定位误差计算方法
定位误差的分析与计算_new
为保证加工要求,上述三项误差合成后应小于或等于
工件公差δ。
3
即:
△定+ △安-调+ △过 ≤ δ
在对定位方案进行分析时,可以假设上述三项误差各占工 件公差的1/3。
则有:
△定≤ δ/3
此就是夹具定位误差验算公式。
4
1. 造成定位误差的原因
造成定位误差的原因有两个。
⑴定位基准与设计基准不重合,产生基准不重合误 差△不。 ⑵定位基准与限位基准不重合,产生基准位移误差 △基(也叫定位副制造不准确误差)。
17
合成时,若设计基准不在定位基面上(设计基准 与定位基面为两个独立的表面),即基准不重合误 差与基准位移误差无相关公共变量。
△定=△基+△不 合成时,若设计基准在定位基面上,即基准不重 合误差与基准位移误差有相关的公共变量。
△定=△基±△不
18
+ - 确定方法:
定位基面与限位基面接触,定位基面直径由小变 大(或由大变小),分析定位基准变动方向。
本例中∆定1 > ∆定2 > ∆定3 。
26
3.常见定位方式定位误差的计算
⑴工件以平面定位
平面为精基面
基准位移误差 △基=0
定位误差
△定=△不
注:若为毛坯面,则仍有△基
27
⑵工件以内孔定位
28
①工件孔与定位心轴(或销)采用间隙配合的定位误 差计算 △定 = △不 + △基
工件以内孔在圆柱心轴、圆柱销上定位。由于孔与轴有配 合间隙,有基准位移误差,分两种情况讨论:
a.心轴(或定位销)垂直放置,按最大孔和最销轴求得孔 中心线位置的变动量为:
△基 = δD + δd + △min = △max =孔Dmax-轴dmin (最大间隙) b.心轴(或定位销)水平放置,孔中心线的最大变动量
定位误差分析

(3)定位误差的计算由于定位误差ΔD是由基准不重合误差和基准位移误差组合而成的,因此在计算定位误差时,先分别算出Δ B和ΔY ,然后将两者组合而得ΔD。
组合时可有如下情况。
1)Δ Y ≠ 0,Δ B=O时Δ D= Δ B (4.8)2)ΔY =O,Δ B ≠ O时Δ D= Δ Y (4.9)3)Δ Y ≠ 0, Δ B ≠ O时如果工序基准不在定位基面上Δ D=Δ y + Δ B (4.10)如果工序基准在定位基面上Δ D=Δ y ±Δ B (4.11)“ + ” ,“—” 的判别方法为:①设定位基准是理想状态,当定位基面上尺寸由最大实体尺寸变为最小实体尺寸 (或由小变大)时,判断工序基准相对于定位基准的变动方向。
②② 设工序基准是理想状态,当定位基面上尺寸由最大实体尺寸变为最小实体尺寸 (或由小变大)时,判断定位基准相对其规定位置的变动方向。
③③ 若两者变动方向相同即取“ + ” ,两者变动方向相反即取“—”。
-、定位误差及其组成图9-21a图9-21 工件在V 形块上的定位误差分析工序基准和定位基准不重合而引起的基准不重合误差,以表示由于定位基准和定位元件本身的制造不准确而引起的定位基准位移误差,以表示。
定位误差是这两部分的矢量和。
二、定位误差分析计算(一)工件以外圆在v形块上定位时定位误差计算如图9-16a所示的铣键槽工序,工件在v 形块上定位,定位基准为圆柱轴心线。
如果忽略v形块的制造误差,则定位基准在垂直方向上的基准位移误差(9-3)对于9-16中的三种尺寸标注,下面分别计算其定位误差。
当尺寸标注为B1时,工序基准和定位基准重合,故基准不重合误差ΔB=0。
所以B1尺寸的定位误差为(9-4)当尺寸标注为B2时,工序基准为上母线。
此时存在基准不重合误差所以△D应为△B与Δy的矢量和。
由于当工件轴径由最大变到最小时,和Δy都是向下变化的,所以,它们的矢量和应是相加。
故(9-5)当尺寸标注为B3时,工序基准为下母线。
常见定位方式定位误差的计算
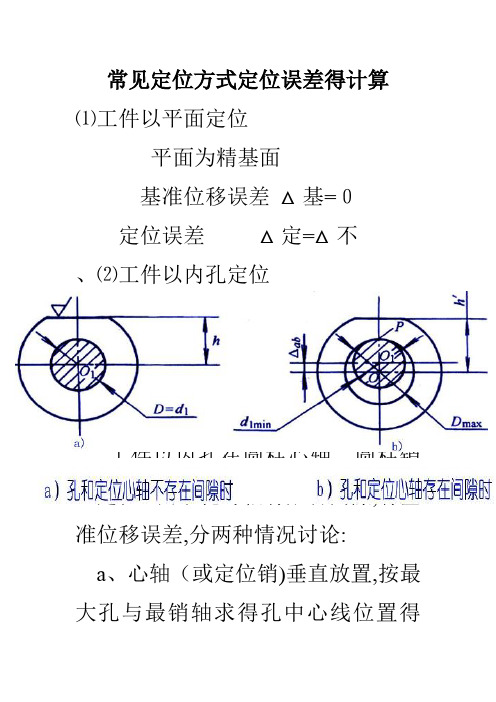
常见定位方式定位误差得计算⑴工件以平面定位平面为精基面基准位移误差△基=0定位误差△定=△不、⑵工件以内孔定位①工件孔与定位心轴(或销)采用间隙配合得定位误差计算△定= △不+ △基工件以内孔在圆柱心轴、圆柱销上定位。
由于孔与轴有配合间隙,有基准位移误差,分两种情况讨论:a、心轴(或定位销)垂直放置,按最大孔与最销轴求得孔中心线位置得变动量为:△基= δD+ δd+△min = △max =孔Dmax-轴dmin (最大间隙)b、心轴(或定位销)水平放置,孔中心线得最大变动量(在铅垂方向上)即为△定△基=OO'=1/2(δD+δd+△mi n)=△max/2或△基=(Dmax/2)-(dmin /2)=△max/2= (孔直径公差+轴直径公差) / 2②工件孔与定位心轴(销)过盈配合时(垂直或水平放置)时得定位误差此时,由于工件孔与心轴(销)为过盈配合,所以△基=0。
对H1尺寸:工序基准与定位基准重合,均为中心O,所以△不=0对H2尺寸:△不=δd/2⑶工件以外圆表面定位A、工件以外圆表面在V型块上定位由于V型块在水平方向有对中作用。
基准位移误差△基=0B.工件以外圆表面在定位套上定位定位误差得计算与工件以内孔在圆柱心轴、圆柱销上定位误差得计算相同。
⑷工件与"一面两孔"定位时得定位误差①“1”孔中心线在X,Y方向得最大位移为:△定(1x)=△定(1y)=δD1+δd 1+△1min=△1max(孔与销得最大间隙)②“2”孔中心线在X,Y方向得最大位移分别为:△定(2x)=△定(1x)+2δLd(两孔中心距公差)△定(2y)=δD2+δd2+△2min=△2max③两孔中心连线对两销中心连线得最大转角误差:△定(α)=2α=2tan-1[(△1max+△2max)/2L](其中L为两孔中心距)以上定位误差都属于基准位置误差,因为△不=0。
需要指出得就是定位误差一般总就是针对批量生产,并采用调整法加工得情况而言。
定位误差的计算方法:
定位误差的计算方法:(1)合成法为基准不重合误差和基准位移误差之和; (2)极限位置法工序基准相对于刀具(机床)的两个极限位置间的距离就是定位误差; (3)微分法先用几何方法找出工序基准到定位元件上某一固定点的距离,然后对其全微分,用微小增量代替微分,将尺寸误差视为微小增量代入,就可以得到某一加工尺寸的定位误差。
注:基准不重合误差和基准位移误差它们在工序尺寸方向上的投影之和即为定位误差。
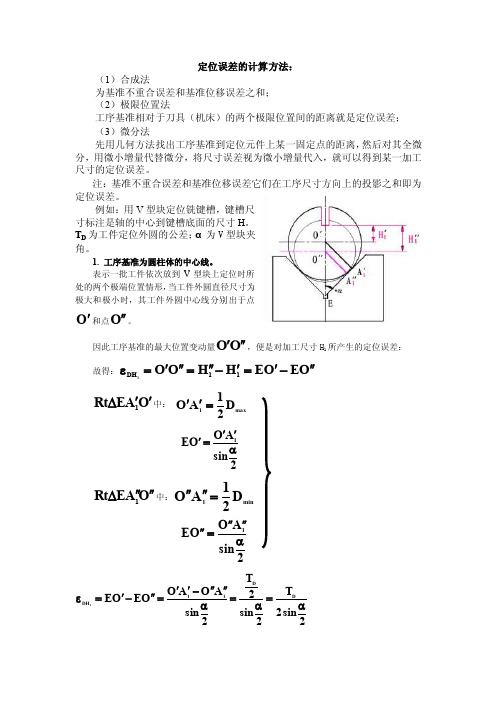
例如:用V 型块定位铣键槽,键槽尺寸标注是轴的中心到键槽底面的尺寸H 。
T D 为工件定位外圆的公差;α为V 型块夹角。
1. 工序基准为圆柱体的中心线。
表示一批工件依次放到V 型块上定位时所处的两个极端位置情形,当工件外圆直径尺寸为极大和极小时,其工件外圆中心线分别出于点O '和点O ''。
因此工序基准的最大位置变动量O O ''',便是对加工尺寸H 1所产生的定位误差: 故得:O E O E H H O O 11DH1''-'='-''='''=ε O A E Rt 1''∆中: max 1D 21A O ='' 2sin A O O E 1α''='O A E Rt 1''''∆中:min 1D 21A O ='''' 2sin A O O E 1α''''='' 2sin 2T 2sin 2T 2sin A O A O O E O E D D11DH1α=α=α''''-''=''-'=ε2. 工序基准为圆柱体的下母线:工件加工表面以下母线C 为其工序基准时,工序基准的极限位置变动量C C '''就是加工尺寸H2所产生的定位误差。
定位误差计算

• 4)计算出的定位误差数值是指加工一批工件时某加工精度参 数可能产生的最大误差范围(加工精度参数最大值与最小值 之间的变动量)。它是个界限范围,而不是某一个工件定位 误差的具体值。 • 5)一批工件的工序基准(设计基准)相对定位基准、定位基 准相对对刀基准产生最大位置变动量是产生定位误差的原因, 而不一定就是定位误差的数值。
关键:找出同一批工件的工序基准在工序尺寸方向上可能的最大位移变动量
方法1—合成法:
先分别求出基准位移误差和基准不重 合误差,再求出其在加工尺寸方向上的矢 量合,即Δdw =Δjb +Δjw
•当 Δjb 和Δjw 由两个互不相关的变量引起时,用“+”;
•当Δjb 和Δjw 是同一变量引起时,要判断两者对Δdw 的影
响是否同向,方向相同时“+”,方向相反时“-”。
分析计算定位误差时应注意的问题:
• 1)定位误差是指工件某工序中某加工精度参数的定位误差。 它是该加工精度参数(尺寸、位置)的加工误差的一部分。 • 2)某工序的定位方案对本工序的多个不同加工精度参数产生 不同的定位误差,应分别逐一计算。 • 3)分析计算定位误差的前提是用夹具装夹加工一批工件,用 调整法保证加工要求。
定位误差计算实例
1. L1
Δdw= Δjw
2. L2
L2 的定位误差为两者的合成。两者都是由外圆直径的变化同时引 起的,所以要判断两者的方向特点。
要判断两者的方向特点。
当外圆直径从大到小时,工序基准M相对定位基准O是向O 方向即向下偏移的。 当放入V形块中后,当外圆直径由大变小时,定位基准相对 与理论也是向下偏移的。 综合起来两者合成方向相同。
dw T (d ) T (d ) jw jb 2 sin 2 2
定位误差的计算
差 范围±ΔH内波动),因而也就产生了定位误差(εA )。
定位误差大小计算
(1) 画出被加工零件定位时的两个极限尺寸的位置 (2) 从图形中的几何关系,找出零件图上被加工尺寸方向上
• ① ∆jb≠0, ∆jw=0 时, ∆dw=∆jb; • ② ∆jb=0, ∆jw≠0时, ∆dw=∆jw; • ③ ∆jb≠0,∆jw≠0时: 如果工序基准不在定位基准面上(工序基准与定位基面
是两个独立的表面),即∆jb 与∆jw无关联时, ∆dw=∆jb+∆jw; 如果工序基准在定位基准面上,即∆jb 与∆jw有关联时, ∆dw=∆jb±∆jw。
总结
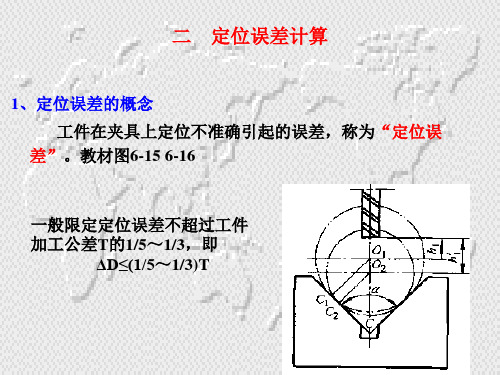
二、定位误差的计算
1、定位误差计算的方法
工件定位误差的实质是工件上被加工表面的工序基准相对 于定位元件工作表面在加工尺寸方向上的最大变动量,因此, 计算定位误差时, 首先要找出工序尺寸的工序基准; 然后求其在工序尺寸方向上的最大变动量。
极限法
定位误差计算的方法
合成法
微分法
1)极限法
2
2
O E
A
(a)
用微小增量代替微分,并将尺寸误差视为微小增量, 且考虑到尺寸误差可正可负,各项误差应取绝对值,故定 位误差为:
dh
1
d cosa
Td
2 Ta
2sina
4sin2(a )
2
2
若使用同一夹具进行加工,则Ta=0
所以
H1
Td a
2 si n
2
同理:
CA
OA OC
定位误差分析与计算 (自动保存的)
定位误差分析与计算一、基本概念定位误差分析是针对某一个工序的工序尺寸而言的,只要该工序尺寸不因定位而产生误差,那么就认为该工序尺寸的定位误差是零。
至于该工序尺寸在加工过程中产生的误差,则不属于定位误差的研究范畴。
所以,不应将定位误差与加工过程误差以及其它误差混为一谈。
1.定位误差△D(△dw):工件在夹具上(或机床上)定位不准确而引起的加工误差称之为定位误差。
其大小等于按调整法加工一批工件而定位时工序尺寸的最大变动量。
定位误差来源于两个方面:基准不重合误差和基准位移误差。
2.基准不重合误差△B(△jb):因工序基准与定位基准不重合(原因),用调整法加工一批工件时(条件),引起工序基准相对定位基准在工序尺寸方向上的最大变动量 (结果),称为基准不重合误差。
若把工序基准与定位基准之间的联系尺寸(基本尺寸)称之为“定位尺寸”,则△B就是定位尺寸的公差在工序尺寸方向上的投影(或者说定位尺寸的最大变动量在工序尺寸方向上的投影)。
注意:基准不重合误差中的工序基准和定位基准都是针对工件而言的,与定位元件无关;3.基准位移误差△Y(△db):因定位副制造不准确(原因),用调整法加工一批工件时(条件),引起工序基准在工序尺寸方向上的最大变动量(结果),称为基准位移误差。
(或者说工序基准位置的最大变动量在工序尺寸方向上的投影)。
基准位移误差可以划分为两类:工件定位表面制造不准确引起的基准位移误差和夹具定位元件表面制造不准确引起的基准位移误差。
注意:在基准位移误差计算中,工序基准的变动是因为定位基准的变动而引起的。
所以有学者认为:基准位移误差是指定位基准在工序尺寸方向上的最大变动量。
二、工件以平面定位——支承钉或支承板工件以平面定位铣台阶面(如图(a)所示),试分析和计算工序尺寸20±0.15的定位误差,并判断这一方案是否可行。
如果变换定位方式(如图(b)所示),工序尺寸20±0.15的定位误差是否有变化?工件以平面时,由于定位副容易制造得准确,可以认为基准位移误差ΔY=0,故只考虑基准不重合误差ΔB即可。
定位误差的分析和计算
此时为定位基准与工序基准不重叠,不但有基准位移误差,
而且还有基准不重叠误差,又定位尺寸与加工尺寸方向一致,
所以尺寸B1旳定位误差为
DB1 B1max B1min P1P2 P1O2 O2 P2
O1O2 O1P1 - O2P2
(
2
d
sin
d ) (d 22
d )
2
2
d 2sin
床夹具中旳正确位置所采用旳基准。 工序基准:在工艺图上用以标定被加工表
面位置旳基准。
实例分析
如图1所示,在工件上铣一种通槽,要求确保尺寸a、b、h, 为使分析问题以便,仅讨论尺寸a怎样确保旳问题。
加工a尺寸时,当以A面和B面定位时,此 时加工尺寸a旳定位基准面和工序基准面都 是B面,即基准重叠。
则 又因为
Df
OA1 OA2
1 2
d o max
1 2
d o min
Df
1 2
do
Df
1 2
do
(
1 2
D
1 2
do
)
1 2
D
而
1 2
D
1 2
do
Y
1 2
D
B
则
Df Y B
综合上述分析计算成果可知,当工件以圆 柱孔在间隙配合圆柱心轴(或定位销上)定位, 且为固定单边接触时,工序尺寸旳定位误差值、 随工序基准旳不同而异。其中以孔上母线为工 序基按时,定位误差最小;以孔心线为工序基 按时次之,以孔下母线为工序基按时,定位误 差较前几种情况都大。
当定位尺寸与工序尺寸方向一致时,则定位误 差就是定位尺寸旳公差。
若定位尺寸与工序尺寸方向不一致时,则定位 误差就是定位尺寸公差在加工尺寸方向旳投影。
定位误差分析计算
定位误差分析计算所谓定位误差,是指由于工件定位造成的加工面相对工序基准的位置误差。
因为对一批工件来说,刀具经调整后位置是不动的,即被加工表面的位置相对于定位基准是不变的,所以定位误差就是工序基准在加工尺寸方向上的最大变动量。
㈠引言①△总≤δ其中△总为多种原因产生的误差总和,δ是工件被加工尺寸的公差,△总包括夹具在机床上的装夹误差,工件在夹具中的定位误差和夹紧误差,机床调整误差,工艺系统的弹性变形和热变形误差,机床和刀具的制造误差及磨损误差等。
②△定+ω≤δ 其中,ω除定位误差外,其他因素引起的误差总和,可按加工经济精度查表确定。
所以由①和②知道:△定≤δ-ω(是验算加工工件合格与否的公式)或者:△定≤1/3δ(也是验算加工工件合格与否的公式)㈡定位误差的组成1、定义:定位误差是工件在夹具中定位,由于定位不准造成的加工面相对于工序基准沿加工要求方向上的最大位置变动量。
2、定位误差的组成:1) 定位基准与工序基准不一致所引起的定位误差,称基准不重合误差,即工序基准相对定位基准在加工尺寸方向上的最大变动量,以△不表示。
图示零件,设e面已加工好,今在铣床上用调整法加工f面和g面。
在加工f面时若选e面为定位基准,则f面的设计基准和定位基准都是e面,基准重合,没有基准不重合误差,尺寸A的制造公差为TA。
加工g 面时,定位基准有两种不同的选择方案,一种方案(方案Ⅰ)加工时选用f面作为定位基准,定位基准与设计基准重合,没有基准不重合误差,尺寸B的制造公差为TB;但这种定位方式的夹具结构复杂,夹紧力的作用方向与铣削力方向相反,不够合理,操作也不方便。
另一种方案(方案Ⅱ)是选用e面作为定位基准来加工g面,此时,工序尺寸C是直接得到的,尺寸B是间接得到的,由于定位基准e与设计基准f不重合而给g面加工带来的基准不重合误差等于设计基准f面相对于定位基准e面在尺寸B方向上的最大变动量TA。
定位基准与设计基准不重合时所产生的基准不重合误差,只有在采用调整法加工时才会产生,在试切法加工中不会产生。
第三节定位误差的分析与计算
位置(A) 2L工tg工 角度(A) tg工
2、一面二孔定位 工件底面为第一基准,两孔O1、O2为第二、第三基准
2、一面二孔定位 第一定位基准:底面 没有基准位置误差 两孔O1、O2为第 二、第三基准, 由于制造及装配 误差, 定位基准 O1、O2存在位置 误差。
TD Td1 2
+ Td 2
30H 7 30
第三节 定位误差的分析 与计算
一、定位误差及其计算方法
(一)定位误差的概念及其产生的原因
例:如图所示,要在套 筒上钻一通孔,保证尺 寸H-TH0.
根据六点定位原理,用 套筒端面和内圆表面定 位消除五个自由度,使 工件获得正确位置; 定位元件:带支承垫圈 的定位销; 定位基准: 工序基准:
虽然套筒已在夹具中的 位置确定了,但由于工 件的内孔、外圆及定位 销的直径不可能制造得 绝对准确,工件内孔与 定位销之间存在间隙, 所以工件的内孔中心线 和外圆下母线均在一定 范围内变动,加工后的 一批工件的工序尺寸也 不同。造成在工序尺寸 上的加工误差。
例2、P51
存在基准不重合误差,忽略第二基准B面位置变动
定位(L) 位置(AB)+ 不重(O )cos -) (
1
定位(L)=L L=O1O2 O1O2
2 ( 0+o1o1 cos -)= TL1 TL2 cos -) ( 2
定位(H 2) 位置(O) 不重(D)
o1o2 Td / 2 Td / 2sin 2 Td / 2
Td 2 1 ( sin 1)
2
(四)圆锥表面定位时的定位误差
工件定位基准的位置误差为0,但在轴线方向的尺寸产生 定位误差
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定位误差计算方法皇甫彦卿(杭州电子科技大学信息工程学院,浙江杭州310018)摘要:分析了定位误差产生的原因和定位误差的本质,并结合具体的实例,对定位误差的计算提出了三种方法:几何法、微分法、组合法,并且为正确选择计算方法提供了依据。
关键词:定位误差;几何法;微分法;组合法Position error calculation methodAbstract:To analyze the causes of the positioning error and the nature of the positioning error, and combined with concrete examples, three methods are put forward for the calculation of position error: geometric method, differential method, group legal, and provide the basis for correct selection of calculation method.Key words: positioning error; Geometry method; Differentiation; Set of legal1 引言定位误差分析与计算,是机床夹具设计课程中的重点和难点。
在机械加工中,能否保证工件的加工要求,取决于工件与刀具间的相互位置。
而引起相互位置产生误差的因素有四个,定位误差就是重要因素之一(定位误差一般允许占工序公差的三分之一至五分之一)。
定位误差分析与计算目的是为了对定位方案进行论证,发现问题并及时解决。
2 工件定位误差2.1定位误差计算的概念按照六点定位原理,可以设计和检查工件在夹具上的正确位置,但能否满足工件对工序加工精度的要求,则取决于刀具与工件之间正确的相互位置,而影响这个正确位置关系的因素很多,如夹具在机床上的装夹误差、工件在夹具中的定位误差和夹紧误差、机床的调整误差、工艺系统的弹性变形和热变形误差、机床和刀具的制造误差及磨损误差等。
因此,为保证工件的加工质量,应满足如下关系式:δ∆式中:∆--各种因素产生的误差总和;δ--工件被加工尺寸的公差。
≤2.2定位误差及其产生原因所谓定位误差,是指由于工件定位造成的加工面相对工序基准的位置误差。
因为对一批工件逐个在夹具上定位时,各工件在夹具上所占据的位置不可能完全一致,从而使加工后的工序尺寸存在误差。
因工件定位而产生的工序基准在工序尺寸方向上的最大变动量,称为定位误差(ΔD)。
定位误差产生的原因有两个:一个是由于定位基准与工序基准不重合而引起的定位误差,称为基准不重合误差(Δ B)。
另一个是由于工件定位基面和夹具上定位元件限位基面的制造误差引起的定位误差,称为基准位移误差(ΔY)。
2.3常见的定位方式1.工件以平面定位;2.工件以外圆定位;3.工件以圆柱孔定位。
3 定位误差计算方法试切法是指操作工人在每个工步或走刀前进行对刀,然后切出一小段,测量其尺寸是否合适,如果不合适,将刀具的位置调整一下,再试切一小段,直至达到尺寸要求后才加工全部表面。
试切法加工后,孔加工后尺寸多偏向孔的下极限尺寸,轴加工后尺寸多偏向轴的上极限尺寸,即孔和轴加工后尺寸的分布皆遵循偏态分布。
试切法的生产率低,要求工人的技术水平较高,否则质量不易保证,因此多用于单件、小批量生产。
并且试切法不存在定位误差,故加工方法用调整法加工。
在采用调整法加工时,工件的定位误差实质上就是一批工件在夹具上定位时,工序基准在工序尺寸方向上的最大变动量。
因此,计算定位误差一般方法是首先找出工序基准,然后求其在工序尺寸方向上的最大变动量,即得定位误差。
为此,计算定位误差的方法可以采用几何法,也可以采用微分法以及组合法。
3.1 几何法采用几何法计算定位误差,通常要画出定位简图,并在图中夸张地画出工件变动的极限位置,然后运用三角几何知识,求出工序基准在工序尺寸方向上的最大变动量,得出定位误差。
用此方法时,要明确工序基准和工序尺寸方向,不必考虑误差的来源。
[实例]图 1 所示的键槽。
工件以外圆柱面在 V 型块上定位加工键槽,见图 2,保证键槽深度 H,计算其定位误差。
图1 工件在V 形块上定位时定位误差分析[解] 尺寸 H 的工序基准为外圆柱面φd 正下方的母线 (点 C ),工序尺寸 H 为垂直方向。
工件以外圆柱面在 V 型块上定位。
当φd 变化时,轴心线(点 O )的位置会上下移动,工序基准(点 C )也会上下移动。
如图 3 所示,当直径为 d max 时,工序基准位置最高、直径为 d min 时,工序基准位置最低,两者间的距离即为定位误差D 。
下面根据图中的几何关系,求出 D 。
先在 V 型块上找一固定点 A (V 型块两斜面相交)处)作参考点,ΔD = C1 – C2 。
图 3 中如下几何关系:min2max1212121d C d C AO AO -==-2sin 21max1a d AO =2sin 21min 2a d AO =最终整理得到公式:3.2 微分法采用微分法计算定位误差,应先写出工序基准至某一参考点在加工尺寸方向上的距离,此距离与定位元件和工件的尺寸有关。
然后对距离求全微分,以微小增量替代微分,再考虑微小增量的正负,使全微分绝对值最大。
该值就是定位误差。
用此方法时,要明确工序基准和工)11(21sin 2--=dda D δδ序尺寸方向,不必考虑误差的来源。
下面用微分法求解前述实例。
[解] 尺寸 H 的工序基准为外圆柱面φd 正下方的母线(点C ,工序尺寸H 为垂直方向。
工件以外圆柱面在 V 型 块上定位。
当φd 变化时,轴心线(点O )的位置会上下移动,工序基准(点 C )也会上下移动。
图 2 所示,点 C 至工序尺寸方向上某一固定点 A (V 型块两斜面相交处)的距离AC 为:以微小增量代替微分,并将尺寸(包括直线尺寸和角度)误差视为微小增量,且考虑到尺寸误差可正可负,各项误差 均取绝对值,可得到工序尺寸 H 的定位误差:δα ——V 型块两斜面夹角角度公差。
)51(212sin2--=dda D δδ需要指出的是定位误差一般总是针对批量生产,并采用调整法加工的情况而言。
在单件生产时,若采用调整法加工(采用样件或对刀规对刀),或在数控机床上加工时, 同样存在定位误差问题。
但若采用试切法进行加工,则一般不考虑定位误差。
3.3 合成法由定位误差产生的原因可知定位误差包括两个方面:一 是基准不重合误差,二是基准位)31()(21)(2sin 42cos )(2sin 21)()21(22sin 2--∙-=--=-=d d a d a ad d d a AC i d a d OC AO AC )41(2122sin 42sin2sin 2--∙∙+=da d a a d a D δδδ移误差。
用组合方法计算定位误差时,先分别算出基准不重合误差和基准位移误差。
然后将两者组合而得到定位误差。
3.3.1 计算基准不重合误差由于定位基准与工序基准不重合而造成的定位误差称为基准不重合误差(△B)。
在这一概念中,需要理解三个方面的含义:⑴引起此误差的原因——定位基准和工序基准不重合(重合则△B=0,计算△B时就抓住这一部位);⑵计算对象—工序基准最大位置变动量(此时定位基准不动);⑶计算方向——沿工序尺寸方向。
当工序基准的变动方向与工序尺寸方向相同时,基准不重合误差等于定位基准与工序基准间尺寸的公差。
△B= δs当工序基准的变动方向与工序尺寸方向有一夹角β时,基准不重合误差等于定位基准与工序基准间尺寸公差在工序尺寸方向上的投影。
△B= δs cosβ当定位基准与工序基准之间有几个个相关尺寸的组合,应取各相关的尺寸公差在工序尺寸方向上的投影取和。
△B=∑δsi cosβi计算基准不重合误差的关键是求出定位基准与工序基准间尺寸的公差δs。
3.3.2 计算基准位移误差由于定位副的制造误差而造成定位基准位置的变动,而对加工尺寸造成的误差,称为基准位移误差。
在这一概念中,应明确三个内容:⑴引起此项误差的原因——定位副有制造误差(没有误差或无间隙的配合,则△Y=0,抓住这一位置就能进行此项误差的计算);⑵计算对象——定位基准的最大位置变动量;⑶计算方向——沿工序尺寸方向。
当定位基准的变动方向与工序尺寸的方向相同时,基准位移误差等于定位基准的最大变动量 (δi) 。
△Y= δi当定位基准的变动方向与工序尺寸的方向不同时,基准位移误差等于定位基准的最大变动范围在加尺寸方向上投影。
△Y=δi cosαα——定位基准变动方向与工序尺寸方向间的夹角。
计算基准位移误差的关键是求出定位基准的最大变动量δi。
3.3.3基准不重合误差与基准位移误差的合成当工件以各种方法定位时,可能会同时存在基准不重合误差和基准位移误差,定位误差是由这两项组合而成的,即△D = |△Y ±△B | 。
“+”和“-”可按如下原则判断:⑴ 当工序基准不在定位基面上时 ,取 “ + ” ,即 △D =△Y +△B⑵当工序基准在定位基面上时,以工序尺寸方向为参考方向,确定方法如下: 如果工序基准和定位时的接触点分布在定位基准异侧, 则取“+”,即△D =△Y +△B 如果当工序基准和定位时的接触点分布在定位基准同 侧, 则取“-”,即△D = |△Y -△B | 下面用组合方法求解前述实例。
[解] ⑴ 尺寸 H 的工序基准为外圆柱面φd 正下方的母线(点 C ),工序尺寸 H 为垂直方向。
此定位方式的定位基 准为轴心线(点 O )(图 2)。
定位基准与工序基准不重合。
基准不重合误差为定位基准(点 C )与工序基准(点 O )之间尺寸的公差值。
⑵ 当φd 变化时,定位基准轴心线(点 O )的位置会上下移动,如图 2所示,当直径为 d max 时,定位基准位置最高为点 O 1;直径为 d min 时,定位基准位置最低,为点 O 2。
两 者间的距离即为基准位移误差 Y 。
图2工件在V 形块上定位工序基准选在工件下母线⑶ 由基准不重合误差与基准位移误差合成的定位误差。
工序基准在定位基面上,以工序尺寸方向(垂直方向) 为参考方向,工序基准(点 C )和定位时的接触点(点 B ) 分布在定位基准同侧, 因此,取△D = |△Y -△B |)71(2sin22sin 2sin 2minmax 21-=-=-= a a d x a d AO AO Y d δ)(6-121d B δ=4结束语本文用几何法、微分法以及组合法对同一问题进行求解,目的就是了解、学习、探索、求证定位误差的计算方法。