基于声纳探测技术的水下三维场景实时成像系统
基于三维成像声纳技术的水下结构探测新方法
t r a d i i t o n a l on s a r s y s t e m a n d u n d e r w a t e r v i s u a l i z a t i o n t o o l s e x i s t ome s d e f e c t s w h e n t h e y a r e u s e d a l o n e .3 1 a r e e - d i me n s i o n a l r e a l —
戴 林军’ ,郝 晓伟 ’ ,吴 静’ ,张振 辉
杭州 3 1 0 0 1 2 ; ( 1 .浙 江省水利 科技推 广 与发 展 中心 ,浙 江
2 .浙 江钱 江科技 发展 有 限公 司,浙江
摘
杭州 3 1 0 0 1 2 )
要 :水利工程水下结构安全隐患的探测至关重要 ,而传统声纳 系统 和水 下可视化工具在单 独使用时均
p e r f o r ma nc e .E a c ht e c no h l o g yi n d e xo ft h e e q u i p me n t s h o w e dt h a t i t c o u l dme e t he t d e ma n df o r d e t ct e i n gt he u n d e wa r t e r s t n l c t u r e s
基于声纳成像的水下目标检测技术研究

基于声纳成像的水下目标检测技术研究第一章绪论随着水下工作的不断深入,对水下目标检测和成像的需求变得越来越迫切。
水下环境复杂多变,由于光线的折射和吸收而导致可见光线受到了严重的限制。
因此,传统的光学成像技术并不适用,必须采用其他技术。
声波作为一种无需介质传导的物理信号,在水下环境下有广泛的应用,因为它的传播损失异常小。
声纳成像正是一种基于声波传播的水下目标检测技术。
本文将对声纳成像的原理、技术以及应用进行详细介绍。
第二章声纳成像的原理声波在水中的传播速度远远高于空气中的传播速度,同时水中的介质也非常清晰、易于穿透。
声纳成像技术就是利用这一特点来检测水下目标的位置、形状和大小。
声波的信号传输可以被分为两种类型:主被动式和剖面式。
主被动声纳系统首先使用主动声学发生器发生声波信号,这些信号到达水中的物体表面并返回声波接收器。
接收到的反射信号会被处理,以生成一幅声波图像。
剖面式声纳则是由一组声线组成的剖面显示图像,每条线都代表了从声纳探头到水下目标的最短距离。
这种成像方法需要多次扫描以获取完整的目标轮廓。
第三章声纳成像的技术声纳成像技术包括能量、分辨率、带宽、灵敏度、动态范围、目标检测和跟踪等方面,下面分别进行介绍。
3.1 能量能量是声纳系统的重要参数,因为它越高,系统的探测范围就越远。
为了实现高能量输出,声纳系统一般使用宽频带的电子扫描器或高功率放大器。
在一些需要较长探测距离的应用中,声纳系统还需要使用特殊的信号算法,比如脉冲压缩,使得波形获得更高的信噪比和方向性。
3.2 分辨率分辨率是用于描述声纳系统对于目标结构的检测能力。
基本的分辨率与声纳系统的发送电源和探头大小有关。
在为海洋测量而设计的声纳系统中,改变发射器和接收器之间的距离,就能改变目标的分辨率。
此外,改进系统的精度和分辨率还需要在处理过程中加强。
3.3 带宽波形带宽和声纳系统的信噪比、时间分辨率和空间分辨率等密切相关。
一个较高的频谱范围、一个较窄的中心带宽比定义了一个基于声纳原理的信号处理设备。
三维成像声呐在水下沉船扫测中的应用
三维成像声呐在水下沉船扫测中的应用摘要:本文介绍了三维成像声呐的系统组成和工作原理,并将其应用于水下沉船扫测中。
实际应用结果表明,三维点云数据能够很好的获取水下沉船的沉坐状态,精细的展示沉船的各个细节,数据完整、准确,具有其独特的优越性。
关键词:三维成像声呐;水下沉船;点云数据1 引言船舶失事沉没后,从事打捞工作的技术人员需要掌握沉船的沉坐状态信息,以便采用相应的方法进行打捞工作。
传统的二维成像声呐和多波束系统在直观性和精细度方面不能满足船体沉坐状态探测的要求,而三维成像声呐系统能够获取目标更精细的三维点云数据,从而可以提供沉船更多细节状态的描述。
本文阐述了三维成像声呐系统的基本组成和原理,并结合工程应用实例,从数据采集、点云数据去噪、配准和拼接建模等数据处理过程进行了分析。
2 三维成像声呐基本原理三维成像声呐BlueView 5000可生成水下地形、结构和目标的高分辨率图像。
声呐采用紧凑型低重量设计,便于在三脚架或ROV上进行安装,只需触动按钮,三维扫描声呐就会生成水下景象的三维点云。
扫描声呐头和集成的云台可以生成扇区扫描和球面扫描数据。
可以在低照度或者零可见度的水下环境下,获得陆地三维激光扫描一样的图像。
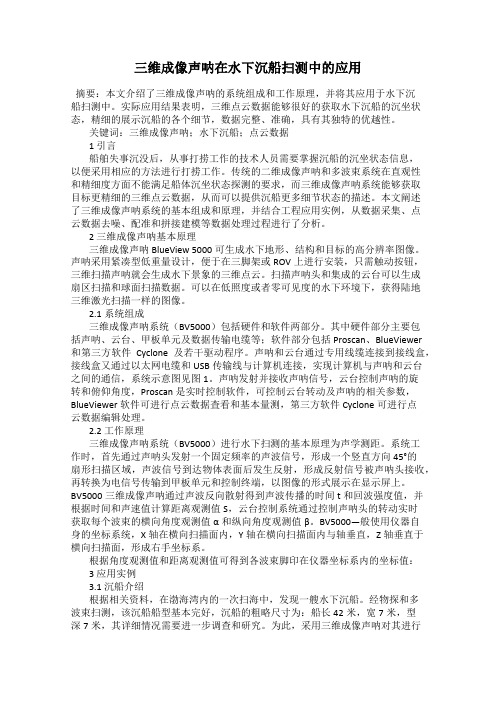
2.1系统组成三维成像声呐系统(BV5000)包括硬件和软件两部分。
其中硬件部分主要包括声呐、云台、甲板单元及数据传输电缆等;软件部分包括Proscan、BlueViewer和第三方软件Cyclone及若干驱动程序。
声呐和云台通过专用线缆连接到接线盒,接线盒又通过以太网电缆和USB传输线与计算机连接,实现计算机与声呐和云台之间的通信,系统示意图见图1。
声呐发射并接收声呐信号,云台控制声呐的旋转和俯仰角度,Proscan是实时控制软件,可控制云台转动及声呐的相关参数,BlueViewer软件可进行点云数据査看和基本量测,第三方软件Cyclone可进行点云数据编辑处理。
2.2 工作原理三维成像声呐系统(BV5000)进行水下扫测的基本原理为声学测距。
水下三维场景实时成像系统

摘
要: 针对 目前水下三维声纳实时成像系统前端信号通道多、 波束形成计算量大的问题 , 提出一种基于现场可编程门阵列( F P G A )
的水下 三维 场景 实时 成像 系统 。采 用 F P G A 阵列 控制 多路信 号 同步采样 ,优化波 束 形成算 法对海 量数 据进 行并 行处理 ,同时利 用
嵌 入 式处理器 P o w e r P C控 制 系统 ,最终 由主控 P C完成三 维 图像实 时显示 。实 验 结果表 明 ,该系统 能够 在水 下 2 0 0 m 的范 围 内实 现 分辨 率为 2 c m 的三 维成像 ,三 维 图像刷新 率可 达 2 O 帧/ 秒。
关健词 :水 下探测 ;三维声 纳 ;波束 形成 ;实 时显示 ;现 场可 编程 门阵列 ;MP C 8 3 1 3 处 理器
2 . Mi l i t a r y Re p r e s e n t a t i v e Of ic f e o f t h e Na v y i n Ha n g z h o u Ar e a , Ha n g z h o u 3 1 0 0 2 7 , Ch i n a )
Re a l - ・ t i me I ma g i n g S y s t e m f o r Un d e r wa t e r 3 D S c e n e
水声成像技术在水下建筑监测中的应用

水声成像技术在水下建筑监测中的应用在人类对海洋的探索和利用不断深入的过程中,水下建筑的建设和维护变得越来越重要。
水下建筑包括桥梁墩台、海洋平台、海底管道、水下隧道等,它们在海洋资源开发、交通运输、能源输送等方面发挥着关键作用。
然而,由于水下环境的复杂性和特殊性,对水下建筑的监测面临着诸多挑战。
水声成像技术的出现为水下建筑监测提供了一种有效的手段,本文将详细探讨其在这一领域的应用。
一、水声成像技术的原理与特点水声成像技术是利用声波在水中的传播特性来获取水下物体的图像信息。
声波在水中的传播速度相对稳定,且衰减小,能够在较大的范围内传播。
通过发射声波并接收其反射波,然后对反射波进行处理和分析,可以构建出水下物体的形状、结构和位置等信息。
与其他监测技术相比,水声成像技术具有以下显著特点:1、穿透能力强水对电磁波有很强的吸收作用,使得基于电磁波的监测技术在水下的应用受到很大限制。
而声波能够在水中有效地传播,能够穿透一定厚度的泥沙、淤泥等障碍物,从而获取被覆盖物体的信息。
2、分辨率较高随着技术的不断进步,水声成像系统的分辨率不断提高,可以清晰地分辨出水下建筑的细微结构和缺陷。
3、实时性好能够实时获取水下图像,为及时发现问题和采取措施提供了有力支持。
4、适用范围广可以在不同深度、不同水质的水域中工作,适应各种复杂的水下环境。
二、水声成像技术在水下建筑监测中的应用场景1、水下建筑结构完整性监测水下建筑在长期的使用过程中,可能会受到水流、腐蚀、海洋生物附着等因素的影响,导致结构出现裂缝、变形、腐蚀等问题。
水声成像技术可以对水下建筑的表面和内部结构进行全面扫描,及时发现这些问题,并评估其严重程度。
例如,对于桥梁墩台,可以通过水声成像技术检测墩台表面的混凝土剥落、钢筋锈蚀等情况;对于海洋平台,可以监测平台支柱的变形和焊缝的开裂情况。
2、基础冲刷监测水下建筑的基础在水流的作用下可能会发生冲刷,影响其稳定性。
通过定期使用水声成像技术对基础周围的地形进行测量,可以掌握冲刷的发展情况,为采取防护措施提供依据。
基于声纳传感技术的水下三维扫描系统研究

基于声纳传感技术的水下三维扫描系统研究近年来,随着人类文明的不断发展和深入,科技的进步也越来越快速。
一项受到广泛关注的科技就是基于声纳传感技术的水下三维扫描系统。
本文将从定义、发展、应用、未来发展等角度进行探讨和研究。
定义基于声纳传感技术的水下三维扫描系统,简称水下三维扫描系统。
它是一种利用声纳探测技术,同步记录物体的坐标、形状、颜色等三维信息,并以计算机数字化方式存储、分析和处理的系统。
这种系统可以在水下环境中,将水下物体的三维信息呈现在计算机屏幕上,便于研究人员的分析和研究,使得水下探测与勘察工作变得更加便捷、快速和准确。
发展随着科技的不断进步与扩展,水下三维扫描技术也相应的得到了应用和发展。
1980年代初期,水下声纳扫描仪已经被广泛应用在海洋科学和海洋工程领域,并取得了一定的成果。
20世纪90年代,水下三维扫描技术已经逐渐成熟,主要应用于海洋生物学、水文学和纪录文物等领域。
随着科学研究的拓展以及社会需求的不断增加,水下三维扫描技术在近年来得到了快速的发展和普及,成为科技领域里的热门研究课题。
应用水下三维扫描系统有着广泛的应用空间,主要应用于以下几个方面:1.海洋科学:水下三维扫描技术可以帮助我们更好的了解海洋生态系统,探测各种海洋生物的生长、繁殖等生态信息,对研究深海生命和深海生态环境有很大帮助。
2.水下文物勘测:水下三维扫描技术可以帮助文物修复人员进行文物勘探和修复,快速准确地记录文物的形状、颜色等信息,以进行精准的维修,保护人类文明的宝贵财富。
3.海洋勘探:水下三维扫描技术在海洋油气勘探、矿产勘探等方面也有着广泛的应用,可以探测各种海底资源的情况,帮助研究人员进行更好的勘探和开发。
未来发展当前,水下三维扫描技术正逐步向着更为广阔的应用领域拓展,如水下建筑、海洋探险和深海环境等领域也将成为未来技术发展的方向。
随着技术的不断提升和改进,越来越多的应用领域将会被开发出来,推动人类科技发展。
总之,基于声纳传感技术的水下三维扫描系统,可以帮助我们更好的掌握海洋信息、文物实物和地质资源等领域的三维信息,发挥出了巨大的作用。
三维成像声纳在水下工程中的应用研究
三维成像声纳在水下工程中的应用研究所谓的三维成像声纳技术,就是利用声纳设备发射声波,这些声波触及到目标物以后会反射回来,系统可以根据回波对目标物进行定位和成像,这种方式与常规的旁扫有所不同,它能够直接获取水下结构的三维图像,不仅及时,而且准确,将这种技术应用于水下工程中,可以顺利完成水下探测工作。
文章简述了三维成像声纳系统的构成及功能,并分析了其在水下工程中的具体应用。
标签:三维成像声纳;水下工程;应用前言影响海洋工程质量安全的因素有很多,一般将这些因素分为两种,一种是水上结构部分,使用一些常规技术即可排除水上部分的安全隐患,包括触摸、观察、NDT检测等,另一种是水下结构部分,受到环境的限制,使用常规技术无法排除水下部分的安全隐患,这部分隐患不仅难发现、难处理,而且随着日积月累,微小缺陷可能会逐步扩大,最终导致极大的破坏,三维成像声纳技术就能够有效解决这一问题,高效检测海洋工程水下复杂结构部分的安全隐患,保证海洋工程水下施工的安全、稳定运行。
1 三维成像声纳系统概述1.1 系统的构成与具体功能三维成像声纳系统由三部分构成,其一是声纳头,其二是电脑终端,其三是电源和设备安装支架,其中声纳头有两个阵,一个是声纳阵,声波信号沿着锥形方向发射出去,另一个是接收阵,该阵由若干个水听器传感器组成,接收返回来的声波,最终目标物的三维图像会在电脑终端显示出来,测距的范围一般在1米至150米,图像更新的速度可以达到每秒20次。
声纳头的布局有两种形式,一种是靠岸加固,另一种是随船移动,具体布局形式根据周围环境以及检测对象的特征确定。
而在一般的海洋工程中,经常使用的是二维声纳Seaking DFS,声纳头的布局有所不同,一般都是固定安装在ROV(水下机器人)上,通过对水下机器人的操控实现对声纳头位置的控制,随着海洋工程的进一步发展,人们对声呐技术提出更高要求,将三维声纳应用于海洋工程中,通过声波信号的发射与收集,形成具有较高分辨率的图像,不仅能做到实时成像,图像还可以被缩放、旋转和移动,为水下施工过程提供准确、完整的信息[1]。
海洋测绘技术手段在水下隐蔽工程结构检测中的应用——以水下三维全景声呐为例
海洋测绘技术手段在水下隐蔽工程结构检测中的应用——以水下三维全景声呐为例◎ 林斌 福建省港航勘察科技有限公司摘 要:本文以利用海洋测绘技术手段应用于沿海陆岛交通码头、内河桥梁水下隐蔽工程结构检测的实际案例为依托,介绍了Teledyne Blueview 5000-1350水下三维全景声呐系统的探测原理和方法,分析了实际应用过程中实现的目的和效果,总结了应用过程中容易出现的一些问题,并提出了使用过程中的改进措施和建议。
关键词:海洋测绘技术手段;水下结构检测;水下三维全景声呐系统;虚假反射1.引言海洋测绘是研究海洋、江河等水域及毗邻陆地区域各种几何、物理、人文等地理空间信息采集、处理、表示、管理和应用的科学与技术[1],主要以海洋地球物理探测技术手段为主,海洋测绘发展历程经历了模拟化、数字化初期阶段,正向信息化、智能化新阶段转型[1],提供的技术服务也向预测、决策等服务方向拓展。
我国海洋测绘技术研究的进展主要在卫星测高、卫星遥感反演、多元数据融合分析、机载L iDA R测量技术等方面有进一步完善和成熟。
我国海洋测量平台由单一的岸基、海基测量平台逐步向天基、空基和潜基平台延伸,海洋装备向无人化、智能化、便携化和多功能化方向发展。
在“一带一路”的引领下,水运工程发展迅速,为确保水运工程正常履行使用功能,需按一定的时间对其进行相应的结构检测工作,以评估判断该工程是否能继续提供安全可靠的使用功能,其中水运工程水下部分的结构处于隐蔽环境,检测主要通过水下摄像、人工潜水探摸等方式进行[2],数据结果受采集条件及人为影响因素较大,且无法判断数据的可靠性。
随着技术的进步,海洋测绘装备不断优化升级,具有越来越多的优势和更多的应用场景,利用海洋测绘技术手段对水运工程水下部分进行检测,是一种更加客观、可靠的方法,主要的技术为水下激光扫描成像、声波扫描成像,其中激光的应用环境相对严苛,受水体浊度影响较大,信号衰减严重,数据质量不稳定,相反声波具有较强的穿透能力,具有较广的应用场景。
实时三维声呐技术在平台水下检测中的应用
实时三维声呐技术在平台水下检测中的应用代兆立;窦海余;徐爽;孙大权;蔡彪【摘要】滩海平台工作水深较浅,约1~3 m,平台桩基为群桩,形状不规则,对其难以进行定量检测.首次采用三维声呐系统对冀东油田滩海平台的水下工程进行检测.检测结果表明,冀东油田1号构造平台桩基未发现异常,NP1-1D平台桩基周围3 m范围内有约0.5 m深的凹坑,NP1-29平台西北侧桩基北侧有长44 m、宽约14 m、较周围地形深2.6 m的沟槽,NP1-3D平台桩基宽度约11 m,桩基下方有较小沟槽.检测成果满足工程要求.对于工作水深大于3 m的平台,其桩基可采用Echoscope 实时三维声呐系统进行水下检测;工作水深小于3 m时,需进行现场试验确定.【期刊名称】《石油工程建设》【年(卷),期】2018(044)006【总页数】4页(P38-41)【关键词】三维声呐;平台桩基;水下检测【作者】代兆立;窦海余;徐爽;孙大权;蔡彪【作者单位】中国石油冀东油田公司, 河北唐山 063004;中国石油冀东油田公司, 河北唐山 063004;中国石油集团海洋工程有限公司, 北京 100028;中国石油冀东油田公司, 河北唐山 063004;中国石油冀东油田公司, 河北唐山 063004【正文语种】中文滩海人工岛处在复杂的海洋环境中,受到风、浪、流、海冰、风暴潮和地震等多种海洋环境因素的共同影响,损毁事件屡见不鲜,滩海人工岛工程的安全检测与预警是人工岛建设与运行的重要保障[1-2]。
冀东南堡油田采用人工岛海油陆采工程模式,1号构造相继建成3座人工岛,包括NP1-29平台、3座海底管道(简称海管)登陆平台(NP1-1D人工岛的2座海管登陆平台、NP1-2D人工岛的1座海管登陆平台)、NP1-3D人工岛海底管道栈桥支撑平台。
由于近海风、浪、流、冰等动力因素的影响,平台桩基周边可能存在冲刷现象,严重时可能给安全生产带来威胁。
工程设计及相关标准都提出了定期检测要求[3-4],检测内容包括水深与海底地形测绘、平台桩基探测、桩基冲刷、废弃电缆及海底障碍物等。
海洋技术 交流 三维声呐成像系统在防波堤水下安装块石中的运用
技术交流▏三维声呐成像系统在防波堤水下安装块石中的运用目前,水工建筑物或水下结构物的探测及安装的主要手段有水下目视检测、水下照相录像、潜水辅助安装等方法,在防波堤水下块石安装中最主要的方法仍是潜水员辅助履带吊或挖掘机进行作业。
该方法虽然操作简单、应用面广,但是在水体浑浊、波浪大等不利条件影响下,安装效率往往难以满足工程进度需要,且潜水作业存在一定的安全风险。
水下三维声呐成像技术是通过发射和接收声波进行测距定位的成像技术。
此项技术在水下细部结构探测中已经得到良好的应用证明,能够实时、高效、清晰地生成水下结构的三维图像。
一、工程概况阿什杜德港位于以色列首都特拉维夫以南40km的城市Ashdod。
港口扩建项目需要安装护坡块石的区域由两个部分组成。
主防波堤为原有防波堤的延伸段,平均水深为20~22m,长度约600m,护面块石依次为1~3t 块石D和3~6t块石C;护面块体为7m3和16.7m3两种立方体结构,具体布置形式见图1。
图1 主防波堤断面布置单位:m图2 防波堤预制混凝土块结构Lee防波堤为抛石堤,从现有海岸向外侧延伸至Q28码头,并与Q28码头衍接,总长度约1480m,水深范围为0~17m;堤身基础采用局部换填和碎石桩处理两种形式。
护面石为1~3t和3~6t两种规格,护面块体为7m3和16.7m3两种规格的立方体结构。
防波堤预制混凝土块为近似立方体结构,混凝土预制护面块体总预制数量约3.82万块,典型结构见图2。
二、施工特点与难点⑴护面水深大,主防波堤原泥面高程为-21~-17m。
⑵受抛石影响,水下能见度低,冬季风浪条件差,涌浪大,海况复杂恶劣。
⑶水下工序复杂,大型长臂挖机理坡范围只能达到-8m的深度,以下区域需要依靠履带吊吊装抛石,按设计要求理坡成型耗时长、功效极低,影响护坡石块的安装进度。
⑷护面长。
总长65m,其中-3m以下护面长度达54m,该段护坡石块需要水下安装,质量控制、验收难度大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于声纳探测技术的水下三维场景实时成像系统
摘要:针对目前水下三维声纳实时成像系统前端信号通道多、波束形成计算量大的问题,提出一种基于现场可编程门阵列(FPGA)的水下三维场景实时成像系统。
采用FPGA 阵列控制多路信号同步采样,优化波束形成算法对海量数据进行并行处理,同时利用嵌入式处理器PowerPC 控制系统,最终由主控PC 完成三维图像实时显示。
实验结果表明,该系统能够在水下200 m 的范围内实现分辨率为2 cm 的三维成像,三维图像刷新率可达20 帧/秒。
1 概述近年来,随着人们对海洋资源的不断需求与开发,水下探测技术得到了飞速发展。
人们对海洋的主要探测手段是声波,即声纳技术。
因此,利用声纳进行水下探测成为了当今海洋研究的重点课题。
然而,大部分声纳系统都是通过声波来判断有无声纳目标,以及目标的方位和距离。
目前,国内外在海底三维声纳成像技术方面已经取得了一定的成果[1]。
例如:美国RESoN 公司开发的新一代数字声纳SeaBat8125,欧洲共同体和挪威共同开发的Echoscope系列三维声纳,美国的海洋工业公司开发的双频识别声纳以及美国的Farsounder 公司开发的三维前视声纳[2-3]。
我国三维成像声纳也得到一定的发展,中科院声学所、715 所和哈尔滨工程大学等单位等都研制了三维声纳成像系统的试验样机并发表了相关论文[4]。
但这些声纳成像技术大多基于二维映射三维图像,或者小范围的慢速三维成像,成像效果不佳,实时性太差[5]。
本文提出基于三维声纳探测技术的水下三维场景实时成像系统,设计并实现4848 路信号的同步采样,128128 个空间波束形成的大规模数据处理和实时水下三维场景成像。
2 系统总体设计2.1 系统技术特点目前,实时高分辨率的三维声纳系统面临2 个问题[6]:(1)大量前端信号通道的硬件成本昂贵;(2)进行波束形成算法所需的乘累加计算量大。
首先,该系统采用了优化后的模拟退火算法[7],对二维平面上的每一个换能器分配权重系数,在最大旁瓣可以接受的条件下,部分换能器的权重系数可以分配为0,即达到对换能器稀疏化,减小系统运算量的效果[8]。
最终实现系统2 304(4848)个换能器组成的声学信号接收平面阵。