科比伺服器调试及维修参数调节共20页文档
科比F4变频器数字量控制参数表简易操作
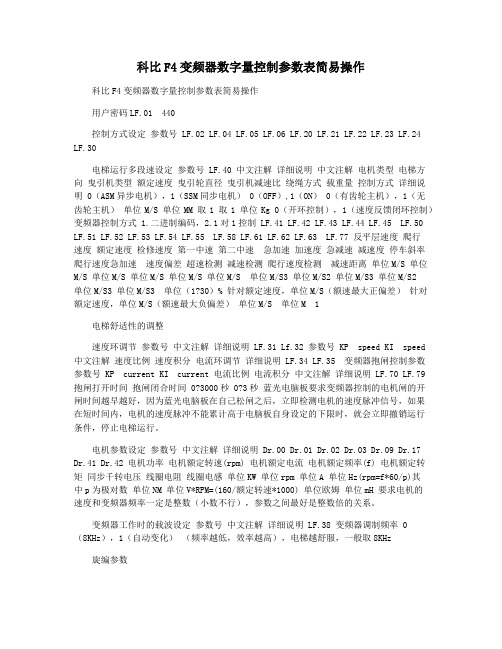
科比F4变频器数字量控制参数表简易操作科比F4变频器数字量控制参数表简易操作用户密码LF.01 440控制方式设定参数号 LF.02 LF.04 LF.05 LF.06 LF.20 LF.21 LF.22 LF.23 LF.24 LF.30电梯运行多段速设定参数号 LF.40 中文注解详细说明中文注解电机类型电梯方向曳引机类型额定速度曳引轮直径曳引机减速比绕绳方式载重量控制方式详细说明 0(ASM异步电机),1(SSM同步电机) 0(OFF),1(ON) 0(有齿轮主机),1(无齿轮主机)单位M/S 单位MM 取1 取1 单位Kg 0(开环控制),1(速度反馈闭环控制)变频器控制方式 1.二进制编码,2.1对1控制 LF.41 LF.42 LF.43 LF.44 LF.45 LF.50 LF.51 LF.52 LF.53 LF.54 LF.55 LF.58 LF.61 LF.62 LF.63 LF.77 反平层速度爬行速度额定速度检修速度第一中速第二中速急加速加速度急减速减速度停车斜率爬行速度急加速速度偏差超速检测减速检测爬行速度检测减速距离单位M/S 单位M/S 单位M/S 单位M/S 单位M/S 单位M/S 单位M/S3 单位M/S2 单位M/S3 单位M/S2单位M/S3 单位M/S3 单位(1?30)% 针对额定速度,单位M/S(额速最大正偏差)针对额定速度,单位M/S(额速最大负偏差)单位M/S 单位M 1电梯舒适性的调整速度环调节参数号中文注解详细说明 LF.31 Lf.32 参数号 KP speed KI speed 中文注解速度比例速度积分电流环调节详细说明 LF.34 LF.35 变频器抱闸控制参数参数号 KP current KI current 电流比例电流积分中文注解详细说明 LF.70 LF.79 抱闸打开时间抱闸闭合时间 0?3000秒 0?3秒蓝光电脑板要求变频器控制的电机闸的开闸时间越早越好,因为蓝光电脑板在自己松闸之后,立即检测电机的速度脉冲信号,如果在短时间内,电机的速度脉冲不能累计高于电脑板自身设定的下限时,就会立即撤销运行条件,停止电梯运行。
伺服驱动器参数设置方法
伺服驱动器参数设置方法
伺服驱动器是现代自动化控制系统中的重要组成部分,其参数设置的合理与否直接影响到设备的运行效果和性能稳定性。
下面将介绍一种常见的伺服驱动器参数设置方法,希望对大家有所帮助。
首先,我们需要了解伺服驱动器的基本参数,包括电机型号、轴数、额定电流、额定转速等。
在进行参数设置之前,需要对这些基本参数有一个清晰的认识,这样才能更好地进行参数调整。
其次,根据实际的控制需求,对伺服驱动器的参数进行调整。
通常包括以下几个方面:
1. 速度环参数设置,包括速度环比例增益、速度环积分增益、速度环微分增益等。
这些参数的设置会直接影响到伺服电机的速度响应性能,需要根据实际情况进行合理调整。
2. 位置环参数设置,包括位置环比例增益、位置环积分增益、位置环微分增益等。
这些参数的设置会直接影响到伺服电机的位置精度和稳定性,需要根据实际控制要求进行调整。
3. 负载参数设置,包括负载惯量、负载摩擦力等。
这些参数的设置对于伺服电机的负载能力和动态性能有着重要影响,需要根据实际负载情况进行调整。
最后,进行参数调整后,需要进行系统的稳定性测试和性能验证。
通过对伺服驱动器进行负载试验、速度跟踪试验等,验证参数设置的效果是否符合实际控制要求,如果有需要,还可以进行进一步的参数微调。
总之,伺服驱动器参数设置是一个复杂而又关键的工作,需要结合实际情况进行合理调整,才能达到最佳的控制效果。
希望以上介绍对大家有所帮助,谢谢!
以上就是伺服驱动器参数设置方法的相关内容,希望对大家有所帮助。
伺服驱动器参数设置方法
伺服驱动器参数设置方法
1. 前期准备
根据伺服驱动器使用说明书来确认系统参数的设置范围,同时要了解所需参数的具体名称和作用。
在设置参数前,先停止伺服系统的运转。
2. 主伺服参数设置
主伺服参数指防护、速度、加速度等参数。
设置前,先按照使用说明书的要求选择相应的参数。
然后进行参数设置。
3. PID参数设置
PID参数设置包括比例系数、积分时间和微分时间三个参数。
一般情况下,这三个参数是配套使用的。
一般情况下,这三个参数都是需要根据实际情况进行调整的。
在设定前,先根据使用说明书选择相应的参数,然后调整PID参数,直到达到理想的运动效果。
4. 位置误差调整
基础参数调整完成后,要进行位置误差调整。
这时,可以手动转动伺服电机,观察位置误差变化。
这个过程中,要根据速度的变化,对位置误差进行调整,直到
达到预期效果。
5. 整机参数调整
完成单个电机的参数设定后,还需要对整个伺服系统进行参数调整。
整机参数包括系统响应速度、整机加速度等。
通过调整整机参数,可以使整个伺服系统的运动更加顺畅。
6. 参数测试
参数设置完成后,还需要对其进行测试,以验证是否满足了伺服系统的设计要求。
在测试过程中,可以根据需要逐步调整参数,以达到最佳效果。
伺服参数调节原则与方法
伺服参数调节原则与方法(总2页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除一.伺服驱动器对伺服电机的主要控制方式?位置控制、速度控制和转矩控制。
位置控制方式的特点:(机床设备等)是驱动器对电机的转速、转角和转矩均于控制,CNC对驱动器发脉冲串进行转速与转角的控制,输入的脉冲频率控制电机的转速,输入的脉冲个数控制电机旋转的角度。
脉冲频率f与电机转速n(rpm)、脉冲个数P与电机旋转角度β的关系参见下式:式中:G—电子齿轮比速度控制方式的特点:(传送带设备等)是驱动器仅对电机的转速和转矩进行控制,CNC对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机的转速。
电机的转角由CNC取驱动器反馈的A、B、Z编码器信号进行控制。
转矩控制方式的特点:(收放卷设备等)是驱动器仅对电机的转矩进行控制,电机输出的转矩不随负载改变,只听从于输入的转矩命令,CNC对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机输出的转矩。
电机的转速与转角由上位机控制。
二:什么是电子齿轮比(G)当机械装置的传动比不能满足数控装置脉冲当量的要求时,用电子齿轮比,来配合数控装置与机械传动比之间的关系,满足数控装置所需要的脉冲当量。
它起到了一个输入与输出变比的作用。
电子齿轮比仅在位置控制中起作用。
电子齿轮比数值设置过大,会降低伺服电机的运行状态。
脉冲当量(M):CNC每变化一个最小数字单位时,要求相应的机械装置有一个设定的长度或角度的相应变化,称为脉冲当量,如0.001mm。
电机每转脉冲数(P):电机旋转一圈电机反馈元件反馈的脉冲数,计算方式为电机编码器的线数的4倍。
如:360×4=1440,2500×4=10000等。
伺服科比伺服泵调试手册_新共31页PPT资料

Explain 实际速度 给定速度 变频器状态 实际电流 输入数字量状态 激活参数集
压力
流量 参数集指针 最大速度 加速时间 减速时间 速度KP值 速度KI值 KI偏置 弱磁控制 开关频率 额定电流 额定转速 额定频率
注:CP参数为用户模式,RU等参数为应用模式
Range
0~-56.5%(针对0~25Mpa 的传感器而言) 0~100% 0~3 0~2800 0.01~0.10 0.01~0.10 500~3000 200~1000 100~500 8 2~8
Name encoder 1 speed ramp output display inverter state apparent current input terminal state active parameter set
AN1 pre amplifier disp.
AN2 pre amplifier disp. indirect set pointer max. reference forward acc. time for. dec. time for. KP speed KI speed KI offset flux/rotor adaption mode switching frequency DSM rated current DSM rated speed DSM rated frequency
无线电干扰滤波器
对滤波器滤波效果的影响因素:
• 电机电缆长度
• 干扰器的数量 (变频器、开关电源、整流器) • 变频器的开关频率 • 电缆放置方式 • 滤波器接地、变频器接地、屏蔽接地
控制柜结构: 变频器运行的接线规则
1. 为限制干扰应用一个无线电干扰滤波器(单个或成组干扰抑制) 2.连接电机屏蔽电缆到 装置两侧一个大的接触面积 上(变频器和电机);连接控制屏蔽电缆到 变频器的 一侧 3. 在屏蔽层中断的情况下,在中断点的前和后连接 4. 控制柜内的金属控制部件用电镀的垫片和低阻抗、大面积的内部连线 5. 控制柜和机器底座之间用低阻抗、大面积的连接(电机外壳应该连接低阻抗、大面积的底座) 6.坚决不能报警线和干扰抑制线平行布置 (最好距离 > 20 cm) 7. 避免电缆弯成环行. 无用的电缆应两端接到同一电位上
教你设置伺服驱动器参数(附故障排查技巧)

教你设置伺服驱动器参数(附故障排查技巧)在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考。
然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
(1)位置比例增益设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
(2)位置前馈增益设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%(3)速度比例增益设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
(4)速度积分时间常数设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
(5)速度反馈滤波因子设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
如果需要较高的速度响应,可以适当减小设定值。
(6)最大输出转矩设置设置伺服驱动器的内部转矩限制值。
设置值是额定转矩的百分比,任何时候,这个限制都有效定位完成范围设定位置控制方式下定位完成脉冲范围。
伺服参数调节原则与方法
一.伺服驱动器对伺服电机的主要控制方式?位置控制、速度控制和转矩控制。
位置控制方式的特点:(机床设备等)是驱动器对电机的转速、转角和转矩均于控制,CNC对驱动器发脉冲串进行转速与转角的控制,输入的脉冲频率控制电机的转速,输入的脉冲个数控制电机旋转的角度。
脉冲频率f与电机转速n(rpm)、脉冲个数P与电机旋转角度β的关系参见下式:式中:G—电子齿轮比速度控制方式的特点:(传送带设备等)是驱动器仅对电机的转速和转矩进行控制,CNC对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机的转速。
电机的转角由CNC取驱动器反馈的A、B、Z编码器信号进行控制。
转矩控制方式的特点:(收放卷设备等)是驱动器仅对电机的转矩进行控制,电机输出的转矩不随负载改变,只听从于输入的转矩命令,CNC对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机输出的转矩。
电机的转速与转角由上位机控制。
二:什么是电子齿轮比(G)?当机械装置的传动比不能满足数控装置脉冲当量的要求时,用电子齿轮比,来配合数控装置与机械传动比之间的关系,满足数控装置所需要的脉冲当量。
它起到了一个输入与输出变比的作用。
电子齿轮比仅在位置控制中起作用。
电子齿轮比数值设置过大,会降低伺服电机的运行状态。
脉冲当量(M):CNC每变化一个最小数字单位时,要求相应的机械装置有一个设定的长度或角度的相应变化,称为脉冲当量,如0.001mm。
电机每转脉冲数(P):电机旋转一圈电机反馈元件反馈的脉冲数,计算方式为电机编码器的线数的4倍。
如:360×4=1440,2500×4=10000等。
丝杆螺距(L):指的是机械传动丝杆的螺纹之间的距离。
机械齿轮比(i):指的是减速机的机械齿轮比等。
电子齿轮比计算公式:G=(P ×M×i)÷L三:伺服驱动器速度环、位置环参数调整的原则是什么?伺服电机使用效果如何,除了与电机和驱动器的性能有关外,驱动器参数的调整也是一个十分关键的因素。
伺服驱动器参数设置方法
伺服驱动器参数设置方法(总2页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
1.位置比例增益:设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
2.位置前馈增益:设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%3.速度比例增益:设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
4.速度积分时间常数:设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
5.速度反馈滤波因子:设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
科比伺服器调试及维修参数调节
EMK电压常数 额定转矩 零速电流 定子电阻 电感 装载电机参数 PID kp PID ki PID kd 电机过热保护模式 电机参数自学习 电机自学习状态 编码器1方向和系统方向 编码器1绝对零位 软件开断使能 强制输出转速设定
1~2 2~15 0.5~10 0.5~10 6.7 0.7
0.1.16.17 2206 0~1 0~1000
调试步骤
1. 断开使能(端子16-20) 2. 设定电机参数:dr23-CP31;电机参数参考下页 3. 适配电机参数,Fr10:2 4. 找电机零位,参考下页(如零位已知跳过此步) 5. 设定di01:1(软件断开使能) 6. 设定最大速度=所需最大流量/油泵排量(步骤:(set1.2.)oP10=最大速度) 7. 调整给定压力、流量电压:ru27对应给定压力,0kgf对应为0,140kgf给
调试步骤
12. 设定20kgf压力,20流量,观察压力表压力;如果压力表正常则表示电机 转向正确,系统基本正常,转14;如没有压力,转13
13. 如果压力表没有压力,首先观察ru09(编码器速度)是否正常,再确认 给油阀是否打开,然后是安全阀是否关闭;如果以上都正常,则更改系 统方向(Ec06:1,CP33加或减16,CP35:0),转12
科比伺服泵调试手册
EMK电压常数 额定转矩 零速电流 定子电阻 电感 装载电机参数 PID kp PID ki PID kd 电机过热保护模式 电机参数自学习 电机自学习状态 编码器1方向和系统方向 编码器1绝对零位 软件开断使能 强制输出转速设定
ANTRIEBSTECHNIK
1~2 2~15 0.5~10 0.5~10 6.7 0.7
电控箱设计和接线注意
ANTRIEBSTECHNIK
• 伺服控制器部件与PLC等其它元器件分开安装 • 强电与弱电分开走线,有交叉需垂直走线 • 控制器安装背板请使用镀锌板,滤波器,电抗器,制动
电阻都安装在这张板上;在这张板上设计一个接地铜牌 ,各部件地线连接到铜牌上。 • 三相电机线最好采用屏蔽线,没有屏蔽线必须采用金属 套管,屏蔽层变频器端单端接地。 • 压力、流量和压力传感器信号必须采用屏蔽线,屏蔽层 变频器端单端接地。
Explain 实际速度 给定速度 变频器状态 实际电流 输入数字量状态 激活参数集 压力 流量 参数集指针 最大速度 加速时间 减速时间 速度KP值 速度KI值 KI偏置 弱磁控制 开关频率 额定电流 额定转速 额定频率
ANTRIEBSTECHNIK Range
0~-56.5% 0~100% 0~3 0~2800 0.01~0.10 0.01~0.10 500~3000 200~1000 100~500 8 2~8
定时应显示为-56;ru29对应给定流量,0对应为0,99流量显示为100;测 试注射信号,按注射时ru26显示为:17:ST+I1 8. 设定di01:0,ru00变频器状态应为Fcon 9. 再次观察ru27和ru29的数值变化,如果波动大于0.3则模拟量干扰太大, 需改进EMC(接地和屏蔽等) 10. 上位控制器压力流量斜率设置:设为0.03,在调试时如果某个动作震动过 大,适当增大斜率 11. 在注射前后必须留有0.03的时间流量为零
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AN TR IEB S TE C H N IK
KEB伺服控制器
伺服节能注射机-液压控制系统单元的革命性突破 -伺服精密、快速响应、节能环保
强电接线端子
AN TR IEB S TE C H N IK
L1,L2,L3: 三相进线 ++,PB : 制动电阻 ++,-- : 直流母线 T1,T2 : 电机温度PTC检测 U,V,W : 到电机出线 PE : 接地和屏蔽
AN TR IEB S TE C H N IK
电控箱设计和接线注意
AN TR IEB S TE C H N IK
• 伺服控制器部件与PLC等其它元器件分开安装 • 强电与弱电分开走线,有交叉需垂直走线 • 控制器安装背板请使用镀锌板,滤波器,电抗器,制动
电阻都安装在这张板上;在这张板上设计一个接地铜牌 ,各部件地线连接到铜牌上。 • 三相电机线最好采用屏蔽线,没有屏蔽线必须采用金属 套管,屏蔽层变频器端单端接地。 • 压力、流量和压力传感器信号必须采用屏蔽线,屏蔽层 变频器端单端接地。
0.1.16.17 2206 0~1 0~1000
调试步骤
AN TR IEB S TE C H N IK
1. 断开使能(端子16-20) 2. 设定电机参数:dr23-CP31;电机参数参考下页 3. 适配电机参数,Fr10:2 4. 找电机零位,参考下页(如零位已知跳过此步) 5. 设定di01:1(软件断开使能) 6. 设定最大速度=所需最大流量/油泵排量(步骤:(set1.2.)oP10=最大速度) 7. 调整给定压力、流量电压:ru27对应给定压力,0kgf对应为0,140kgf给
CP21 CP22 CP23 CP24 CP25 CP26 CP27 CP28 CP29 CP30 CP31 CP32 CP33 CP34 CP35 CP36
dr26 dr27 dr28 dr30 dr31 Fr10 cn04 cn05 cn06 Pn12 dr48 dr62 ec06 ec02 di01 oP21
定时应显示为-56;ru29对应给定流量,0对应为0,99流量显示为100;测 试注射信号,按注射时ru26显示为:17:ST+I1 8. 设定di01:0,ru00变频器状态应为Fcon 9. 再次观察ru27和ru29的数值变化,如果波动大于0.3则模拟量干扰太大, 需改进EMC(接地和屏蔽等) 10. 上位控制器压力流量斜率设置:设为0.03,在调试时如果某个动作震动过 大,适当增大斜率 11. 在注射前后必须留有0.03的时间流量为零
CP定义
DSM EMK voltage constant DSM rated torque DSM curr. f. zero speed DSM stator resistance DSM inductance load mot.depentant para PID kp PID ki PID kd warning dOH stop.mode Motor identification State motor identification Encoder1 rotation Absolute pos. enc.1 Select signal source Step value 1
强电接线
AN TR IEB S TE C H N IK
弱电接线端子
AN TR IEB S TE C H N IK
1 : 模拟量1正 2 : 模拟量1负 3 : 模拟量2正 4 : 模拟量2负
16 : 使能 20 : 24V参考电源输出 21 : 外部24V电源输入 22 : 数字电源地
控制端子实际接线
编码器连接 Resolver
AN TR IEB S TE C H z CP1 CP2 CP3 CP4 CP5 CP6 CP7 CP8 CP9 CP10 CP11 CP12 CP13 CP14 CP15 CP16 CP17 CP18 CP19 CP20
ID. ru09 ru02 ru00 ru15 ru21 ru26 ru27 ru29 Fr09 oP10 oP28 oP30 cS06 cS09 cS10 ds04 uF11 dr23 dr24 dr25
CP定义
Name encoder 1 speed ramp output display inverter state apparent current input terminal state active parameter set AN1 pre amplifier disp. AN2 pre amplifier disp. indirect set pointer max. reference forward acc. time for. dec. time for. KP speed KI speed KI offset flux/rotor adaption mode switching frequency DSM rated current DSM rated speed DSM rated frequency
Explain 实际速度 给定速度 变频器状态 实际电流 输入数字量状态 激活参数集 压力 流量 参数集指针 最大速度 加速时间 减速时间 速度KP值 速度KI值 KI偏置 弱磁控制 开关频率 额定电流 额定转速 额定频率
RAaNnTgRe IE B S T E C H N IK
0~-56.5% 0~100% 0~3 0~2800 0.01~0.10 0.01~0.10 500~3000 200~1000 100~500 8 2~8
EMK电压常数 额定转矩 零速电流 定子电阻 电感 装载电机参数 PID kp PID ki PID kd 电机过热保护模式 电机参数自学习 电机自学习状态 编码器1方向和系统方向 编码器1绝对零位 软件开断使能 强制输出转速设定
AN TR IEB S TE C H N IK
1~2 2~15 0.5~10 0.5~10 6.7 0.7