Adams与AMESim联合仿真实例
液压支腿机械液压联合仿真分析——基于adams与amesim

农机化研究
第8 期
液压支腿机械液压联合仿真分析
一基于ADAMS与AMESi m 刘威, 孟祥金,沈从 举,汤智辉, 贾首星,郑炫 ,周艳
( 新疆农垦科学院机械装备研究所,新疆石河子832000)
摘要:以机械平衡用的果园多功能移动作业平台液压支腿为研究对象.分别建立了实体模型与液压回路模
型,通 过机构简 化与分析 构建了支腿 运动方程 ;分析了 双作用单活 塞杆在液 压缸内速度 以及缸内 液体压力 的变
化规律,利用ADAMS和AMESi m软件进行了参数化设计及联合仿真,并对仿真结果进行了分析。其结果证明了
液压支 腿机械液 压联合仿 真控制闭 环模型的 可行性, 为液压支 腿设计与 优化提供 了捷径, 使结构设 计与仿真 模
竺基銎盒黧璜:目2:0丘兵团团1工1-业T1科㈣2拄-2攻2栅关芒计计划剖项项目目( f 2010GG081)
l1车 牛身 爿22油缸 i Ⅲ缸札筒 虬3口油1缸 唧I活 自寒 霹杆 r r
作者筒介:刘戚( 1983一) .男.胡北天门人.助理研究员,( E—ma i l ) 4连接铺钉5支腿6.马蹄片
死区容积对液缸活塞杆移动距离的影响;
2) 机构均为焊接薄钢板, 可考虑将支腿重力看成
是一恒定负载;
3) 机构各铰接处摩擦及销钉微小质量等对机构整
体运动的 影响。
cos 口=韭掣 在三角形OAC中,根据余弦定理有 os口:生坚÷世
…( 1)
化简 得
口: a咖。 立芷÷ 叫 (2)
一i I 乏黟∞’ 由式(2)及运动学关系可得 埘 ==■ 可 i t ( bc +t 石 v) 万 叵 予 ‘ 3)
型更符合工程实际,有助于提高系统性能。
Adams和AMESim联合仿真的设置和简单例子(都是13版本)
Adams和AMESim的联合仿真前言:本人并不是Adams和AMESim的高手,接触AMESim的时间很短,但是需要做Adams和AMEsim的联合仿真,这里分享一下我探索联合仿真的经验。
目录如下:一、仿真前需要做的准备。
1、软件的安装2、环境变量的设置二、一个具体的联合仿真例子。
(这里只介绍Adams主控的仿真)***********************************************************一、仿真前的准备1、软件的安装软件的版本对联合仿真有重要影响,这里只介绍我自己安装软件的情况。
我的系统是win7 32位,安装的软件是Adams2013、LMS b AMESim Rev 13、Visual Studio 2010。
Adams2013和AMESim Rev 13网上有很多下载资源和安装教程。
这里我只强调一下Visual Studio 2010。
也就是可以建立两个仿真软件联系的Visual C++程序。
Visual C++和VisualStudio等之间的关系大家可以自己在网上查,其实都包含有C++语言。
网上有些教程是用VC++6.0来建立两者之间的关系,但是我安装了VC++6.0的各种版本(企业版,中文版,英文版)都没有成功建立仿真,后来安装了完整的Visual Studio 2010就可以了,但是Visual Studio 2010有些大,我下载的是1.75G。
另外就是安装顺序,最好先安装VC++或者VS(我是最后安装的Visual Studio 2010,先安装的说法我这里并没有证实)。
下面是我的软件的安装位置,安装目录没有中文D:\zy\ADAMSD:\AMESimD:\Program Files\Microsoft Visual Studio 10.0在最后安装好Visual Studio 10后把D:\ProgramFiles\Microsoft Visual Studio 10.0\VC\bin下的nmake和vcvars32文件拷贝到AMESim的安装目录下D:\AMESim\v1300。
基于adams和amesim的斜盘式轴向柱塞泵联合仿真
机技术、传感和信号技术的,虚
机技术随之产生[3*(虚 机技术是
多
个 的 工具, 研究对象的本质因素进行
,
现与物理样机的无限接近,因 对于虚
机的仿 的研
对物理样机的 ,缩
期[4*(
等[5*
数字式
虚 机,通虚 机仿真和试验测试,对
数字式
的流量、压力和功率 等功能进行
研究。Monika等[6*进行了单
型 验,对
Abstract: As one of the most impoOant friction pairs in the swash plate axial piston pump, the piston pais plays an impoOant ole in the mechanical efficienca, temperature rise, volumetac efficienca, workin/ life and work reliability of tte piston pump. The swash plate type axial piston pump was taken as the reseerch object, and the three-dimensional /eometric modd of the piston pair wn established through analyzin/ the force of the piston paie Then the physical modd of the VOuI prototype wn established through controllin/ the relationship between force and motion of the three-dimensional geometac mode, and the displacement, velocity and acceleration cuoes of plunger are obtained. Based on the hydraulic pressure modd established by AMESim, tOe united simulation of tOe dynamic modd and thehydraulic modd of the piston pump was implemented. The pressure distribution in Oie plunger cavity is obtained by the hydraulic model, which lays a foundation to the desifn of plunger cavity and tlie study of oil film characteostics.
基于ADAMS和AMESim的升降鳍板锁紧系统特性仿真

个 零 部 件柔 性对 整 个 系 统 的 影 响 , 确 定 贴 近 实
际 情 况 并 利 于 计 算 的 刚 柔 混 合 模 型 。 在 A ME S i m建 立 液 压 系 统 模 型 并 验 证 其 正 确 性 的 基 础 上 J , 利 用 AD A MS和 A ME S i m 的 软 件 接 口( A D AMS — A ME S i m I n t e r f a c e ) 进 行 实 时 数 据
系统仿真流程见 图ቤተ መጻሕፍቲ ባይዱ1 。
在P r o / E 中构 建 锁 紧 系统 的三 维 模型
升 降鳍板 锁 紧机 构作 为保 证仪 器舱 快速 有效 地锁
紧在 所 需 探 测 部 位 的 装 置 , 其 重 要 性 不 言 而
喻 。
升 降鳍板 锁 紧机 构 由液压 缸运 动来 驱动 锁 紧
A MS / E x c h a n g e 模 块导 人到 A D A MS 。
4 7
第 一作者简介 : 段晓羽( 1 9 8 5一) , 女, 硕士 , 助理工程师
研究 方向 : 轮 机 工 程
E- ma i l : d x y s me r i @1 2 6. c o m
基于 A D A MS和 A M E S i m的升降鳍板锁 紧系统特性仿真
段晓羽, 赵 旭, 张俊 武
( 中船 重 工 集 团 公 司第 七 。四 研 究 所 , 上海 2 0 0 0 3 1 )
摘
要: 以A D A MS为平 台, 结合 P r o / E中建立 的三维 模型和 A ME S i m 中建立 的液压系统模 型 , 建立 升降
AMESim与ADAMS联合仿真步骤及相关注意事项
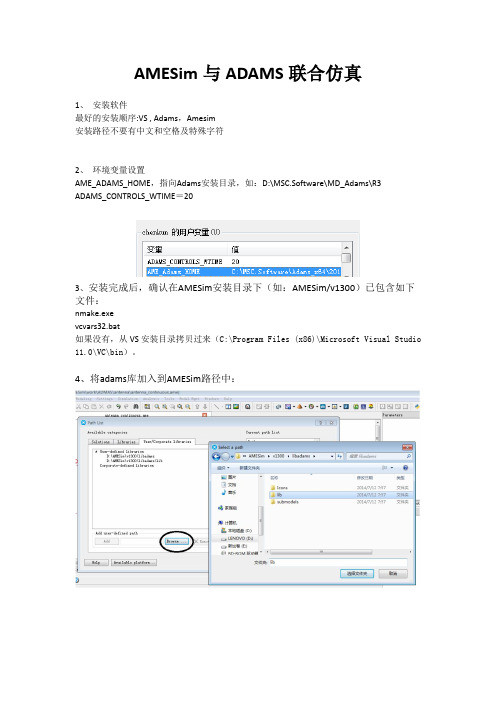
AMESim与ADAMS联合仿真1、安装软件最好的安装顺序:VS , Adams,Amesim安装路径不要有中文和空格及特殊字符2、环境变量设置AME_ADAMS_HOME,指向Adams安装目录,如:D:\MSC.Software\MD_Adams\R3ADAMS_CONTROLS_WTIME=203、安装完成后,确认在AMESim安装目录下(如:AMESim/v1300)已包含如下文件:nmake.exevcvars32.bat如果没有,从VS安装目录拷贝过来(C:\Program Files (x86)\Microsoft Visual Studio 11.0\VC\bin)。
4、将adams库加入到AMESim路径中:五、如果提示MSSDK问题,安装GRMSDKX_EN_DVD.iso。
也就是安装Windows SDK7.1如果安装时报错,可按照方法:卸载比Microsoft Visual C++ 2010 x86 Redistributable - 10.0.30319 以及Microsoft Visual C++ 2010 x64 Redistributable - 10.0.30319更高的版本。
如果还出错,在安装时不要选择安装VC-Compiler,其它选项默认即可。
如果卸载了上面的两个组件,则需要安装VBVCRedist中的两个补丁,只需要选择两个卸载的补丁即可。
六、如果提示AsUtility_imp.lib的link错误,在C盘中搜索,找到该文件,再放到AMESim 模型所在工作目录。
(一般不需要此项。
)七、64位操作系统中:AMESim中选择Microsoft Visual C++编译器,Subplatform type选择win64。
如下图八、接口类型为ADAMS还是AdamsCosim,决定于是用离散耦合,还是连续的。
Adams or AdamsCosim depending whether you want to run discrete coupling or continuous export选择AdamsCosim则adams中应该为Discrete。
AMESim和ADAMS联合仿真实现一种位置控制系统
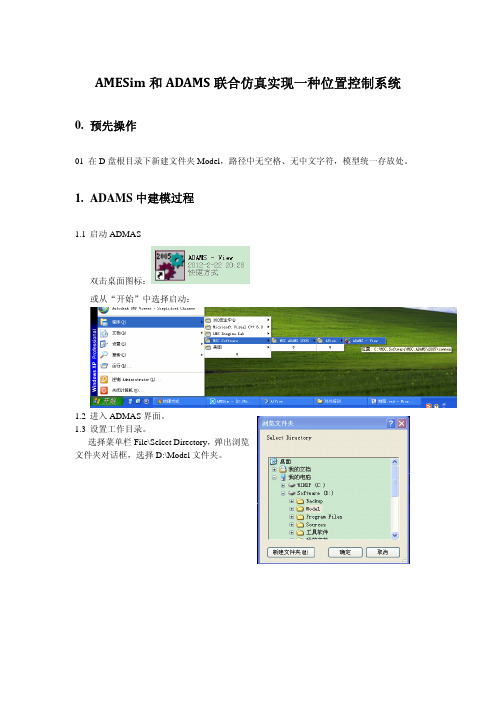
AMESim和ADAMS联合仿真实现一种位置控制系统0.预先操作01 在D盘根目录下新建文件夹Model,路径中无空格、无中文字符,模型统一存放处。
1.ADAMS中建模过程1.1启动ADMAS双击桌面图标:或从“开始”中选择启动:1.2进入ADMAS界面。
1.3设置工作目录。
选择菜单栏File\Select Directory,弹出浏览文件夹对话框,选择D:\Model文件夹。
1.4弹出主工具栏。
选择菜单栏\View\Toolbox andToolbars,勾选Tool Settings中Main Toolbar,弹出工具栏,如右图所示。
1.5ADAMS中按F4调出位置/坐标显示。
1.6设置重力加速度。
选择菜单栏\Setting\Gravity,设置重力加速度,此时弹出Error对话框。
选择“Create Moder”,并起名为“Qiu”,点击“OK”再次选择菜单栏\Setting\Gravity,设置重力加速度:勾选Gravity前方框,点击-Y*,如下图示,点击“OK”。
1.7设置单位。
选择菜单栏\Setting\Units,设置单位,此时弹出“UnitsSettings”对话框,点击“MKS”按钮,各单位符号如右图示,点击“OK”。
1.8建立半径10cm的球,放置在点(0,0,0)上。
“右键”点击主工具栏第一排第二个符号-刚体:连杆,弹出扩展工具符号,选择第二排第一个符号-刚体:球,勾选Radius前方框,则此球半径为10.0cm。
1.9建立球与大地之间移动副。
“右键”点击主工具栏第二排第二个符号-连接:旋转副,弹出扩展工具符号,选择第二排第一个符号-连接:移动副。
该移动副属性为2个构件,1个作用点。
鼠标动作顺序为:1.左键点击“ground”一次,选取大地为第一个构件;2.左键点击球体一次,选取球为第二个构件;3.右键在球心位置点击一次,弹出Select对话框,左键双击“PART_2.cm”;4.右键在球心位置点击一次,弹出Select对话框,左键双击“PART_2.cm.Y”。
基于Adams与Amesim的二维精密高速转台机电联合仿真分析
2024 年 3月第 61 卷第 2 期Mar. 2024Vol. 61 No. 2四川大学学报(自然科学版)Journal of Sichuan University (Natural Science Edition)基于Adams与Amesim的二维精密高速转台机电联合仿真分析杨嘉宾1,2,胡晓兵1,2,毛业兵1,2,陈海军1,2,傅玉聪1,2,王涵1(1.四川大学机械工程学院,成都 610065; 2.四川大学宜宾园区,宜宾 644000)摘要: 为解决高精度转台的位置控制精度问题,以二维精密高速转台为研究对象,使用Ad‑ams软件建立转台动力学模型进行仿真分析,以固定角度驻留效果来评价模型精度,实现了动力学仿真与分析.为进一步提高模型驻留精度,采用Amesim软件和Adams软件开展了联合仿真,由Adams软件负责传动计算求解,Amesim软件进行位置控制.相较于仅使用动力学模型进行仿真,联合模型的仿真结果相对误差在60°和120°的驻留分别减小到0.13%和0.09%,从模型精度上保证了联合模型在二维精密高速转台设计或改造上的准确性.最后对传动座样机进行测试,记录样机真实驻留角度,验证了联合模型的准确性和精度.关键词: Adams;机电联合仿真; Amesim中图分类号: TP39 文献标志码: A DOI:10.19907/j.0490-6756.2024.023002Electromechanical joint simulation analysis of two-dimensionalprecision high-speed turntable based on Adams and AmesimYANG Jia-Bin1,2, HU Xiao-Bing1,2, MAO Ye-Bing1,2,CHEN Hai-Jun1,2, FU Yu-Cong1,2, WANG Han1(1.School of Mechanical Engineering, Sichuan University, Chengdu 610065, China;2.Yibin R&D Park of Sichuan University, Yibin 644000, China)Abstract: To solve the position control accuracy problem of high-precision rotary tables, a two-dimensional precision high-speed rotary table was studied using Adams software to establish a dynamic model for simula‑tion analysis.The model accuracy was evaluated based on the fixed angle retention effect, achieving dynamic simulation and analysis.In order to further improve the model retention accuracy, joint simulation was carried out using both Amesim and Adams software,with Adams software responsible for transmission calculation and solving,and Amesim software for position pared with using only the dynamic model for simulation, the relative errors of the joint model simulation results at the retention angles of 60° and 120° were reduced to 0.13% and 0.09%, respectively, ensuring the accuracy of the joint model in the design or modifi‑cation of two-dimensional precision high-speed rotary tables from the perspective of model accuracy.Finally,the transmission seat prototype was tested,and the actual retention angle of the prototype was recorded to verify the accuracy and precision of the joint model.Keywords: Adams; Co-simulation; Amesim收稿日期: 2023-03-06基金项目: 四川省科技计划重点研发项目(2022YFG0072);川大-达州专项(2020CDDZ-12);川大-宜宾专项(2020CDYB-3)四川省科技计划项目(2022ZHCG0049);作者简介: 杨嘉宾(2000—),男,四川达州人,硕士研究生,研究方向为机械电子工程.E-mail: 940530700@通讯作者: 胡晓兵.E-mail: scuhxb@第 61 卷四川大学学报(自然科学版)第 2 期1 引言无线电通信、广播、电视、雷达、导航、电子对抗、遥感等利用电磁波来传递信息的工程系统,都需要依靠天线来实现,其中雷达天线在国防安全中起着关键作用,天线系统的精度要求较高[1,2].转台位姿控制的精度问题成为重点问题.因二维精密高速转台的制造和运行成本较高,通常会对其进行仿真分析[3-5].李梅现[6]使用Adams软件对雷达传动座进行仿真分析;刘智键[7]使用Adams软件研究自动化钻机动力学特性;Xu等人[8]使用Adams软件进行仿真分析探究汽车转向系统;刘凯磊等人[9]提出Ad‑ams软件和amesim软件进行机液联合仿真,对挖掘机轨迹控制进行仿真分析提高系统精度;杨键[10]使用Adams软件和Matlab软件进行联合仿真,为天线运动稳定性的进一步研究提供参考.现阶段大多数研究都使用Adams软件进行仿真分析,但控制精度不够理想,且运行过程拟合度不高.传统单个仿真分析软件在分析较复杂的二维精密高速转台伺服系统时很难反映系统的实际运行情况.AMEsim软件在对机械模型进行动力学仿真分析时,简化模型的具体轮廓特征,且只能添加标准件,很难准确地模拟系统工作情况,仿真结果误差较大;ADAMS作为CAE领域应用最广泛的机械系统动力学仿真分析软件,采用虚拟样机技术,在建立完整复杂模型的基础上提供多种积分求解算法,且求解速度快,求解精度高,可以对系统运动、受力等进行较准确的仿真分析[11],但系统的运动控制局限于驱动和力函数,在运动情况较为复杂时很难模拟实际运动情况;Matlab软件的Simulink工具箱广泛应用与控制理论和复杂仿真,但Amesim软件有功能强大的电机库,可直接调用本文提到的转台使用的PMSM电机,且更容易确定电机参数.因此,由Amesim软件进行位置控制[12-13],Adams软件进行传动,开展机电联合仿真,提高整体模型求解精度[14],更加贴近二维精密高速转台样机的运动情况.2 动力学模型建立2.1 三维模型简化二维精密高速转台的传动系统是传输动力让二维精密高速转台的方位与俯仰方向做回转运动.动力源是电机,传动链主要由是减速器、齿轮、转盘轴承及其他连接件、转接件等组成.二维精密高速转台伺服传动系统的传动原理示意图如图1所示.在Solidworks中建立二维精密高速转台的三维模型,如图2所示.二维精密高速转台模型总零件有两千多个,如果直接转换为X_T格式文件导入Adams中会非常复杂,故对模型进行简化,保留主要的传动部件,选取底座,齿轮,轴,轴承等零件重新进行装配,根据传动路线选取零件,装配过程注意零件的自由度、定位和装配方式.简化后的模型如图3所示.图1 二维精密高速转台伺服传动系统传动原理示意图Fig.1 Transmission principle diagram of two-dimensional precision high-speed turntable servo transmissionsystem图2 二维精密高速转台三维模型Fig.2 Three-dimensional model of two-dimensional preci‑sion high-speed turntable1-基座;2-偏心盘;3-减速器;4-电机;5-驱动齿轮;6-转盘轴承;7-安装台体;8-上底座;9-立柱;10-轴承;11-扇形齿轮;12-小齿轮图3 简化模型Fig.3 Simplified model第 2 期杨嘉宾,等:基于Adams与Amesim的二维精密高速转台机电联合仿真分析第 61 卷简化后将模型导入Adams软件,对部件进行重命名和材料定义.2.2 Adams模型建立二维精密高速转台有两个自由度,方位转台旋转和俯仰转台旋转.零部件分为两类,第一类是基座及与基座固定的零部件;第二类是参与旋转的俯仰机构和方位机构.在第一类零件之间添加固定副,在第二类零件之间添加旋转副.约束明细如表1所示.在电机输出轴和齿轮上添加力矩,模拟电机输出,在齿轮间和轴承间添加接触力.二维精密高速转台启动力矩主要由负载惯性力矩、轴承摩擦力矩和风力矩组成,其余的力矩很小可以忽略.设在15 m/s的风速下,启动20 s内达到额定转速8 r/min.(1)风力矩.M f=C M×P×S×D(1)M f=C M×v2/1600×S×D=0.5×152/1600×3.84×1.6=0.513 (kN⋅m)=513 (N⋅m)(2)式中,C M为风力矩系数;D为回转轴向尺寸,D= 1.6 m;S为迎风面积,这里取最大的迎风面积(按设计图纸估算为2.4 m×1.6 m=3.84 m2)(2)惯性力矩.M=J×α(3)式中,J为转动惯量;α为加速度.方位转台负载设为长方体形状,绕方位轴旋转,因此转动惯量为J=m×(a2+b2)/12+m×r2(4)设转动在20 s内从0加速到8 r/min,故α= 8×2π/(60*20)=0.042 rad/s2,负载质量m=3000 kg,a为长2.4 m,b为厚0.84 m,因此有惯性力矩. M g=[m×(a2+b2)/12+m×r2]×α=[3000×(2.42+0.842)/12+3000×0.12]×0.042=69.1 (N⋅m)(5)转盘轴承的摩擦力矩根据经验估算为:M Q= 50 N⋅m.需要启动力矩:M′=M f+M g+M Q=513+69.1+50=632.1 (N⋅m)(6)要得到电机输出转矩,还需要计算转盘轴承到电机的减速比.驱动齿轮与转盘轴承之间的减速比为i方1=Z1/Z2=125/20;减速器的减速比为i方2=60;总的减速比为:i方=i方1×i方2=375.在载荷计算中方位传动座的启动力矩为632.1 N⋅m,取安全系数1.3,电机输出力矩至少大于632.1×1.3/375=2.19 N⋅m.取电机输出轴力矩大小为2.2 N⋅m.2.3 仿真分析验证建立的动力学仿真模型,测试方位转台旋转60°和120°的驻留情况.由启动期间的加速度大小,计算得到两种情况的运转时间分别为7.071 s和10 s,且未达到额定转速,处于加速阶段,在转盘轴承上添加marker点,测试该点的旋转角度,将方位电机输出力矩大小设置为2.2 N⋅m,在Adams软件里进行仿真,如图4和图5所示.Adams软件里角度单位默认是弧度.经计算,实际旋转角度分别为58.99°和 118.65°,驻留角度相对误差为1.68%和1.13%.由于添加接触力,运动时各零件之间存在阻力,旋转角度偏小,且在实际运动情况中,驻留需要加速阶段和减速阶段,因此只使用Adams软件很难反映传动座实际运行情况,下文将加入Amesim软件进行联合仿真.表1 模型约束Tab.1 Model constraint部件1基座偏心盘减速器电机驱动齿轮转盘轴承内圈垫环安装台体上底座立柱轴承外圈轴承内圈扇形齿轮驱动齿轮转盘轴承外圈扇形齿轮小齿轮部件2大地基座偏心盘减速器减速器轴基座转盘轴承外圈垫环安装台体上底座立柱负载轴负载轴大地大地立柱立柱运动副固定副固定副固定副固定副固定副固定副固定副固定副固定副固定副固定副固定副固定副旋转副旋转副旋转副旋转副连接点基座质心偏心盘质心减速器质心电机质心减速器轴质心轴承内圈质心垫环质心安装台体质心上底座质心立柱质心轴承外圈质心轴承内圈质心扇形齿轮质心驱动齿轮质心转盘轴承质心扇形齿轮旋转轴一点小齿轮质心第 61 卷四川大学学报(自然科学版)第 2 期3 联合模型搭建3.1 动力学模型转换将输入变量与电机输出轴力矩关联,Amesim 软件可以通过接口控制Adams 软件里的力矩大小,做到可以实时改变输出力矩大小以满足系统的复杂动作.在ADAMS/Control 模块中创建软件接口,导出动力学模型的FMU 文件,如图6所示.3.2 amesim 模型搭建在Amesim 软件建立二维精密高速转台控制模型,导入FMU 文件代替机械模型,在联合模型里添加速度环和位置环,与电机的电流环组成整个系统的位置控制系统,采用PID 算法[14-16]进行转台的位置闭环控制,联合模型如图7所示,联合模型搭建流程如图8所示.图4 60°驻留曲线Fig.4 60° resident curve图5 120°驻留曲线Fig.5 120° resident curve图6 导出FMU 文件Fig.6 Export the FMU file图7 联合仿真模型Fig.7 Co -simulation model第 2 期杨嘉宾,等: 基于Adams 与Amesim 的二维精密高速转台机电联合仿真分析第 61 卷3.3 仿真分析对比在AMESim 设置系统仿真时长为15 s 、时间间隔为0.001 s 、AMESim 与ADAMS 的联合仿真数据交换时间间隔为0.001 s ,仿真得到如图9和图10所示的曲线.二维精密高速转台的驻留精度要求在±0.5°以内,方位转台的运行范围是0~360°,则驻留精度标准应为1/360=0.28%.实验结果表明,模型的相对误差分别为0.13%和0.09%,满足精度要求.联合仿真模型较动力学模型有着更好的驻留效果,且添加PID 控制之后对模型精度有了显著的提升,模型仿真结果对比如表2所示.图8 联合模型搭建流程图Fig.8 The co -simulation model builds the flow chart图9 60°驻留仿真结果Fig.9 60° resident simulation results图10 120°驻留仿真结果Fig.10 120° resident simulation results第 61 卷四川大学学报(自然科学版)第 2 期4 二维精密高速转台测试分析对二维精密高速转台样机进行测试,二维精密高速转台测试框图如图11所示.按照图11连接测试仪器和设备,对伺服驱动机和伺服控制机进行上电操作,如图12所示.输入方位驻留角度点60°和120°,记录上位机显控界面各角度点的角度反馈值,如图13所示.60°驻留的测试结果相对误差在0.2%以内,120°驻留测试结果相对误差在0.14%以内.记录五次实验数据如表3所示.5 结论通过动力学模型、机电联合模型和传动座样机测试结果分析比较,可以得到以下结论:(1) 联合仿真模型的稳定性和精度较动力学模型有明显的提升,驻留角度相对误差减小到0.1%左右.且系统的运动情况更贴合实际,提高了二维精密高速转台的仿真模型精度,解决了传统Adams 软件在复杂系统运动控制上的不足问题.(2) 联合仿真模型和样机测试结果较贴合,且满足二维精密高速转台控制精度,考虑到重载转台的制造和运行成本较高,因此可以使用联合模型指导二维精密高速转台的设计或改造.(3) Adams 与Amesim 进行机电联合仿真具有较高的可行性,可以在机床摇摆头、关节机器人等相似的高精度系统中进行应用推广.参考文献:[1]Zhang J ,Wu X ,Chang H J.A real -time compensation method for high precision antenna test turntable [J ].J Astronaut Metrol Meas , 2022, 42: 39.[张健, 吴翔, 常慧娟, 等.一种高精度天线转台的实时补偿方法[J ].宇航计测技术, 2022, 42: 39.][2]Xie L.Research on high -precision phased array an‑tenna receiver system [D ].Nanjing :Southeast Uni‑versity , 2021.[谢力.高精度相控阵天线接收系统表2 仿真结果对比Tab.2 Comparison of simulation results模型动力学模型联合模型精度标准60°驻留相对误差/%1.680.131.66120°驻留相对误差/%1.130.090.83图11 测试框图Fig.11 Test block diagram图12 伺服控制分机Fig.12 Servo control extension图13 上位机界面Fig.13 Upper computer interface表3 样机测试数据Tab.3 Prototype test data60°驻留59°56′59°53′60°06′59°58′60°04′120°驻留120°04′120°08′119°56′120°01′119°50′第 2 期杨嘉宾,等:基于Adams与Amesim的二维精密高速转台机电联合仿真分析第 61 卷的研究[D].南京:东南大学, 2021.][3]Luo Q Y,Mei Q,Hu X B.Joint optimization of topol‑ogy and size based on modal analysis of 750 powerhead gearbox [J].J Mech Strength,2022,44:1357.[罗庆怡,梅琦,胡晓兵,等.基于750动力头变速箱模态分析的拓扑与尺寸联合优化[J].机械强度, 2022, 44: 1357.][4]Zhang X J,Hu X B,Jiang C J.Kinematics analysis and Simulation of five axis groove cutting robot basedon MATLAB [J].J Sichuan Univ (Nat Sci Ed),2021, 58: 063001.[张雪健,胡晓兵,蒋从军,等.基于MATLAB的五轴坡口切割机器人运动学分析与仿真[J].四川大学学报(自然科学版),2021,58: 063001.][5]Li M.Design and analysis of lifting platform for com‑pact millimeter-wave radar antenna [D].Chengdu:University of Electronic Science and Technology ofChina, 2016.[李梅.小型毫米波雷达天线升降平台的设计与分析[D].成都:电子科技大学, 2016.][6]Liu Z J.Research on dynamic characteristics of work‑ing device of automatic geological drillig rig pipe han‑dling systems [D].Beijing: China University of Geo‑sciences, 2019.[刘智键.自动化地质钻机移摆管系统工作装置动力学特性研究[D].北京:中国地质大学, 2019.][7]Xu F X,Liu X H,Chen W,et al.Modeling and cosimulation based on Adams and AMESim of pivotsteering system [J].J Engin, 2019, 13: 3926.[8]Zhou Y,Liu K L,Li X C,et bined simulation of excavator digging motion track control based onADAMS and AMESim [J].Mach Tool Hydraul,2021, 49, 146.[周宇,刘凯磊,李兴成,等.基于ADAMS和AMESim的挖掘机挖掘运动轨迹控制联合仿真[J].机床与液压, 2021, 49: 146.][9]Yang J.Research on motion stability of airborne dual satellite tracking antenna platform [D].Chengdu: Si‑chuan University, 2021.[杨键.机载双星跟踪天线运动平台稳定性研究[D].成都:四川大学, 2021.][10]Zhao J W, Zhang J J, Zhang C.Simulation of launch dynamics of aircraft based on ADAMS andAMESim [J].J Project Rock Missil Guid, 2021, 41,46.[赵君伟,张家骏,张程,等.基于ADAMS与AMESim的飞行器发射动力学仿真[J].弹箭与制导学报, 2021, 41: 46.][11]Hu J H, Zhang C, Wu Y,et al.Afuzzy adaptive pid control method for stabilized tracking system [J].Appl Mech Mater, 2013, 2560: 347.[12]Zhang X R,Kang L,Tang J P,et al.Trajectory tracking of lntelligent excavator using variable uni‑verse fuzzy multi-parameter self-tuning PID con‑trol [J].China J Highw Transp, 2023, 36, 240.[张新荣,康龙,唐家朋,等.基于变论域模糊多参数自整定PID控制的智能挖掘机轨迹跟踪[J].中国公路学报, 2023, 36: 240.][13]Fan L.The auto-erecting system design of a mobility meter band wave radar [D].Chengdu: University ofElectronic Science and Technology of China,2017.[樊雷.某机动式米波雷达架撤系统设计[D].成都:电子科技大学, 2017.][14]Li H, Du F, Hu X B.Research on improved BP neu‑ral network PID controller in gas concentration con‑trol [J].J Sichuan Univ(Nat Sci Ed),2020,57:1103.[李航,杜璠,胡晓兵,等.改进的BP神经网络PID控制器在气体浓度控制中的研究[J].四川大学学报(自然科学版), 2020, 57: 1103.][15]Zhang H,Hu B.The application of nonlinear PID controller in generator excitation system [J].EnergyProcedia, 2012, 17: 202.。
AMESim与ADAMS联合仿真步骤及相关注意事项
AMESim与ADAMS联合仿真1、安装软件最好的安装顺序:VS , Adams,Amesim安装路径不要有中文和空格及特殊字符2、环境变量设置AME_ADAMS_HOME,指向Adams安装目录,如:D:\MSC.Software\MD_Adams\R3ADAMS_CONTROLS_WTIME=203、安装完成后,确认在AMESim安装目录下(如:AMESim/v1300)已包含如下文件:nmake.exevcvars32.bat如果没有,从VS安装目录拷贝过来(C:\Program Files (x86)\Microsoft Visual Studio 11.0\VC\bin)。
4、将adams库加入到AMESim路径中:五、如果提示MSSDK问题,安装GRMSDKX_EN_DVD.iso。
也就是安装Windows SDK7.1如果安装时报错,可按照方法:卸载比Microsoft Visual C++ 2010 x86 Redistributable - 10.0.30319 以及Microsoft Visual C++ 2010 x64 Redistributable - 10.0.30319更高的版本。
如果还出错,在安装时不要选择安装VC-Compiler,其它选项默认即可。
如果卸载了上面的两个组件,则需要安装VBVCRedist中的两个补丁,只需要选择两个卸载的补丁即可。
六、如果提示AsUtility_imp.lib的link错误,在C盘中搜索,找到该文件,再放到AMESim 模型所在工作目录。
(一般不需要此项。
)七、64位操作系统中:AMESim中选择Microsoft Visual C++编译器,Subplatform type选择win64。
如下图八、接口类型为ADAMS还是AdamsCosim,决定于是用离散耦合,还是连续的。
Adams or AdamsCosim depending whether you want to run discrete coupling or continuous export选择AdamsCosim则adams中应该为Discrete。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAMS与AMESim联合仿真
以AMESim作为主软件进行联合仿真。
在ADAMS中建立曲柄滑块机构,将建立的模型导入AMESim中,用AMESim中的液压系统驱动曲柄转动,并绘制滑块的位移曲线。
在创建模型前通过Settings—Interface Style—Classic将界面切换到经典模式。
1、在Adams中建立曲柄滑块机构,如图示:
2、通过Build—System Elements—New创建变量建立状态变量t,x,其中t代表力,x代表滑块的位移;
t作为输入变量,默认为0;x作为输出变量,使用函数DZ(MARKER_12, MARKER_13, MARKER_13),MARKER_12是滑块上的一坐标系,MARKER_13
为ground与滑块建立移动副时产生的ground上的坐标系,其含义是测量MARKER_13到MARKER_12的距离,方向沿MARKER_13的Z轴方向。
3、通过Date Elements—Plant—Plant Input/Plant Output建立输入输出变量,并与状态变量连接起来
4、右击SFORCE_1将力与输入变量连接起来
5、通过Controls—Plant Export将ADAMS模型导出
6、在AMESim中建立液压系统如图示:
通过Modeling—Interface block—Import Adams model,选择工作目录中刚刚生成的inf文件;
完成如下图示的菜单
最终的液压系统如下图示
7、进行联合仿真,注意Print interval的值要小于MSC.Adams output step size 的值
进行联合仿真时如下图示:
8、仿真后的图像如下图示:
ADAMS模型的转矩与滑块位移曲线
液压马达的转矩与转速图像。