行星齿轮传动_CVT机构的参数模型和分析
行星齿轮传动设计详解

1 绪论行星齿轮传动与普通定轴齿轮传动相比较,具有质量小、体积小、传动比大、承载能力大以及传动平稳和传动效率高等优点,这些已被我国越来越多的机械工程技术人员所了解和重视。
由于在各种类型的行星齿轮传动中均有效的利用了功率分流性和输入、输出的同轴性以及合理地采用了内啮合,才使得其具有了上述的许多独特的优点。
行星齿轮传动不仅适用于高速、大功率而且可用于低速、大转矩的机械传动装置上。
它可以用作减速、增速和变速传动,运动的合成和分解,以及其特殊的应用中;这些功用对于现代机械传动发展有着重要意义。
因此,行星齿轮传动在起重运输、工程机械、冶金矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器、和航空航天等工业部门均获得了广泛的应用[1-2]。
1.1 发展概况世界上一些工业发达国家,如日本、德国、英国、美国和俄罗斯等,对行星齿轮传动的应用、生产和研究都十分重视,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。
行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。
然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。
无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。
近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1-8]。
1.2 3K型行星齿轮传动在图4所示的3K型行星齿轮传动中,其基本构件是三个中心轮a、b和e,故其传动类型代号为3K[10]。
在3K型行星传动中,由于其转臂H不承受外力矩的作用,所以,它不是基本构件,而只是用于支承行星轮心轴所必需的结构元件,因而,该转臂H又可称为行星轮支架(简称为行星架)。
自动变速器行星齿轮机构---第三章
2. 功率流分析 规则: (1)一端所受转矩方向与其转速方向相同 (M、n或-M、-n),功 率为正,输入端 (2)一端所受转矩方 向与其转速方向相反 (M、-n或-M、n), 功率为负,输出端 转速(+,-)
三、传动效率 相对功率法: 根据行星排各构件的相对转速、转矩和传递 功率计算。 两点假设: 1. 只计算和相对运动有关的齿轮啮合损失, 其它不计; 2. 相对运动的齿轮啮合损失与定轴传动相同, 外啮合效率0.97,内啮合效率0.98。
2. 档位情况
选档杆 位置 换档执行元件 C1 1 D 2 3 2 L R 1 2 1 倒档 ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ C2 B1 B2 B3 F1 F2 ○ 发动机 制动
档位
P
N
驻车档
空档
○
3. 各档动力传动路线:
1) D1档:C1、F2
主动太阳轮
从动行星架
行星小齿轮
主动齿圈
• 8) 如果所有元件无约束,则动力无法传动 • 空档
太阳轮
行星架
行星小齿轮
主动齿圈
二、车辆传动用行星齿轮机构 1. 单星行星排:一个行星轮同时内外啮合 普通式行星排 复式双联行星排
2. 双星行星排: 两个行星轮 普通式 长短行星轮式 3. 圆锥行星齿轮 行星排 行星架输入动 力,太阳轮输出 对称结构 非对称结构
z
w 3 1 2
实现一个档要结合2-1个
操纵件
如有2个操纵件
可得
C 2
1 z
个档
2. 行星机构速度关系式(数学分析法) 给整个行星机构加反向转速nj,对绝对座标: 行星架转速= nj- nj=0 太阳轮转速= nt- nj 齿圈转速= nq-nj,按定轴传动处理
纯电动汽车两挡行星齿轮自动变速器结构设计

纯电动汽车两挡行星齿轮自动变速器结构设计
我们需要了解行星齿轮自动变速器的基本原理。
行星齿轮系统由太阳齿轮、行星齿轮和载星齿轮组成。
太阳齿轮是由电机驱动的输入轴,行星齿轮与太阳齿轮相连接,并绕着太阳齿轮旋转。
载星齿轮与行星齿轮相连,并且作为输出轴与车轮相连。
通过控制行星齿轮的转动,可以实现不同档位的变速。
在纯电动汽车的两挡行星齿轮自动变速器中,首先需要确定太阳齿轮的大小和齿数。
根据电动车的功率和最大扭矩要求,可以确定太阳齿轮的大小。
然后,根据太阳齿轮和行星齿轮的大小关系,确定行星齿轮和载星齿轮的大小。
接下来,需要选择合适的齿轮比。
齿轮比是指太阳齿轮和行星齿轮之间的齿数比例。
通常情况下,一挡和二挡应具有不同的齿轮比,以提供不同的变速比。
可以通过计算得出合适的齿轮比,使得太阳齿轮和载星齿轮的转速满足所需的变速比。
还需要考虑变速器的控制系统。
变速器的控制系统可以根据驾驶员的需求和车辆的工况来自动调整变速比。
通过感知车辆的加速度、转速和扭矩等参数,控制系统可以实现自动换挡和平稳的变速过程。
还需要考虑变速器的材料选择和制造工艺。
由于纯电动汽车的驱动力较大,变速器的零部件需要选用高强度和耐磨损的材料。
制造工艺也需要考虑到变速器的精度和可靠性要求。
纯电动汽车的两挡行星齿轮自动变速器的结构设计涉及到齿轮大小、齿轮比、控制系统和制造工艺等多个方面。
通过合理的设计和选择,可以实现高效、平稳和可靠的变速性能,提升纯电动汽车的驾驶体验。
行星齿轮传动系统的动力学建模与分析

行星齿轮传动系统的动力学建模与分析齿轮传动系统是一种常见的机械传动形式,由多个齿轮通过啮合传递动力。
在齿轮传动系统中,行星齿轮传动系统是一种常见的结构。
它由中央太阳齿轮、外圈行星齿轮和内圈行星齿轮组成。
行星齿轮传动系统具有紧凑结构、传动比变化范围广和承载能力强的特点,所以在很多机械传动系统中得到广泛应用。
了解行星齿轮传动系统的动力学特性对于设计和优化机械传动系统具有重要意义。
行星齿轮传动系统的动力学建模是研究其特性的基础。
一般而言,行星齿轮传动系统的动力学研究可以分为两个方面:传动系统的静态行为和传动系统的动态行为。
首先,我们来讨论行星齿轮传动系统的静态行为。
行星齿轮传动系统的静态行为主要包括传动比和齿轮位置分析。
传动比决定了输入轴和输出轴的转速比,对于不同的工况要求,传动比的变化范围也是需要考虑的因素。
齿轮位置分析是指确定各个齿轮之间的相对位置,这对于齿轮的啮合是否合理具有重要影响。
在行星齿轮传动系统的静态行为分析中,可以采用几何法和力学法相结合的方法,来求解传动比和齿轮位置。
几何法主要通过几何关系求解,力学法则涉及到力矩平衡和力平衡,求解过程需要考虑到齿轮的几何关系和曲柄等部件的力学特性。
其次,我们来讨论行星齿轮传动系统的动态行为。
行星齿轮传动系统的动态行为主要包括齿轮振动、齿轮动力学和齿轮传动系统的自激振动分析。
齿轮振动是指齿轮在运动过程中由于齿轮的不平衡、啮合刚度等因素引起的振动。
齿轮动力学是指齿轮在运动过程中由于齿轮的载荷和齿轮啮合行为引起的力学现象。
自激振动是指齿轮传动系统由于齿轮的不均匀磨损、齿轮啮合误差等因素引起的自激振动。
行星齿轮传动系统的动态行为分析需要采用系统动力学和振动理论等方法,通过建立数学模型来求解相应的动力学方程。
对于行星齿轮传动系统的动态行为分析,可以分为线性动力学分析和非线性动力学分析。
线性动力学分析是指在小扰动情况下对齿轮传动系统进行的分析,一般求解线性化的动力学方程来得到系统的频率响应和稳定性。
行星齿轮变速装置传动结构实物剖析PPT教案

(2)超速档箱
超速档箱从前至后分别由超速行星排由太阳轮组件、行星架 组件和制动器B0组件组成,离合器C1组件与之相连。
图3-82超速档箱分解图
图3-83超速档箱结构简图和动力传递路线
丰田A43D自动变速器变矩器与齿轮变速装置仿真剖视图
自动变速器壳体前端用螺栓与发动机壳体连接。
大众01M自动变速器前壳体总成从前至后分别由变矩器、 油泵、行星齿轮变速装置和壳体四部分组成。
图3-97 01M行星齿轮变速装置结构简图
2、01M行星齿轮变速装置
(1)制动器B2
B2为湿式多片制动器。B2活塞在油泵壳体内,B2钢片摩 擦片组靠近B2活塞,B2摩擦片内花键与B2毂花键连接, B2钢片外花键与B2鼓(变速器外壳)花键连接,B2传动 套与B2毂、太阳轮壳(与太阳轮一体)均为花键连接。
制动器B1、B2壳体相连,B1B2鼓内均有活塞、钢片摩擦 片、回位弹簧、弹簧座及卡环等。
B1毂与公共太阳轮键连接,B1工作使公共太阳轮制动。
(5)制动器B2与单向离合器F1
B2鼓内有活塞、钢片摩擦片、回位弹簧、弹簧座及卡环等。 B2毂为F1外环,F1内环与公共太阳轮轴颈过度配合。 B2工作使太阳轮单向制动。
(8)输出轴组件
输出轴组件由前齿圈后行星架连成一体,为行星齿轮变速 装置的转矩输出装置。
在输出轴壳体后内后端的后齿圈中心孔内花键通过中间传 动轴的外花键与离合器C1毂相连。
二、拉维奈尔赫式行星齿轮变速装置传动结构 实物剖析
1、大众01M自动变速器总成分解
大众01M自动变速器为发动机横置前驱式,行星齿轮变速装 置装在自动变速器外壳内。
行星齿轮减速器三维结构设计报告

1设计任务电动轮行星齿轮减速器主要包含太阳轮、行星齿轮、行星架、行星轴等关键零件,试进行行星齿轮减速器的零件三维建模设计及装配。
主要参数如表1所示。
图1—图5为参考图。
表1中没有列出的其他参数自行设计确定。
表1 电动轮行星齿轮减速器的齿轮基本参数齿数 模数 mm 齿宽 mm 分度圆直径mm 齿根圆直径mm 齿顶圆直径mm 太阳轮 18 2 21 36 31 40 行星齿轮 36 2 21 72 67 76 内齿圈902211801851762 三维模型制作软件及版本Siemens NX 8.02.1 太阳轮制作利用NX 8 中的GC 工具箱-齿轮建模-圆柱齿轮(如图1),创建齿轮,选择直齿轮,外啮合齿轮,滚齿输入对应数据,输入名称gear_1,模数=2mm ,牙数=18,齿宽=21mm ,压力角=20deg 。
输入后点击确定,矢量类型选择XC 轴,点击确定,获得齿轮(如图2)。
在齿轮其中一端面建立基准平面,再次创建一直齿圆柱齿轮,输入名称gear_3,模数=1.5mm ,牙数=18,齿宽=30mm ,压力角=20deg 。
矢量类型-面平面法向,面选择刚才建立的基准平面。
再在该基准平面内插入草图,以原点(0,0)画圆,与gear_3齿顶圆相切,完成草图,用拉伸功能,选取该圆,拉升方向与齿轮方向一致,高度(毫米)=30 。
利用倒斜角功能,距离选取与gear_3齿根圆相切。
然后利用求交功能,选取gear_3和刚才的圆柱体。
参 数齿 轮在gear_1另一端面建立基准平面,拉伸一个直径(mm)=30,高度(mm)=10的圆柱体,选择倒斜角,距离=3mm,角度=30deg。
得到模型(如图3)。
2.2 行星轮制作如2.1中制作齿轮,创建直齿圆柱齿轮gear_2,模数=2mm,牙数=36,齿宽=21mm,压力角=20deg,矢量类型-两点,随机放置。
其他两个行星齿轮分别为gear_4,gear_5,同样随机放置。
行星齿轮机构的传动原理和结构ppt课件
图3-6齿圈输入,太阳轮制动,行星架输出传动图与结构简图
16
行星齿轮变速装置
2)传动比计算 ①用运动方程计算传动比
该行星齿轮机构运动方程n1+αn2-(1+α)n3=0中,由于 太阳轮制动n1 =0,该方程变为αn2-(1+α)n3=0得n2/n3= (1+α)/α即传动比i=n2/n3 =(1+α)/α>1 即该单排行 星齿轮机构转向相同,减速增矩。
②用矢量图法计算传动比
右 动 似图,三为齿角行 圈 形CR星输原1 架出理输矢,n入量可3 ,图以太。计CR阳根算1轮据出n制相传n32 α α 动比i= n3/n2
=α/(1+α)<1 即该单排
行 减星矩齿。轮S机构n转1向相同S、增速
R n2 1 n3 C α
S
R
1
C n3 α
S
21
Байду номын сангаас
行星齿轮变速装置
行星轮即可绕行星轴自 转,又可绕太阳轮公转。 太阳轮与行星轮是外啮合, 二者旋转方向相反;行星 轮与齿圈是内啮合,二者 旋转方向相同。行星齿轮 系统的齿轮均采用斜齿常 啮合状态
5
行星齿轮变速装置 单排单级行星齿轮机构运动
6
行星齿轮变速装置 单排单级行星齿轮机构组成
7
行星齿轮变速装置 单排单级行星齿轮机构实物运动
行星齿轮变速装置
2)传动比计算 ①用运动方程计算传动比
该行星齿轮机构运动方程n1+αn2-(1+α)n3=0中,由于 太阳轮制动n1=0,该方程变为αn2-(1+α)n3=0 得 n3/n2=α/(1+α)传动比i= n3/n2=α/(1+α)<1 即该单排 行星齿轮机构转向相同、增速减矩。
汽车知识CVT机械系统广汽本田内部教程
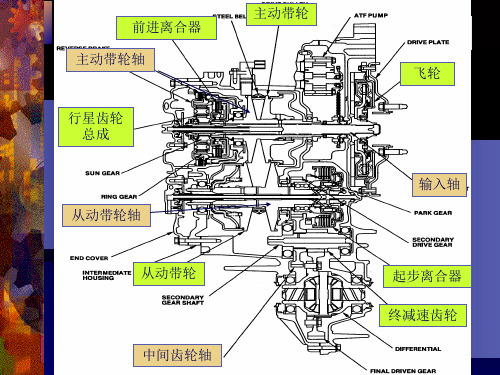
起步离合器
润滑
CVT机械系统
大流量润滑液 体通孔
驻车锁止机构
结构 作动原理
驻车止动爪 驻车齿轮
CVT机械系统
驻车制动杆 驻车制动杆往上推, 由于锥面的作用,驻 车止动爪与驻车齿轮 啮合,驻车齿轮固定
动力传递路线
P档
倒档制动器
起步离合器别离
前进离合器别离
倒档制动器别离
前进离合器
中间主动齿轮被
前进离合器别离
倒档制动器接合太阳轮
起步离合器接合
主动带轮 从动带轮轴
输入轴
从动带轮
起步离合器
动画演示
中间传动齿轮
差速器
锁定
N档
起步离合器别离
前进离合器别离
CVT机械系统
起步离合器
动力传递路线
D、S、L档 前进离合器接合 倒档制动器别离 太阳轮 起步离合器接合前进离合器
CVT机械系统
主动带轮
输入轴
从动带轮轴 从动带轮
起步离合器
动画演示
中间传动齿轮
差速器
动力传递路线
CVT机械系统
R档
倒档制动器
行星齿轮
CVT机械系统
前进离合器
倒档制动器
结构
功能
通过液压作用锁止 行星架,实现倒车
CVT机械系统
倒档制动器 弹簧
倒档制动器 活塞
CVT机械系统
前进/倒车档切换
前进档
太阳轮与齿圈啮合 动力传递
输入轴-太阳轮-前进档离合器-主动带轮轴- 主动带轮
CVT机械系统
前进/倒车档切换
倒车档
倒档制动器啮合,行星齿轮架锁止 动力传递
前进离合器
主动带轮
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
行星齿轮传动2CV T 机构的参数模型和分析Param etr ic M odeli ng and Analysis of A planetaryGear -CVT M echan is mV ictor H .M ucino 3J am es E .Sm ith3B en Co w an 33M a rek Km icik ie w icz33[摘要]本文研究行星齿轮传动和无级变速器(CV T )综合功能,用太阳轮和齿圈与可变节距的带轮相连接形成一个循环功率控制元件。
该机构简单,工作时不需离合器。
参数方法是用一个数学模型去完成参数灵敏度分析。
优化过程的一个特徵参数是系统最有影响的参数和功能比,以它为基础去估算可变传动和功率控制元件。
用三种不同的传动比和二个独立设计参数可完全确定系统的结构。
这些是:行星齿轮系速比(F g )、CV T 传动速比(F c )和控制输出齿轮速比(F gc )。
二个独立参数是:a ,行星轮转臂、太阳轮、内齿圈和b ,控制齿圈和输出齿轮其中之一的半径。
[ABSTRACT ] T he m echan is m con sidered here ,com b ines the functi on s of a p lanetary g ′ear train and acon tinuou sly variab le tran s m issi on (CV T )system ,th rough a circu lating pow er con tro l un it ,w h ich resu lts by connecting the sun 2gear shaft and the ring 2gear ro tati on th rough a variab le p itch pu lley system .T he m echan is m is si m p le and does no t requ ire clu tches fo r its operati on .A param etric app roach is u sed to generate a model that can be u sed to perfo rm param etric sen sitivity analysis .In the op ti m izati on p rocess ,a param etric characterizati on is m ade based on the mo st sign ifican t param eters and functi onal rati o s of the system to evaluate the perfo rm ance of the variab le tran s m issi on and pow er con tro l un it .T h ree differen t tran s m issi on rati o s and tw o independen t design param eters fu lly define the configu rati on of the system .T hese are :the p lanetary gear train rati o (F g ),the CV T tran s m issi on rati o (F c ),and the con tro l to ou tpu t gear rati o (F gc ).T he tw o independen t param eters can be selected from the radii of tw o group s of elem en ts (one from each ),that include a )the p lanetary gear carrier ,the sun gear ,the in ternal ring gear and b )the con tro l ring gear ,and the ou tpu t gear . 关键词:行星传动 无级变速器CV T 参数模型 功率分流 功率反馈 Key w o rds :p lanetary gear train con tinuou sly variab le tran s m issi on CV T Param etric modelingpow er sp lit Pow er 2Feedback3W est V irginia U niv .33CK Engineering引言行星齿轮机构和无级变速箱的综合已有很多成功的应用实例,本文仅述及由行星齿轮系和CV T 直接组合提供变速的传动装置。
这两个主要部件(行星传动和CV T )的综合特性是不要求采用离合器和链传动,这种的机构的三种主要结构简称为“行星2CV T ”,一般布置为二个功率反馈和一个功率分流。
本文研究的系统如图1所示,按其特徵参数确I n troductionP lanetary gear train m echan is m s and con tinu 2ou sly variab le tran s m issi on s have been u sed suc 2cessfu lly in m any types of app licati on s .T he m echa 2n is m p resen ted in th is paper u ses on ly a p lanetary gear train system and a CV T un it directly connect 2ed to p rovide a variab le tran s m issi on un it .T he com b ined featu res of the tw o m ain componen ts (p lanetray and CV T )do no t requ ire the u se of clu 2图1 ‘功率反馈’行星传动2CV T机构结构F ig.1 P lanetary2CV T m echan is m configu rati on fo r‘Pow el2Feedback’r p-行星齿轮节径rediu s of the p lanet gear;r a-转臂半径radiu s of the arm carrier;r s-太阳轮节径radiu s of the sun gear;r ri-内齿圈节径radiu s of the in ternal ring gear;r r-外齿圈节径radiu s of the ex ternal ring gear;r0-输出轴齿轮节径radiu s of the ou tpu t shaft gear;r I2CV T滑轮外径ou ter radiu s of the CV T pu llery;r c-行星带轮节径p itch radiu s of p lanet sheave;r2-输出带轮节径p itch ra2 diu s of ou tpu t sheave定总的几何外形动。
三个重要的传动比是:1,行星齿轮传动比F g,该传动比确定于太阳轮节径与内齿圈节径之比;2,无级变速速比F c,该传动比确定于CV T主、从动滑轮的节径比;3,控制齿圈与输出齿轮比F gc,该传动比确定于输出齿轮节径与外圈(控制齿轮)半径之比。
一般行星齿轮传动有三个主要转动件(行星架,太阳轮和内齿圈),具有二个自由度。
应给定二个转动件的运动来确定第三构件的运动。
其图解实例见图2。
太阳轮轴用一惰轮与输出齿轮相连,同时输出轴用固连于行星传动圈齿轮直接与行星传动相连。
这样的安排就减少了一个自由度。
所以输入连杆足以确定所有构件的运动,输出运动可以或者由太阳轮或者由中间轴直接确定。
现在,如果太阳轮轴和输出轴之间连接惰轮由CV T的一个滑轮代替,将形成图1所示的变速比机构。
带入系统的一个附加自由度可控制获得输入和输出予期规定的速比。
这是一个运动自由度和一个控制自由度造成的结果。
tches and chaindrives.T h ree m ain configu rati on s of th is m echan is m dubbed si m p ly“P lanetary2 CV T”,are p resen ted in tw o pow er feedback and one pow er sp lit fo rw ard general arrangem en ts.T he system con sidered here is dep icted in F ig. 1,along w ith the characteristic param eters w h ich define the overall geom etric configu rati on.T h ree rati o s of in terest are:1)the p lanetary gear train rati o(Fg),defined as the rati o of the sun gear p itch radiu s to the in ternal ring gear p itch radiu s,2)the con tinuou sly variab le tran s m issi on rati o(Fc),de2 fined as the effective p itch radii rati o of the CV T sheaves and3)the con tro l ring gear to ou tpu t gear rati o(Fgc),defined as the rati o of the ou tpu t gear p itch radiu s to the ou ter ring(con tro l gear)radiu s.Generally,a p lanetary gear train has th ree m ain ro tating elem en ts(p lanet gear carrier,sun gear and the in ternal ring gear)w ith tw o k inem atic degrees of freedom.P rescribed mo ti on s fo r tw o of the ro tating elem en ts are requ ired to determ ine the mo ti on of the th ird elem en t.In system s con tain ing a con tro l un it,one of the p rescribed mo ti on s is m ade dependen t on the first one by m ean s of con2 necting elem en ts,fo r examp le in the system show n schem atically in F ig.2,the sun gear shaft connects to the ou tpu t gear shaft by m ean s of an idler gear, w h ile the ou tpu t shaft is directly connected to the p lanetary gear train by m ean s of an ou tpu t gear and a con tro l gear so lidly attached to the p lanetary ring gear.T h is arrangem en t reduces one k inem atic de2 gree of freedom,so that the mo ti on of the inpu t link is sufficien t to define the mo ti on of all the ro2 tating componen ts.It shou ld be no ted that the ou t2 pu t mo ti on can be taken directly from either the sun gear shaft o r the coun tershaft.N ow,if the idler gear connecti on betw een the sun gear shaft and the ou tpu t shaft is rep laced by a CV T pu lley un it,the resu lting m echan is m yields a variab le speed rati o as the one show n in F ig.1.A n additi onal degree of freedom is b rough t in to the system w h ich allow s con tro l to be exerted on the p rescribed velocity ra2 ti o betw een the inpu t and ou tpu t shafts p revi ou sly indicated.T he resu lt is a m echan is m w ith one k ine2 m atic degree of freedom and one con tro l degree of freedom.图2 带有‘功率反馈’和固定速比的行星齿轮传动F ig.2 P lanetary gear train system w ith‘Pow er2Feedback’and fixed speed rati o 数字模型的描述行星传动的运动特性公式可以如下述公式用角速度来表示:W Ia W fa=(W I-W a) (W f-W a)(1) 式中W Ia-相对转臂的“末”齿轮角速度;W f a是相对转臂的“首”齿轮的角速度,W I、W f和W a分别是‘末’和‘首’齿轮以及转臂的绝对角速度。