装载机铲斗几何尺寸的新计算方法
课程设计--ZL20装载机反转连杆机构工作装置的设计

目录一、装载机工作装置介绍 --------------- 1二、铲斗的设计------------------------- 22.1 铲斗的介绍--------------------- 22.2 铲斗的断面形状和基本参数的确定 ------------------------------------ 42.3 斗容的计算--------------------- 72.4 斗铰点位置的确定 ------------- 9三、动臂的设计------------------------ 103.1 动臂长度---------------------- 103.2 动臂铰点的确定--------------- 10四、反转斗连杆机构的设计------------ 124.1 斗四连杆机构的设计---------- 124.2 运动学与动力学分析---------- 134.3 程序代码: --------------------- 184.4 运行结果: --------------------- 194.5 ZL20装载机参数-------------- 254.6 转斗缸四连杆设计 ------------ 25五、心得体会------------------------- 26六、参考文献------------------------ 26一、装载机工作装置介绍装载机的工作装置是由铲斗、升降动臂的液压缸、连杆机构组成,用以完成铲掘、装载作业。
对中小型装载机,一般还常配有可以更换的工作装置,以适应多种作业的需要。
装载机工作装置应满足如下要求:1.铲斗的运动轨迹符合作业要求,即要满足铲掘、装载的要求;2.要满足卸载高度和卸载距离的要求,并保证动臂在任何位置都能卸净铲斗中的物料;3.在满足作业要求的前提下,工作装置结构简单,自重轻、受力合理、强度高;4.保证驾驶员具有良好的工作条件,确保工作安全,视野良好,操作简单和维修方便。
土方开挖体积公式
土方开挖体积公式
V=A*h
其中,V代表土方开挖的体积,A代表挖掘区域的横截面积,h代表挖掘区域的深度。
以此公式为基础,可以根据项目的实际情况进行具体的计算。
要计算土方开挖的体积,首先需要确定挖掘区域的横截面形状。
常见的挖掘形状有平面形、梯形、楔形等。
不同的挖掘形状需要使用不同的公式进行计算。
以平面形为例,当挖掘区域的横截面为矩形时,可以使用以下公式计算体积:
V=l*w*h
其中,l代表矩形的长度,w代表矩形的宽度,h代表挖掘区域的深度。
通过测量或估算这些参数的值,就可以计算出土方开挖的体积。
当挖掘区域的横截面为梯形时,可以使用以下公式计算体积:
V=(A1+A2)*h/2
其中,A1和A2分别代表梯形的上底和下底的面积,h代表挖掘区域的深度。
当挖掘区域的横截面为楔形时,可以使用以下公式计算体积:
V=A*h/3
其中,A代表楔形的面积,h代表挖掘区域的深度。
需要注意的是,以上公式仅适用于简单的挖掘形状。
对于复杂的挖掘形状,可以将其分解为多个简单形状,并采用相应的公式进行计算,然后将各个部分的体积相加即可得到总体积。
此外,实际土方开挖的体积可能受到多种因素的影响,例如倾斜度、土壤含水量、岩石硬度等。
在计算土方开挖体积时,需要根据实际工程情况进行修正,以获得更准确的结果。
总之,土方开挖体积公式是工程建设中常用的计算工具,能够帮助工程师和施工人员快速准确地计算土方开挖的体积,为工程施工提供参考依据。
通过合理应用土方开挖体积公式,可以提高工程施工效率,减少浪费和成本,从而实现经济、高效的土方开挖工程。
挖掘机 工作装置各部分的基本尺寸计算和验证
三、工作装置各部分的基本尺寸计算和验证 反铲装置的合理设计问题至今尚未理想地解决。
以往多按经验,采取统计和作周试凑的方法,现在则尽可能采用数解分析方法。
液压挖掘机基本参数是表示和衡量挖掘机性能的重要指标,本文主要计算和验证铲斗、动臂、斗杆的尺寸。
(一)反铲装置总体方案的选择反铲装量总体方案的选择包括以下方面: 1、动臂及动臂液压缸的布置 确定用组合式或整体式动臂,以及组合式动臂的组合方式或整体式动臂的形状动臂液压缸的布置为悬挂式或是下置式。
2、斗杆及斗杆液压缸的布置确定用整体式或组合式斗扦,以及组合式斗杆的组合方式或整体式斗扦是否采用变铰点调节。
3、确定动臂与斗杆的长度比,即特性参数112K l =。
对于一定的工作尺寸而言,动臂与斗杆之间的长度比可在很大范围内选择。
—般当K 1>2时(有的反铲取K 1>3)称为长动臂短斗杆方案,当K 1<1.5时属于短动比长斗杆力案。
K 1在1.5~2之间称为中间比例方案。
要求适用性较强而又无配套替换构件或可调结构的反铲常取中间比例方案。
4、确定配套铲斗的种类、斗容量及其主参数,并考虑铲斗连杆机构传动比是否需要调节。
5、根据液压系统工作压力、流量、系统回路供油方式、工厂制造条件等确定各液压缸缸数、缸径、全伸长度与全纳长度之比λ。
考虑到结构尺寸、运动余量、稳定性和构件运动幅度等因素一般取λ1=1.6~1.7。
取λ2=1.6~1.7;λ3=1.5~1.7。
(二) 斗形主要参数的确定当铲斗容量q 一定时,挖掘转角2ϕ,挖掘半径R 和平均斗宽B 之间存在一定的关系,即具有尺寸R 和B 的铲斗转过2ϕ角度所切下的土壤刚好装满铲斗,于是斗容量可按下式计算:21(2sin 2)2s q R B K ϕϕ=-(4.1)式中:s K ——土壤松散系数。
(取 1.25s K = )一般取:(4.2)R 的取值范围:(4.3)式中: q ——铲斗容量,3m ; B ——铲斗平均宽度,m 。
装载机铲斗几何形状参数优化设计
装载机铲斗几何形状参数的优化设计关键词:装载机,铲斗,几何形状,尺寸参数,优化设计轮式装载机的工作装置主要由动臂、铲斗、摇臂、连杆等机构组成,工作装置的结构和性能直接影响装载机的动力性与运动特性;铲斗是工作装置的重要工作部件,其几何形状和尺寸参数对插入阻力、铲取阻力、转斗阻力和生产率有着很大的影响,为保证铲斗在一次装载过程中具有较高的装满系数,达到装满卸净,并且减小工作阻力,为此要求铲斗结构形状和尺寸参数必须符合一定的设计规范。
装载机铲斗的动力性主要体现在铲斗下铰接点位置的确定,铲斗下铰接点与切削刃的距离定义为铲斗的回转半径Rr,因此在铲斗几何形状设计过程中,以铲斗的回转半径为主参数,以铲斗的截面各几何形状参数和铲斗下铰接点的位置参数作为回转半径Rr的函数。
铲斗的斗容量分为平装斗容和堆装斗容,额定斗容量是指堆装斗容,并且斗容量已经实现系列化,本优化设计软件可以实现任意斗容量的优化设计。
铲斗的斗容量由铲斗的截面形状和内侧宽度B0决定,而铲斗的宽度一般比两轮胎外侧之间距离长100mm左右,以保护轮胎不受损害,因此铲斗内侧宽度是一个相对固定值,设计时一般根据实际需要预先给出一个具体数值,因而铲斗的设计主要是铲斗的截面几何形状参数的确定。
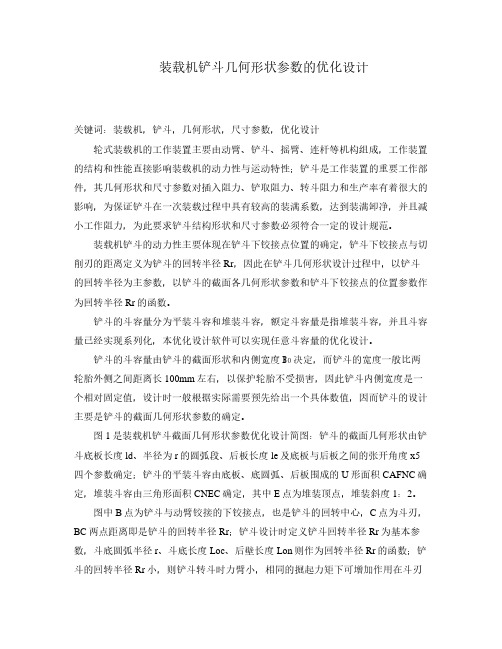
图1是装载机铲斗截面几何形状参数优化设计简图:铲斗的截面几何形状由铲斗底板长度ld、半径为r的圆弧段、后板长度le及底板与后板之间的张开角度x5四个参数确定;铲斗的平装斗容由底板、底圆弧、后板围成的U形面积CAFNC确定,堆装斗容由三角形面积CNEC确定,其中E点为堆装顶点,堆装斜度1:2。
图中B点为铲斗与动臂铰接的下铰接点,也是铲斗的回转中心,C点为斗刃,BC两点距离即是铲斗的回转半径Rr;铲斗设计时定义铲斗回转半径Rr为基本参数,斗底圆弧半径r、斗底长度Loc、后壁长度Lon则作为回转半径Rr的函数;铲斗的回转半径Rr小,则铲斗转斗时力臂小,相同的掘起力矩下可增加作用在斗刃上的掘起力,yb是铲斗的下铰接点与底板ld的距离,yb数值小,有利于作业时的铲入,减少插入阻力。
挖掘机-工作装置各部分的基本尺寸计算和验证

三、工作装置各部分的基本尺寸计算和验证反铲装置的合理设计问题至今尚未理想地解决。
以往多按经验,采取统计和作周试凑的方法,现在则尽可能采用数解分析方法。
液压挖掘机基本参数是表示和衡量挖掘机性能的重要指标,本文主要计算和验证铲斗、动臂、斗杆的尺寸。
(一)反铲装置总体方案的选择反铲装量总体方案的选择包括以下方面:1、动臂及动臂液压缸的布置确定用组合式或整体式动臂,以及组合式动臂的组合方式或整体式动臂的形状动臂液压缸的布置为悬挂式或是下置式。
2、斗杆及斗杆液压缸的布置确定用整体式或组合式斗扦,以及组合式斗杆的组合方式或整体式斗扦是否采用变铰点调节。
3、确定动臂与斗杆的长度比,即特性参数K1 l1 l2 。
对于一定的工作尺寸而言,动臂与斗杆之间的长度比可在很大范围内选择。
—般当K1> 2时(有的反铲取K1>3)称为长动臂短斗杆方案,当K1<1.5 时属于短动比长斗杆力案。
K1在1.5~2 之间称为中间比例方案。
要求适用性较强而又无配套替换构件或可调结构的反铲常取中间比例方案。
4、确定配套铲斗的种类、斗容量及其主参数,并考虑铲斗连杆机构传动比是否需要调节。
5、根据液压系统工作压力、流量、系统回路供油方式、工厂制造条件等确定各液压缸缸数、缸径、全伸长度与全纳长度之比λ。
考虑到结构尺寸、运动余量、稳定性和构件运动幅度等因素一般取λ1=1.6~1.7。
取λ2=1.6~1.7;λ3=1.5~1.7。
(二)斗形主要参数的确定当铲斗容量q 一定时,挖掘转角2 ,挖掘半径R和平均斗宽B 之间存在一定的关系,即具有尺寸R和B 的铲斗转过2 角度所切下的土壤刚好装满铲斗,于是斗容量可按下式计12q R2B(2 sin2 )K s算:2(4.1)式中:K s ——土壤松散系数。
(取K s 1.25 )一般取: (1.0~1.4) 3q (4.2)R的取值范围:(1.3~1.6) 3q (4.3)式中:q ——铲斗容量,m3;B ——铲斗平均宽度,m。
挖掘机工作装置各部分的基本尺寸计算和验证
三、工作装置各部分的基本尺寸计算和验证反铲装置的合理设计问题至今尚未理想地解决。
以往多按经验,采取统计和作周试凑的方法,现在则尽可能采用数解分析方法。
液压挖掘机基本参数是表示和衡量挖掘机性能的重要指标,本文主要计算和验证铲斗、动臂、斗杆的尺寸。
(一)反铲装置总体方案的选择反铲装量总体方案的选择包括以下方面: 1、动臂及动臂液压缸的布置确定用组合式或整体式动臂,以及组合式动臂的组合方式或整体式动臂的形状动臂液压缸的布置为悬挂式或是下置式。
2、斗杆及斗杆液压缸的布置确定用整体式或组合式斗扦,以及组合式斗杆的组合方式或整体式斗扦是否采用变铰点调节。
3、确定动臂与斗杆的长度比,即特性参数112K l l 。
对于一定的工作尺寸而言,动臂与斗杆之间的长度比可在很大范围内选择。
—般当K 1>2时(有的反铲取K 1>3)称为长动臂短斗杆方案,当K 1<1.5时属于短动比长斗杆力案。
K 1在1.5~2之间称为中间比例方案。
要求适用性较强而又无配套替换构件或可调结构的反铲常取中间比例方案。
4、确定配套铲斗的种类、斗容量及其主参数,并考虑铲斗连杆机构传动比是否需要调节。
5、根据液压系统工作压力、流量、系统回路供油方式、工厂制造条件等确定各液压缸缸数、缸径、全伸长度与全纳长度之比λ。
考虑到结构尺寸、运动余量、稳定性和构件运动幅度等因素一般取λ1=1.6~1.7。
取λ2=1.6~1.7;λ3=1.5~1.7。
(二) 斗形主要参数的确定当铲斗容量q 一定时,挖掘转角2ϕ,挖掘半径R 和平均斗宽B 之间存在一定的关系,即具有尺寸R 和B 的铲斗转过2ϕ角度所切下的土壤刚好装满铲斗,于是斗容量可按下式计算:21(2sin 2)2s q R B K ϕϕ=-(4.1)式中:s K ——土壤松散系数。
(取 1.25sK = )一般取: B=(1.0~1.4)3q(4.2)R 的取值范围:R=(1.3~1.6)3q(4.3)式中: q ——铲斗容量,3m ;B ——铲斗平均宽度,m 。
方形钢煤斗计算书
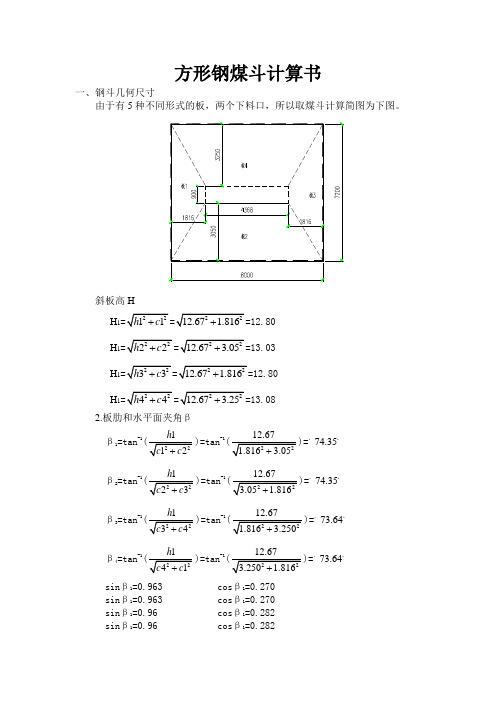
方形钢煤斗计算书一、钢斗几何尺寸由于有5种不同形式的板,两个下料口,所以取煤斗计算简图为下图。
斜板高HH1H1=13.03H1H1=13.082.板肋和水平面夹角ββ1=tan-1)=tan-1)=。
74.35。
β2=tan-1)=tan-1)=。
74.35。
β3=tan-1)=tan-1)=。
73.64。
β4=tan-1)=tan-1)=。
73.64。
sinβ1=0.963 cosβ1=0.270sinβ1=0.963 cosβ1=0.270sinβ1=0.96 cosβ1=0.282sinβ1=0.96 cosβ1=0.2823.贮仓总体积:(双口时的实际体积分为3部分,即实际容积)V31= V32=16h[(2a2+a1)b2+(2a1+a2)b1]=4.56[(2X3.138+0.9)X2.829+(2X0.9+3.138)X0.9]=18.6m3V2=16h[(2a2+a1)b2+(2a1+a2)b1]=8.176[(2X8+5.685)X7.2+(2X5.685+8)X3.138]=295.5m3V1=a2b2h2=8X7.2X1.2=69.12 m3总体积V=37.2+295.5+69.12=401.82 m3 (2).斗2容积:V=V1+V2=7.2X8X1.2+12.676[(2X8+4.368)X7.2+(2X4.368+8)X0.9]=410.62m3 5.各板与水平面夹角板1.Φ1=tan-1(11hC)=t an-1(12.671.816)=81.843。
板2.Φ2=tan-1(11hC)=t an-1(12.673.05)=76.465。
板3.Φ3=tan-1(11hC)=t an-1(12.671.816)=81.843。
板4.Φ4=tan-1(11hC)=t an-1(12.673.250)=75.613。
sinΦ1=0.990 cosΦ1=0.142sinΦ2=0.972 cosΦ2=0.234sinΦ3=0.990 cosΦ3=0.142sinΦ4=0.969 cosΦ4=0.248二.斗壁内力计算1.钢斗重量:钢斗自重:假定110kg/m31.1X401.82X1.2=530.4KN钢斗总重:1.3X401.82X9+530.4=5232KN (以上为实际重量)计算简图下的重量:钢斗自重:假定110kg/m31.1X410.62X1.2=640.57KN钢斗总重:1.3X410.62X9+640.57=5445KN2.钢斗壁压力:垂直壁上的压力:当h=1.2m时,P=nγhk=1.3X9X1.2X0.333=4.68KN/m2斜壁上的法向压力:各板m计算:板1:m=cos2Φ1+ksin2Φ1=0.347板2:m=cos2Φ2+ksin2Φ2=0.370板3:m=cos2Φ3+ksin2Φ3=0.347板4:m=cos2Φ4+ksin2Φ4=0.374MAXm=0.374, 取板4进行计算,且板2的sinΦ最小,拉力最大。
装载机结构三维造型与仿真
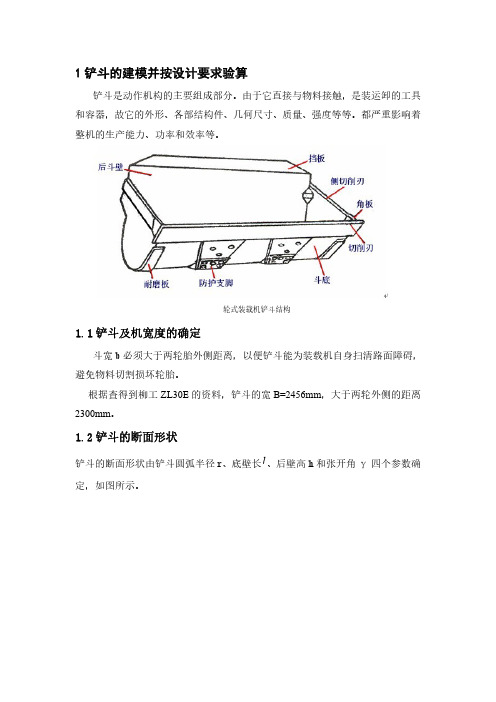
1铲斗的建模并按设计要求验算铲斗是动作机构的主要组成部分。
由于它直接与物料接触,是装运卸的工具和容器,故它的外形、各部结构件、几何尺寸、质量、强度等等。
都严重影响着整机的生产能力、功率和效率等。
轮式装载机铲斗结构1.1铲斗及机宽度的确定斗宽b必须大于两轮胎外侧距离,以便铲斗能为装载机自身扫清路面障碍,避免物料切割损坏轮胎。
根据查得到柳工ZL30E的资料,铲斗的宽B=2456mm,大于两轮外侧的距离2300mm。
1.2铲斗的断面形状铲斗的断面形状由铲斗圆弧半径r、底壁长l、后壁高h和张开角γ四个参数确定,如图所示。
铲斗断面基本参数圆弧半径r越大,物料进入铲斗的流动性越好,有利于减少物料进入斗内的阻力,卸料时干净而且快捷。
但r过大,斗的开口较大时,不易装满,而且铲斗外形较高,将影响驾驶员观察铲斗斗刃的工作情况。
后壁h是指铲斗上缘至圆弧与后壁切点间的距离。
底壁长l是指斗底壁的直线段长度。
l长则铲斗铲入料堆深度大,斗易装满.但掘起力将由于力臂的增加而减小,插入的阻力也将随铲斗铲入料堆的深度而急剧增加。
l长亦会减小卸载高度。
l短则掘起力大,且由于卸料时铲斗刃口降落的高度小,还可减小动臂举升高度,缩短作业时问,但这会减小斗容。
铲斗张开角γ为铲斗后壁与底壁间的夹角,一般取45°~52°。
适当减小张开角并使斗底壁对地面有一定斜度,可减小插入料堆时的阻力,提高铲斗的装满程度。
1.3铲斗基本参数的确定设计时,把铲斗的回转半径R(即铲斗与动臂铰接点至切削刃之间的距离)作为基本参数,铲斗的其他参数则作为R的函数。
R是铲斗的回转半径(见图1-7),它的大小不仅直接影响铲斗底壁的长度,而且还直接影响转斗时掘起力及斗容的大小,所以它是一个与整机总体有关的参数。
铲斗的回转半径尺寸可按下式计算。
(1-1)式中 Vr—铲斗的额定容量,m³;—铲斗的内侧宽度,为铲斗宽度扣除两侧壁厚δλg—铲斗的斗底长度系数,λg=1.40~1.5;λz—后斗壁的长度系数,λz=1.1~1.2;λk—挡板的高度系数,λk=0.120.14;λr—斗底和后斗臂直线间的圆弧的半径系数,λr==0.35~0.4;γ—张开角,为45°~52°;γ1—挡板与后斗壁间的夹角,选择γ1时应使侧壁切削刃与挡板的夹角为90°。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
— ’( — 万方数据
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"
关键词:铲斗 设计方法 基本参数
法能直观反映基本参数对铲斗形状的影响, 更便于利用微机进行辅助设计。
—— 通常取 "#5$8"#7 !0—圆弧半径系数, !06’ ( ! , —— ’ —铲斗圆弧半径, 4 —— 取 79:8$1: "—斗张角, —— 通常 "!—挡板与后斗壁延长线之间的夹角, 取 $:8!": 求出 ! 后, 再根据各项选取的系数来确定铲斗 的几何尺寸 & %、 & &、 & ( 与 ’ 等。
相似文献(10条) 1.学位论文 彭灿 液压挖掘机铲斗轨迹控制器SOC原型研究 2007
当今液压挖掘机机器人化已成为国内外研究的热点,并在实际应用中逐步体现出其优势。本文在此背景下,结合最新出现的片上系统(SOC)技术,对液压挖掘 机铲斗轨迹控制器原型进行了研究。 论文首先对液压挖掘机运动学进行了分析,考虑到采用数字PID控制方法会导致参数调节难度大的缺点,选取基于递推 增量控制的轨迹控制算法。在实际控制中液压挖掘机的减压比例阀动态特性可以忽略,因而得到减压比例阀近似电流-流量模型,为半实物仿真中电流到工作装置 状态转化提供了理论基础。 轨迹控制器本质上属于运动控制器,其设计上采用SOC技术相比传统的嵌入式开发,具有更低的功耗,更高的性价比和更快的上 市时间,能提高系统整机的性能,降低了成本和体积。常见的SOC设计方法有基于IP核和基于平台两种,本文对两种方法进行了对比,指出采用基于平台的设计方 法,在完全可编程环境下既具有基于平台设计方法的降低设计复杂度的优点,又具有基于IP核设计方法的高灵活性。 通过上述分析,本文采用基于平台的 SOC设计方法,对液压挖掘机轨迹控制器进行研究。在Altera,公司推出的可编程平台Stratix开发板(可配置Nios Ⅱ软核CPU)上实现了轨迹控制器原型系统 :Excavator Controller。根据实际控制需求,采用软硬件协同设计的方法,在SOC开发环境中研究和设计了相关IP核,并将各IP核最终都综合到软核CPU Nios Ⅱ中,从而Excavatoi Controller将控制器的绝大部分功能在单个芯片上实现,具有低功耗、小体积等优点。在软件设计中编写了各功能函数和递推增量控制算法 程序。为了提高控制的实时性,在系统中移植了μC/OS-Ⅱ嵌入式操作系统进行多任务管理。 最后论文采用Visual C++6.0基于OpenGL开发了液压挖掘机虚拟 现实VR软件,与轨迹控制器原型共同组成半实物仿真环境。在半实物仿真环境下,对轨迹控制器进行了水平从外向内走直线的实验,通过不断的调整控制参数,最 终达到较好的控制效果。
!!!"
! 引言
装载机铲斗的几何形状与尺寸按原来的设计 方法是把铲斗的回转半径 ! (铲斗下铰点到切削刃 的距离) 作为基本参数 (如 图 ! 所 示 ) , 该参数不仅 影响掘起力和插入阻力的大小, 而且与整机的总体 参数有关, 因此铲斗的其它参数则视为 ! 的函数。
回转半径 ! 可按下式计算:
!"{ # %${ "#$!%%!&’!()*+"!,+-."/![)2%3" %1,/"#$#3!/ !%&1 } } " % #, ] 34, 3!, 5 式中: # ——平装斗容, 4 —铲斗净宽, —— $ 4 —— 通常取 !#78!#$ !%—斗底长度系数, !%6& % %! , —— 指切削刃至斗底与后斗壁延长 & %—斗底长, 线交点之距离, 4 —— 通常取 !#!8!#1 !&—后斗壁长度系数, !&6&&%! , —— 指后斗壁上缘至斗底与后斗 & &—后斗壁长, 壁延长线交点之距离, 4 通常取 "#!18"#!7 !(——挡板高度系数, !(6&(%! , —— & (—挡板高度, 4
工程机械, ($! ) !""# 图 ! 计算程序框图
万方数据
— 7#$# !#) , , ! !" "!"! ! %&’#( $ 为平 ! ! ! %!" )
(! ) * 一定时, !( 对 ( 无影响。 (#) * 一定, ) 增加时, ( 迅速减小, #、 ’ 迅速增大。 () ) * 一定, !! 增加时, (、 ’ 略减。
工程机械, ($!) !""#
装载机铲斗几何尺寸的新计算方法
作者: 作者单位: 刊名: 英文刊名: 年,卷(期): 引用次数: 张维良, 申文清, 张艳伟 华北水利水电学院 工程机械 CONSTRUCTION MACHINERY AND EQUIPMENT 2002,33(12) 0次
参考文献(3条) 1.周复光 铲土运输机械设计与计算 1986 2.同济大学 铲土运输机械 1987 3.吉林工业大学工程机械教研室 轮式装载机设计 1982
1 原设计方法存在的问题
(! ) 将回转半径 ! 视为基本参数, 其它尺寸均 为 ! 之函数是不够合理的。因为 ! 只是设计装载 机工作装置时所需的主要尺寸, 其值应根据铲斗结 构尺寸与动臂下铰点处的结构强度而定, 不应视为 铲斗基本参数。 (1 ) 铲斗尺寸通过许多系数计算而得, 系数过 多, 不便于分析它们对铲斗形状的影响, 不便于试验研
364
铰点距斗底的距离约为 ! $ - ,故铲斗的回转 半径 / 为:
"%$ $ "%$ { [$ ( ! $ *" ) } /"{ ’$* $-+-$] *$-$} "%$ $ $ "%$ { [(!06$+-4] } ){ ’$& *$- } 3+4
384
! 设计举例
在为某工程机械大修厂的 9:$( 装载机改修过
摘 要: 为了推进整机产品标准的改革, 分析了中国加入 ()* 后产品市场的竞争
!!"
变化, 明确了市场经济以客户为中心的发展方向, 提出了产品标准的具体改革方法。
在中国经济发展的过程中,工程机械产品经过 数十年的努力已经完成了以产品为中心和以市场为 中心的发展阶段。随着中国加入 ()* , 中国经济已 经同开放竞争的世界市场接轨,工程机械产品的发 展正逐渐转移到以客户为中心的发展阶段,这就对 中国工程机械产品标准的发展提出了新的课题和要 求。
#+ 以产品为中心的产品标准
在中国工程机械发展的初期, 原机械工业部、 建 设部及下属的各归口所根据收集到的国外资料, 结 合中国国情, 制定了一批工程机械的产品型式、 参数 和技术条件等方面的国家或行业标准。这些标准的 出台, 促进了中国工程机械的发展, 使中国工程机械 — &" — 万方数据
) 吉林工业大 学 工 程 机 械 教 研 室&
北京: 中国建筑工业出版社, !*+#
轮 式 装 载 机 设 计&
通讯地址: 河北省邯郸市华北水电学院 !"## 信箱 ($#%$!& ) (收稿日期: #((#0(-0)( )
广西柳工集团有限公司 章二平
林建荣
!!"
++
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"
图 ! 新算法铲斗形状及参数
侧刃倾角 !" 对水平切削阻力无影响, 考虑 (/ ) 到铲斗在最大举升高度与最大上翻角时应使斗面近 于水平, 以减少物料的撒落并增大漏斗系数, 因此取
(! ) 挡板高度系数 !"# " # $ 。 由图 $ 可知: (!( %$) (!( %$ ) ) (+) ($ ) % "#&$%&’ )( $ ’*%&’ 根据正弦定理得: (,-.!" %,-.!$) (+) (/ ) () % (,-.!( %,-.!$) (+) (! ) )) % $ 侧面积 *)(01% (,-.!(*(01# ")+$ %&’ (!( % $ ) * $ $ (!( %" ) ] (+ ) (1 ) (01"$["2 $ [’*%&’3!( %$4 ]3,-.!(,-.!"4 %&’(!!) $"{ * %{ (01 (!( %! ) ] (!+ %! ) *+,-!,-.!( %&’(![ ./01 2+,-" ! ’ *%&’ $%! ($.!+ %" ) } } 345 365 式 (- ) 中, 面积 * 可由 *", %(( 确定 (, 为平装斗 容, 。 (( 为铲斗净宽) 挡板高度系数定义为: [’*%&’ (!$ %!) ] !"# " %$) (&’(!+ %&’(!!) 01!7 385 下铰点的位置主要由结构强度设计而定, 其原 则是: 使该点尽量靠近铲斗的后壁和斗底, 但又要 保证该点处有足够的强度。铲斗结构尺寸确定后, 影响下铰点位置的主要因素是装载机的额定载重 量、 动臂钢板厚度及装载机的牵引力等。为确定下 铰点的位置, 将 9:#+59:-+ 下铰点距斗后壁之间的 距离 - 与额定载重量 . 的关 系 回 归 为 如 下 经 验 公 式:
参 考 文 献 水利 ! 周复光主编 & 铲 土 运 输 机 械 设 计 与 计 算 & 北 京 : 电力出版社, !*+中国建筑工业 # 同济大学主 编 & 铲 土 运 输 机 械 & 北 京 : 出版社, !*+,