重机安全规范
有轨巷道堆垛起重机安全规范JB 5319.2—91中华人民共和国机械电子工业部1991—07—03批准1992—07—01实施1 主题内容与适用范围本标准规定了有轨巷道堆垛起重机的设计、制造、使用等方面的安全要求。
本标准适用于高层货架仓库内的有轨巷道堆垛起重机(以下简称堆垛机)。
2 引用标准GB 985 气焊、手工电弧焊及气体保护焊焊缝坡口的基本形式与尺寸GB 986 埋弧焊焊缝坡口的基本形式与尺寸GB 1102 圆股钢丝绳GB 2682 电工成套装置中的指示灯及按钮的颜色GB 3323 钢熔化焊对接接头射线照相和质量分级GB 3811 起重机设计规范GB 4205 控制电气设备的操作件标准运动方向GB 5117 碳钢焊条GB 5118 低合金钢焊条GB 5972 起重机械用钢丝绳检验和报废实用规范GB 8110 二氧化碳气体保护焊用钢焊丝GBJ 232 电气装置安装工程施工及验收规范3 一般要求3.1 堆垛机及其零、部件的强度、刚度、稳定性等,应满足GB 381l的规定。
3.2 结构件焊接要求3.2.1 主要受力构件,如下横梁、立柱、上横梁、载货台、货叉等,其对接焊缝质量不得低于GB 3323中Ⅱ级焊缝的规定。
3.2.2 焊条、焊丝和焊剂应与被焊接件的材料相适应,并应符合GB 5117、GB 5118和GB 8110的规定。
3.2.3 焊缝应符合GB 985与GB 986的规定。
3.2.4 焊接工作必须由经培训考试合格的焊工担任。
主要受力构件的焊缝附近必须打上焊工及检验人员代号钢印。
3.3 可拆装的连接部件,应防止自行松动。
3.4 堆垛机的金属结构和零、部件应采取防锈措施。
3.5 堆垛机电气设备的安装,必须符合GBJ 232的有关规定。
4 构造设计安全要求4.1 设计堆垛机时,应考虑堆垛机遇上撞击不倾覆,并应防止堆垛机脱轨。
4.2 司机室设计要求4.2.1 司机室应有良好的视野,能观察到货物人出库作业的全部过程,并便于操作和维护。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无轨堆垛机 起重能力:1000㎏
堆高:5-12米
有轨巷道式堆垛机与无轨巷道堆垛机比较: (1)有轨巷道式堆垛机采用钢轮在钢轨上运行,无轨 堆垛机采用轮胎,因此轮压不同时会产生不同的变 形量;
(2)有轨堆垛机采用立柱,无轨堆垛机采用多级门架,
货叉在水平和垂直方向上的定位精度不同。
二、巷道式堆垛机的特点
一、控制方式 1. 手动控制方式 用于出入库频率不高,规模不大的仓库。 2. 半自动控制方式
这种控制方式,其控制设备除手动操纵器外,一般还设有 简单的继电器逻辑控制装置。除自动停准功能外,还能自动换 速、自动认址、自动完成货叉伸缩存取货物的功能,适用于出 入库比较频繁,规模不大的仓库。
3. 全自动控制方式 在机上便于地面操作的部位装有设定器,操作人员站在巷 道口的地面,通过机上设定器,设定出入库作业方式和地址等 数据。适用于出、入频率高,堆垛机台数不多且未配置输送机 的中小规模(货位一般不超过2000个)仓库。
当载货台上承受载荷超过最大或最小允许值时,通过钢 丝绳的拉力大小,调节装置中的弹簧产生不同行程,从而切 断起升装置电机回路电源,使装置及时停止运转。
三、钢丝绳断绳保护 断绳保护装置是由螺杆、压缩弹簧、左右安全钳及连 杆机构等组成 。一旦当钢丝绳断裂 ,使断绳保护装置夹 紧在起升导轨上,从而保证载货台在断绳时不致坠落。 四、下降超速保护 不论什么原因,一旦载货台下降发生超速现象时,此 保护装置立刻将载货台夹住。
地面支承式堆垛机:行走轨道铺设于地面上,上部导轮 用来防倾倒或摆动。
2、按结构形式分 单立柱堆垛机 双立柱堆垛机
自重轻 刚度差 起重量2t以下
刚度好、速度快 起重量可达5t
2.5 有轨巷道堆垛机—种类及特点
2.5 有轨巷道堆垛机—种类及特点
3、按作业方式分 (1)单元式堆垛机 是对托盘单元进行出入库作业的堆垛机。 (2)拣选式堆垛机 是由操作人员向(或从)货格内的托盘(或 货箱)中存入(或取出)少量货物,进行出入库作业的堆垛机。这 种堆垛机的特点是没有货叉。 (3)拣选-单元混合式堆垛机 具有单元式与拣选式综合功能的 堆垛机。其载货台上既有货叉装置,又有司机室,可以满足两种作 业方式的要求。
4. 远距离集中控制方式 设定器安装在地面集中控制室内。操作者通过设定 器设定出入库地址和作业方式,并输入到地面或机上的 控制装置(多为计算机)中,经过计算和判断,发出堆 垛机运行的控制命令,实现堆垛机的远距离集中控制。 这种方式适用于出入库频繁,规模比较大,有多台堆垛 机和输送机,仓库容量(货格数在2000个以上)较大的 仓库,特别是低温、黑暗、有害等特殊环境的仓库。可 以节省人力,改善劳动条件,提高仓库作业效率,但初 始投资和维护费用较高。
第三节 安全保护装置与措施
一、运行保护
1. 在运行和升降方向,距终端开关一定距离处设强迫减速开 关,以确保及时减速。
2. 货叉伸缩机构只有在堆垛机运行机构不工作和起升机构亦 不工作时,才能启动。反过来,如果货叉已离开中央位置, 堆垛机运行机构便不能启动,而起升机构只能以慢速工作。 二、钢丝绳过载和松弛保护
2. 绝对数字认址系统 每一个货位的列数和层数分别用编码表示。堆 垛机运行时就用相应的检测装置,对标号牌进行读数, 检测所在的实际地址,然后送入地址运算程序与目的 地址比较。当其差值为一定数值时即进行减速,差值 为零时,发出机构停止的信号。 3. 非数字式认址系统
在每个货格前装一个发号元件(如干簧管)。当 堆垛机来到目的地址前时,磁场使堆垛机上的检测元 件动作,堆垛机即能确认已到了目的地址。
3、取物装置复杂。堆垛机配备有特殊的取物装置, 常用的有伸缩货叉、伸缩平板,工作时,能对两侧货 架作业,存取货物。 4、堆垛机的电力拖动系统要同时满足快速、平稳和 准确三个方面的要求。
5、安全要求高。必须配备齐全的安全装置,并在电 器控制上采取一系列连锁和保护措施。
三、有轨巷道式堆垛机的分类
1. 按支承方式分 悬挂式堆垛机 : 其行走机构安装在堆垛机门架的 上部,地面上也铺设有导轨。
四、 有轨巷道堆垛机的结构组成
巷道式堆垛机由起升机构、运行机构、载货台及取 货装置、机架以及电器部分组成。
一、升降机构
是使载货台垂直运动的机构。一般由电动机、制 动器、减速机、滚筒或轮以及柔性件组成。常用的 柔性件有钢丝绳和起重链两种。除了一般的齿轮减 速机外,由于需要比较大的速比,因而采用蜗轮蜗 杆减速机和行星减速机的也不少。起重链传动装置
无轨堆垛机(高架叉车)
无轨巷道堆垛机又称为高架 叉车,是一种变形叉车。其机 动性比巷道式堆垛机好。无轨 巷道式堆垛机可分为上人式和 不上人式两种,驾驶舱随门架 同时上升称为上人式,优点是 在任何高度都可以保持水平操 作视线,保证最佳视野以提高 操作安全性。同时由于操作者 可以触及货架任何位置的货物, 故可以同时用于拣货及盘点作 业 。
三、载货台及取物装置
取物装置:根据托盘的形状,单元货物的尺寸与重量 等。目前已设计出了各种取货装置,包括人力取货, 采用电磁或真空吸盘的存取装置,利用动力输送机的 存取装置,利用机械手的取货装置以及最普遍的伸缩 货叉装置等,而最常用的是伸缩货叉取货装置。
货叉装置是堆垛机存取货物的执行机构,装设在堆垛机载货台上。 货叉可以横向伸缩,以便向两侧货格送入(或取出)货物。货叉根据 其叉子的数量不同,可分为单叉货叉、双叉货叉和多叉货叉。最常见 的是前两种,多叉货叉多用于特长货物的堆垛。 货叉一般采用三级直线差动式伸缩货叉,由上叉、中叉、下叉 (固定叉)及起导向作用的滚针轴承等组成,以减少巷道的宽度,且 使之具有足够的伸缩行程。货叉的动作包括伸叉、微起升(或微下 降),收叉三个动作,货叉伸出(或收回)动作时,其速度也为双档 变速。货叉伸缩速度一般为15m/min以下,高的可达 30m/min,在超 过 10m/min时需配备慢速挡,在启动和制动时用。
检测装置
置通过 钢丝绳或链条与起升机构 联接。载货台可沿着立柱 导轨上下升降。取货装置 安装在载货台上,有司机 室的堆垛机,司机室一般 也在载货台上。
二、运行机构 运行机构是堆垛机水平运行的驱动装置。一般由电动机、 联轴器、制动器、减速箱和行走车轮组成。行走轮结构分有 轮缘和无轮缘两种结构,有轮缘的车轮,当堆垛机货叉作业 时,会对车轮产生啃轨力。所以为防止啃轨现象,多采用无 轮缘车轮,并在下横梁底部安装侧面导向轮。
伸缩货叉的结构形式主要有两种:齿轮齿条及链传动。
这两种传动方式各有其优缺点:齿轮传动的传动精度较高, 定位准确,但是齿轮传动方式的齿条加工困难,装配精度 要求很高;而链传动方式虽然精度不高,但加工装配都比 较容易。
四、机架:(金属结构)
是堆垛机的主要承载构件,可分为单立柱和双立柱 两种结构类型。一般都是由立柱、上横梁和下横梁三大部 分组成。 当堆垛机启动、停止及加减速运行时会产生惯性力, 使立柱在巷道的纵向发生挠曲,整个金属结构成为振动体, 其上部的振动较大。同样,在巷道的垂直方向,立柱由于 货叉作业时的弯矩作用而产生弯曲,使叉端挠度增大。当 柱端振动和货叉前端的挠度超过极限值时,就成为堆垛机 自动定位的障碍,所以堆垛机的金属结构应具有足够的强 度和刚度。
第四节 巷道堆垛机
1、巷道式堆垛机的主要用途
巷道式堆垛机是立体仓库中用于搬运和存取 货物的主要设备。是随立体仓库的使用而发 展起来的专用起重机。
巷道式堆垛机的主要用途是在高层货架的巷 道内来回穿梭运行,将位于巷道口的货物存 入货格;或者,取出货格内的货物运送到巷 道口。
2.巷道式堆垛机的由 来
有轨巷道式堆垛机替代桥式堆垛机的原因: (1)自重很大,必须用比较坚固的建筑结构支撑; (2)在仓库的顶部与货架之间要有很大的净空; (3)堆垛机的通道宽度大,作业范围要受大梁的跨度限制。
五、其它保护装置和措施 1. 货格虚实探测装置。在入库作业中,货叉将货 物单元送入货格之前,先用一个机械的或者光电 的探测装置检查一下该货格内有无货物。如果无 货,则伸出货叉将货物存入货格,如果已有货, 则报警停止进行后续的运作。 2. 空出库检测。在出库作业中货叉伸进货格完成 取货动作之后,如果在货位上检测不到有货物存 在,则报警。 3. 伸叉受堵保护。货叉伸出受堵时,伸缩机构传 动系统中装设的安全离合器打滑进行保护。如果 延续一定时间后,货叉尚未伸到头,即报警。
1、整机结构高而窄。采用有轨巷道式堆垛机的 高架仓库货架很高,而货架巷道非常狭窄,堆 垛机的宽度一般只与所搬运的单元货物的宽度 相等。 2、结构的刚度和精度要求高。堆垛机的金属结 构设计除需满足强度要求外,结构的刚度和精 度。制动时,机架顶端水平位移一般要求不超 过 20mm ,结构振动衰减时间要短。载货台在立 柱上的升降导轨的不垂直度一般要求不超过 3~ 5mm。
二、自动认址和定位 自动控制的堆垛机必须具有自动认址系统。自动认址 系统可分为数字式和非数字式两大类,而数字式认址又可 分为相对数字认址系统和绝对数字认址系统 1. 相对数字认址系统 每个货格有一个列号和一个层号。当操作人员输入货 格地址时,计数器里就记下了目的地址的列数和层数。从 中减去堆垛机在接受这个作业命令时所处位置的列数和层 数后,其差值就分别代表堆垛机从目前所处位置走到目的 地址需沿巷道纵长方向经过的列数和沿垂直方向经过的层 数。堆垛机沿巷道运行时,每经过 1 个货列就计 1 个数。计 够了一定的数(离目的地的距离)就减速,到达了目的地 就停止。在货台升降时,也用同样的方法认址。
起升机构
多数装在上部,常配有平衡重块,以减小提升功率。
为了使起升机构结构紧凑,常常使用带制动器的电 机。
巷道式堆垛机的结构
双 立 柱 型
2.5 有轨巷道堆垛机—基本构造及工作原理
起升机构
行走机构
2.5 有轨巷道堆垛机—基本构造及工作原理
机架
载货台及货叉
2.5 有轨巷道堆垛机—基本构造及工作原理
4. 货物位置和外形检测。如果货物单元在载货 台上位置偏差超过一定限度,或者倒塌变形, 检测装置便报警,堆垛机不能继续工作。 5. 堆垛机停准后才能伸货叉。