2015年全国大学生数学建模比赛A题一等奖论文
2015数学建模竞赛优秀论文
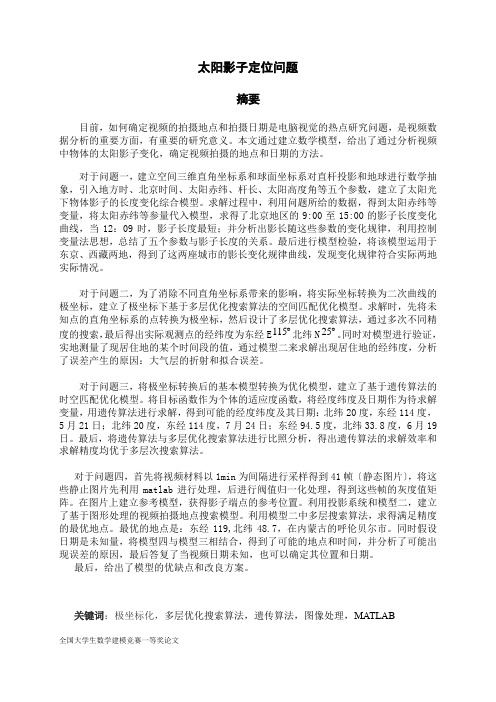
图 2 太阳高度角
由三角形性质,显然,
OB
tan θ =
(1)
OA
即得,
OB H
L = OA =
=
(2)
tan θ tan θ
根据参考文献[1],太阳高度角θ的计算公式为:
sin θ = sin φ sin δ + cos φ cos δ cos σ
(3)
其中,φ为观测地地理纬度,δ为赤纬角,σ为时角。 参考文献[2]:所谓日面中心的时角,即从观测点天球子午圈沿天赤道量至太阳所在时圈的
图 1 夏半年日影运动
由于太阳和地球最短距离为1.471 × 108km,所以太阳光接近地球表面时可以近似看成 是平行光。参考文献[1],太阳高度角是指太阳光的入射方向和地平面之间的夹角,专业上 讲太阳高度角是指某地太阳光线与通过该地与地心相连的地表切线的夹角。如图(2)所 示,OB为竿长,OA为影长,θ即为太阳高度角。
4. 模型的建立
4.1. 问题一模型的建立
4.1.1. 立杆影长随参数变化的模型的建立 为了探求不同时间、不同经纬度下立杆影长的变化规律,我们建立以立杆为参考系的数
学模型。一年四季中除去春分、夏至、秋分、冬至以外,太阳相对于地球都不是严格由正东 向正西方向运动,因此立杆的影子变化不仅在于长度的改变,方向也在改变。同一天,随着 时间的推移,立杆的影子顶点应当是一个弧状轨迹。如图(1),为夏半年日影运动静态模 拟图。图中白色虚线表示影子顶点运动的部分轨迹。
太阳影子定位
摘要
本文通过分析影响立杆影长的相关参数的变化,建立了时间、太阳位置和影子轨迹关系 的数学模型,探究了影子变化的影响因素,以及通过影子变化如何确定拍摄时间和地点。
针 对 问 题1, 我 们 利 用 太 阳 高 度 角 的 定 义 及 太 阳 高 度 角 的 大 小 跟 赤 纬 角 、 时 角 、 当 地纬度相关,建立了影长关于太阳高度角、杆长、日期这三个因素变化的模型。然后依 据题目给定的参数利用MATLAB得到影长,并进行检验。结果显示2015年10月22日当天北 京时间9:00–15:00之间天安门广场上一根3米高的竿子在12:36分时取到最短影长为3.68米, 在9:00时取到最长影长为6.78米。
2015数学建模A题小论文
太阳影子定位模型摘要“日长影移”是生活中人人熟知的自然现象,这个词说明地面上的影子变化与太阳活动有着密切的联系。
而古代智慧的先民就利用了这个现象制作了日晷是最早且最精确的计时工具之一。
本文主要研究的是太阳影子定位问题,需要确定出太阳影长变化模型,通过逆向思维,借助直杆太阳影子变化建立数学优化模型推算出直杆的位置、日期等信息。
对于问题一,首先从对直杆长度,基于地理坐标,时间这三个影响影子长度的参数,计算出时角,赤纬角,太阳高度角,进而给出了影子长度与三个参数之间的关系式。
结果显示,影长对日期和时刻都呈现出先减小后增大的趋势;对杆长呈正比关系增长;对经度呈现先急剧增长到峰值再突变为0,而后突变到峰值后再急剧下降;对纬度呈缓慢上升趋势。
然后,根据附件 1 中提供的数据,画出了天安门广场上直杆的太阳影子分布曲线图。
对于问题二,使用最小二乘近似法以及遗传算法建立了一个完整的优化模型,将杆长与直杆地理纬度作为变量参数,进行 100 次迭代,得出 20 组可能的解,通过合理性比较得出最可能地点在海南岛东部对于模型的推广,根据物体采集到的太阳地理信息进行计算,可以应用到求建筑物群合理间距问题。
以保证不同楼层,不同地区住户的采光质量。
关键词:正比;峰值;最小二乘法;遗传算法。
一、问题的重述1.1问题的背景现代科技的发展使得人们能够更为方便地记录高质量的视频文件。
在分析视频材料时,有时需要确定视频的拍摄地点及日期,而利用天文学知识,对视频物体中的太阳影子变化进行分析是确定视频拍摄地点及日期的一种方法。
1.2要解决的问题根据题中所给信息,本文将问题细化为以下五个问题,并建立数学模型进行分析和研究。
问题一:以北京 9:00 15:00 为时间,天安门广场(北纬3 9 5 4 2 6,东经1162329)为地点,建立描述影子长度变化的数学模型,分设若干参数分析高 3 米的直杆影子长度的变化规律;问题二:为了确定在水平地面上固定直杆的拍摄地点,以直杆的太阳影子顶点为坐标数据建立数学模型,并将建立的模型应用于附件1,求解出若干可能的拍摄地点;二、问题分析2.1问题一分析题目要求在固定地点,给定日期和杆长的条件下,求解出直杆投影长度的变化曲线。
全国大学生数学建模大赛国家一等奖论文A题
=
− − ( − 1)′
, = 1, 2, · · ·, 210
当逐渐增大,锚链受到的竖直向下方向的合力与支持力之差先逐渐接近于0,
再等于0,直至小于0。当合力小于0时,锚链以海床接触,此时海床提供向上的支持
力,其大小与′ 相等。因此可将小于0 的值都作零处理,故锚链接触海床时,
对于问题二,首先考虑第一个子问题,将风速36/直接代入问题一的模型中,
得出此条件下的吃水深度为0.723,各钢管倾斜角度(度)依次为8.960、9.014、9.068
、9.123,钢桶倾斜角(度)为9.179,锚链链接处的切线方向与海床的夹角(度)为18.414,
游动区域半径为18.80。发现此条件下,水声通讯系统设备的工作效果较差,且锚被
计与应用对海上科学发展有重要意义。
1.2 问题的提出
已知某近浅海传输节点(如图1所示),将浮标视作底面直径2为、高为2、质量
为1000的圆柱体,锚的质量为600,钢管共4节,每节长度为1,直径为50,
每节钢管的质量为10。水声通讯系统安装在一个长为1、外径为30的密封圆
柱形钢桶内,设备和钢桶总质量为100。
Step1: 遍历求解
令吃水深度ℎ的初始值为0.1,以0.0005为单位逐步增加至2。( 浮标高度为2,
完全浸没时吃水深度ℎ则为2 ),记录对应的数据,选取水下物体竖直方向高度和
与海域水深最接近的组别,进一步进行计算,结果如下表所示(具体程序见附录):
表 1: 不同风速的相关结果表
以风速24/的情况为例,绘制游动区域图:
题意的变量临界值。以水深16、系统各部分递推关系式和钢桶与竖直方向夹角小
于5°为约束条件,将多目标优化转化为单目标优化。通过调节决策变量中锚链的型
2015年全国大学生数学建模竞赛A题
§ 3 模型的假设
1、所收集的数据资料都是真实可靠的;
2
2、文章所统计的出租车均正常运营; 3、出租车和乘客不会中途中断交易; 4、假设乘客使用打车软件均呼叫出租车; 5、匹配程度只与乘客对打车软件服务平台的需求量与司机对打车软件服务平台的供给 量有关。
§ 4 名词解释与符号说明
一、名词解释 出行强度:每人每天出行次数,它可以反映城市交通服务水平; 出租车使用率:在各种出行方式中,选择出租车出行所占比例; 二、符号说明 序号 符号 含义 1 2 3 4 5 6 7 8 9 10 11 12 13 qij xi λi ci tj pij bj Amn α β y1 y2 te 表示第 i 个城市第 j 个时段出租车的需求量 表示第 i 个城市的人口数 表示第 i 个城市出行强度 表示第 i 个城市出租车使用率 表示第 j 个时段出租车需求比 表示第 i 个城市第 j 时段的匹配程度 表示第 j 个城市出租车总量 表示准则层对方案层的判断矩阵 表示乘客使用打车软件打车意愿 表示司机使用打车软件接单意愿 表示打车软件公司对乘客的补贴金额 表示打车软件公司对司机的补贴金额 表示某一时段出租车需求比
§ 5 模型的建立与求解
问题一的分析与求解 1、匹配程度时间函数模型 日常生活中,当需求与供给越接近,既不会造成需求得不到满足,也不会造成资源
3
浪费,同时表示此时匹配程度较好。由此说明匹配程度由需求和供给共同决定。所以建 立出租车匹配程度时间函数,需要出租车在所有出行方式中的占用率和出租车的总量。 查阅相关文献[1-2]可得以下数据,如表格 1 所示。 表格 1 基本数据 人口数 (万人) 出行强度 (次/人.天) 出 租 车 占 用 率 出租车总量(万 (%) 辆) 北京(1) 1917 2.64 9.01 6.6646 广州(2) 625.33 1.86 6.25 2.0300 成都(3) 533.96 2.56 7.60 1.4898 济南(4) 360 1.88 15.04 0.8043 哈尔滨(5) 495 2.54 18.23 1.4300 人们每日日常生活,相对比较规律,所以在出行规律也存在一定的相似性。我们通 过查阅相关文献[3],做出每天从早上 6:30 至晚上 22:00 每隔半小时的出租车需求百分比 图,如图 1 所示。
2015年全国大学生数学建模竞赛A题
太阳影子定位(一)摘要根据影子的形成原理和影子随时间的变化规律,可以建立时间、太阳位置和影子轨迹的数学模型,利用影子轨迹图和时间可以推算出地点等信息,从而进行视频数据分析可以确定视频的拍摄地点。
本文根据此模型求解确定时间地点影子的运动轨迹和对于已知运动求解地点或日期。
直立杆的影子的位置在一天中随太阳的位置不断变化,而其自身的所在的经纬度以及时间都会影响到影子的变化。
但是影子的变化是一个连续的轨迹,可以用一个连续的函数来表达。
我们可以利用这根长直杆顶端的影子的变化轨迹来描述直立杆的影子。
众所周知,地球是围绕太阳进行公转的,但是我们可以利用相对运动的原理,将地球围绕太阳的运动看成是太阳围绕地球转动。
我们在解决问题一的时候,利用题目中所给出的日期、经纬度和时间,来解出太阳高度角h,太阳方位角Α,赤纬角δ,时角Ω,直杆高度H和影子端点位置(x0,y o),从而建立数学模型。
影子的端点坐标是属于时间的函数,所以可以借助时间写出参数方程来描述影子轨迹的变化。
问题二中给出了日期和随时间影子端点的坐标变化,可以根据坐标变化求出运用软件拟合出曲线找到在正午时纵坐标最小,横坐标最大,影子最短的北京时间,根据时差与经度的关系,求出测量地点的经度。
根据太阳方位角Α,赤纬角δ,时角Ω,可以求出太阳高度角h。
再结合问题一中的表达式,建立方程求解测量地点的纬度Ф。
我们在求解第三问的思路也是沿用之间的模型,但第三问上需要解出日期。
对于问题四的求解,先获取自然图像序列或者视频帧,并对每一帧图像检测出影子的轨迹点;然后确定多个灭点,并拟合出地平线;拟合互相垂直的灭点,计算出仿射纠正和投影纠正矩阵;进而还原出经过度量纠正的世界坐标;在拟合出经过度量纠正世界坐标中的影子点的轨迹,利用前面几问中的关系求出经纬度。
关键字:太阳影子轨迹Matlab曲线拟合(二)问题重述确定视频拍摄地点和拍摄日期是视频数据分析的重要方面,太阳影子定位技术就是通过分析视频中物体的太阳影子变化,确定视频拍摄的地点和日期的一种方法。
2015年全国大学生数学建模比赛A题一等奖论文
太阳影子定位问题摘要目前,如何确定视频的拍摄地点和拍摄日期是电脑视觉的热点研究问题,是视频数据分析的重要方面,有重要的研究意义。
本文通过建立数学模型,给出了通过分析视频中物体的太阳影子变化,确定视频拍摄的地点和日期的方法。
对于问题一,建立空间三维直角坐标系和球面坐标系对直杆投影和地球进行数学抽象,引入地方时、北京时间、太阳赤纬、杆长、太阳高度角等五个参数,建立了太阳光下物体影子的长度变化综合模型。
求解过程中,利用问题所给的数据,得到太阳赤纬等变量,将太阳赤纬等参量代入模型,求得了北京地区的9:00至15:00的影子长度变化曲线,当12:09时,影子长度最短;并分析出影长随这些参数的变化规律,利用控制变量法思想,总结了五个参数与影子长度的关系。
最后进行模型检验,将该模型运用于东京、西藏两地,得到了这两座城市的影长变化规律曲线,发现变化规律符合实际两地实际情况。
对于问题二,为了消除不同直角坐标系带来的影响,将实际坐标转换为二次曲线的极坐标,建立了极坐标下基于多层优化搜索算法的空间匹配优化模型。
求解时,先将未知点的直角坐标系的点转换为极坐标,然后设计了多层优化搜索算法,通过多次不同精度的搜索,最后得出实际观测点的经纬度为东经E115︒北纬N25︒。
同时对模型进行验证,实地测量了现居住地的某个时间段的值,通过模型二来求解出现居住地的经纬度,分析了误差产生的原因:大气层的折射和拟合误差。
对于问题三,将极坐标转换后的基本模型转换为优化模型,建立了基于遗传算法的时空匹配优化模型。
将目标函数作为个体的适应度函数,将经度纬度及日期作为待求解变量,用遗传算法进行求解,得到可能的经度纬度及其日期:北纬20度,东经114度,5月21日;北纬20度,东经114度,7月24日;东经94.5度,北纬33.8度,6月19日。
最后,将遗传算法与多层优化搜索算法进行比照分析,得出遗传算法的求解效率和求解精度均优于多层次搜索算法。
对于问题四,首先将视频材料以1min为间隔进行采样得到41帧〔静态图片〕,将这些静止图片先利用matlab进行处理,后进行阀值归一化处理,得到这些帧的灰度值矩阵。
2015年全国大学生数学建模竞赛A题
太阳影子定位技术问题的数学模型摘要本文涉及的是太阳影子定位技术问题。
在已知视频中物体的太阳影子变化的情况下,要确定视频的拍摄地点和拍摄日期。
首先,分析了文中四个问题的关系,发现前三个问题的已知条件逐步减少,问题难度依次递进。
第四问则给出一个实际问题,该问题需要转化成数学模型利用前三问的方法求解;随后,建立了L-G模型、MinZ-模型等,并应用非线性最小二乘法、遗传算法等算法对模型求解。
得到基于模型的合理结果。
最后,将第四问的实际问题转化数学模型并求解,进而解决问题。
对于问题一,要解决的问题是杆长与影子长度的关系,根据天文、几何知识,我们建立了模型来刻画问题给出的参数之间联系,如赤纬角模型、时角模型、太阳高度角模型、影子长度模型(L-G模型)等;分析了各参数对影子长度的影响;最后运用MATLAB绘制出具体给定参数下的3米高直杆的影子变化曲线;从曲线可以看出在9:00到15:00这段时间里,影子长度先变短后变长,最短为3.627米,最长为7.182米。
问题二提供了一个关于时间、影子坐标的附件1,杆长未知,为了确定直杆所处的地点,本问建立了MinZ-模型,首先将经度、纬度、杆长离散化,搜索出大概的可行解,然后运用非线性最小二乘算法,选取matlab中的lsqcurvefit命令,以可行解为初值,再运用非线性最小二乘算法,选取MATLAB中的lsqcurvefit命令,在控制残差在10−8之内范围的情况下得到了三个可能地点皆在海南省昌江县内,最小误差的地点为海南省江黎族自治县,北纬19.3025°,东经108.6988°,此时对应直杆高度为2.0219m。
同时,将结果代入问题一的模型进行检验,验证了模型的稳定性和算法的合理性。
问题三沿用问题一的模型和问题二的算法,由于一个已知量变成一个变量,根据算法特点,在增加一个变量的情况下,算法搜索影长差时只需要增加一重循环。
关于附件2数据,残差最小对应的位置为北纬39.8926°,东经79.7438°,具体地点在新疆维吾尔自治区喀什地区巴楚县。
2015年数学建模全国一等奖论文
t (ts t 0) (tt 12)
其中 ts 为时间,t 为时差,t0 为最低点时间,t 北为对应的北京时间。 计算出时差 t 。 (3) 经度的求解 已知两地经度相差 1 度,时间相差 4 分钟,所以可列出:
(11)
北
ts
4
(12)
其中 γ 为当地经度,γ 北为北京经度,ts 为时差。 通过公式(12)解得经度 γ (4)纬度的求解 太阳方位角就是太阳在方位上的角度,它和坐标有以下关系:
7
7
6.5
6
影长 L
5.5
5
4.5
4
3.5 9
10
11
12 时间 t
13
14
15
图5
北京 10 月 22 日影长变化
5.2
问题二:
5.2.1 模型的准备
模型建立之前,我们分析数据得到所给影子顶点坐标并非以标准的东西南北 方向坐标系下的坐标, 所以我们必须进行矫正,把坐标系修正成正南正北的坐标 系。而后确定时差来确定经度,进而得到纬度。
(8)
(9)
获得新的坐标(x1,y1) 。 注:矫正坐标系以东西方向为 x 轴,南北方向为 y 轴。
图6
8
(2) 时差的求解 通过所给坐标在 matlab 中进行拟合,得到一条影长 L 关于时间 ts 的抛物线 方程: L=ats2-bts+c 其中 L 为影长,t 为时间。 解出最低点坐标 t0,利用北京时间 12:00 时影子最短,利用比例关系 (10)
5.1.3 模型的求解
模型中及为影长 L 和时间 t,纬度φ,以及日期 n 的函数关系。当其中两个 自变量确定后,就可建立影长 L 和另外一个自变量的模型。 (1) 影长 L 和时间 t 的模型 给定日期 n 和纬度φ, 模型就变成了影长 L 和时间 t 的一元函数, 应用 Matlab 即可得到影长的变化曲线。 在此,我们验证了赤道上 1 月 1 日的影长变化(如图 2) 由图可以看出,当 1 月 1 日时,9:00 到 15:00 的曲线为开口向上的抛物线, 在早上 9:00 时,由于太阳直射南半球,所以影子长,到了当地正午 12:00 时影子 最短,下午又开始增长,符合实际,模型基本成立。
2015年全国大学生数学建模竞赛A题优秀论文太阳影子定位模型教程
我们依据太阳位置算法[2]( SPA)得到太阳位置的几何模型图如图 1 所示:
图 1 太阳位置的几何模型
图中 为高度角, 为方位角, 为纬度角, 为赤纬角, 为太阳时角, 和 能由下列式子计算得到(公式来源:/1GU1iS):
(1.2)
其中 为一个参数,能通过如下公式得到
2 (d 1) 365
(1.3)
式中, h 为北京时间, 为当地经度, d 为日期,即 1 月 1 日就用 d 1来表
示,假设一年为 365 天,则 d 365表示 12 月 31 日。由式(1.1)可知,相邻两天的赤
纬角 差值几乎为 0,因此当闰年时,我们设定 2 月 28 日的 d 59 ,29 日时 d 59 ,
g( ) (0.006918 - 0.399912 cos( ) 0.070257 sin( ) - 0.006758 cos(2 ) 0.000907 sin(2 ) - 0.002697 cos(3 ) 0.00148 sin(3 ))
(1.1 )
h15 300
关键词:太阳位置算法 最小二乘法 遗传算法 太阳影子定位模型
一. 问题重述
1.1. 问题背景 如何确定视频的拍摄地点和拍摄日期是视频数据分析的重要方面,太阳影子定位
技术就是通过分析视频中物体的太阳影子变化来确定视频拍摄的地点和日期的一种方 法。 1.2. 问题提出 1. 建立影子长度变化的数学模型,分析影子长度关于各个参数的变化规律,并应用建
5.1.2. 模型求解
首先根据问题分析和模型,我们将观测日期代入得到赤纬角 21.8985 ,负号表
示太阳直射点在南半球,然后代入求出太阳时角 和高度角 在不同时刻的值,得到表
2015年数学建模国赛A题全国优秀论文40
三.模型假设
1.假设一天中的太阳赤纬角保持不变; 2.假设附件 4 中视频里的时间为北京时间; 3.假设大气层对太阳光的折射率保持不变; 4.假设影子长度和角度与该点的海拔无关;
四.符号说明
符号
h
表示含义 表示太阳高度角 表示修正后的太阳高度角 表示杆子的长度 表示杆子的影长 表示太阳赤纬角 表示某点的地理纬度 表示某点的地理经度 表示太阳时角 表示大气层的折射率 表示日期 表示某一具体时刻 表示太阳方位角
1
一.问题的背景与重述
1.1 问题的背景 早在 15 世纪时, 定位技术就已经随着海洋探索的开始而产生。 随着社会和科技的不 断发展,我们对定位的需求已不再局限于航海、航空等领域,对于地球上的精确坐标定 位已逐渐成为人们关注的热点问题。对于地球表面经纬度的精确定位,可利用变化的太 阳影子来进行分析,其作为一种直观简便的定位技术,已受到广泛关注。 1.2 问题的重述 太阳影子定位技术是通过分析视频中物体的太阳影子变化,确定视频拍摄的地点和 日期的一种方法,请建立合理的数学模型解决以下问题: 1.建立影子长度变化的数学模型,分析影子长度关于各个参数的变化规律,并根据 建立的模型画出 2015 年 10 月 22 日北京时间 9:00-15:00 之间天安门广场 (北纬 39 度 54 分 26 秒,东经 116 度 23 分 29 秒)3 米高的直杆的太阳影子长度的变化曲线。 2.根据某固定直杆在水平地面上的太阳影子顶点坐标数据,建立数学模型确定直杆 所处的地点,并将模型应用于附件 1 的影子顶点坐标数据,给出若干个可能的地点。 3. 根据某固定直杆在水平地面上的太阳影子顶点坐标数据, 建立数学模型确定直杆 所处的地点和日期,并将模型分别应用于附件 2 和附件 3 的影子顶点坐标数据,给出若 干个可能的地点与日期。 4.附件 4 为一根直杆在太阳下的影子变化的视频,并且已通过某种方式估计出直 杆的高度为 2 米。请建立确定视频拍摄地点的数学模型,并应用该模型给出若干个可能 的拍摄地点。如果拍摄日期未知,是否可以根据视频确定出拍摄地点与日期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
太阳影子定位问题摘要目前,如何确定视频的拍摄地点和拍摄日期是计算机视觉的热点研究问题,是视频数据分析的重要方面,有重要的研究意义。
本文通过建立数学模型,给出了通过分析视频中物体的太阳影子变化,确定视频拍摄的地点和日期的方法。
对于问题一,建立空间三维直角坐标系和球面坐标系对直杆投影和地球进行数学抽象,引入地方时、北京时间、太阳赤纬、杆长、太阳高度角等五个参数,建立了太阳光下物体影子的长度变化综合模型。
求解过程中,利用问题所给的数据,得到太阳赤纬等变量,将太阳赤纬等参量代入模型,求得了北京地区的9:00至15:00的影子长度变化曲线,当12:09时,影子长度最短;并分析出影长随这些参数的变化规律,利用控制变量法思想,总结了五个参数与影子长度的关系。
最后进行模型检验,将该模型运用于东京、西藏两地,得到了这两座城市的影长变化规律曲线,发现变化规律符合实际两地实际情况。
对于问题二,为了消除不同直角坐标系带来的影响,将实际坐标转换为二次曲线的极坐标,建立了极坐标下基于多层优化搜索算法的空间匹配优化模型。
求解时,先将未知点的直角坐标系的点转换为极坐标,然后设计了多层优化搜索算法,通过多次不同精度的搜索,最后得出实际观测点的经纬度为东经E115︒北纬N25︒。
同时对模型进行验证,实地测量了现居住地的某个时间段的值,通过模型二来求解出现居住地的经纬度,分析了误差产生的原因:大气层的折射和拟合误差。
对于问题三,将极坐标转换后的基本模型转换为优化模型,建立了基于遗传算法的时空匹配优化模型。
将目标函数作为个体的适应度函数,将经度纬度及日期作为待求解变量,用遗传算法进行求解,得到可能的经度纬度及其日期:北纬20度,东经114度,5月21日;北纬20度,东经114度,7月24日;东经94.5度,北纬33.8度,6月19日。
最后,将遗传算法与多层优化搜索算法进行对比分析,得出遗传算法的求解效率和求解精度均优于多层次搜索算法。
对于问题四,首先将视频材料以1min为间隔进行采样得到41帧(静态图片),将这些静止图片先利用matlab进行处理,后进行阀值归一化处理,得到这些帧的灰度值矩阵。
在图片上建立参考模型,获得影子端点的参考位置。
利用投影系统和模型二,建立了基于图形处理的视频拍摄地点搜索模型。
利用模型二中多层搜索算法,求得满足精度的最优地点。
最优的地点是:东经119,北纬48.7,在内蒙古的呼伦贝尔市。
同时假设日期是未知量,将模型四与模型三相结合,得到了可能的地点和时间,并分析了可能出现误差的原因,最后回答了当视频日期未知,也可以确定其位置和日期。
最后,给出了模型的优缺点和改进方案。
关键词:极坐标化,多层优化搜索算法,遗传算法,图像处理,MATLAB1.问题重述1.1问题背景随着现代科技的发展,日常生活中摄像机的应用越来越普遍。
无论是个人家庭还是组织单位,都通过摄像机来录制各种视频以分享信息,例如实时视频监控、记录自然景观、观测气象信息等。
而通过视频来确定拍摄地点的地理位置信息是目前计算机视觉领域的热点研究问题之一。
一个视频的地理位置能够提供当地气候、平均温度、平均降雨量、植物索引、地表概况、海拔高度和人口密度等大量背景信息[1]。
因此从视频中确定地理位置是一项有很大潜力应用空间的技术。
1.2问题描述视频数据分析是视频处理过程中的重要环节,而如何确定视频的拍摄地点和拍摄日期是视频数据分析的重要方面。
太阳影子定位技术就是通过分析视频中物体的太阳影子变化,确定视频拍摄的地点和日期的一种方法。
试建立数学模型讨论下列问题:1.建立影子长度变化的数学模型,分析影子长度关于各个参数的变化规律,并应用所建立的模型画出2015年10月22日北京时间9:00-15:00之间天安门广场3米高的直杆的太阳影子长度的变化曲线。
2.根据某固定直杆在水平地面上的太阳影子顶点坐标数据,建立数学模型确定直杆所处的地点。
将模型应用于附件1的影子顶点坐标数据,给出若干个可能的地点。
3. 根据某固定直杆在水平地面上的太阳影子顶点坐标数据,建立数学模型确定直杆所处的地点和日期。
将模型分别应用于附件2和附件3的影子顶点坐标数据,给出若干个可能的地点与日期。
4.附件4为一根直杆在太阳下的影子变化的视频,并且已通过某种方式估计出直杆的高度为2米。
请建立确定视频拍摄地点的数学模型,并应用此模型给出若干个可能的拍摄地点。
如果拍摄日期未知,能否根据视频确定出拍摄地点与日期?2.问题分析2.1问题一分析问题一要求分析投影长度随各参数的变化规律,建立影子长度变化的数学模型。
首先对直杆建立空间三维坐标系,将地球简化成规则球体建立球面坐标系。
在这两个坐标系中,通过几何证明,运用向量知识可分析出影响影子长度的各种参数,得出地球上某日白天某时刻影子顶端在地平面上的具体位置,由此可以给出影子长度的变化规律。
2.2问题二分析问题二要求根据某固定直杆在水平地面上的太阳影子顶点坐标数据及日期数据,建立数学模型确定直杆所处的地点。
与第一问有相似之处,但分析附件所给数据,发现附件中只给出x 、y 坐标值,而并没有给出xy 轴的准确方向,所以考虑将直角坐标转换成极坐标,来消除由于不同坐标系选取所造成的影响。
2.3问题三分析问题三与问题二有相似处,区别是第三问附件没有提供日期,需要根据直杆影子端点坐标确定直杆所在地点的经纬度和日期。
具体的日期可以由太阳直射点纬度来确定,而根据问题二中的模型,xy 坐标与太阳直射点纬度有关。
如果继续用第二问的模型来求解,需要不断改变太阳直射点纬度来拟合极坐标方程,这样做算法复杂度会很大。
所以考虑对问题二模型进行修改,不采用拟合,而直接建立与待求点经纬度以及日期有关的目标函数,通过约束经纬度范围来缩小待求点的可行域,从而简化算法复杂度。
2.4问题四分析问题四中,直接以视频的方式给出了固定杆长的距离变化规律。
将图片形式的影长变化规律以坐标的形式进行转换,转换为现实的坐标形式。
这样就可以利用问题二的模型,整合现有的算法,求出拍摄地点。
3. 模型假设与符号系统3.1模型的假设(1)假设地球为一个规则的球体。
(2)由于日地距离远大于地球半径,所以假设太阳光线为平行光。
(3)假设地球上某地的水平地面是地球球面上过该地的切面。
(4)假设不考虑太阳光线穿过大气层时所发生的折射。
(5)假设一天中太阳直射点的纬度不变。
(6)假设不考虑太阳的视面角、高山阻挡、海拔高度等因素的影响。
(7)假设不考虑阴天没有阳光的情况。
3.2符号系统问题一符号系统符号 意义 单位α 直杆所在地纬度值 度β 太阳直射点的纬度 度θA 、B 两地经度差 度 ϕ 太阳光线与直杆的夹角 度h直杆长度 米 L 直杆影长 米 t 0t 地方时 北京时间 时时E直杆所在地的经度度问题二、三符号系统符号意义单位α直杆所在地纬度值度β太阳直射点的纬度度y附件1中第一组坐标的y值米1ρ极径h直杆长度米θ极角度问题四符号系统符号意义单位L固定杆长度米k实际长度与灰度值坐标下的转换比例P投影系统4.问题一的建模与求解4.1问题分析在问题一中,为了描述直杆影子长度变化的动态过程,首先以直杆为z轴,建立空间三维坐标对直杆影子的变化进行数学抽象。
再将地球作为规则球体建立球面坐标系,利用空间解析几何与平面解析几何的知识,对两个坐标系中的相关向量与角度进行分析,分析出影响影子长度的参数,得到影子端点在坐标系中的位置表达式。
由此可以求出影子长度随各个参数的变化规律。
建模流程图如下所示:图4.1问题一建模流程图4.2模型准备为了建模的方便,先给出一些地理名词的解释和一些数据的预处理方法。
4.2.1名词解释[6]地方时:以一个地方太阳升到最高的地方时间为正午12时,将连续两个正午12时之间等分为24个小时,所成的时间系统。
它是观测者所在的子午线的时间。
北京时间:是中国采用北京时区的区时作为标所在的东八准时间。
北京时间并不是北京(东经116.4°)地方的时间,而是东经HF 120°地方的地方时间。
太阳赤纬:是地球赤道平面与太阳和地球中心的连线之间的夹角。
太阳直射点:地球表面太阳光射入角度(即太阳高度角 )为90度的地点,它是地心与日心连线和地球球面的交点。
太阳高度角:对于地球上的某个地点,太阳高度角是指太阳光的入射方向和地平面之间的夹角;专业上讲是指某地太阳光线与通过该地与地心相连的地表切线的夹角。
4.2.2数据预处理(1)经纬度转换在问题一中,天安门广场的坐标是用经纬度(度分秒)的形式给出的。
为了下面建模求解的方便,将其统一转换成以“度”为单位。
换算方法为:分位数除以60,秒位数除以3600。
所以,天安门广场的纬度可以转换为:395426=39+5460+263600=39.907'''︒÷÷︒经度可以转换为:1162329=116+2360+293600=116.391'''︒÷÷︒(2)北京时间与地方时的转换[9]问题中所给出的时刻为北京时间,而北京时间指的是东经120°地方的地方时,并不是问题中地点的地方时。
所以先要将所给的北京时间转换成相应的地方时。
转换规则为:东经度<120度地区,每减少1度,减4分钟;东经度>120度地区,每增加1度,加4分钟。
所以有转化公式:00(E 120)*4,E 120=(120E)*4E 120t t t +->⎧⎨--<⎩, 其中,E 表示直杆所在地点的经度,0t 是北京时间,t 是直杆所在地方的地方时。
用此公式对问题一中的北京时间进行操作,得到直杆所在地的地方时,如下表所示:要研究影子的变化,需要建立空间三维坐标对直杆影子的变化进行数学抽象。
通过对直杆和地球分别建立了两个空间直角坐标系,用空间解析几何和向量知识,可以确定两个坐标系上各点之间的位置和角度关系。
4.3.1建立直杆处空间三维坐标系根据假设,视太阳光线为平行光,以直杆所在地点的正东方向为x 轴,以正北方向为y 轴,以直杆直立即垂直于0x y 平面的方向为z 轴,建立空间直角坐标系,得到直杆在0x y 平面的投影与光线的位置关系,如下图所示:图4.2 直杆空间三维坐标系其中,AE 是与过A 处的经线相切的方向向东的单位向量;AK 是A 处地平面内方向向北的单位向量。
AH 是A 处垂直于xOy 平面的直杆,AF 是该直杆在xOy 平面内的投影,HF 是当天太阳光线的照射方向,照射方向与直杆所成角度FHA ϕ∠=。
4.3.2建立直杆在地球上的宏观空间球面坐标系根据假设,可视地球为规则球体1O ,过直杆底端A 处的经线与赤道交于D 点,B 点为某日的太阳直射点,过B 点的经线与赤道交于C 点。