Worksheet Points, Lines and Planes
工程图学 第一章

1.8 标注尺寸的基本方法 Basic Dimensioning 1.9 圆形和角形的尺寸标注 Dimensioning in Limited 1.10 狭小地位中的尺寸注法 Dimensioning in Limited Space 1.11 视图 View 1.12 徒手绘图 Freehand Drawing
背景音乐
返回总目录
本章目录
上一页 下一页
1.5 字体 LETTERING 字体号数 (The sizes of characters): 20,14,10, 7,5,2.5, 1.8.
字体号数是用字体的 高度 h(单位mm)来 表示的.
斜体 Italic
B型 Type B
斜体 Italic
A型 Type B
细点画线 Thin dot-and-dash line
轨迹线 Locus lines
6.3
粗点画线 Thick dot-and-dash line
有特殊要求的线或表面 的表示线 Indication of lines or surfaces with special requirements
7.1
The scale is the ratio between the dimensions of the drawing of an object and the actual dimensions.
表TABLE 1.3
注:必要时,允许选取括号中的比例。 Note: It is permissible to choose the scales shown in brackets, if necessary.
A1 A0
A3 A4
A2
背景音乐
Point, Line, Plane

P o i n t s,l i n e s,a n d p l a n e sIn what follows are various notes and algorithms dealing with points, lines, and planes.M i n i m u m D i s t a n c e b e t w e e na P o i n t a n d a L i n eWritten by Paul BourkeOctober 1988This note describes the technique and gives the solution to finding the shortest distance from a point to a line or line segment. The equation of a line defined through two points P1 (x1,y1) and P2 (x2,y2) isP = P1 + u (P2 - P1)The point P3 (x3,y3) is closest to the line at the tangent to the line which passes through P3, that is, the dot product of the tangent and line is 0, thus(P3 - P) dot (P2 - P1) = 0Substituting the equation of the line gives[P3 - P1 - u(P2 - P1)] dot (P2 - P1) = 0Solving this gives the value of uSubstituting this into the equation of the line gives the point of intersection (x,y) of the tangent asx = x1 + u (x2 - x1)y = y1 + u (y2 - y1)The distance therefore between the point P3 and the line is the distance between (x,y) above and P3.NotesThe only special testing for a software implementation is to ensure that P1 and P2 are not coincident (denominator in the equation for u is 0)If the distance of the point to a line segment is required then it is only necessary to test that u lies between 0 and 1.The solution is similar in higher dimensions.Source code contributionsC source from Damian Coventry: C source codeVBA from Brandon Crosby: VBA source codeDephi from Graham O'Brien: Delphi version"R" version from Gregoire Thomas: pointline.rJA V A version from Pieter Iserbyt: DistancePoint.javaLabView implementation from Chris Dancer: Pointlinesegment.vi.zipRight side distance by Orion Elenzil: rightsideVBA VB6 by Thomas Ludewig: vbavb6.txtM i n i m u m D i s t a n c e b e t w e e na P o i n t a n d a P l a n eWritten by Paul BourkeMarch 1996Let P a = (x a, y a, z a) be the point in question.A plane can be defined by its normal n = (A, B, C) and any point on the plane P b = (x b, y b, z b)Any point P = (x,y,z) lies on the plane if it satisfies the followingA x +B y +C z +D = 0The minimum distance between P a and the plane is given by the absolute value of(A x a + B y a + C z a + D) / sqrt(A2 + B2 + C2). . . 1To derive this result consider the projection of the line (P a - P b) onto the normal of the plane n, that is just ||P a - P b||cos(theta), where theta is the angle between (P a - P b) and the normal n. This projection is the minimum distance of P a to the plane.This can be written in terms of the dot product asminimum distance = (P a - P b) dot n / ||n||That isminimum distance = (A (x a - x b) + B (y a - y b) + C (z a - z b)) / sqrt(A2 + B2 + C2). . . 2 Since point (x b, y b, z b) is a point on the planeA x b +B y b +C z b +D = 0. . . 3 Substituting equation 3 into equation 2 gives the result shown in equation 1.I n t e r s e c t i o n p o i n t o f t w o l i n e s e g m e n t s i n2d i me n s i o n sWritten by Paul BourkeApril 1989This note describes the technique and algorithm for determining the intersection point of two lines (or line segments) in 2 dimensions.The equations of the lines areP a = P1 + u a ( P2 - P1 )P b = P3 + u b ( P4 - P3 )Solving for the point where P a = P b gives the following two equations in two unknowns (u a and u b)x1 + u a (x2 - x1) = x3 + u b (x4 - x3)andy1 + u a (y2 - y1) = y3 + u b (y4 - y3)Solving gives the following expressions for u a and u bSubstituting either of these into the corresponding equation for the line gives the intersection point. For example the intersection point (x,y) isx = x1 + u a (x2 - x1)y = y1 + u a (y2 - y1)Notes:The denominators for the equations for u a and u b are the same.If the denominator for the equations for u a and u b is 0 then the two lines are parallel.If the denominator and numerator for the equations for u a and u b are 0 then the two lines are coincident.The equations apply to lines, if the intersection of line segments is required then it is only necessary to test if u a and u b lie between 0 and 1. Whichever one lies within that range then the corresponding line segment contains theintersection point. If both lie within the range of 0 to 1 then the intersection point is within both line segments.Source code contributionsOriginal C code by Paul Bourke.C++ contribution by Damian Coventry.LISP implementation by Paul Reiners.C version for Rockbox firmware by Karl Kurbjun.C# version by Olaf Rabbachin. version by Olaf Rabbachin.VBA implementation by Giuseppe Iaria.Javascript version by Leo Bottaro.T h e s h o r t e s t l i n e b e t w e e n t w o l i n e s i n3DWritten by Paul BourkeApril 1998Two lines in 3 dimensions generally don't intersect at a point, they may be parallel (no intersections) or they may be coincident (infinite intersections) but most often only their projection onto a plane intersect.. When they don't exactly intersect at a point they can be connected by a line segment, the shortest line segment is unique and is often considered to be their intersection in 3D.The following will show how to compute this shortest linesegment that joins two lines in 3D, it will as a bi-productidentify parallel lines. In what follows a line will be definedby two points lying on it, a point on line "a" defined by pointsP1 and P2 has an equation.P a = P1 + mu a (P2 - P1)similarly a point on a second line "b" defined by points P4and P4 will be written asP b = P3 + mu b (P4 - P3)The values of mu a and mu b range from negative to positiveinfinity. The line segments between P1P2and P3P4havetheir corresponding mu between 0 and 1.There are two approaches to finding the shortest line segment between lines "a" and "b". The first is to write down the length of the line segment joining the two lines and then find the minimum. That is, minimise the following|| P b - P a ||2Substituting the equations of the lines gives|| P1 - P3 + mu a (P2 - P1) - mu b (P4 - P3) ||2The above can then be expanded out in the (x,y,z) components. There are conditions to be met at the minimum, the derivative with respect to mu a and mu b must be zero. Note: it is easy to convince oneself that the above function only has one minima and no other minima or maxima. These two equations can then be solved for mu a and mu b, the actual intersection points found by substituting the values of mu into the original equations of the line.An alternative approach but one that gives the exact same equations is to realise that the shortest line segment between the two lines will be perpendicular to the two lines. This allows us to write two equations for the dot product as(P a - P b) dot (P2 - P1) = 0(P a - P b) dot (P4 - P3) = 0Expanding these given the equation of the lines( P1 - P3 + mu a (P2 - P1) - mu b (P4 - P3) ) dot (P2 - P1) = 0( P1 - P3 + mu a (P2 - P1) - mu b (P4 - P3) ) dot (P4 - P3) = 0Expanding these in terms of the coordinates (x,y,z) is a nightmare but the result is as followsd1321 + mu a d2121 - mu b d4321 = 0d1343 + mu a d4321 - mu b d4343 = 0whered mnop = (x m - x n)(x o - x p) + (y m - y n)(y o - y p) + (z m - z n)(z o - z p)Note that d mnop = d opmnFinally, solving for mu a givesmu a = ( d1343 d4321 - d1321 d4343 ) / ( d2121 d4343 - d4321 d4321 )and back-substituting gives mu bmu b = ( d1343 + mu a d4321 ) / d4343Source code contributionsOriginal C source code from the author: lineline.cContribution by Dan Wills in MEL (Maya Embedded Language): source.mel.A Matlab version by Cristian Dima: linelineintersect.m.A Maxscript function by Chris Johnson: LineLineIntersect.msLISP version for AutoCAD (and Intellicad) by Andrew Bennett: int1.lsp and int2.lspA contribution by Bruce Vaughan in the form of a Python script for the SDS/2 design software: L3D.pyC# version by Ronald Holthuizen: calclineline.csVBA VB6 version by Thomas Ludewig: vbavb6.txtLabView implementation by John van Schaijk: V01_LineLine3D.vi.zipI n t e r s e c t i o n o f a p l a n e a n d a l i n eWritten by Paul BourkeAugust 1991Contribution by Bryan Hanson: Implementation in RThis note will illustrate the algorithm for finding the intersection of a line and a plane using two possible formulations for a plane.Solution 1The equation of a plane (points P are on the plane with normal N and point P3 on the plane) can be written asN dot (P - P3) = 0The equation of the line (points P on the line passing through points P1 and P2) can be written asP = P1 + u (P2 - P1)The intersection of these two occurs whenN dot (P1 + u (P2 - P1)) = N dot P3Solving for u givesNoteIf the denominator is 0 then the normal to the plane is perpendicular to the line. Thus the line is either parallel to the plane and there are no solutions or the line is on the plane in which case there are an infinite number of solutionsIf it is necessary to determine the intersection of the line segment between P1 and P2 then just check that u isbetween 0 and 1.Solution 2A plane can also be represented by the equationA x +B y +C z +D = 0where all points (x,y,z) lie on the plane.Substituting in the equation of the line through points P1 (x1,y1,z1) and P2 (x2,y2,z2)P = P1 + u (P2 - P1)givesA (x1 + u (x2 - x1)) +B (y1 + u (y2 - y1)) +C (z1 + u (z2 - z1)) +D = 0Solving for uNotethe denominator is 0 then the normal to the plane is perpendicular to the line. Thus the line is either parallel to the plane and there are no solutions or the line is on the plane in which case are infinite solutionsif it is necessary to determine the intersection of the line segment between P1 and P2 then just check that u isbetween 0 and 1.E q u a t i o n o f a p l a n eWritten by Paul BourkeMarch 1989The standard equation of a plane in 3 space isAx + By + Cz + D = 0The normal to the plane is the vector (A,B,C).Given three points in space (x1,y1,z1), (x2,y2,z2), (x3,y3,z3) the equation of the plane through these points is given by the following determinants.Expanding the above givesA = y1 (z2 - z3) + y2 (z3 - z1) + y3 (z1 - z2)B = z1 (x2 - x3) + z2 (x3 - x1) + z3 (x1 - x2)C = x1 (y2 - y3) + x2 (y3 - y1) + x3 (y1 - y2)- D = x1 (y2 z3 - y3 z2) + x2 (y3 z1 - y1 z3) + x3 (y1 z2 - y2 z1)Note that if the points are collinear then the normal (A,B,C) as calculated above will be (0,0,0).The sign of s = Ax + By + Cz + D determines which side the point (x,y,z) lies with respect to the plane. If s > 0 then the point lies on the same side as the normal (A,B,C). If s < 0 then it lies on the opposite side, if s = 0 then the point (x,y,z) lies on the plane.AlternativelyIf vector N is the normal to the plane then all points p on the plane satisfy the followingN . p = kwhere . is the dot product between the two vectors.ie: a . b = (a x,a y,a z) . (b x,b y,b z) = a x b x + a y b y + a z b zGiven any point a on the planeN . (p - a) = 0T h e i n t e r s e c t i o n o f t w o p l a n e sWritten by Paul BourkeFebruary 2000The intersection of two planes (if they are not parallel) is a line.Define the two planes with normals N asN1 . p = d1N2 . p = d2The equation of the line can be written asp = c1N1 + c2N2 + u N1 * N2Where "*" is the cross product, "." is the dot product, and u is the parameter of the line.Taking the dot product of the above with each normal gives two equations with unknowns c1 and c2.N1 . p = d1 = c1N1 . N1 + c2N1 . N2N2 . p = d2 = c1N1 . N2 + c2N2 . N2Solving for c1 and c2c1 = ( d1N2 . N2 - d2N1 . N2 ) / determinantc2 = ( d2N1 . N1 - d1N1 . N2) / determinantdeterminant = ( N1 . N1 ) ( N2 . N2 ) - ( N1 . N2 )2Note that a test should first be performed to check that the planes aren't parallel or coincident (also parallel), this is most easily achieved by checking that the cross product of the two normals isn't zero. The planes are parallel ifN1 * N2 = 0I n t e r s e c t i o n o f t h r e e p l a n e sWritten by Paul BourkeOctober 2001A contribution by Bruce Vaughan in the form of a Python script for the SDS/2 design software: P3D.py.The intersection of three planes is either a point, a line, or there is no intersection (any two of the planes are parallel).The three planes can be written asN1 . p = d1N2 . p = d2N3 . p = d3In the above and what follows, "." signifies the dot product and "*" is the cross product. The intersection point P is given by:d1 ( N2 * N3 ) + d2 ( N3 * N1 ) + d3 ( N1 * N2 )P =-------------------------------------------------------------------------N1 . ( N2 * N3 )The denominator is zero if N2 * N3 = 0, in other words the planes are parallel. Or if N1 is a linear combination of N2 and N3.E q u a t i o n o f a l i n e i n p o l a r c o o r d i n a t e sWritten by Paul BourkeMarch 2013How might one represent a line in polar coordinates?In Cartesian coordinates it can be represented as:The derivation is quite straightforward once one realises that for a point (r, theta) the x axis is simply r cos(theta) and the y axis is r sin(theta). Substituting those into the equation for the line gives the following result.Example from the Graphing Calculator.Question2020/4/20Point, Line, Plane/geometry/pointlineplane/11/11Given a line defined by two points L1 L2, a point P1 and angle z (bearing from north) find the intersection point between the direction vector from P1 to the line.Short answer: choose a second point P2 along the direction vector from P1, say P2 = (x P1+sin(z),y P1+cos(z)). Apply the algorthm here for the intersection of two line segments . Perform the additional test that u b must be greater than 0, the solution where u b is less than 0 is the solution in the direction z+180 degrees.。
平面几何知识点总结大全

平面几何知识点总结大全Title: Comprehensive Summary of Planar Geometry Knowledge PointsTitle: 平面几何知识点总结大全Section 1: Points, Lines, and PlanesIn planar geometry, points are the simplest entities, representing a location in space.A line is formed by two distinct points, and it extends infinitely in both directions.A plane, on the other hand, is a two-dimensional surface that extends infinitely in all directions.第一部分:点、线、面在平面几何中,点是最简单的实体,表示空间中的一个位置。
线由两个不同的点组成,并且向两个方向无限延伸。
另一方面,面是一个二维表面,在所有方向上都无限延伸。
Section 2: Segments and RaysA line segment is a part of a line that is bounded by two points.It has a definite length.A ray is a part of a line that has one endpoint and extends indefinitely in one direction.第二部分:线段和射线线段是线的一个部分,由两个点限定,它有一个确定的长度。
射线是线的一个部分,有一个端点,并且在其中一个方向上无限延伸。
Section 3: Parallel Lines and TransversalsParallel lines are lines that never intersect, no matter how far they are extended.Transversals are lines that intersect two or more parallel lines, and they create corresponding angles and alternate interior angles.第三部分:平行线和横截线平行线是永远不会相交的线,无论它们延伸多远。
AMC8词汇大全
有准备准备参加美国数学竞赛AMC8的小伙伴们吗,对于竞赛中必备的单词大家都掌握了吗?没有的话感觉去记下来然后去背单词吧!一、Arithmetic算术1、Factors and multiples因数和倍数factor 因数common multiple公倍数factorize因式分解least common multiple(LCM)最小公倍数prime factorization分解质因数remainder余数common factor公因数divisible能够被整除的greatest common factor(GCF)最大公因数prime 质数multiple倍数composite number合数2、 Real number实数integer整数units digit个位whole number自然数tens digit十位odd奇数value数值even 偶数axis数轴( pI. axes)non-zero非零的sign/symbol符号positive 正的order顺序positive number正数arrange排列negative负的ascending/increasing order升序negative number负数descending order降序digit数位,数字3、approximation 近似数approximate近似的place value位值approximation 近似数exact value 准确值estimate估算decimal place 小数位estimation估算值hundreds place 百分位round(off)四舍五入thousands place 千分位round up五入significant figure有效数round down四舍4. Ratios and percentage比与百分数ratio 比average speed平均速度simplify化简convert转换equivalent等价的conversion of units单位换算rate比率percentage百分数distance路程discount折扣5. Units of measurement度量单位transformation转换kilo 1000 centi 0.01 milli0.001length长度kilometer(km)千米Inch 英寸meter米foot英尺( pl. feet)centimeter(cm)厘米yard码millimeter(mm)毫米mile 英里1foot=12 inches 1yard=3feet 1mile=1.6 kilometer weight(mass)重量(质量)kilogram(kg)千克milligram(mm)毫克gram(g)克pound磅1pound=453.6gramscapacity( volume)容量(体积)liter(L)升milliliter(ml)毫升centiliter(cl)厘升gallon加仑1 gallon=3. 79litersCurrency货币penny 一便土cent美分nickel五分硬币dollar二元dime一角硬币pound 英镑quarter 25分硬币1 dollar=100 cents1dollar-4 quarters 1quarter= 25 pennies 1 dime=10 pennies1 nickel=5 penniestime时间second 秒hour 小时minute分钟1 hour=60 minutes1minute=60 seconds二、Algebra代数1、Algebra Operation代数运算add加quotient 商sum 和evaluate/calculate计算subtract减simplify化简difference差expand展开multiple乘index/power/exponent指数product乘积reverse 逆向的divide除reciprocal倒数2. Equation and Inequality方程与不等式equation方程inequality不等式solve 解constant常数greater than大于less than小于not greater than 小于或等于no less than大于或等于3、Coordinate System and Function坐标系与函数coordinate system坐标系coordinate坐杉origin原点intercept截距gradient斜率horizontalaxis/x-axis横轴verticalaxis/y-axis竖轴ordered pair有序数对quadrant象限function函数三、 Statistics统计1、Sequences数列sequence数列arithmeticsequence 等差数列geometric sequence等比数列common difference公差common ratio公比general term通项2、set集合set集合element元素subset子集union 并集intersection交集3. Statistics and Probability统计与概率statistics统计data数据row 行column列rank 排名maximum最大值minimum 最小值average平均mean平均数median 中位数mode 众数range极差mid-range 极值的平均值probability概率coin硬币head硬币正面tail硬币反面fair均匀的chip 筹码dice/die骰子四、 Geometry几何1、Points, Lines and planes点、线、面point点segment线段ray射线bisector平分线line线curve曲线plane平面side边(平面)edge棱(立体)surface表面diagonal对角线base底altitude高intersection交点midpoint中点interval间距region区域shade阴影bold加粗arrow箭头2、 Angles and position relations角和位置关系angle角acute angle锐角right angle直角obtuse angle钝角degree度数vertex顶点center中心parallel 平行perpendicular垂直inscribe内接circumscribe 外接Intersect相交tangent相切symmetry对称bisect平分trisect三等分3. Triangle三角形triangle三角形equilateral等边的isosceles 等腰的similar相似congruent 全等leg 直角边hypotenuse斜边adjacent side邻边opposite side对边4. Quadrilateral四边形quadrilateral四边形rhombus菱形rectangular矩形parallelogram平行四边形trapezoid梯形square正方形5. Polygon多边形polygon多边形pentagon五边形hexagon六边形octagon八边形equal相等equiangular等角identical完全相同的regular正的(用于正多边形)6. Circle圆circle圆形semicircle半圆radius半径diameter直径circumference圆周sector扇形chord弦7. Solid立体solid立体cube正方体cubic立方的wedge楔形sphere球体8. Measure度量measure度量area 面积volume 体积perimeter周长length长度wide宽度height高度time时间speed/rate 速度distance距离mileage里程clockwise顺时counterclockwise逆时针rotation旋转reflection翻转五、 noun and adjective名词和形容词grid网格graph图表diagram图表arrangement安排score 分数parenthesis圆括号discount折扣reverse逆向distinct不同的constant恒定的random随机的consecutive连续的respectively相对应的additional多余的adjacent相邻的simultaneously同时地congruent相同的(表示数字之间)inclusive 包含两端的学通国际课程培训中心自2008年起一直致力于ALEVEL、IGCSE、IB、AP、SAT2等主流国际课程中30多门科目的提分与培优,经11年深耕教学,目前已拥有教师团队80余人,其中20%为博士,80%为名校海归硕士,平均国际课程教龄8年以上,每年为学生提供50000小时以上的高品质课程。
point, line, plane
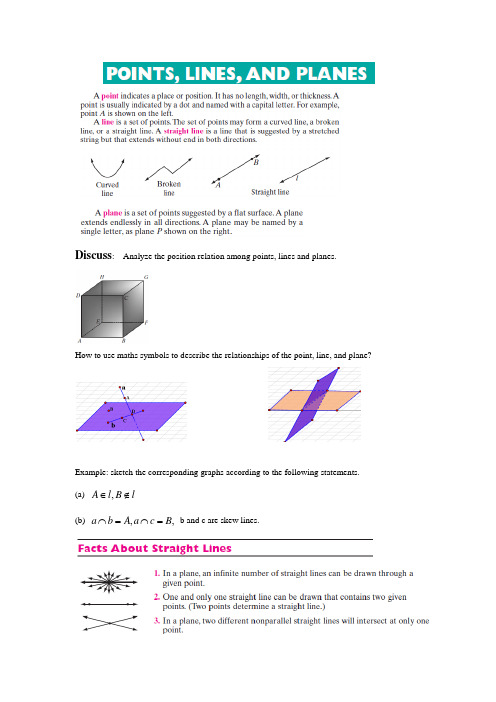
Discuss : Analyze the position relation among points, lines and planes.How to use maths symbols to describe the relationships of the point, line, and plane?_________________________________ ______________________________ Example: sketch the corresponding graphs according to the following statements.(a) l B l A ∉∈,(b) ,,B c a A b a =⋂=⋂ b and c are skew lines.例1:请判断下列陈述是否正确?(1)如果一条直线上的两点在一个平面内,那么这条直线上的所有点都在这个平面内。
(2)经过不在同一条直线上的三点,有且只有一个平面。
(3)如果不重合的两个平面有一个公共点,那么它们有且只有一条过这个点的公共直线。
(4)经过一条直线和直线外的一点,有且只有一个平面。
(5)经过两条相交直线,有且只有一个平面。
(6)经过两条平行直线,有且只有一个平面。
(7)过一条直线的平面有无数多个。
(8)如果线段AB在平面α内,那么直线AB在平面α内。
(9)两个平面的公共点的集合,可能是一条线段。
(10)两个相交平面存在不在一条直线上的三个公共点。
(11)三角形、四边形、梯形、球都是平面图形。
(12)两个平面能把空间分成3个部分。
(13)不共线的四点确定一个平面。
自主学习:空间几何体内容:制作一张海报,内容二选一,为“棱柱、棱锥和棱台的结构特征+圆柱、圆锥、圆台和球的结构特征展示”形式:每4人一组,合作完成。
评估方式:展示+介绍,其它组综合打分,满分5分,计入期末总分。
要求:1. 陈述这几类几何体独特的特征性质;2. 画出对应的几何体立体图形(斜几何体均可以),可以尺子作图、软件作图打印粘贴或制作立体实物模型。
空间解析几何与向量代数课程思政

空间解析几何与向量代数课程思政1.空间解析几何与向量代数是一门重要的数学课程。
Space analytic geometry and vector algebra is an important mathematics course.2.通过学习这门课程,我们能更好地理解空间中的几何关系。
By studying this course, we can better understand the geometric relationships in space.3.向量代数是一种描述空间中方向和大小的数学工具。
Vector algebra is a mathematical tool for describing direction and magnitude in space.4.我们通过向量代数可以计算空间中的距离和角度。
We can calculate distances and angles in space through vector algebra.5.空间解析几何与向量代数在工程、物理学和计算机科学中有着广泛的应用。
Space analytic geometry and vector algebra are widely used in engineering, physics, and computer science.6.这门课程的内容包括空间中的点、直线、平面以及它们之间的关系。
The content of this course includes points, lines, planes in space and their relationships.7.我们将学习如何用向量表示和计算空间中的几何对象。
We will learn how to use vectors to represent and calculate geometric objects in space.8.向量的运算是这门课程的核心内容之一。
几何英语知识点归纳总结
几何英语知识点归纳总结In this article, we will delve into the key concepts and principles of geometry, covering a wide range of topics from basic shapes to advanced theorems. By the end of this article, you will have a comprehensive understanding of geometry and be able to apply its principles to solve a variety of problems.Basic Concepts in Geometry1. Points, Lines, and Planes: The foundation of geometry lies in the ideas of points, lines, and planes. A point is a location in space, represented by a dot. A line is a straight path that extends in both directions infinitely, with no width or thickness. A plane is a flat, two-dimensional surface that extends infinitely in all directions.2. Angles: An angle is formed when two rays share a common endpoint, referred to as the vertex. Angles are measured in degrees, with a full circle representing 360 degrees. There are different types of angles, including acute angles (less than 90 degrees), obtuse angles (greater than 90 degrees), right angles (exactly 90 degrees), straight angles (exactly 180 degrees), and reflex angles (greater than 180 degrees).3. Polygons: A polygon is a closed shape made up of straight line segments. The most common types of polygons are triangles (3 sides), quadrilaterals (4 sides), pentagons (5 sides), hexagons (6 sides), and so on. Polygons can be classified based on the number of sides and angles they have.4. Circles: A circle is a set of all points in a plane that are equidistant from a given center point. The distance from the center to any point on the circle is called the radius, and the distance across the circle through the center is called the diameter. The ratio of the circumference of a circle to its diameter is a constant value known as pi (π), approximately equal to 3.14159.5. Similarity and Congruence: Two geometric figures are similar if they have the same shape but different sizes. They are congruent if they have the same shape and size. These concepts are fundamental in understanding the relationships between different geometric figures.6. Perimeter and Area: The perimeter of a shape is the distance around its boundary, while the area is the measure of the space inside the boundary. Different formulas are used to calculate the perimeter and area of various shapes, such as rectangles, triangles, circles, and so on.Advanced Concepts in Geometry1. Pythagorean Theorem: This theorem states that in a right-angled triangle, the square of the length of the hypotenuse (the side opposite the right angle) is equal to the sum of the squares of the lengths of the other two sides. It is expressed as a^2 + b^2 = c^2, where a and b are the lengths of the two shorter sides, and c is the length of the hypotenuse.2. Theorems of Euclidean Geometry: Euclidean geometry, named after the ancient Greek mathematician Euclid, is the study of plane and solid figures based on a set of axioms and theorems. Some of the key theorems include the Parallel Postulate, the Angle Sum Theorem, the Pythagorean Theorem, and the Midpoint Theorem.3. Transformations: Transformations in geometry refer to the ways in which a figure can be moved, reflected, rotated, or scaled without changing its shape or size. Common transformations include translations (sliding), reflections (flipping), rotations (turning), and dilations (resizing).4. Coordinates and Graphs: The coordinate plane is a fundamental tool in geometry, consisting of two perpendicular number lines that intersect at the origin (0,0). Points on the plane are represented by ordered pairs of numbers (x,y) called coordinates. By plotting points on the coordinate plane, geometric figures and relationships can be visualized and analyzed.5. Trigonometry: Trigonometry is the branch of mathematics that deals with the study of angles and the lengths of their sides in triangles. It is an essential tool in understanding the relationships between angles and sides, and is widely used in fields such as engineering, physics, and navigation.6. Three-Dimensional Geometry: In addition to the two-dimensional shapes and figures, geometry also encompasses three-dimensional objects such as prisms, pyramids, spheres, cones, and cylinders. Three-dimensional geometry involves the measurement of volume, surface area, and spatial relationships between solid figures.Applications of GeometryThe principles of geometry have a wide range of applications in various fields of study and professions. Some of the key applications include:1. Architecture: Architects use geometry to design and construct buildings, bridges, and other structures. Understanding principles of symmetry, proportion, and spatial relationships is crucial in creating aesthetically pleasing and structurally sound designs.2. Engineering: Engineers utilize geometry in designing and analyzing mechanical components, electrical circuits, and structural frameworks. Geometric concepts such as vectors, forces, and dimensions play a critical role in the field of engineering.3. Cartography: Cartographers use geometry in creating maps and geographic information systems. By understanding the principles of projections, scales, and angles, accurate representations of geographic features can be produced.4. Art and Design: Artists and designers often incorporate geometric shapes, patterns, and proportions in their work. Understanding geometric principles allows them to create compositions with balance, harmony, and visual appeal.5. Computer Graphics: The field of computer graphics heavily relies on geometric algorithms and principles to create visual representations of virtual environments, objects, and characters in video games, movies, and simulations.ConclusionGeometry is a fundamental branch of mathematics that encompasses the study of shapes, sizes, and properties of space. By understanding the basic concepts of points, lines, angles, polygons, and circles, as well as the advanced principles of transformations, coordinates, trigonometry, and three-dimensional geometry, we are able to make sense of the world around us in a more precise and systematic manner.The principles of geometry have a wide range of applications in various fields of study and professions, including architecture, engineering, cartography, art and design, and computer graphics. By applying the principles of geometry to solve problems and analyze real-world scenarios, we are able to create, innovate, and understand the world in a more profound way. As we continue to advance in our understanding of geometry, we open up new possibilities for exploration, discovery, and creativity in the world of mathematics and beyond.。
precalculus知识点总结
precalculus知识点总结Precalculus is an essential branch of mathematics that serves as a bridge between algebra, geometry, and calculus. This subject is crucial for students preparing to undertake advanced courses in mathematics, physics, engineering, and other technical fields. In this precalculus knowledge summary, we will cover important topics such as functions, trigonometry, and analytic geometry.FunctionsOne of the fundamental concepts in precalculus is that of functions. A function is a relationship between two sets of numbers, where each input is associated with exactly one output. In other words, it assigns a unique value to each input. Functions can be represented in various forms, such as algebraic expressions, tables, graphs, and verbal descriptions.The most common types of functions encountered in precalculus include linear, quadratic, polynomial, rational, exponential, logarithmic, and trigonometric functions. Each type of function has its own unique characteristics and properties. For example, linear functions have a constant rate of change, while quadratic functions have a parabolic shape.Functions can be manipulated by performing operations such as addition, subtraction, multiplication, division, composition, and inversion. These operations can be used to create new functions from existing ones, or to analyze the behavior of functions under different conditions.TrigonometryTrigonometry is the study of the relationships between the angles and sides of triangles. It plays a crucial role in precalculus and is essential for understanding periodic phenomena such as oscillations, waves, and circular motion.The primary trigonometric functions are sine, cosine, and tangent, which are defined in terms of the sides of a right-angled triangle. These functions have various properties, such as periodicity, amplitude, and phase shift, which are important for modeling and analyzing periodic phenomena.Trigonometric functions can also be extended to the entire real line using their geometric definitions. They exhibit various symmetries and periodic behaviors, which can be visualized using the unit circle or trigonometric graphs. Additionally, trigonometric identities and equations are essential tools for simplifying expressions, solving equations, and proving theorems.Analytic GeometryAnalytic geometry is a branch of mathematics that combines algebra and geometry. It deals with the use of algebraic techniques to study geometric shapes and their properties. Inprecalculus, this subject is primarily concerned with the study of conic sections, such as circles, ellipses, parabolas, and hyperbolas.The equations of conic sections can be derived using geometric constructions, or by using algebraic methods such as completing the square, factoring, and manipulating equations. These equations can then be used to describe the geometric properties of conic sections, such as their shape, size, orientation, and position.Furthermore, analytic geometry also involves the study of vectors and matrices, which are important tools for representing and manipulating geometric objects in higher dimensions. Vectors can be used to represent points, lines, and planes in space, while matrices can be used to perform transformations such as rotations, reflections, and scaling.Other TopicsIn addition to the core topics mentioned above, precalculus also covers other important concepts such as complex numbers, polar coordinates, sequences and series, and mathematical induction. Complex numbers are used to extend the real number system to include solutions to equations that have no real roots. They have applications in various fields such as electrical engineering, quantum mechanics, and signal processing.Polar coordinates provide an alternative way of describing points in the plane using radial distance and angular direction. They are particularly useful for representing periodic and circular motion, as well as for simplifying certain types of calculations in calculus.Sequences and series are ordered lists of numbers that have a specific pattern or rule. They can be finite or infinite, and their sums can be used to represent various types of mathematical and physical phenomena. For example, arithmetic sequences are used to model linear growth or decline, while geometric series are used to model exponential growth or decay.Finally, mathematical induction is a powerful method for proving statements about positive integers. It is based on the principle that if a certain property holds for a base case, and if it can be shown that it also holds for the next case, then it holds for all subsequent cases as well. This method is widely used in various areas of mathematics, such as number theory, combinatorics, and discrete mathematics.ConclusionIn conclusion, precalculus is a diverse and rich subject that covers a wide range of mathematical concepts and techniques. It provides students with the necessary foundation to tackle more advanced topics in calculus and beyond. By mastering the core topics of precalculus, students will be well-equipped to understand and apply advanced mathematical methods in various technical fields. Whether it be functions, trigonometry, analytic geometry, or any other topic, a solid understanding of precalculus is essential for success in higher mathematics.。
强力推荐 新课标初中数学单词汇总(人教版)
强力推荐新课标初中数学单词汇总(人教版)以下是一份强力推荐的新课标初中数学单词汇总,适用于人教版教材。
这个词汇表包含了初中数学中常见的词汇,并且可以帮助学生更好地理解和记忆数学概念。
一、数字和符号 (Numbers and Symbols)- 数字 (Numbers)- 整数 (Integers)- 分数 (Fractions)- 百分数 (Percentages)- 小数 (Decimals)- 无理数 (Irrational Numbers)- 正数和负数 (Positive and Negative Numbers)- 运算符号 (Mathematical Symbols)二、几何和形状 (Geometry and Shapes)- 点、线、平面 (Points, Lines, and Planes)- 角 (Angles)- 直线和曲线 (Lines and Curves)- 三角形 (Triangles)- 四边形 (Quadrilaterals)- 圆 (Circles)- 立体几何 (Solid Geometry)三、代数 (Algebra)- 变量和常数 (Variables and Constants)- 代数表达式 (Algebraic Expressions)- 方程和不等式 (Equations and Inequalities)- 函数 (Functions)- 图像 (Graphs)- 比例和比例关系 (Proportions and Ratios)四、数据和统计 (Data and Statistics)- 数据收集和整理 (Data Collection and Organization) - 图表和图形 (Charts and Graphs)- 平均数和中位数 (Mean and Median)- 概率 (Probability)五、数学运算 (Mathematical Operations)- 加法和减法 (Addition and Subtraction)- 乘法和除法 (Multiplication and Division)- 指数和幂 (Exponents and Powers)- 根号和平方 (Square Roots and Squares)- 对数和对数函数 (Logarithms and Logarithmic Functions)这份数学单词汇总可以帮助学生清晰地理解数学概念,并在研究过程中更顺利地掌握新知识。
SOLID MODELING翻译
SOLID MODELING实体造型6.1 Application of Solid Models实体模型的应用In mechanical engineering, a solid model is used for the following applications:在机械工程中,一个实体模型被用于以下应用:1、Graphics: generating drawings, surface and solid models图形:生成图纸,表面和实体模型2、Design: Mass property calculation, interference analysis, finite element modeling, kinematics and mechanism analysis, animation, etc.设计:质量计算、干涉分析、有限元建模、运动学及机理分析、动画等。
3 、Manufacturing: Tool path generation and verification, process planning, dimension inspection, tolerance and surface finish.制造业:刀具轨迹的生成和验证,工艺设计,尺寸检验,公差及表面处理。
4 、Component Assembly: Application to robotics and flexible manufacturing: Assembly planning, vision algorithm, kinematics and dynamics driven by solid models.组件组装:应用于机器人和柔性制造:装配规划,视觉算法,运动学和动力学模型的驱动。
6.2 Solid Model Representation实体模型表示There are three different forms in which a solid model can be represented in CAD:有三种不同的形式,其中一个实体模型可以表示在计算机辅助设计:·Wireframe Model线架模型·Surface Model曲面模型·Solid Model实体模型Wireframe Models: Joining points and curves creates wireframe models. These models can be ambiguous and unable to provide mass property calculations, hidden surface removal, or generation of shaded images. Wireframe models are mainly used for a quick verification of design ideas.线框模型:连接点和曲线创建线框模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Name: WORKSHEET: Points, Lines and Planes
For 1 – 5, use the diagram to determine if each statement is TRUE or FALSE. JUSTIFY your answer.
1. Point A lies on line m.
2. B, C and D are collinear.
3. A, B and F are coplanar.
4. A, B, C, and D are collinear.
5. CD and CE are coplanar.
For 6 – 9, name a point that is COLLINEAR with the given points.
6. E and D
7. C and A
8. D and B
9. B and G
For 10 – 13, name a point that is COPLANAR with the given points.
10. J, K and L
11. J, K, and E
12. E, K, and M
13. J, L, and G
For 14 – 17, use the diagram.
14. Name THREE (3) points that are COLLINEAR.
15. Name TWO (2) lines that are COPLANAR.
16. Name THREE (3) points that are NOT COLLINEAR.
17. Name FOUR (4) points that are NOT COPLANAR.
For 18 – 24, decide whether the statement is TRUE or FALSE. JUSTIFY your answer.
18. Planes Q and R intersect at line n.
19. Planes P and Q intersect at line m.
20. Planes R and S do not appear to intersect.
21. Planes S and P do not appear to intersect.
22. Lines n and appear to intersect.
23. Planes Q and S intersect at line m.
24. Lines and m do not appear to intersect.
For 25 – 28, sketch each figure described.
25. Two lines that lie in a plane and intersect at a point.
26. Two planes that intersect in a line.
27. Two planes that do not intersect.
28. A line that intersects a plane at a point.。