频率特性的基本概念
精品文档-自动控制原理(第二版)(千博)-第5章
图 5-5 惯性环节的波德图
25
三、对数幅相图(Nichols图)
对数幅相图是以相角(°)为横坐标, 以对数幅频L(ω)(dB)
为纵坐标绘出的G(jω)曲线。频率ω为参变量。因此它与幅相
频率特性一样, 在曲线的适当位置上要标出ω的值, 并且要用
箭头表示ω增加的方向。
用对数幅频Hale Waihona Puke 性及相频特性取得数据来绘制对数幅相
第五章 频 域 分 析 法
第一节 第二节 第三节 第四节 第五节 第六节 第七节 第八节 关系 第九节 德图
频率特性的基本概念 频率特性的表示方法 典型环节的频率特性 系统开环频率特性 奈奎斯特稳定性判据和波德判据 稳定裕度 闭环频率特性 开环频率特性和系统阶跃响应的
利用MATLAB绘制奈奎斯特图和波
8
图 5-2 频率特性与系统描述之间的关系
9
利用频率特性曲线分析研究控制系统性能的方法称为频域 分析法。频域分析法主要有傅氏变换法和经典法。
(1) 傅氏变换法就是系统在输入信号r(t)的作用下,其输 出响应为
即把时间函数变换到频域进行计算并以此分析研究系统的方法。 (2) 经典法就是先求出系统的开环频率特性G(jω)并绘成
的对数频率
22
(1) 对数幅频特性曲线。通常用L(ω)简记对数幅频特性, 故
ω从0变化到∞时的对数幅频特性曲线如图5-3所示。
23
(2) 相频特性曲线。通常以j(ω)表示相频特性, 即 j (ω)=∠G(jω)。对于惯性环节, 有
j (ω)=-arctanTω 对不同ω值, 逐点求出相角值并绘成曲线即为相频特性曲线, 如图5-5所示。
45
图 5-11 振荡环节近似波德图
自动控制原理与系统控制系统的频率特性
如图4-6所示。
12
四、惯性环节 传递函数 : G(s) C(s) 1
R(s) Ts 1
频率特性 : G( j) C( j) 1
R( j) jT 1
对数频率特性 : L() 20lg
1
20lg
(T)2 1
(T)2 1
Bode图 : arctanT
▪对数幅频特性L(ω)是一条曲线,逐点描绘很烦琐,通常采用近似的 绘制方法,用两条渐进线近似表示.
(极坐标表示法)
U () jV ()
(直角坐标表示法)
(A指(数表)e示j法 ())
图4-2
A() G(j) U 2 () V 2 ()
() G( j) arctan 1 V () U ()
6
例4-1 写出惯性环节的幅频特性、相频特性和频率特性。
解:惯性环节的传递函数为
G(s) 1 Ts 1
2
• 系统(或环节)输出量与输入量幅值之比为幅值频率特性, 简称幅频特性,它随角频率ω变化,常用M(ω)表示。
A()
A c
A r
• 输出量与输入量的相位差为相位频率特性,简称相频特性,它 也随角频率ω变化,常用φ(ω)表示,
c r
幅频特性和相频特性统称为频率特性,用G( jω)表示
3
频率特性就是线性系统(或环节)在正弦输入信号 作用下稳态时输出相量与输入相量之比。
G (j) G(j) G(j)
A() G(j)
() G(j)
幅频特性是输出量与输入量幅值之比M(ω),描述系统 对不同频率正弦输入信号在稳态时的放大(或衰减) 特性。
相频特性是输出稳态相对于正弦输入信号的相位差 φ(ω),描述系统稳态输出时对不同频率正弦输入信号 在相位上产生的相角迟后(或超前)的特性。
频率特性的基本概念

T = 0 T = 0.3 T = 0.8
() = 0° () = 16.7 ° () = 38.7 °
T = 1 T
Friday, May 15, 2020
() = 45°
() = 90°
37
37
5 一阶微分环节
Im =
频率特性 G(j) = 1 + jT
(1)极坐标图
0
=0 Re
幅频特性为 A() 1 2T 2
以横坐标(称为频率轴)上每一线性单位表示频率的十倍变化, 称为十倍频程(或十倍频),用Dec表示。如下图所示:
Friday, May 15, 2020
16
Dec Dec Dec Dec
... 2 1 0 1 2
0 0.01 0.1 1 10 100
log
由于 以对数分度,所以零频率线在 处。
特性表示在同一个复数平面上。
12
Friday, May 15, 2020
12
在一阶RC滤波电路中,系统是一个典型的 一阶惯性环节,其频率特性为:
G( j)
1
jT 1
在输入不同频率的正弦信号下,计算出幅值、相 位并列表如下:
根据该表格 可以绘制出 一阶惯性环 节的奈奎斯
特图。
Im
ω ∞0
-45
ω=0 Re
(渐进线)近似表示。 对实验所得的频率特性用对数坐标表示,并用分
段直线近似的方法,可以很容易的写出它的频率 特性表达式。
Friday, May 15, 2020
26
二、典型环节的频率特性
1 .比例环节
其传递函数为 G(s) = K
频率特性为 G(j ) = K
(1)幅相频率特性
课件:第三章-1-频率特性基本概念及波特图
2. 一阶零点因子
Av2( j)
Av2 ( ) 20 lg 1 ( / z )2
2
(
)
arct
an
z
结的论贡:献| A是网v( j负络)的函| (d,数B)最的大每20为一lg 个-Av(一900) 度阶 2,极0lg在点1ω因=子 ω(zp负2处半为20轴-lg)415对度相,p位2
ω贡=献ω是p-就(2是0) d幅B0频/十 波a倍rc特频ta图n或的-z 转6da折rBc频/t倍an率频,p程在。ω>ωp 处对幅度的
(1 j )
Av (
j )
Av (0) (1
j
z
)
p
其中Av (0)
Avm
z p
(1 j )
Av (
j )
Av (0)
(1
j
z
)
表示成分贝形式:
p
其中Av (0)
Avm
z p
| Av ( j) | (dB) 20lg Av(0) 20lg
2
1
z
20lg
2
1
p
() 0 arctan arctan
零点:z1=0 z2=-σ2
极点:p1=-σ1
零极图为:
p2 ( n ) jn 1 2
p3 ( n ) jn 1 2
3.2.4 波特图绘制方法
波特图:用折线逼近幅度频率特性和相位频率特性, 频率轴采用对数刻度,幅值(以dB表示)和相位采用 线性刻度。
H( j) | H( j) | e j()
零点因子的波特图: H(1 j) j 1() 90 | H(1 j) | 或 | H(1 j) | 20lg(dB)
第五章 频域响应法
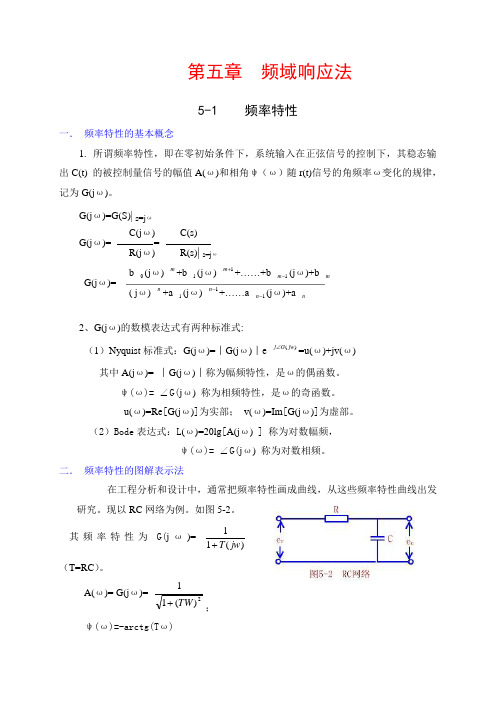
第五章 频域响应法5-1 频率特性一. 频率特性的基本概念1. 所谓频率特性,即在零初始条件下,系统输入在正弦信号的控制下,其稳态输出C(t) 的被控制量信号的幅值A(ω)和相角ψ(ω)随r(t)信号的角频率ω变化的规律,记为G(j ω)。
G(j ω)=G(S)| s=j ω C(j ω) C(s)G(j ω)== R(j ω) R(s)| s=j ωb 0(j ω) m +b 1(j ω) 1+m +……+b 1-m (j ω)+b m G(j ω)=( j ω) n +a 1(j ω) 1-n +……a 1-n (j ω)+a n2、G(j ω)的数模表达式有两种标准式: (1)Nyquist 标准式:G(j ω)=︱G(j ω)︱e)(jw G j ∠=u(ω)+jv(ω)其中A(j ω)= ︱G(j ω)︱称为幅频特性,是ω的偶函数。
ψ(ω)= ∠G(j ω) 称为相频特性,是ω的奇函数。
u(ω)=Re [G(j ω)]为实部; v(ω)=Im [G(j ω)]为虚部。
(2)Bode 表达式:L (ω)=20lg [A(j ω) ] 称为对数幅频,ψ(ω)= ∠G(j ω) 称为对数相频。
二. 频率特性的图解表示法在工程分析和设计中,通常把频率特性画成曲线,从这些频率特性曲线出发研究。
现以RC 网络为例。
如图5-2。
其频率特性为G(j ω)=)(11jw T +(T=RC )。
A(ω)= G(j ω)=2)(11TW +;ψ(ω)=-arctg(T ω)1.极坐标图----Nyquist图当ω=0→∞变化时,A(ω)和φ(ω)随ω而变,以A(ω)作幅值,φ(ω)作相角的端点在s平面上形成的轨迹,称Nyquist曲线(幅相频率特性曲线)简称幅相曲线即Nyquist图,是频率响应法中常用的一种曲线。
2、对数坐标图----Bode图对数频率特性曲线又称Bode曲线,包括对数幅频和对数相频两条曲线。
自动控制理论_哈尔滨工业大学_5 第5章线性系统的频率分析_(5.1.1) 5.1频率特性的概念

如果线性定常系统的输入r(t)和输出c(t)存在傅里叶变换, 频率特性也是输入信号的傅氏变换和输出信号的傅氏变换之比。
G(
j
)
C( R(
j) j)
其中 R( j) r(t)e jtdt C( j) c(t)e jtdt
经过傅氏反变换
c(t)
U1m
1
1 j
sin(t
1
1
j
)
上式表明: 对于正弦输入,其输入的稳态响应仍然是一个同 频率正弦信号。但幅值降低,相角滞后。
输入输出为正弦函数时,可以表示成复数形式,设输入为 Xej0,输出为Yejφ,则输出输入之复数比为:
Ye j Xe j0
Y X
e j
A()e j ()
后于输入的角
度为:
φ=
B A
360o
②该角度与ω有
关系 ,为φ(ω)
③该角度与初始
角度无关 。
二、频率特性的定义
例:如图所示电气网络的传递函数为
U2 (s) 1 Cs 1 1
U1(s) R 1 Cs RCs 1 s 1
若输入为正弦信号: u1 U1m sin t
其拉氏变换为:
1
2
G( j)R( j)e jtd
系统的单位脉冲响应为:
g (t )
1
2
G( j)e jt d
本节小结
1. 控制系统频率特性的基本概念。 2. 频率特性与传递函数的关系。
频率特性有明确的物理意义,可以方便地用实验方法测定, 并用于系统的分析和建模。
频率特性主要适用于线性定常系统。
频率特性的基本概念

•表1-1 RC网络的幅频特性和相频0.707 0.45 0.196 0
() 0
45 63.4 78.69 90
图1-2 RC网络的幅频和相频特性 图1-3 RC网络频率特性的幅相曲线
对数频率特性图又称伯德图(Bode图),包括对数幅频特性 和对数相频特性两条曲线,其中,幅频特性曲线可以表示 一个线性系统或环节对不同频率正弦输入信号的稳态增益; 而相频特性曲线则可以表示一个线性系统或环节对不同频 率正弦输入信号的相位差。对数频率特性图通常绘制在半 对数坐标纸上,也称单对数坐标纸。
(3)利用对数运算可以将幅值的乘除运算化为加减运算, 并可以用简便的方法绘制近似的对数频率幅相特性,从而 大大简化系统频率特性的绘制过程。
自动控制原理
来求取。 (3)通过实验所测数据,进行分析求取。
G( j) G(s) s j
1.2频率特性的图形表示方法
频率特性函数最常用的两种图形表示 方法,分别为极坐标图和对数频率特 性图。
极坐标图,又称奈奎斯特图、幅相频 率特性图,其特点是将频率 作为参 变量。
当正弦信号的频率 由0 变化时, 系统频率特性向量的幅值和相位也随 之作相应的变化,其端点在复平面上 移动而形成的轨迹曲线称为幅相曲线, 其中曲线上的箭头表示频率增大的方 向。
自动控制原理
频率特性的基本概念
1.1频率特性的定义 频率特性反映了系统的频率响应与正弦
输入信号之间的关系。
图1-1 RC网络
控制系统频率特性的求解方法具有如下三种途径: (1)根据已知的系统方程,输入正弦函数求出其稳态解, 而后求解输出稳态分量和输入正弦信号的复数比。 (2)根椐系统传递函数,利用表达式
对数幅频特性图是表示环节的对数幅值 L() 20lg A()和频率 的关系曲线。
自动控制原理第5章_线性控制系统的频率特性分析法

5. 2控制系统开环传递函数的对数频率特性
5.2.2 系统伯德图的绘制
开环对数幅频渐近特性曲线的绘制步骤: (1)把系统开环传递函数化为标准形式,即化为典型环节的传递函
数乘积,分析它的组成环节; (2)确定一阶环节、二阶环节的转折频率,由小到大将各转折频率
标注在半对数坐标图的频率轴上; (3)绘制低频段渐近特性线; (4)以低频段为起始段,从它开始每到一个转折频率,折线发生转
开环极点的个数。
5. 4 频域稳定判据与系统稳定性
5.4.4 控制系统的相对稳定性
开环频率特性 G( j)H( j)在剪切频率 c处所对应的相角与 180 之差称为相角裕度,记为 ,按下式计算
(c ) (180 ) 180 (c )
开环频率特性 G( j)H的( 相j)角等于 时所1对80应的角频率称为相
闭环系统稳定的充要条件是,当 由 0 时0,开 环奈奎斯 特曲线逆时针方向包围( )点 周1, j。0 是具P有2 正实部P 的开 环极点的个数。 需注意,若开环传递函数含有 v 个积分环节,所谓 由 0 0 ,指的 是由 0 0 0 ,此时奈 奎斯特曲线需顺时针增补 v 角度的无穷大半径的圆弧。
5. 4 频域稳定判据与系统稳定性
5.4.1 奈奎斯特稳定判据
若闭环系统在[ s]右半平面上有 个P开环极点,当 从 变化到
时,奈奎斯特曲线 G( j对)H点( j) 的包围1周, j数0 为 ( 为逆时N针,
为顺N 时 0针),则系统N<在0[ ]右半平面上的闭环极点s的个数为 。
折,斜率变化规律取决于该转折频率对应的典型环节的种类; (5)如有必要,可对上述折线渐近线加以修正,一般在转折频率处
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4、本章主要研究内容
5.1 频率特性的基本概念 5.2 幅相频率特性及其绘制 5.3 对数频率特性及其绘制 5.4 奈奎斯特稳定判据 5.5 控制系统的相对稳定性
5.1
频率特性的基本概念
考察一个系统的好坏,通常用阶跃输入下系统的阶跃响应 来分析系统的动态性能和稳态性能。
有时也用正弦波输入时系统的响应来分析,但这种响应并 不是单看某一个频率正弦波输入时的瞬态响应,而是考察频率 由低到高无数个正弦波输入下所对应的每个输出的稳态响应。 因此,这种响应也叫频率响应。
kc1
Rm 2j
A()e j (),kc2
Rm 2j
A()e j ()
cs (t)
kc1e jt
kc2e jt
A( ) Rm
e e j (t ( ))
j (t ( ))
2j
A()Rm sin(t ()) Cm sin(t ())
是频率的函数。
频率响应: 线性系统对正弦输入信号的稳态响应。
一个稳定的线性定常系统,在正弦信号的作用下,稳 态时输出仍是一个与输入同频率的正弦信号,且稳态输出 的幅值与相位是输入正弦信号频率的函数。
Rm sin t
A()Rm sin(t ())
线性定常系统 G(s)
r(t) Css(t)
的传递函数为G(s)。
G(s) C(s)
N (s)
R(s) (s p1)(s p2 )...(s pn )
式中, p j , j 1, 2,..., n 为极点。
若:r(t)
Rm
sin t, 则R(s)
Rm s2 2
(s
Rm j)(s
j)
则: C(s)
式中:Rm 、Cm分别为输入输出信号的幅值。
上述分析表明,对于稳定的线性定常系统,加入一个正弦信号,它的稳态响应是
一个与输入同频率的正弦信号,稳态响应与输入不同之处仅在于幅值和相位。其
幅值放大了 A() | G( j) |倍,相位移动了() G( j) 。 A()和 () 都
j)
kc2
C(s)(s
j)
|s j
G(s)
Rm(s j) (s j)(s j)
s j
RmG( j)
2j
而 G( j) G(s) |s j | G( j) | e jG( j) A()e j()
G( j) G(s) |s j | G( j) | e jG( j) A()e j()
第五章
频率特性法
1、问题的提出
对于一阶、二阶系统,控制系统的时域分析法可以 快速、直接地求出输出的时域表达式、绘制出响应曲 线,从而利用时域指标直接评价系统的性能。因此, 时域法具有直观、准确的优点。
然而,工程实际中有大量的高阶系统,要通过时 域法求解高阶系统在外输入信号作用下的输出表达式 是相当困难的。此外,在需要改善系统性能时,采用 时域法难于确定该如何调整系统的结构或参数。
N (s)R(s)
N (s)
Rm
(s p1)(s p2 )...(s pn ) (s p1)(s p2 )...(s pn ) (s j)(s j)
k1 k2 ... kn kc1 kc2
s p1 s p2
s pn s j s j
2、频率特性的复数表示方法
系统的频率特性为正弦输入信号作用下稳态输出与输入的复数 比,表示为:
G( j) A()e j()
A() G( j) : 输出信号的幅值与输入信号的幅值之比,称为幅频特性; () G( j) : 输出信号的相位与输入信号的相位之差,称为相频特性;
C(s) k1 k2 ... kn kc1 kc2
s p1 s p2
s pn s j s j
拉氏反变换为:
c(t) k1e p1t k2e p2t ... kne pnt kc1e jt kc2e jt
若系统稳定,则极点都在s左半平面。当 t ,即稳态时:
e p1t 0,e p2t 0,,e pnt 0
cs (t ) kc1e jt kc2e jt 式中,kc1, kc2 分别为:
kc1
C(s)(s
j) |s j
G(s)
Rm(s j) (s j)(s j)
s j
RmG( 2j
2、问题的解决
在工程实践中, 往往并不需要准确地计算系统 响应的全部过程,而是希望避开繁复的计算,简单、 直观地分析出系统结构、参数对系统性能的影响。 因此,主要采用两种简便的工程分析方法来分析系 统性能,这就是根轨迹法与频率特性法,本章将详 细介绍控制系统的频率特性法。
控制系统的频率特性分析法是利用系统的频率特性(元件或 系统对不同频率正弦输入信号的响应特性)来分析系统性能的方 法,研究的问题仍然是控制系统的稳定性、快速性及准确性等, 是工程实践中广泛采用的分析方法,也是经典控制理论的核心内 容。
频率响应尽管不如阶跃响应那样直观,但同样间接地表示 了系统的特性。频率响应法是分析和设计系统的一个既方便又 有效的工具。
Tuesday, December 10,
6
2019
5.1.1 频率响应的定义
系统的频率特性定义为间的依赖关系。
对于一般的线性定常系统,系统的输入和输出分别为r(t)和c(t),系统
t
线性系统及频率响应示意图
频率响应的特点
(1)频率响应是和输入正弦信号同频率的正弦量;
(2)频率响应的振幅与输入信号振幅的关系是A(ω); (3)频率响应与输入信号的相位差是φ(ω)。
5.1.2 频率特性
1、频率特性的定义
线性定常系统(或元件)在零初始条件下,当输 入信号的频率ω在0→∞的范围内连续变化时,系统 稳态输出与输入信号的幅值比A(ω)与相位差φ(ω)随 输入频率变化而呈现的变化规律为系统的频率特性。