结构力学_杨海霞_位移法和力矩分配法汇总
结构力学教案位移法和力矩分配法
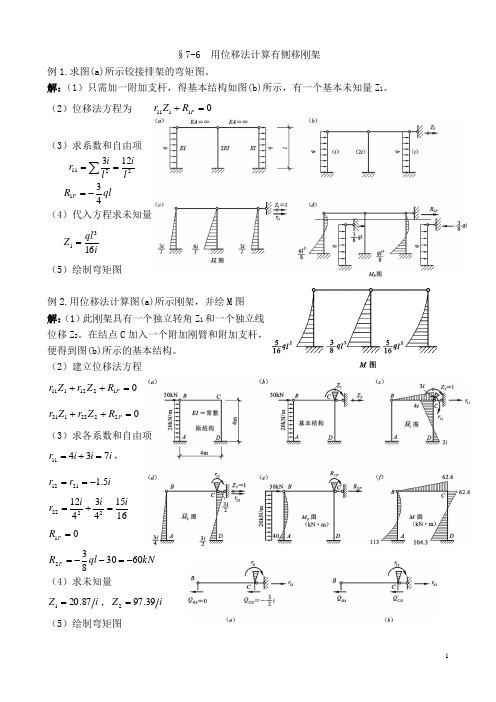
§7-6 用位移法计算有侧移刚架例1.求图(a)所示铰接排架的弯矩图。
解:(1)只需加一附加支杆,得基本结构如图(b)所示,有一个基本未知量Z 1。
(2)位移法方程为 01111=+P R Z r(3)求系数和自由项2211123l il i r ==∑ql R P 431-=(4)代入方程求未知量iql Z 1631=(5)绘制弯矩图例2.用位移法计算图(a)所示刚架,并绘M 图 解:(1)此刚架具有一个独立转角Z 1和一个独立线位移Z 2。
在结点C 加入一个附加刚臂和附加支杆,便得到图(b)所示的基本结构。
(2)建立位移法方程01212111=++P R Z r Z r 02222121=++P R Z r Z r (3)求各系数和自由项i i i r 73411=+=, i r r 5.12112-==1615434122222ii i r =+=01=P RkN ql RP 6030832-=--=(4)求未知量i Z 87.201=,i Z 39.972= (5)绘制弯矩图例3.用直接平衡法求刚架的弯矩图。
解:(1)图示刚架有刚结点C 的转角Z 1和结点C 、D 的水平线位移Z 2两个基本未知量。
设Z 1顺时针方向转动,Z 2向右移动。
(2)求各杆杆端弯矩的表达式3421+-=Z Z M CA 3221--=Z Z M AC 13Z M CD = 25.0Z M BD -= (3)建立位移法方程有侧移刚架的位移法方程,有下述两种:Ⅰ.与结点转角Z 1对应的基本方程为结点C 的力矩平衡方程。
∑=0CM , 037021=+-⇒=+Z Z M M CD CAⅡ.与结点线位移Z 2对应的基本方程为横梁CD 的截面平衡方程。
∑=0xF, 0=+D C CA Q Q取立柱CA 为隔离体(图(d)),∑=0A M , 331216262121-+-=---=Z Z ql Z Z Q CA 同样,取立柱DB 为隔离体((e)),∑=0B M , 2212165.0Z Z Q DB =--= 代入截面平衡方程得 03125012133121221=-+-⇒=+-+-Z Z Z Z Z(4)联立方程求未知量 Z 1=0.91 Z 2=9.37(5)求杆端弯矩绘制弯矩图将Z 1、Z 2的值回代杆端弯矩表达式求杆端弯矩作弯矩图。
结构力学(I)力矩分配法
M1B M1FB
M1C M1FC
S1 B ( R ) M1FB 1B ( R1P ) S 1P
1
1
S1C ( R ) M 1FC 1C ( R1P ) S 1P
1
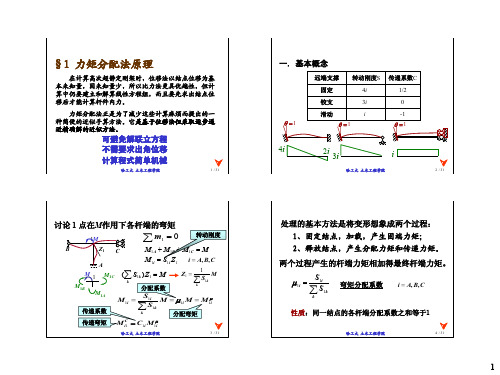
力矩分配法采用了与位移法相同的基本结 构,即固定刚结点,在固定状态下刚臂上产生 约束力矩,为恢复到原状态,将刚臂放松(加 反方向约束力矩),求出放松状态产生的杆端 力矩,将固定状态与放松状态的杆端力矩叠加 即得结构的实际杆端力矩.
一. 基本概念
远端支撑 固定 铰支 滑动 转动刚度S 4i 3i i 传递系数C 1/2 0 -1
1
1
1
可避免解联立方程 不需要求出角位移 计算程式简单机械
哈工大 土木工程学院
4i
1 / 31
2i
3i
哈工大 土木工程学院
i
2 / 31
讨论 1 点在M作用下各杆端的弯矩 1M m1 0
列表法
练习:用力矩分配法求图示结构弯矩图
B
EI
A
EI
C
40 kN
10m
10m
q 10 kN/m
M F 100
分 配 传 递
0.571 0.429 100 0 57.1 42.9 42.9 42 .9
0 0
A
4m
EI
BБайду номын сангаас
4m
EI
C
6m
28.6
M 128.6
128 .6
0
42.9
M
哈工大 土木工程学院
ql 2 /12
A
F F M BC M CB 0
结构力学6位移法和力矩分配法
△
4、5、6 三个固定端都是不动的点,结点 1
2△
3△
1、2、3均无竖向位移。又因两根横梁其
长度不变,故三个结点均有相同的水平位 移△ 。Biblioteka FP456
(a)
事将实结上构,的图刚(a结)所点示(包结括构固的定独支立座线)都位变移成数
铰目结,点与(图成(为b)铰所结示体铰系结)体,则系使的其线成位为移几数何目不 变是添相加同的的最。少因链此杆,数实,用即上为为原了结能构简的捷独地立确
线定位出移结数构目的(独见立图线b)位。移数目,可以
7
(b)
返回
ZZ1 1
Z 1Z 1
FF11
CC
DD
CC
DD
FF22
BB
BB ZZ2 2
EE Z2Z2
EE
AA
FF
AA
FF
结构有四个刚结点——四个结点角位移。
需增加两根链杆, 2个独立的线位移。
位移法的基本未知量的数目为6个。
需注意:对于曲杆及需考虑轴向变形的杆件, 变形后两端之间的距离不能看作是不变的。
D l
l
1
FC
B
B
F
C
B B
l/ 2 l/2
A
l/ 2 l/ 2
三次超静定图示刚架
力 法:三个未知约束力。 位移法:一个未知位移(θB)。
l
力法与位移法必须满足的条件:
1.力的平衡; 2. 位移的协调; 3. 力与位移的物理关系。
位移法的基本假定:
(1)对于受弯杆件,只考虑弯曲变形,忽略轴向变形和剪切变形的影响。
例如 ( 见图a) 基本未知量三个。
2
3
5
工程力学-结构力学课件-8力矩分配法
40kN .m
求不平衡力矩
40kN.m
A EI
6m
C B EI
4m
MBu
20kN / m
40kN .m
60
60
M
u B
60
40
100kN .m
A
60 B
C
40
8 /17 9 /17
M F 60
60
分 配
23.5
传
递
47 53
M 83.5 13 53
§8-2多结点的力矩分配A q 12kN / m
对于同层柱等高,剪力分配系数可简化为按各柱的线刚度进行
分配,即
i
ii ii
顶层:
1
i1 ii
1 3
2
3
底层:
5
i5
2
0.4
ii 1.5 2 1.5
4
i4 ii
1.5 1.5 2 1.5
0.3
6
(2)计算各柱剪力
第8章 渐近法及其他算法简介
§8-1 力矩分配法的基本概念
力法、位移法:精确,求解方程。 力矩分配法是基于位移法,逐步逼近精确解 的近似方法。 单独使用时只能用于无侧移(无线位移)的 结构。
1.名词解释
B
q 1
C
M1B 3i ql2 / 8
M1A 4i ql 2 / 4
M1C i
1.8 3.5 2.6
… … ...
M1FA ql 2 / 8 150
M1F2 ql 2 / 12 100
S21 4i
S2B 3i
结构力学第八章位移法

二、等截面直杆的刚度方程
D
EI 1. 两端固定梁 i l
MAB 4iA M BA 2i A
由上图可得: i
A
M AB 4i A 2i B
M BA
B( ) 3.杆件两端相对侧移 杆件两端相对侧移
C ( )
A A
EI
B
A
B 可写成:
6i l 6i 2i A 4i B l
F M BA 0 F M BC
B
EI
C
上图示连续梁,取结点B的转角θB作为基本未 知量,这保证了AB杆与BC杆在B截面的位移协 这保 与 在 截 位移协 调。
2
2)令 )令B结点产生转角 结点产生转角 B ( ) 。此时 。此时AB、BC杆 杆 类似于B端为固端且产生转角 B 时的单跨梁。
l
MAB
B
MBA
MAB 2iB M BA 4i B
杆件两端相对侧移△,其与弦转角β 的正负 号一致。而β以顺时针方向为正,逆时针方向 为负。 为负 l B A A B
l
13
A
i
MAB
B
B
A
A
EI
B
l
B
A
i
MBA
M AB 4i 2i 6i A l B M 2i 4i 6i BA l
F M AB
A
i EI l
A
B
A
i EI l
A
B
1.结点转角未知量θ 结构有几个刚结点就有几个结点转角未知量。 A B C D
MBA 4iA
MBA 2iA
结构力学——力矩分配法分解课件

THANK YOU
复杂结构的力矩分配法分析
总结词
需要对复杂结构进行精细的力矩分配
详细描述
对于复杂结构,如桥梁、高层建筑等,力矩分配法需要更加精细的分析。这需要对结构的各种参数进 行详细的计算和调整,包括转动刚度、分配系数、传递系数等。通过合理的简化模型和精细的计算, 可以获得结构的整体性能和局部细节,满足工程设计的需要。
应用范围
适用于具有刚性转动 部分的连续梁和框架
适用于具有弹性支撑 的连续梁和框架
适用于具有弹性转动 部分的连续梁和框架
适用条件
结构体系为连续梁或框架 结构具有刚性转动部分,且转动部分在分配力矩后不会出现弹性变形
结构具有弹性支撑,且弹性支撑在分配力矩后不会出现弹性变形
计算复杂度与精度要求
力矩分配法的计算复杂度取决于梁和框 架的自由度数量,自由度越多,计算越
。
误差传递
由于传递系数和分配系数的近似 计算,可能会引入一定的误差,
影响分析结果的准确性。
计算复杂度
对于大型复杂结构,力矩分配法 的计算量可能会变得很大,需要
借助计算机辅助分析。
改进与发展方向
01
02
03
04
数值优化
通过改进算法和优化计算方法 ,提高力矩分配法的计算效率
和精度。
考虑非线性因素
将非线性因素纳入力矩分配法 中,以适应更广泛的结构类型
在力矩分配法中,将结构中的结点分为两类:基本结点和附属结点。基本结点是承 受力矩的结点,附属结点则是传递力矩的结点。
力矩分配法的原理是将所有结点的力矩自由度进行分配,通过调整传递系数来使各 结点的力矩平衡,从而求解出各个结点的位移。
刚度系数与传递系数
刚度系数是指单位力矩作用下结 点的位移,它反映了结点的刚度
结构力学 课件 力矩分配法
SAB
1
2 传递系数C
传递系数: 一单跨超静定梁的一端(A端)单位转角时,发生于远 端(B端)的弯矩与近端(A端)的弯矩之比。
如: 当远端(B端)固定,C AB
M
BA
SAB
1 2 S AB
MBA
A B
图(a)
1
C 当远端(B端)铰支 , AB
M
SAB
A
B
BA
0
SAB
A
1
图(b)
S AB
(1)设想在结点B增加一个附加刚臂,得到位 移法基本结构。阻止其转动如图(g)所示。 查表容易得到各单跨超静定梁的杆 端弯矩。则附加刚臂的约束力矩由 结点B的平衡条件得
M
B
Fp
A
q
B C
图(f)
MB
A
Fp
B
q
C
图(g)
M
F BA
M
F BC
MB MBAF -MB
A B C
附加刚臂的约束力矩MB 是原结构 上所没有的,它反映了基本结构汇 交于B结点的各杆B端弯矩所不能平 衡的差额。我们称之为B结点的不 平衡力矩。
MBCF
图(h)
(2)原结构在结点B本来没有转动约束,即不存在不平衡力矩MB ,因 此,为了与实际情况相符,必须消除人为引入的附加刚臂,即使MB 0,这就相当于在 MB的基础上再施加上一个(- MB )如图(h)所示。
此时梁将产生新的杆端弯矩M´BA 、 M´BC (分配弯矩),在远端将产生新 的杆端弯矩M´AB 、 M´CB 、(传递弯 矩)。 (3)原结构在荷载的作用下的实际杆端弯 矩应为图(g) 和图(h)两种情况的叠加。 下面举例说明力矩分配法的解题过 程。
结构力学-力矩分配法
5.8 5097.1 -62.342-.3109.3
1,3
16 15.2 1537.6 20.9
2
-5.2 -10.3-18.2
0.762 0.238 33.3 -288
129141.1.7 60.6 -51.4
41.7 13
-9.1 288
1解,3 :
2
1,3
1) 求分配2.系7 2数.5: 2)M求1 固 7端8弯.1-矩100:.92
SBA=4×3i=12i SBC=3×4i=12i
AA -15
BB
CC
-30
M-图30(kN.m)
μBA=12i/24i=1/2 μBC=12i/24i=1/2
3)叠加1)、2)得到最后杆端弯矩。 计算过程可列表进行
返回
例题 2
单结点力矩分配法
用力矩分配法计算,画M图。
解:1)求μ
μAB= 4/9 μAC= 2/9
AA1155kkNN↓↓↓↓44↓↓i00↓↓=kk↓↓1NN↓↓↓↓//mm↓↓↓↓ DD
MA 10
80
mAB
M=15 i=2
mAD mAC CC
MM图图((kkNN..mm))
22mm
22mm
44mm
A
C
D
AD
AC
CA
DA
3/9
2/9
- 80
15
10
-10 返回
- 65
10
- 10
三、多结点力矩分配法
3iij
由此可见,在同一结点上各杆杆端转角相等的前提下,两杆i端的
DM ' ik
DM ik
1 2
DM
6第六章 位移法和力矩分配法PPT课件
FF QBA
15
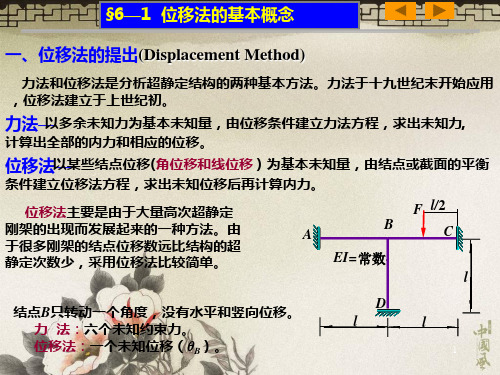
第2节 位移法的基本原理
力法:是以结构的多余约束力作为未知量,
按照位移条件将多余约束力求出,然后再根 据平衡条件求解其他的约束力、内力 以及求 位移等等。
力法是将超静定结构化为静定结构来计算的。
位移法:是以结构的某些位移作为未知量, 利用变形协调条件,通过对超静定梁系的计 算建立平衡条件,求出结点位移,再根据内 力与位移之间的关系,确定结构的内力。
11F/16 -5F/16
B -ql2/8 0
5ql/8 -3ql/8
11
14、
A 1
A
EI
l
杆端弯矩
杆端剪力
B MAB
MBA FQAB
FQBA
i
-i
0
0
12
15、
a
A
F
b
EI
l
16、
q
A
EI
l
杆端弯矩
杆端剪力
B MAB
MBA FQAB
FQBA
-Fa(l+b)/2l -Fa2/2l F
0
a=0
-Fl/2
X1
B
X2 X1 =1
X2 =1
11
l EI
22
l3 3EI
12
l2 2EI
M2 Fa
1F
Fa2 EI
2F
Fa2 6EI
(3b2a)
F MF
4
F
A
aC
b
B
l
F
A
C
X1
B
X2
F ab 2
l2
F a 2b
l2
M
解得:
X1
结构力学第8章 力矩分配法(31-33)
4/7 A
2 1/2
3/7
C 3 4 0 0
SBA = 4i SBC = 3i
B
4
4. 传递力矩
2 A
B 3
C M图(kN· m)
2.3 结点力矩下单结点力矩分配的解题步骤
例2:若梁线刚度 i 相同,用力矩分配法求梁各杆端弯矩。
M=7kN· m
A 1. 结点力矩 2. 分配系数 3. 分配力矩 B C
■ 约束力矩等于固端弯矩之和。
(2)在结点B加上一个力偶-MB。
(3)两种情况叠加,得到实际杆端弯矩。
总结 ■ 先在刚结点B上加阻止转动的约束,把连续梁 分为单跨梁,求出杆端弯矩。结点B各杆固端弯矩之 和即为约束力矩MB。 ■ 去掉约束,求出各杆B端新产生的分配力矩和 远端新产生的传递弯矩。 ■ 叠加各杆端的力矩就得到实际的杆端弯矩。
θB
MAB A 2iB
θB
C 0 MCB
B MBA MBC B 4iB 3iB
1)B点产生转角 SBA=4i SBC=3i
例1:若梁线刚度 i 相同,求梁各杆端弯矩。 M
A
B
θB
C
SBA=4i
SBC=3i
(2)分配系数μ
Bj
S
B
S Bj
是指杆件转动刚度与结点连接所有杆件转动刚度和的比值。
BA
M BA
S BA 4i 4 S BA S BC 4i 3i 7
4 MB 7 M BC 3 MB 7
BC
3 7
例1:若梁线刚度 i 相同,求梁各杆端弯矩。 M
A
B
θB
C
4 3 M BA M B M BC M B 7 7 (3)传递系数C
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章位移法和力矩分配法一、判断题(“对”打√,“错”打)1.位移法和力矩分配法只能用于求超静定结构的内力,不能用于求静定结构的内力。
()2.用位移法求解图示结构基本未知量个数最少为5。
()3.对于图(a)所示结构,利用位移法求解时,采用图(b)所示的基本系是可以的。
()(a)(b)4.图示两刚架仅在D点的约束不同,当用位移法求解时,若不计轴向变形则最少未知量数目不等,若计轴向变形则最少求知量数目相等。
()(a)(b)5.图(a)所示结构的M图如图(b)所示。
()(a)(b)6.某刚架用位移法求解时其基本系如图所示,则其MF图中各杆弯矩为0,所以有附加连杆约束力FR1F=0。
( )7.图a结构用位移法计算的基本系如图b,则其2图如图c所示。
()(a) (b)(c)8.图示连续梁在荷载作用下各结点转角的数值大小排序为A>B>C> D. ( )9.图示两结构(EI均相同)中MA相等。
()(a)(b)10.下列两结构中MA相等。
()(a)(b)11.图示结构结点无水平位移且柱子无弯矩。
()12.图示结构下列结论都是正确的:. ( )13.用位移法计算图示结构,取结点B的转角为未知量,则. ( )14.图a对称结构(各杆刚度均为EI)可以简化为图b结构(各杆刚度均为EI)计算。
()(a)(b)15.图a对称结构可以简化为图b结构计算(各杆刚度不变)。
()(a)(b)16.图a对称结构可以简化为图b结构计算。
()(a) (b)17.图(a)所示对称结构,利用对称性简化可得计算简图,如图(b)所示。
()(a) (b)18.图示结构中有c点水平位移和BE杆B点弯矩()19.图示结构的弯矩图与是否有AB杆和BC杆无关。
()20.用力矩分配法计算图示结构,则分配系数μCD=,传递系数。
()21.根据力矩分配法,图示结构最后弯矩有关系:()22.图a所示连续梁当线刚度i2»i1时,可简化为图b结构按力矩分配法计算。
()(a)(b)(b)23.图示连续梁发生支座移动如图所示,用力矩分配法计算时结点C的不平衡力矩为零。
()24.图a所示结构可简化为图b结构,用力矩分配法计算。
()(a)(b)三、填空题1.用位移法求图示桁架受对称荷载时,基本未知量个数最少为个。
2.图示结构用位移法求解时,基本未知量个数最少为个。
3.图示单跨梁当A支座有垂直向下单位位移时,MAB= 。
当支座A有垂直于AB的向右下方的单位位移时,MAB= 。
当支座A在水平方向有单位位移时,MAB= 。
4.根据互等定理知道位移法典型方程中的副系数kij=kji,该互等定理可由互等定理导出。
5.若如图示刚架在mB的作用下,B结点产生单位转角。
则mB= 。
(各杆杆长l,刚度为EI)6.对图示结构用位移法求解时,其典型方程一般形式为,其中系数项k11= ,自由项FR1F= 。
7.某结构用位移法求解时,基本系如图所示,则典型方程中的系数k11= ,k12= ,k21= ,k22= ,自由项FR1F= ,FR2F= 。
8.图示结构,EI=常数,已知结点C的水平线位移为,则结点B的角位移B= ,转向为。
(填顺时针或逆时针)9.图示结构,EI=常数,已知结点D的转角,则MDB= ,且侧受拉。
MCD= ,侧受拉。
10.欲使图a和图b中的MB=MB′,则。
11.图示结构A点的弯矩MA= 。
12.利用位移法判断结点A的转角A的转向为。
13.已如图示结构中,则C点水平位移△c=。
14.利用位移法概念求图示结构支座反力FRD= 。
15.图示结构用位移法计算,取结点B的水平位移△1为未知量,则系数k11= 。
16.图示为一连续梁的位移法基本系,则系数k12= , k22= 。
17.图示对称刚架受对称荷载,由位移法可知,MCB= kN·m ,MAB=kN·m.18.图示结构,FQCB= ,FQBE= 。
19.图示结构,MCB= ,侧受拉,MBC= 。
20.图示结构,根据结构和荷载特点分析得FNCB= ,FQCB= 。
21.力矩分配法中,传递系数表示当杆件近端有转角时,与的比值,它与杆件远端的有关。
22.图示结构用力矩分配法计算时,A点的不平衡力矩m= 。
23.用力矩分配法计算图示结构,则分配系数μAB= ,传递系数CAC= 。
24.图示结构用力矩分配法求解时,其结点不平衡力矩mk= .25.图示结构的弯矩MBA= ,MBC= 。
(顺时针为正)26.用力矩分配法计算图示刚架,则分配系数μBA= ,传递系数CBA= 。
(各杆l,EI相同)27.力矩分配法与位移法在消去附加刚臂作用的做法上的不同是:位移法通过满足典型方程使各刚架上反力矩为零,而力矩分配法则是。
一、是非题1、×.位移法取结点位移为基本未知量、附加约束的结构为基本结构,所以也可以用于求静定结构内力,力矩分配法亦类似,但它只可求解无结点线位移的静定结构。
力法须解除多余约束,故不可用于求静定结构内力。
2、×.铰上方的刚结点转角可不取未知量,该题基本未知量数最少为3个(一个线位移、两个角位移)。
3、√.是可以的,但未知量数不是最少的。
矩阵位移法电算中就是这样处理的。
4、√.不计轴向变形基本未知量为(a)4个、(b)3个,计轴向变形均为6个。
5、√.中间的铰无线位移并将结构分为三个部分,它们之间无力矩的传递,可独立画出各自的弯矩图。
6、×.根据截面剪力平衡条件可知。
7、√.注意此时斜杆只有刚体位移无弯矩。
8、√.可根据下列步骤作定性分析:(1)草绘弯矩图和挠曲线图,(2)按超静定结构求位移的方法,取三跨简支梁为静定基本系,(3)分别建立虚力状态计算各跨简支梁两端转角,根据图乘法分析可比较出各支座处转角的大小。
9、√.按力矩分配法计算,两结构的分配系数、传递系数和固端弯矩均相同,故可得出结论。
用位移法分析也可以得出该结论。
10、√. 两结构相对线刚度相同, 分配系数、传递系数和结点不平衡力矩均相同。
11、√. 此结构因水平杆,故刚结点无转角,又若有结点水平线位移,则横梁在水平方向无法平衡,故也无结点水平位移,所以柱子无弯矩。
12、√. 因BC杆,故;若,则ABC杆水平方向无法平衡,故;由于以上两点,BD杆无弯矩;AB 杆相当于B端固定A端铰支,故有。
13、√. 该结构无结点线位移.位移法固定状态下,两杆B端抗弯劲度为,故得。
14、×.因荷载反对称,故在半结构中,原来位于对称轴上的杆的刚度应取为。
15、√.对称结构受对称荷载作用,位于对称轴上两刚结点只能上下移动,但受两斜杆支撑又不能上下移动,故相当于固定。
16、√.对无支座的平衡体,可假设某点相对不动(即固定),对该结构设最下面结点相对固定,其半结构即图(b).17、√.因对称,两刚结点处无转角和水平位移,不仅如此,竖杆任一点也无转角、无水平位移和无弯矩。
简化后的半结构在两刚结处位移条件与原结构相同,故两横梁弯矩不变。
18、×.根据ABCD水平方向平衡可知,E点处无水平约束力,故,但是FEG部分不对称,E点有水平位移要引起C点水平位移。
19、√.因结构对称受对称荷载,B结点无转角和无位移,只有水平杆有弯矩,去掉两斜杆后,以上状态不变。
20、√.结构中D点无转动和移动,可视CD杆为两端固定梁来考虑(当C结点转动时)。
21、×. A端向B端的传递系数,只有当B端固定无转动时才等于,而现在B端为弹性的,故不成立。
22、√.根据条件,第一跨相当于两端固定梁,可求出右端弯矩为,其他部分可简化为图(b)计算。
23、√.力矩分配法固定状态下,BC杆为两端固定梁,求出支座位移作用下的固端弯矩即可叠加出不平衡力矩。
24、√.左边F简化为结点外力偶,右边F简化为杆端外力偶,简化去掉的杆的弯矩按静定法求出。
二、选择题1、B. 左边铰上刚结点转角可不取为未知量,右边铰连接的刚结点转角要取为未知量。
2、C. 其他三图结构均有结点线位移。
3、D. 图A结点无转角,若有水平线位移,则横梁在水平方向无法平衡;图B由对称性,可知无水平线位移;图D结构中间的两刚结点有线位移,独立线位移1个。
4、C. 组合结点铰端转角不是基本未知量。
5、A. 结点A无线位移,又假设A点不能转动,则B、C点也不能转动和位移,故只有一个基本未知量。
6、C. 因为必须。
7、A. BA杆B端抗弯劲度为0。
8、C. A点向右,B点向上,AB杆转的角度为;AB杆两端垂直杆轴的相对位移为杆长乘转角,即;杆件按两端固定梁计算得杆端弯矩。
9、B. 根据位移法,要,必须自由项,即可求得。
10、C. 左边四个竖杆对的贡献均为;右边四杆中除右下角的杆子外,对的贡献均为。
11、D. 结点上集中力F要考虑。
12、D. 应等于各杆A端抗弯劲度之和,右横梁抗弯劲度为0。
13、A. 应等于各杆刚结点处的固端弯矩之和,右边的集中力可简化成结点集中力偶6kNm。
14、A. 图b结构A结点无线位移,受结点集中力作用时结构无弯矩。
图a结构则非。
15、B. 由ABCE部分水平方向平衡条件知E点无水平约束力,故此部分为对称受力状态,故有。
其他三个均不为0。
16、C. 不引起;F可视为反对称荷载,由此求出底部两水平反力为,则可求出。
17、C. 由对称知,则可求.B点无线位移,则A点的弯矩为B点的一半.故有。
18、D. 因为图D结构有侧移。
19、A. 注意杆AD的抗弯劲度为0,AB杆与两端固定梁一样。
20、C. 注意分配系数的计算式并非它的定义。
21、B. 分配系数、传递系数是结构固有的,与荷载无关。
22、A. 水平杆无弯矩,又刚结点无线位移故按传到固定端。
23、C. 用力矩分配法分析,图b结构两杆分配系数和传递系数均相同,故有和截面弯矩相等;其他等式均不成立。
24、A. 按力矩分配法概念,作用结点C的外力偶矩全部分配给CD杆C端(分配系数)。
三、填空题1、6. 由于结构约束不对称,虽然受力对称但位移不对称,有四个水平位移和3个竖向位移未知量,考虑到结构最终保持对称的变形状态。
A ,C两点竖向位移相同,故基本未知量为6个。
2、1. 若将下面一个刚结点加刚臂约束住,则上面一个刚结点就不能转动和移动。
3、 0,,. A支座向下移动,AB杆向下平移;A支座垂直于杆轴移动时,可按一端固定,另一端铰支处理;A支座向右水平移动,B点向上,AB杆转过的角度为 ,引起两端相对位移为,进而再按一端固定一端铰支计算固端弯矩。
4、反力, 虚功。
5、. 应等于各杆B端抗弯劲度之和。
6、, , 0. 该结构只有一个水平线位移未知量。
7、, , , , 0, . 注意在作用下,斜杆为刚体平移,无弯矩。
8、, 顺时针. 建立一个位移法方程:即可求出(即)9、, 右, , 下. 可按计算,简单地也可按单跨梁分别计算:,也可按两端固定梁AD,受及F作用的结果相叠加得到。