锤式破碎机三维建模与仿真研究
颚式破碎机的建模与仿真分析毕业答辩

二、颚式破碎机的简介
• 颚式破碎机的发展: • 颚式破碎机的分类:
• 1.简摆颚式破碎机 • 2.复摆颚式破碎机
• 复摆颚式破碎机原理 • 从复摆颚式破碎机机构运动简图 中我们不难发现,它其实是曲柄摇杆 机构的具体运用,曲柄2相当于偏心 轮,连杆3相当于动颚,摇杆4相当于 推力杆。颚式破碎机就是运用曲柄摇 杆机构急回特性增加破碎的时间,减 少非工作时间以达到提高生产率的目 的。
4.1 颚式破碎机的装配 利用Pro/E动态仿 真功能完成破碎机的 装配。
4.1 颚式破碎机的装配图
4.2 破碎机的仿真分析 在完成装配之后,对破碎机进行仿真分析,分 析的结果如下: 由摇杆速度图可得t1=6.5,t2=5 ,根据行程 速度比变化系数K的定义可得: K=t1/t2=6.5/5=1.3,因为K大于1,所以颚式破 碎机具有急回特性。
4.2摇杆的角速度图像
理论计算:
由图中结果分析和理论计算分析表明: 理论计算和软件分析的结果一致,颚式破碎 机中摇杆具有急回特性,即摇杆工作行程运 行慢,这样可以保证破碎质量,空回行程快, 节约加工时间。
六、结论
本论文是Pro/E对复ቤተ መጻሕፍቲ ባይዱ颚式破碎机进行实体建模、装 配、仿真分析。在文中首先简单的介绍了Pro/E三维软件, 其次介绍颚式破碎机的发展与原理,再次详细介绍了破碎 机的实体建模装配过程,最后简单的仿真分析破碎机的装 配结果。整个过程的顺利进行可以看到Pro/E软件在三维 建模方面的优势。
六、谢词
本次是设计中要感谢指导老师谢老 师耐心指导,以及同学们的相互帮助使 得最终完成了本次设计同时经过反复的 修改结果也基本达到了设计的要求,在 设计过程中的许多困难都是在指导老师 的耐心解答下一一得到解决,感谢指导 老师在这次设计中对我的指导,也感谢 同学们的热心帮助。
基于SolidWorks的颚式破碎机的三维设计与建模

收稿日期: 2012 - 03 - 05 作者简介: 王军锋( 1980 - ) ,男,河北巨鹿人,江西理工大学教师、讲师,中南大学机电学院在读博士生,现从事机
2 利用 SolidWorks 对各零件建模
SolidWorks 具有强大的机械零件三维实体的建模功能, 通过最基本的拉伸、旋转、打孔等功能,以及参数化建模, 可以快速、准确、方便地实现机械零件的建模工作,而且 对于已经建立好的零件模型,通过参数化的方法,易于修
图 1 颚式破碎机的结构
改。另外,通过软 件 屏 幕 左 侧 的 特 征 树, 可 以 非 常 直 观、 有效地管理整个机械零件的设计过程,当建模完成的零件 被其他设计人员查看或修改时,能够通过特征树来详细地 了解机械零件的设计意图,以及整个建模和设计过程,从 而可以实现按自己的设计思路进行模型的修改工作,方便 模型之间的共享。
4结语
文章通过对颚式破碎机的定颚、动颚和偏心轴、飞轮、 推力板等零件进行了三维建模,并通过虚拟装配建立了颚 式破碎机的装配体模型,而且利用了干涉检查和运动模拟 功能,有效地检查出了设计中的一些缺陷,易于调整的设 计模型,使设 计 者 的 精 力 可 以 更 加 专 注 于 产 品 的 设 计 上, 大大地提高了设计水平和设计效率,为破碎机类机械产品 的三维化设计提供了有效参考,同时也为机械产品的三维 化设计提供了一个很好的范例。
参考文献:
[1] [2] [3] [4]
郎宝贤,郎世平. 破碎机 [M]. 北京: 冶金工业出版社, 2008. 胡宗武,徐履冰,石来德. 非标准机械设备设计手册 [M]. 北京: 机械工业出版社,2003. 杨国新,王定标. 基于 SolidWorks 的机械零部件虚拟装配体 设计技术 [J]. 煤矿机械,2007,28( 7) : 75 ~ 77. 权 洁. 基 于 SolidWorks 的 空 气 压 缩 机 建 模 及 仿 真 分 析 [J]. 煤矿机械,2011,32( 8) : 56 ~ 58.
液压破碎锤的三维建模及改进设计
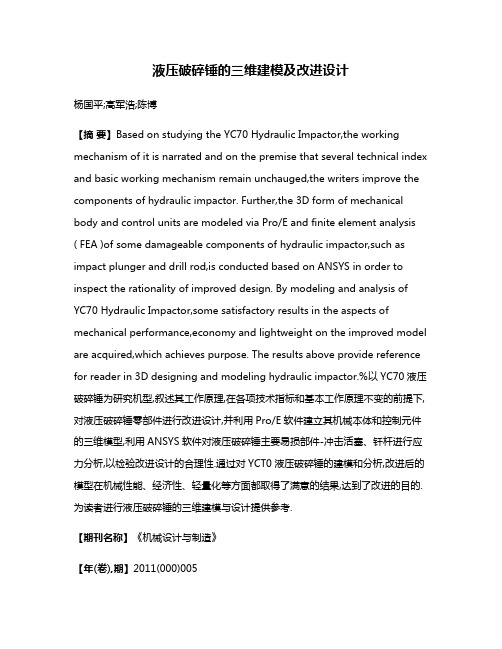
液压破碎锤的三维建模及改进设计杨国平;高军浩;陈博【摘要】Based on studying the YC70 Hydraulic Impactor,the working mechanism of it is narrated and on the premise that several technical index and basic working mechanism remain unchauged,the writers improve the components of hydraulic impactor. Further,the 3D form of mechanical body and control units are modeled via Pro/E and finite element analysis ( FEA )of some damageable components of hydraulic impactor,such as impact plunger and drill rod,is conducted based on ANSYS in order to inspect the rationality of improved design. By modeling and analysis of YC70 Hydraulic Impactor,some satisfactory results in the aspects of mechanical performance,economy and lightweight on the improved model are acquired,which achieves purpose. The results above provide reference for reader in 3D designing and modeling hydraulic impactor.%以YC70液压破碎锤为研究机型,叙述其工作原理,在各项技术指标和基本工作原理不变的前提下,对液压破碎锤零部件进行改进设计,并利用Pro/E软件建立其机械本体和控制元件的三维模型,利用ANSYS软件对液压破碎锤主要易损部件-冲击活塞、钎杆进行应力分析,以检验改进设计的合理性.通过对YCT0液压破碎锤的建模和分析,改进后的模型在机械性能、经济性、轻量化等方面都取得了满意的结果,达到了改进的目的.为读者进行液压破碎锤的三维建模与设计提供参考.【期刊名称】《机械设计与制造》【年(卷),期】2011(000)005【总页数】3页(P41-43)【关键词】液压破碎锤;改进设计;建模;分析【作者】杨国平;高军浩;陈博【作者单位】上海工程技术大学汽车工程学院,上海,201620;上海工程技术大学汽车工程学院,上海,201620;上海工程技术大学汽车工程学院,上海,201620【正文语种】中文【中图分类】TH16.U415.511 概述液压破碎锤是一种由液压能转换为机械冲击能的破碎机具。
锤式破碎机可重用的动态仿真和数字化分析

第39卷第1期河北工业大学学报2010年2月V ol.39No.1JOURNAL OF HEBEI UNIVERSITY OF TECHNOLOGY February2010文章编号:1007-2373(2010)01-0011-06锤式破碎机可重用的动态仿真和数字化分析周征,段国林,岳磊,许红静(河北工业大学机械工程学院,天津300130)摘要针对国内外目前研究现状,在数字化设计的大背景下,以锤式破碎机为研究对象,对其进行数字样机可重用的建模、动态仿真和数字化分析.建立了锤式破碎机的几何模型和动力学仿真模型.提出了基于ANSYS和ADAMS联合仿真分析平台解决问题的新方法,实现了多体动力学软件与有限元软件结合的模式.为了提高精度,在动力学分析中,考虑多刚体动力学和多柔体动力学相结合的方式.利用ANSYS/APDL对锤式破碎机关键零部件进行参数化建模,利用联合仿真分析平台,实现瞬态动力学求解,得到分析结果,指导工程实际.关键词锤式破碎机;参数化设计;动态仿真;数字化分析;可重用中图分类号TH122文献标识码ADynamic Simulation and Digital Analysisof Reusable Hammer CrusherZHOU Zheng,DUAN Guo-lin,YUE Lei,XU Hong-jing(School of Mechanical Engineering,Hebei University of Technology,Tianjin300130,China)12河北工业大学学报第39卷的重要依赖因素.国内外对这方面的研究也仅仅是在假设原则下单个锤头碰撞单个矿物模型的分析,这种分析和实际的破碎过程差别很大.而采用数字样机技术不仅能很好地解决破碎机产品研发中遇到的诸多难题,而且能对各方面因素对其结构的影响提供科学分析[4-5].1建立破碎机的几何模型和动力学仿真模型1.1建立破碎机几何模型Pro /Engineer wildfire 是美国参数科技公司推出的三维建模软件,它具有基于特征、全参数、全相关、单一数据库等特点.产品的整个设计过程可以完全在三维模型上完成,形象直观,它具有单一数据库,任何一处发生参数改动,都反映到整个设计过程的相关环节.单一数据库技术和全相关功能,为并行工程的实施提供一个良好的开发平台.图1所示为建立的PCM400锤式破碎机关键零件的几何模型和总装配图.1.2建立破碎机动力学仿真模型在Pro/E 中把建立的锤式破碎机的几何模型导出为parasolid (*x-t )格式的文件,此文件能被ADAMS 软件读取.在ADAMS 中选择“Import a file ”读入此文件,为建立锤式破碎机动力学仿真模型做准备.在ADAMS 中对导入的装配模型施加约束和驱动具体如下:1)在锤体和锤头部分创建固定约束;2)在键和主轴间创建固定约束;3)在键和锤体间创建固定约束;4)在锤头和壳体之间创建固定约束;5)在主轴一端中心处创建旋转副;6)创建驱动电机,在旋转副上添加旋转速度;7)在锤头和煤块之间创建碰撞副;8)设置煤块的密度为1.80g/cm 3,矿物的尺寸选择为最大通过尺寸1110mm×400mm×618mm ,仿真最恶劣工作环境.1.3实现动态仿真用动力学可视化仿真的方法不用创建机械系统的数学模型和列出描述系统特性的微分方程,应用动力学可视化仿真软件就可进行上述求解,不仅可以对线性系统进行求解也可以对非线性系统进行求解.图3为锤头1上的速度、加速度、角速度、角加速度的运动曲线图.2建立ANSYS&ADAMS 联合仿真分析平台2.1建立可重用有限元模型运用ANSYS&APDL ,实现了参数化建模和自动控制求解,从而降低人工操作的复杂性和困难程度,以便构建数字化的可重用的分析模型.通过改变样机结构参数,从而改变样机结构特征,为实现面向不同需求的产品设计提供参考.而关键参数即为结构在设计过程中需要着重考虑零部件的尺寸,主要是主轴轴径大小以及与其存在尺寸耦合部分的结构尺寸.在建模过程中,为了方便后续ANSYS 分析,需要对模型进行适当的简化,另一方面由于破碎机为对称图1锤式破碎机几何模型Fig.1Geometric model of hammer crusher a )主轴模型b )锤头模型c )锤体模型d )总装配图图2锤式破碎机动力学仿真模型Fig.2Dynamics simulation model of hammer crusher13周征,等:锤式破碎机可重用的动态仿真和数字化分析第1期结构,所以建模时采用对称方式建立模型,并在分析过程中设置对称约束,只对一半的装配模型进行分析,在分析完毕后扩展模型得到整体结构的计算结果,这样不仅可以得到想要的结果,还可以大大节省资源,缩短计算机时.在ANSYS 中建立的破碎机模型如图4所示.划分完网格后的有限元模型如图5所示.2.2建立联合仿真分析平台结构分析利用ANSYS 和ADAMS 构建的联合分析平台来实现.因为锤头破碎物料时受力状况极其复杂,无法通过传统的方法来得到锤头上各个时刻的受力,所以利用ADAMS 仿真来得到锤头受力状况,再加载到ANSYS 中进行有限元分析.随着对机械产品质量的要求不断提高,动力学分析的精度要求也不断提高.所以在动力学分析中,不仅要考虑刚体运动,还要考虑柔性体的运动情况.在机构动力学分析理论上趋向于多刚体动力学与多柔体动力学相结合进行分析.与之相对应,在实现动力学可视化分析上,趋向于应用机械刚体动力学分析软件与有限元分析软件相结合的模式进行分析.在软件应用上,包括CAD软件、多体动力学分析软件ADAMS 、有限元分析软件ANSYS .柔性体将会对整个机械系统的运动产生重要影响,同样整个系统的运动情况也反过来决定了每个构件的受力状况和运动状态,从而决定了构件内部的应力应变分布.因此对运动系统中的柔性体进行应力应变分析则需要用到ANSYS 与ADAMS 两个软件.ANSYS 与ADAMS 联合分析平台如图6所示.破碎机的工作过程是电机通过变速箱将力和运动传递给主轴,而后通过键把运动传递给锤体部分,采用螺栓组件将锤体和锤头刚性连接在一起,这样,就将电机的运动和力传递到执行部件—锤头上,这就是整个图3锤头运动曲线图Fig.3Motion curves of hammer a )锤头1上的速度曲线b )锤头1上的加速度曲线c )锤头1上的角速度曲线d )锤头1上的角加速度曲线图4建立的破碎机模型Fig.4Model of hammer crusher 图5划分网格后破碎机有限元模型Fig.5Finite element model of hammer crusher14河北工业大学学报第39卷工作过程.基于ADAMS 和ANSYS 两个研究平台的分析特征,在此将破碎机主轴,锤体及锤头、键、螺栓组件等作为一个整体来研究,可称之为破碎机主体部分.其主要受如下类型的力.1)摩擦载荷.作用在锤式破碎机主体上的摩擦载荷主要由轴与密封装置之间的摩擦、轴承的滚动产生的滚动摩擦及其它辅助装置的摩擦引起的.2)惯性载荷.当破碎机具有角加速度时所产生的载荷.3)阻尼载荷.阻尼载荷是与外界环境相关的一种载荷,其大小与运动物体的速度成正比,该载荷较小,一般分析时可不计.4)工作载荷.锤式破碎机正常工作时,锤头与煤岩冲击碰撞,将产生的作用力.在碰撞时,虽然锤式破碎机的锤头与煤岩的速度发生有限的变化,但由于碰撞时间极短,加速度很大,将出现巨大的碰撞力,其值远大于前三者,占到90%以上,在分析中只考虑工作载荷即可.2.3创建锤头柔性体1)建立模型,对模型划分网格.2)建立外部节点.外部节点在ANSYS 程序中即指柔性体与刚性体联结位置处的节点,用于在ADAMS 所进行的运动学分析中,连接柔性体与刚性体.当在ANSYS 中建立模型需要运用到ADAMS 仿真中时,在结构体中如何选取外部节点是一个很重要的问题,一般来说,一个关节位置只使用一个节点作为外部节点,如果柔性体的连接部位为空心,则需要在连接处创建节点作为外部节点,外部节点与其周围的柔性体节点一般使用刚性区域来定义.3)统一单位.4)输出ADAMS (*MNF )文件.*MNF 文件是从ansys 中生成adams 软件所使用的柔性体模态中性文件,该文件中包含了柔性体的质量,质心,转动惯量,频率,振型以及对载荷的参与因子等信息.在破碎机中,由于锤头的斜面是碰撞的主要位置,故必须选择斜面上的所有节点进行耦合与外部节点进行连接,以保证有限元分析过程中模拟碰撞力的准确性.另外还要创建一个节点作为锤头与锤体的连接点.图7所示把柔性体部件导入到ADAMS 中,进行仿真.仿真结束后,图8所示导出作用在柔性体上的载荷文件——Lod 文件.把ADAMS 仿真得到的Lod 文件加载到ANSYS 中,并对模型施加相应的约束,进行瞬态动力学分析,如图9所示.2.4有限元分析结果通过以上得出的关键零部件的应力值与许用应力值进行比较,发现其值远远小于各个零件材料的屈服极图6ANSYS 与ADAMS 联合分析平台Fig.6Analysis platform of ANSYS&ADAMS定义单元,材料APDL 建模划分网格施加边界条件施加载荷输出中性文件统一单位定义外部节点导出load 文件导入柔性体创建碰撞创建驱动电机动态仿真创建约束15周征,等:锤式破碎机可重用的动态仿真和数字化分析第1期限,可以满足使用要求.3结论数字样机技术是以CAX/DFX 技术为基础,以机械系统运动学、动力学和控制理论为核心,融合虚拟现实、仿真技术、三维计算机图形技术,为产品的研发提供全新的数字化设计方法.在数字化设计的大背景下,以锤式破碎机为研究对象,对其进行数字样机的建模与分析,具有十分重要的研究意义.本文相关研究内容和结论主要体现在以下几个方面:1)利用Pro/E 三维造型软件对破碎机的关键零部件进行建模及装配,并利用Pro/E 与ADAMS 的软件接口,把装配模型导入到ADAMS 中,建立动力学仿真模型,实现锤式破碎机动态仿真,得到锤头上的运动曲线图.图7柔性体导入ADAMS Fig.7Flexible body into ADAMS 图8导出Lod 文件Fig.8Load file export图9在ANSYS 中读取lod 文件Fig.9Read load file from ANSYS 图10锤式破碎机关键零件应力云图Fig.10Stress cloud chart of key parts of hammer crusher a )整体应力云图b )锤头应力云图c )键应力云图d )螺栓应力云图e )主轴应力云图f )锤体应力云图(下转第19页)19乔志佳,等:镁合金汽车方向盘压铸成型工艺的数值模拟第1期用性能.因此,该方案设计欠佳.4结束语1)在压铸工艺设计过程中充分利用CAD/CAE 技术,可缩短设计周期、提高设计效率,有效减少试验次数并降低设计成本.2)采用方案2所示环形浇注系统,可实现镁合金汽车方向盘压铸件充型平稳、完整,夹杂物缺陷少,产品质量好,是较合理的工艺方案.参考文献:[1]张剑平,艾云龙,左红艳.热处理对浇铸和压铸AZ91D-RE 镁合金组织与性能的影响[J ].金属热处理,2009,34(3):22-26.[2]Wang X J ,Hu X S ,Wu K ,et al .Hot deformation behavior of SiCp/AZ91magnesium matrix composite fabricated by stir casting [J ].MaterialsScience and Engineering A ,2008,492(1-2):481-485.[3]宋珂.镁合金在汽车轻量化中的应用发展[J ].机械研究与应用,2007,20(1):14-16.[4]吴立鸿,关绍康,张春香,等.压铸镁合金在汽车方向盘上的应用研究[J ].铸造技术,2006,27(3):276-277.[5]侯华,毛红奎,张国伟.铸造过程的计算机模拟[M ].北京:国防工业出版社,2008.[6]机械工程手册编辑委员会.机械工程手册[M ].北京:机械工业出版社,1996.6-33.[7]刘正,王中光,王越,等.压铸镁合金在汽车工业中的应用和发展趋势[J ].特种铸造及有色合金,2002(压铸专刊):300-306.[8]模具实用技术丛书编委会.压铸模设计应用实例[M ].北京:机械工业出版社,2006.27-30.[9]田雁晨,田宝善,王文广,等.金属压铸模设计技巧与实例[M ].北京:化学工业出版社,2006.106-107.[责任编辑田丰]2)利用ANSYS/APDL 建立数字化虚拟样机模型,通过改变样机结构参数,从而改变样机结构特征,为实现面向不同需求的产品设计提供参考.数字样机的变化也通过参数大小变化来反映,只要获取相应参数的变化情况利用参数化驱动技术即可形成相应形式的数字样机.3)利用ANSYS 和ADAMS 软件构建的联合分析平台来实现结构分析,实现了多体动力学软件与有限元软件结合的模式,为锤式破碎机的设计提供重要的参考.参考文献:[1]李伯虎,柴旭东,熊光楞.复杂产品虚拟样机工程的研究与初步实践[J ].系统仿真学报,2002(3):336-342.[2]李正峰.确定锤式破碎机锤头碰撞中心位置的研究[J ].矿山机械,2006,34(7):25-28.[3]任小中,陈新建,苏建新.锤式破碎机转子主要技术参数的确定[J ].煤矿机械,2008,29(2):26-28.[4]赵四海,刘力强,骆铁楠.锤式破碎机动态仿真研究[J ].煤炭科学技术,2008,36(11):66-68.[5]Eswaraiah C ,Anshul Gupta R ,Nagarajan ,et al .Minimization of fines generation in size reduction of coals by impact crusher [J ].Fuel ProcessingTechnology ,2008,15(2):704-714.[责任编辑张颖志]图5方案3的流场、温度场和缺陷预测结果Fig.5The forecast results of filling,defect distribution and temperature field for the third casting systema )流场模拟结果(充型50%)b )流场模拟结果(充型结束)c )温度场分布d )缺陷预测结果。
乳化液冲击破碎锤设计及特性仿真

乳化液冲击破碎锤设计及特性仿真张德生【摘要】为解决综采工作面大块煤破碎问题,该文开发了一种采用乳化液作为工作介质的冲击破碎锤,并对其仿真优化.基于低频重载原理设计了蓄能器、控制阀和锤体分置式冲击锤,利用蓄能器、二通插装阀和单向阀等搭建了非连续工作模式液压控制系统,初步确定了冲击破碎锤的主要性能和结构参数.利用AMESim系统仿真软件建立了乳化液冲击破碎锤仿真模型,验证了活塞冲击复位功能,确定了活塞和钎杆的冲击距离,在模型中特别考虑了管路阻力特性.仿真结果表明:蓄能器冲击最大流量达4000 L/min,活塞上腔峰值流量接近7000 L/min,具有超大流量特征,活塞最大冲击速度约10 m/s;采用锥状缓冲结构,可有效降低空打过程活塞与导向套的冲击.乳化液冲击破碎锤为井下大块煤岩破碎提供了一种新的途径.【期刊名称】《液压与气动》【年(卷),期】2013(000)006【总页数】4页(P28-31)【关键词】乳化液破碎锤;液压冲击;超大流量;特性仿真【作者】张德生【作者单位】天地科技股份有限公司开采设计事业部,北京100013;中国矿业大学(北京)机电与信息工程学院,北京100083【正文语种】中文【中图分类】TD451引言大采高综采综放工作面片冒或垮落的大块煤,具有块度大、硬度高和处理难的特点,严重影响煤矿安全高效生产,成为困扰井下生产的一大顽疾。
传统作业依赖人工抡锤或持风镐处理,现有的机械化装置尝试多安放在转载点,由于体积庞大,无法在工作面尤其是综放后部工作面使用,迫切需要一种结构紧凑、效率高的破碎装置[1-2]。
工程机械上广泛应用的液压破碎锤具有体积紧凑、比功率大的特点,可用于大块的破碎作业。
但现有液压破碎锤采用矿物油作为工作介质,其密封件、结构材料和滑阀式控制阀对乳化液适应性差,直接用于井下需要设置专门的动力源;蓄能器、控制阀等和锤体集成于一体,导致重量大,搬运安装不便;同时一体式安装蓄能器体积小,单次冲击提供的冲击能量小。
基于VC++锤式破碎机参数设计软件的开发

锤式 破碎 机最 早 开始 于 19 8 5年 , 经过 多 年 的发 展 ,
架 如 图 1所 示
Байду номын сангаас
,
分 为 6个 主 模 块 : 1系 统 注 册 模
其技 术性 能 已经达 到 了较 高 的程度 , 对于 锤式 破 但 碎机 的设 计来 说 , 目前 大 多仍 然采 用 人 丁计 算 和设 计方 法 ,无法 满 足 目前对 垃圾 处理 设 备 不 断变 化 、
想 , 照破 碎机 的基 本结 构 和原 理 , 按 利用 系列化 、 模
或 类 向导 的形 式 给 出 ,一 些 需要 从 传 统 的手 册 中 查 取 的系 数 和基 本 参 数 ,都 以有 规 律 的组 织 方 式
存 放 在类 或 数 据 库 中 , 计 者 在 调 用 时 , 以直 接 设 可
块; 2转 子 参 数 和锤 头设 计模 块 ; 电机 选 用 和 主 3 轴设计模块 ; 4壳 体 设 计 模 块 ; 5辅 助 功 能 模 块 ; 6 帮助 模块
。
根 据实 际 需要 , 其 中 主要 设计 模 块 2 将
设 领 可 以有效 应 对 目前 由于 对破 碎 机产 品多 计域
…一 。 一 … ~ ~ 一 一 ~一 一 ~ 一 … 、 穿 设 计 过 程 始终 。各 个 设 计 模块 都 将 以对 话 框 类
_
毒
;
样 化需 求 , 大缩 短设 计周 期 和提 高设 计 效率 。本 大 文利用 vsa e + . i l + 60开发 平 台 和 A 2 0 u 。 0 3数 据 库 ,采 用 A O连 接方 式 .遵 照 面 向对 象 编程 的 思 D
关 键 词 : C +; 式 破 碎 机 ;数 据 库 V + 锤
锤式破碎机可重用的动态仿真和数字化分析

Dy a i i u ai n a d Di i l n m c S m l t n g t ay i o a An l ss
o u a l m m e u h r fRe s b eHa rCr s e
Z 0U Z e g UAN G o1 ,YUEL i H h n ,D u 一n i e,XU n -n Ho gj g i
o h mme r s e a eb e o sr ce . A e a p o c f ov n r b e b u i lto n l ssp af r wi f a r u h rh v e n c n t td c u n w p r a ho l i g p o l msa o t mu ai n a a y i lto m t s s h
锤式破碎机 可重用 的动态仿真和数 字化分析
周 征 ,段国林 ,岳 磊 ,许红 静
( 北 工 业 大 学 机 械 工程 学 院 ,天 津 3 0 3 河 0 10)
摘要
针对 国 内外 目前研 究现状 ,在数字化设计的大背景下,以锤 式破碎机 为研 究对 象,对其进行数字样 机可重
用的建模 、动态仿真和数字化分析.建立 了锤 式破碎机 的几何模 型和动力学仿真模型.提 出了基 于 ANS YS 和
第3 9卷 第 1期
、0 _ 9 , l No 1 3 .
河
Hale Waihona Puke 北工业大
学
学
报
21 0 0年 2月
Fbur 0 0 e ray 2 1
J 0URNAL 0F HE BEI UNI RS T OF TE VE I Y CHN0L OGY
液压破碎锤的三维建模及改进设计
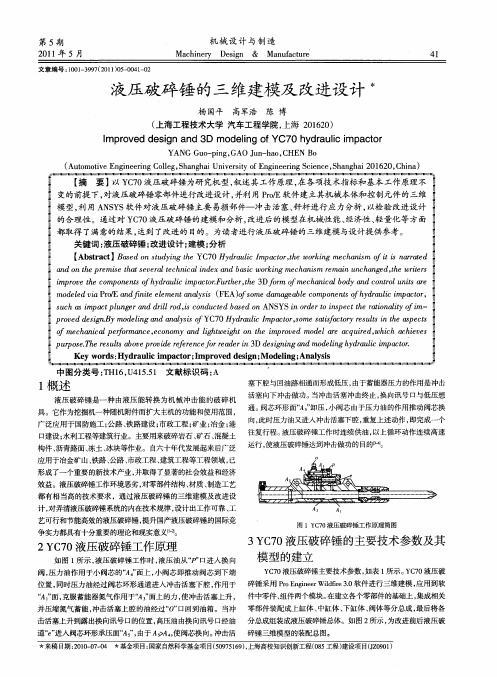
() a改进前 () b 改进后 图 2改进前后液压破碎锤三维装配模型
4 C 0液压破碎锤 的改进设计 7 Y
41Y 7 . C 0液压 破碎锤 结构 改进 方案
通过分析原始模型的结构 , 已发现结构 中不合理的地方 , 需
改进 的零件及改进方案 , 如表 2 所示 。
表 2 零件 的改 进 方案 及 其原 因
Aie e in me h d o c e e a ig a d d c l a ig c n r l f t p d d d sg t o sf ra c l r t n e eer t o to e n n o s
mo or a e n p o e s t s do rt u b Z N i u ,H Gj—a g HA G L- n Z AN itn j ( co l f c aia E gn eig& A tm t a o , ot nvri f hn ,a u n0 0 5 , hn ) S h o o h nc l n ie r Me n uo ai t n N r U i syo iaT i a 3 0 C ia zi h e t C y 1
将由 P0 r 建立的模型保存为 i 格式并导人 A S S g s N Y 有限元 液压破碎锤工作环境恶劣 , 易 在下缸体和下导 向套之间卡死 软件 : 采用三角形网格 , 在钎杆底部添加全约束以限制钎杆各个方 内壁改为上缸套、 中缸 参照液压破碎锤主流设计 , 套、 下缸套的内壁形状 , 简化零件数量 , 降低加工 向的位移, 并在钎杆顶部施加垂直向下的均布载荷 6MP 。材料弹 8 a 体化设计 装配难度 性模量为 2 E a泊松 比为 0 。钎杆原始模型和改进模型的应 . 1P , 1 1 . 3 利于密封 , 也可缓解 钎杆 回弹的冲击 力云图和位移云图, 如图 7 1 所示。 ~2 分析结果汇总, 如表 4 所示。 头部改为大曲率半径 改善应力状况 对称增加一根 改善钎杆 的变形状况 头部呈 十字形螺丝刀状 改善应力状况
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
锤式破碎机三维建模与仿真研究赵四海1,李国平2,骆铁楠1(1.中国矿业大学,北京100083; 2.张家口煤矿机械有限公司,河北张家口075025)摘要:分析了锤式破碎机工作运行情况,提出了锤式破碎机冲击破煤的机理,采用Pro ΠE 软件建立了PC M400型锤式破碎机执行部分零件的三维模型,包括轴、锤体、锤头和附属零件,并进行了PC M400型锤式破碎机执行部分虚拟装配,在此基础上对PC M400型锤式破碎机执行部分的运行状态进行了动态仿真。
关键词:锤式破碎机;三维建模;Pro ΠE ;仿真中图分类号:T D451;TP391 文献标志码:A 文章编号:100320794(2008)0820034203Study of 3D Modeling and Simulation for H ammer CrusherZH AO Si -h ai 1,LI G uo -ping 2,L U O Tie -nan1(1.China University of M ining and T echnology ,Beijing 100083,China ;2.Zhangjiakou C oal M ining Mechinery C o.,Ltd.,Zhangjiakou 075025,China )Abstract :The im pact mine -cutting mechanism of hammer crusher has been presented.The 3D m odel of com 2ponents of the PC M400hammer crusher has been designed ,include the axle ,the hammer body ,the hammer cutter and attached com ponents ,then the virtual assembly of PC M400hammer crusher has been assembled.Based on this ,the dynamic simulation of running condition of PC M400hammer crusher has been done.K ey w ords :hammer crusher ;3D m odeling ;Pro ΠE s oftware ;simulation 概述锤式破碎机主要用于煤矿井下顺槽内,与转载机配套使用,对通过转载机的大块原煤进行破碎。
通过对锤式破碎机的工作载荷进行静力学和动力学分析,研究其破碎机理,建立相应的数学模型,并进行动态仿真,从而找到其优化设计方法。
为锤式破碎机的设计和工作状态分析提供依据,不仅具有重要的理论意义,也有重要的实际应用价值。
目前,随着C AD ΠC AM 技术的发展,三维实体造型、虚拟技术、工况仿真模拟已成为C AD 的重要发展方向,并在产品设计和制造方面引起了重大变革。
对有复杂运动的锤式破碎机等机械产品,建立三维动态图形和三维虚拟环境模拟,可以很好地描述其数学模型的准确性、装配过程的合理性、作业过程的动态性、运动轨迹的正确性。
本文将采用Pro ΠE (WI LDFIRE )软件,对锤式破碎机的三维造型和动态仿真进行研究。
1 建立三维模型建立三维模型是指进行机构构件的具体设计,首先确定零件的形状、结构、尺寸和公差等,并在计算机上进行二维绘图和三维实体造型,然后通过装配模块完成零件组装,形成整机。
在Pro ΠE WI LD 2FIRE 软件中,零件装配是依靠所选择的面及特征来约束零件的。
装配是动态仿真的前提,装配关系的正确与否直接影响动态仿真的效果。
装配前,先确定运动构件及构件间的运动副,最后由各机构构成整机,并为仿真做准备。
以PC M400型锤式破碎机为例研究锤式破碎机的三维建模与仿真,重点研究PC M400型锤式破碎机的执行部分。
PC M400型锤式破碎机执行部分的主要零部件包括:主轴、锤体、锤头。
(1)主轴在PC M400锤式破碎机中,主轴的总体特征由以下特征组成:截面直径不同的圆柱体棒料,键槽、锥面、螺纹孔、圆角、倒角。
由于主轴的总体特征关于主轴的中心横截面对称,所以只需创建出主轴中心横截面一侧的所有特征,再使用“镜像”命令即可创建出主轴的所有特征(见图1)。
图1 主轴特征图(2)锤体锤体是连接主轴和锤头的关键部件,它是把动力从传动部分转移到执行部分的“枢纽”。
在PC M400锤式破碎机中,锤体的总体特征由以下特征组成:锤体主体(除此之外不含其他任何特征)、阶梯孔、中心孔、键槽、螺纹孔、圆角、倒角。
由于锤体的总体特征关于锤体的中心横截面对称,所以只需创建出锤体中心横截面一侧的所有特征,再使用“镜第29卷第8期2008年 8月 煤 矿 机 械C oal Mine Machinery V ol 129N o 18Aug.2008像”命令即可创建出锤体的所有特征(见图2)。
图2 锤体特征图(3)锤头锤头是转载机用锤式破碎机的执行机构,旋转的锤头可对大块原煤进行打击破碎,最终形成一定块度的煤块。
在PC M400破碎机中,锤头的总体特征由以下特征组成:锤头主体(除此之外不含其他任何特征)、堆焊材料、阶梯孔、锤头与锤体的连接部分、倒角、圆角(见图3)。
至此就完成了PC M400型锤式破碎机执行部分主要零部件,根据二维工程图进行三维建模的所有工作。
图3 锤头特征图(4)附属零部件的创建过程PC M400型锤式破碎机执行部分的主要附属零部件包括:紧固螺母、轴承座、轴承盖、迷宫压板。
(5)三维虚拟装配过程虚拟装配就是利用零部件的链接关系建立装配。
ProΠE的装配模式提供了并行的、自下而上的、自上而下的产品开发方法。
在自下而上的设计模式中,先在零件模块中构造各个零件的三维模型或者调用原先做好的三维模型,然后在装配模块中建立零部件之间的链接关系,它是通过配对条件在零部件之间建立约束关系来确定零部件在产品中的位置。
在虚拟装配中,零部件的几何体是被装配引用,而不是复制到装配中,不管如何编辑零部件和在何处编辑零部件,整个装配部件保持关联性,如果修改某些零部件,则引用它的装配件自动更新,反应零部件的最新变化。
进行零件装配时最重要的步骤就是对零部件进行适当的约束。
在ProΠE中建立装配关系是用贴合、平面和基准面对齐、坐标系各个轴相互对齐等约束命令将所有的零部件按要求装配在一起。
ProΠE是基于特征的建模方式创建零件的三维模型的,每创建一个特征都是以一个虚体特征为参考的,这些虚体特征在实体造型及装配方面十分有用,是起辅助作用的。
在虚拟装配时,如果每个零部件都采用实际坐标系进行装配,势必牵涉大量的计算,由于计算的误差,还将导致装配失败,因此,借助ProΠE提供的虚体特征,可以使装配过程大大简化。
机制动态仿真是用计算机模拟机械运动,检查机械运动中各部件的运动关系以及可能存在的问题。
在ProΠE中,可以通过对机构添加运动副、驱动器使其运动起来,以实现机构的运动仿真。
零件组装是通过装配模块完成。
在ProΠE WI LDFIRE软件中,零件装配是依靠所选择的面及特征来约束零件的。
装配是动态仿真的前提,装配关系的正确与否直接影响动态仿真的效果。
装配前,先确定运动构件及构件间的运动副,最后由各机构构成整机,并为仿真做准备。
PC M400型锤式破碎机执行部分的最终装配模型如图4。
图4 PC M400型锤式破碎机执行部分的最终装配模型PC M400型锤式破碎机完整的装配模型如图5。
图5 PC M400型锤式破碎机完整的装配模型2 锤式破碎机动态仿真研究机构的动态仿真分析需要建立机构的动态模型。
在模型图中有连接构件,还有各种运动副。
在装配模块中连接构件装配成整机,并定义相互运动的运动副。
再设计机构的运动链图,将各个组成部件及其运动顺序表达出来。
锤式破碎机的动态仿真属于单驱动器的开环机构仿真,是ProΠE运动仿真中比较复杂的一类,仿真过程中需要创建一个动力源—交流异步电动机,并调节各组成部件的运动顺序,它将直接影响到整个机构的仿真逼真程度。
通过运动过程的模拟,可以直观地了解系统的动态特征,十分便利对各运动构件和运动副进行分析。
它还可以反映机构驱动时,构件在运动中的速度变化情况。
第29卷第8期 锤式破碎机三维建模与仿真研究———赵四海,等 V ol129N o18 基于Matlab的液压张紧装置电液比例控制系统分析与仿真李 广1,杨寅威1,许振杰1,梁 斌1,姚 洪1,王建升2(11中国矿业大学机电工程学院,江苏徐州221008; 2.京唐公司,河北唐山063200)摘要:针对带式输送机张紧装置多点张紧力控制的新要求,以AH D型带式输送机液压全自动张紧装置为例,在压力跟随工况下对其电液比例控制系统进行建模分析,并用Matlab对其模型进行仿真,并验证是否符合新要求。
关键词:Matlab;张紧装置;电液比例;仿真中图分类号:T D528;TP391 文献标志码:A 文章编号:100320794(2008)0820036203 Analysis and Simulation of E lectro-hydraulic Proportional Control System of H ydraulic T ake-up Device on MatlabLI G u ang1,YANG Yin-w ei1,XU Zhen-jie1,LIANG Bin1,YAO H ong1,WANG Jian-sheng2(1.E lectromechanical C ollege of China University of M ining and T echnology,Xuzhou221008,China;2.Jingtang S teel C om pany,T angshan063200,China)Abstract:F or the new requirement of multi-tension in different w orking points about the belt convey or take-up device,take the AH D automatic belt convey or hydraulic take-up device for a case,it establishes a math2 ematical m odel of the new system for pressure follow control condition and gets the dynamic responses of this m odel by Matlab.K ey w ords:Matlab;take-up device;electro-hydraulic proportional;simulation0 引言带式输送机是以输送带作为牵引机构和承载机 使用Mechanism模块进行运动学仿真,包括2个基本步骤:(1)定义一个机构 通过使用连接在装配件中增加元件(与使用放置约束向装配件中增加元件方式相同)来定义机构,并用连接定义元件之间的相对运动。