[管理]附合导线平差步骤
附合导线平差步骤
附合导线平差步骤一、数据处理1.数据输入:将测站、观测角度、观测距离等原始数据输入计算机或平差软件。
2.数据质检:对输入的数据进行初步的质检,检查是否存在错误数据、异常数据等,发现并剔除异常数据。
3.角度数据处理:将观测角度转换为弧度,便于后续计算。
4.距离数据处理:对观测距离进行单位转换,通常将其转换为米或千米。
5.数据配对:将同一测站观测到的角度和距离数据做配对,构成观测组。
6.编点编号:对测站进行编号,便于后续计算。
二、导线控制要素计算1.导线连杆长度计算:根据测站坐标计算导线连杆的几何长度。
2.导线初始点坐标计算:根据导线方位角、连杆长度和已知控制点的坐标计算导线初始点的坐标。
3.导线朝向角计算:根据已知控制点的坐标和导线的方位角,计算导线的朝向角。
三、平差计算1.平差模型确定:选择适当的平差模型,常用的有单位权平差模型、具有不等权的平差模型等。
2.条件方程建立:根据平差模型和导线控制要素的计算结果,建立条件方程组。
3.条件方程系数矩阵确定:根据条件方程组,将其转化为系数矩阵形式。
4.闭合差计算:根据条件方程和系数矩阵,利用最小二乘法计算闭合差,并评估其精度。
5.参数平差:利用闭合差和条件方程系数矩阵,通过参数平差法计算出导线的平差结果。
6.残差计算:根据平差结果和原始观测数据,计算各个观测量的平差残差,并评估其精度。
四、结果分析和判断1.平差结果分析:对平差结果进行查验和分析,判断平差是否满足要求,是否符合实际测量误差的范围。
2.误差判断:根据平差结果和平差残差,判断是否存在异常误差,如超限误差、粗大误差等。
3.解释和修正:对异常误差进行解释和修正,如重新检查测量数据、进行补充观测等。
以上就是附合导线平差步骤的主要内容,通过这些步骤可以得到导线的最佳平差值,为后续的工程测量提供准确的基础数据。
在实际应用中,还需根据具体情况对平差步骤进行调整和优化,以满足实际工程测量的需求。
导线测量平差教程

计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差及以前版本没有设置限差,打开及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
附合导线平差计算过程说明
附合导线平差计算过程说明1)道路观测左角∑β测左=308°2.'38"+70°35'41"+156°56'39"+185°39'2"+205°21'59"+174°36'43"+197°31'46"+157°36'36"+135°14'40"+167°38'50"=1759°14'34"ƒβ测=a始边- a终边=-15"。
ƒβ容=± 40√n =±126"。
ƒβ测<ƒβ容,测角精度符合要求。
2)改正角:β=β测- ƒβ测/N。
3)坐标方位角的推算:根据起始边的坐标方位角及改正角,依据公式a下一边’= a始边+180°+转角(观测转左角)依次计算各边的坐标方位角。
4)坐标增量的计算及闭合差的调整坐标增量计算根据已经推算出的导线各边的坐标方位角和相应边的边长,按下面公式计算各边的坐标增量。
△ X AB=D AB*COS a AB,△ Y AB=D AB*SIN a AB,按附合导线要求,各边的坐标增量代数和的理论植,等于终起两点的已知坐标之差,所以,纵、横坐标增量闭合差按公式计算,Fx=∑△x测-(X终-X起)FY=∑△Y测-(Y终-Y起)导线全长闭合差f=√(ƒx2+ƒy2)=0.102m,k=f/∑D=1/38370<1/2000.满足精度要求。
5)根据后一点的坐标及改正后的坐标增量,按公式推算前一点坐标。
X前=X后+△x改Y前=Y后+△Y改最后,推算出终止边的坐标,与原有设计值相等,以作检核。
附和导线、闭合导线的简易平差与支导线的计算
否 无法计算,
所
计算的类 型
跳出提示选 择的提醒框
示
是
点击计算
是否
否
保存
是
保存结果TXT
退出
•
程 序 设 计 流 程
图
基础理论
• 计算方位角闭合差fβ,判断Sβ<fβ容
• β=α’CD -αCD
• fβ容=60或40
n:角的个数
• 分配角闭合差(平均分配),计算改正后的角
度
• V=—β/n βi改=βi+V
政
关键技术和难点
• 度分秒与弧度间的互相转换
•
public static class hddfm
•
{
•
const double pi = 3.1415926;
•
//角度转化为弧度
•
public static double angle_r(double alfa)
•
{
度
•
double alfa1, alfa2;
弧 度
•
return (alfa1 / 180d * pi);
的
•
}
•
//弧度转化为角度
相
•
public static double redian_a(double alfa)
互
•
{
•
double alfa1, alfa2;
•
alfa = alfa * 180d / pi;
转 换
•
alfa1 = Math.Floor(alfa) + Math.Floor((alfa - Math.Floor(alfa)) * 60d) / 100d;
地形测量附合水准路线的平差计算步骤
地形测量附合水准路线的平差计算步骤附合水准路线的平差计算步骤可以分为以下几个步骤:1.高程观测数据的准备:首先,需要准备高程观测数据,包括各测站观测的高程数值、观测时刻、观测仪器的基准高程等。
同时,还需要检查数据的准确性和完整性。
2.初始近似值的计算:根据高程观测数据,可以计算出初始近似的高程差值。
常用的初始近似值计算方法有重心化和里程法等。
重心化法是以平均高程为起点,将每个测站的高差逐步累加得到各标准差与组合因子之积的增量,而里程法是利用水准路线里程计算高程差。
3.条件方程的建立:根据观测数据和几何关系,可以建立附合水准路线的条件方程。
条件方程是高程平差问题的数学表达式,用来描述各观测值与未知数之间的关系。
常用的条件方程有平差方程、高差闭合差方程和封闭差方程等。
4.约束方程的引入:为了减小结果的误差,需要引入一定的约束条件。
约束方程是对观测值和未知数之间的约束关系的数学表达式,可以是已知高程值的约束、已知高程差值的约束或者其他几何约束。
5.平差计算的求解:根据条件方程和约束方程,可以将高程观测数据进行平差计算。
常用的平差方法有最小二乘法、最小二乘平差法等。
最终得到的结果是各个测站的高程值或者改正数,以及相应的精度估计。
6.检查和平差报告的编制:平差计算完成后,需要对结果进行检查,包括检查平差较验数、残差等。
如果结果符合要求,则可以编制平差报告,对计算过程和结果进行总结和描述,并进行精度评定和检验。
需要注意的是,以上步骤仅是附合水准路线的平差计算的基本步骤,具体的计算方法和步骤可能会因实际情况而有所不同。
此外,平差计算还需要考虑误差的传播和控制,以及精度要求等因素,以确保结果的准确性和可靠性。
闭合导线平差计算步骤
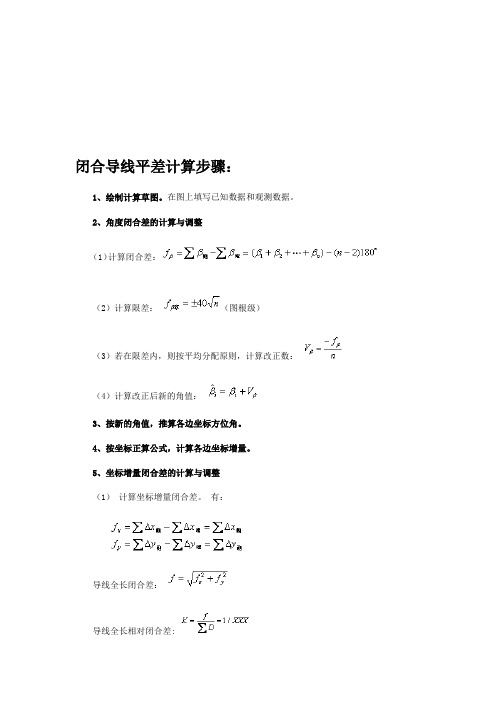
闭合导线平差计算步骤:1、绘制计算草图。
在图上填写已知数据和观测数据。
2、角度闭合差的计算与调整(1)计算闭合差:(2)计算限差:(图根级)(3)若在限差内,则按平均分配原则,计算改正数:(4)计算改正后新的角值:3、按新的角值,推算各边坐标方位角。
4、按坐标正算公式,计算各边坐标增量。
5、坐标增量闭合差的计算与调整(1)计算坐标增量闭合差。
有:导线全长闭合差:导线全长相对闭合差:(2)分配坐标增量闭合差若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。
并计算改正后的坐标增量。
6、坐标计算根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。
[ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。
计算表格见下图:闭合水准路线内业计算的步骤:(1) 填写观测数据(2) 计算高差闭合差h f =∑h ,若h f ≤容h f时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。
(3) 调整高差闭合差 各段高差改正数:i hi i hi L Lf V n nf V ·· ∑-=∑-=或各段改正高差:ii i V h h +=改(4) 计算待定点的高程闭合差(fh )水准路线中各点间高差的代数和应等于两已知水准点间的高差。
若不等两者之差称为闭合差高差闭合差的计算.支水准路线闭合差的计算方法.附合水准路线闭合差的计算方法.闭合水准路线闭合差的计算方法高差闭合差容许值 (n 为测站数,适合山地)(L 为测段长度,以公里为单位,适合平地)水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差改正数每公里改正数各测段的改正数每一站改正数各测段的改正数计算的基本步骤高差闭合差的计算闭合差的调整高程的计算(见例题2)例题2高程误差配赋表首先:将检查无误的野外观测成果填入计算表,包括:各测段的距离和高差值h i已知数据第一步:高差闭合差的计算第二步:高差闭合差的调整各测段实测高差加改正数,得改正后的高差h i第三步:待定点高程的计算根据改正后的高差h i,由起始点Ⅲ18开始,逐点推算出各点的高程,列入表中最后算得的Ⅲ19点的高程应与已知的高程HⅢ19相等,否则说明闭合水准路线闭合水准路线的成果计算与附合水准路线基本相同,不同之处是检核条件与附合水准路线不同。
导线简易平差方法
角度 改正值
″
坐标 方位角
°′″
距离
D(m)
纵坐标增量值 纵坐标值 横坐标增量值 横坐标值
△X(m)
∨X (mm)
X,N(m)
△Y(m)
∨Y (mm)
Y,E(m)
3
4
5
6
7
8
9
10
11
9
20
9
104 297.260
9
72 187.812
9
106 93.400
9
6 150.642 149.714
283
1864.222 1970.220
287.788 178.868 89.593 16.692
1413.350 1986.385
总和 803 45
n= 5
辅 助 计 算
fβ= -45″ 检核fβ=± 40″ 5 = 89″
X,N(m)
△Y(m)
∨Y (mm)
Y,E(m)
3
4
5
6
7
8
9
10
11
9
20
1864.222
1413.350
9
104 297.260 74.441 60
x理 xc xB
y理 yc yB
由于调整后的各转折角和实测的各导线边长均含有误差,导致由它们为基础计算的各边纵、 横坐标增量,其代数和不等于附合导线终点和起点的纵、横坐标之差,差值即为纵、横坐标增量 闭合差 f x 和 f y ,即:
f x x x理 x ( xC xB ) f y y y理 y ( yC yB )
,按方位角公式推算出终边CD的坐标
附和导线平差计算详细教程,留着慢慢学习!
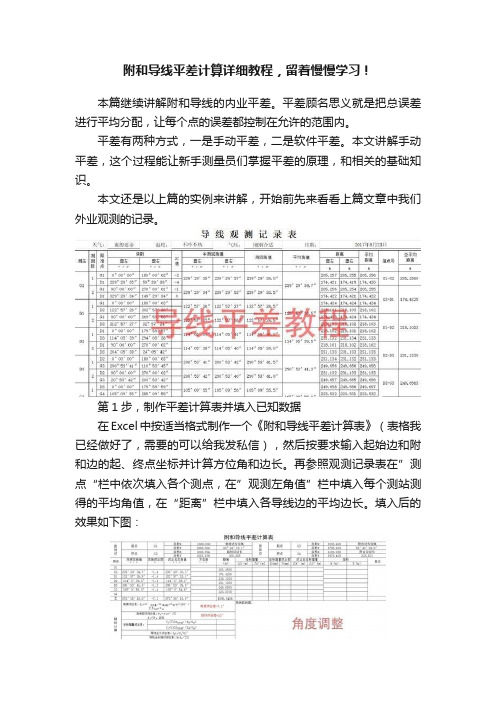
附和导线平差计算详细教程,留着慢慢学习!本篇继续讲解附和导线的内业平差。
平差顾名思义就是把总误差进行平均分配,让每个点的误差都控制在允许的范围内。
平差有两种方式,一是手动平差,二是软件平差。
本文讲解手动平差,这个过程能让新手测量员们掌握平差的原理,和相关的基础知识。
本文还是以上篇的实例来讲解,开始前先来看看上篇文章中我们外业观测的记录。
第1步,制作平差计算表并填入已知数据在Excel中按适当格式制作一个《附和导线平差计算表》(表格我已经做好了,需要的可以给我发私信),然后按要求输入起始边和附和边的起、终点坐标并计算方位角和边长。
再参照观测记录表在”测点“栏中依次填入各个测点,在”观测左角值”栏中填入每个测站测得的平均角值,在“距离”栏中填入各导线边的平均边长。
填入后的效果如下图:注:已知边的方位角和边长的计算方式很多,比如用5800计算器的Pol函数,道路之星的测站、CASS查询等。
第2步,计算角度闭合差计算角度闭合差,是为了检验外业角度观测的精度是否满足相应等级导线的技术要求。
如果实测的角度闭合差<>相关计算公式:实测角度闭合差=实测附和边方位角-理论附和边方位角实测附和边方位角=起始边方位角-N*180+实测左角值之和容许角度闭合差各等级导线有相应规定(各等级导线的技术要求在上篇文章中)。
注:N为测量站数,方位角取值范围是0度(含)到360度(不含),大于360度的减去360度,小于0度的加上360度。
本案例经计算:角度闭合差=7.1秒,容许闭合差=22秒,观测精度合格。
第3步,计算左角改正数经过角度闭合差的计算,确定外业成果合格后,就要计算左角改正数。
左角改正数=角度闭合差的相反数/测站个数改正后左角值=观测左角值+左角改正数本案例角度闭合差=7.1秒,那么左角改正数=-7.1/5=-1.42秒。
分配说明:为尽量平均分配误差,我们可将改正数保留1位小数,所以案例中每个测站分配-1.4秒,这时还有0.1秒未得到分配。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[管理]附合导线平差步骤
控制点坐标平差处理
城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。
本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。
导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。
计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。
在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。
如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下:
(1)填表。
计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。
(2)角度闭合差的计算与调整。
如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角:
α,α,180?,βA1BAA
α,α,180?,β12A11
α,α,180?,β2C122
′,)α,α,180?,βCD2CC
′α,α,4?180?,?βCDBA测左
计算终边坐标方位角的一般公式为:
α′,α,n?180?,?β (2-5)终边始边测左
式中n为导线观测角个数。
角度闭合差的计算公式为:
f,α′,α (2-6)β测终边终边
图2-21 附合导线计算示意图
角度闭合差f的大小,表明测角精度的高低。
对于不同等级的导线,有不β同的限差(即f)要求,例如图根导线角度闭合差的允许值为:β容
nf,?60″ (2-7)β容
,+41″, f式中n为多边形内角的个数。
这一步计算见辅助计算栏,fββ测,?120″。
容
若f?f,说明测角精度符合要求,此时需要进行角度闭合差的调整。
β测β容
调整是应注意:当用左角计算α′时,改正数的符号与f符号相反;当用右终边β测角计算α′时,改正数的符号与f符号相同。
可将闭合差按相反符号平均分终边β测
配给各观测角,而得出改正角:
β,β,f/n (2-8)测β测
式中n为多边形内角的个数。
按(,f/n)式计算的改正数,取位至秒,填β测入表格第3列。
当f,f时,则说明测角误差超限,应停止计算,重新检测角度。
β测β容
(3)坐标方位角的推算
根据起始边的坐标方位角及改正角,用(2-5)式依次计算各边的坐标方位
角,填入第5列。
为了检核,最后应重新推算结束边的坐标方位角,它应与已知
数值相等。
否则,应重新推算。
例如
′α,α,180?,β,139?50′18″,180?,49?02′38″,8?52′2CCCD
55″
(4)坐标增量的计算及闭合差调整
坐标增量计算,就是根据已经推算出的导线各边的坐标方位角和相应边的边长,按式(2-9)、(2-10)计算各边的坐标增量。
ΔX=D?cosα (2-9)ABABAB
ΔY=D?sinα (2-10)ABABAB
式中,D为直线AB的边长,α 为直线AB的坐标方位角,ΔX、ΔY称ABABABAB为坐标增量,也就是直线两端点A、B的坐标值之差。
例如,导线边12的坐标增量为:
Δx,D?COSα,189.11?COS103?03′52″,,42.75m121212
Δy,D?SINα,189.11?SIN103?03′52″,,148.22m121212
同法可算得其它各导线边的坐标增量,填入表中第7、8两列。
按附合导线的要求,各边坐标增量代数和的理论值,应等于终、起两点的已知坐标值之差。
因此,纵、横坐标增量闭合差可按下式计算
f,?Δx―(x―x) (2-11)x测终起
f,?Δy―(y―y) (2-12)y测终起
表中,fx,,0.21m,fy,?Δy测,+0.11m。
22f,f,fxy导线全长闭合差 ,0.24m。
仅以f值的大小还不能显示导线测量的精度,应当以f与导线全长?D相比较,即以分子为1的分数来表示导线全长的相对闭合差K,即
f1 (2-13)K,,DD,,
f
表中,K,0.24/572.75,1/2300。
以相对闭合差K衡量导线测量的精度,K的分母越大,精度越高。
不同等级的导线,其允许相对闭合差K不一样,图根导线的K为1/2000。
若K超过K,容容容则说明成果不合格,应首先检查内业计算有无错误,然后检查外业观测成果,必要时进行重测。
若K不超过K,则说明符合精度要求,可以进行调整。
即将f、f反符号,容xy按边长成正比分配到相应边的纵、横坐标增量中去,从而得到改正后的纵、横坐标增量。
(5)计算各导线点的坐标
根据后一点的坐标及改正后的坐标增量,按下式即可推算出前一点的坐标。
X,x,Δx (2-14)前后改
Y,y,Δy (2-15)前后改
最后,还应推算出终止边上C点的坐标,其值应与原有值相等,以作检核。
在导线的全部计算过程中,应坚持步步有检核的原则,后一步未检核合格,不能进行前一步计算工作。
表2-19 附合导线计算表
观测角改正数改正后角度坐标方位角距离坐标增量(m) 改正后增量(m) 坐标值(m) 点号点号′′ ?′″ ″ ? ′″ ? ′ ″ (m) ?x ?y?x ?y x y
B B 149 40 00 A 168 03 24 -10 168 03 14 -9 -4 1453.84 2709.65 A 137
43 14 236.02 -174.62 +158.78 -174.71 +158.74 1 145 20 48 -10 145 20 38 -7 1279.13 2868.39 1 -4 103 03 52 189.11 +148.22 -42.75 -42.82 +184.18 2 216 46 26 -10 216 46 16 -5 -3 1236.31 3052.57 2 139 50 18 147.62 -112.82 +95.21 -112.87 +95.18 C 49 02 48 -11 49 02 38 1123.44 3147.25 C 8 52 55 D D
-330.4438.1总和 579 02 48 -41 573 12 55 572.75 -330.19 +438.21 -330.40 438.10 00 0
f,α′,α,8 ?53′ 36″,8 ?52′ 55″,+41″ β测终边终边
f,?60?,?120″ f,f 合格。
β容ββ容4
f,?Δx―(x―x),+0.21m f,?Δy―(y―y),+0.11m x测终起y测终起辅助计算22 fffm,,,,0.24xy
1 K,K 合格。
容f0.241容K,K,,,,2000D572.752300。