基于PLC_控制的液压控制系统
基于PLC的液压机控制系统设计

基于PLC的液压机控制系统设计刘俊,李文(大连交通大学电气信息学院,辽宁大连116028)摘 要:针对传统液压机控制系统的不足,为使其拥有更好的性能和人性化操作界面,构建了基于PLC与工业触摸屏的电气控制系统整体结构,设计采用三菱FX1N PLC作为主控核心,实现的功能分别为与上位机的数据交换,对液压机外围硬件电路以及内部阀体控制和对压力、位移、温度的数据检测。
并给出相应的PLC程序及部分上位机界面设计。
应用结果表明,与传统设计相比,该系统既可以实现自动优化运行,又可以满足手动控制的操作要求,提高了工作效率,是机电一体化的典型应用。
关键词:液压控制;电气控制;可编程逻辑控制器;数据检测;人机界面中图分类号:TH137;TM57 文献标志码:B 文章编号:1671 5276(2011)01 0157 04Control Syste m Design of Hydraulic Press Based on PLCL I U Jun,L IW en(E l e ctrica l and Infor m a tion I nstit u t e,Da lian Jiao t ong Un ive rsity,Da li a n116028,Ch ina)Abstrac t:To m ake up f or t he short age in t he traditional control sys t e m f or hydr auli c pr ess,t his paper constructs t he overall s truc t ure of e l e ctrical contr o l sys t e m based on PL C and indus trial touch screen.I n or der t o m ake t his sys t e m has bett er perf or mance and hu manized operati o n int erf ace,M it sub i s hi FX1N PLC is used as the core t o rea lize its f unction data exchange w ith PC,t he contro l of the peripheral hard w ar e c ircuits and int ernal valves,and t he data de t ec tion i n t he pressure,displace ment and t e mperat ure.And ita lso of f ers the des i g n o f t he corr espond i n g PL C procedure and part o f t he PC int erf ace des ign.Runn i n g result sho w s that co m pared w ith t he trad iti o nal des ign,the syst em not on l y can r eali z e the aut omatic op tm i al oper a ti o n,but also can mee t t he perf or mance require ment s f or manual contr o l and m i prove work effi c iency.This is a typica l appli c ati o n ofmechanical and elec trica l int egrati o n.K ey word s:hydraulic contr o;l e l e ctrical contro;l PL C;dat a det ecti o n;HM I(H u manM achine Int erf ace)0 引言转向架可以说是铁道车辆上最重要的部件之一,它直接承载车体质量,保证车辆顺利通过曲线。
基于PLC的液压自动控制系统创新实验研究

实验 ,有 着社会 实践 上的价值 和意义 。本文结合 教学经验 ,将两者结 合起来进行 创新实验 ,
获得了良好的教学效果。通过这项实验 ,不仅加强了学生的知识运用能力和创新精神的培
养 ,而且还加强了学生独立的面对问题和 解决 问题 的能力。 关键词 : P C;液压传动 ;创新实验 L 中圈分类号 :T 2 3 P 7 文献标 识码 :A 文章编 号 :1 0 - 14 2 1 ) 8 上) 0 3 0 9 0 ( 0 0 ( -0 7 - 2 0 3 2
相互 交叉 和 联 系起来 ,进 行分 析 研究 和 应用 。P C L 液 压 技 术 在 高 校 教 学 中结 合 起 来 进 行 实 验 ,有 助
于 学 生 充 分 的 联 系 自己 的 知 识 和 能 力 ,并 将 其 融
会 贯 通 起 来 ,解 决 一 些社 会 发 展 中所 出现 的 一 些 实 际 的 问 题 。 同 时 ,还 可 以加 强 学 生 对 于 多种 技
1
l 似 I 8
基于P C L 的液压 自动控制 系统创新实验研究
I nno vaton e i xperm ent r i esear ch ofhydr aulc aut i om aton i
cont oIs t r ys em bas ed C on PL
11 实验器材的准备 . 实 验器材 的准 备对 于实验 的顺利 进行 来说 , 有 着 非 常 重 要 的 作 用 。在 实 验 的 开 始 阶 段 ,对 实 验 器 材 的准 备 ,主 要 包 括 液 压 元 件 ,P C 以及 一 L 些开 关 按 钮 、 电 源模 块 等 。这 些器 材 的 准 备 , 有
首 先 ,学 生 可 以通 过 自己 的知 识 能力 和 系统 ,
基于PLC的液压同步系统的程序设计方法

基于PLC的液压同步系统的程序设计方法在液压系统中,经常要求系统能控制处理多个执行机构同步运行的问题。
下面以笔者为国内某热电厂所设计的由一台PLC和四个电液比例阀组成的系统为例,说明同步系统的组成及程序设计方法。
一、系统组成系统由PLC、电流比例阀、齿轮双齿条油缸及转动执行机构等部分组成。
由PLC控制四个电液比例阀分别驱动四个齿轮双齿条油缸,带动四个执行机构转动。
控制要求规定:四个执行机构转动时,其转动速度应同步,最终的转动位置角度应相同。
系统的PLC选用Koyo SZ-4型产品,其各种模块安装在机架内的不同槽位上,I/O点的地址定义号由该模块所在的槽位决定,八槽机架所安装的模块类型及其地址定义号如图1所示。
图1系统的开关量输入模块选用8ND1型和16ND1型24VDC模块,它们的地址号为1010 ~1077,共56点。
主要用来连接按钮输入信号和接收绝对式旋转编码器发生的编码信号。
开关量输出模块选用8TR1型24VDC模块,它的地址号为~010~Q017,主要用来连接各种指示灯。
模拟量输出模块的型号为2DA2,该D/A模块提供2路-10V~—+10V的输出电压。
Z-CTIF为高速计数模块,该模块用于接收增量式旋转编码器发来的高速脉冲。
比例阀选用的是4WRZ16型先导式电液比例换向阀,其电源形式为直流24V,电磁铁名义电流为800mA。
由PLC输出的-10V~+10V电压控制功率放大器输出-800mA~+800m A电流,输出电流的大小决定了电液比例阀阀口的开度。
系统选用Koyo TRD-NA360PW绝对式旋转编码器作为执行机构转动角度检测反馈元件。
当电液比例阀驱动齿轮双齿条油缸带动执行机构低速转动时,绝对式旋转编码器可将执行机构的转动位置角度实时反馈给PLC。
系统选用的增量式旋转编码器用于发出执行机构转动方向和转动角度大小的指令。
二、程序设计方法1、旋转编码器数据采集的编程方法图2为绝对式旋转编码器和增量式旋转编码器数据采集的部分程序。
基于PLC的四柱万能液压机液压系统设计

基于PLC的四柱万能液压机液压系统设计第1章绪论液压机简介液压机是利用液压油来传递压力的设备。
液压油在密闭的容器中传递压力时是遵循帕斯卡定律液压机的液压传动系统由动力机构、控制机构、执行机构、辅助机构和工作介质组成。
动力机构通常采用油泵作为动力机构,一般为容积式油泵。
为了满足执行机构运动速度的要求,选用一个油泵或多个油泵。
低压〔油压小于2.5MP〕用齿轮泵;中压〔油压小于6.3MP〕用叶片泵高压〔油压小于32.0MP〕用柱塞泵。
液压机通常指液压泵和液压马达,液压机和液压马达都是液压系统中的能量转换装置,不同的是液压泵把驱动电动机的机械能转换成油液的压力能,是液压系统中的动力装置,而液压马达是把油液的压力能转换成机械能,是液压系统中的执行装置。
液压系统中常用的液压泵和马达液压机都是容积式的,其工作原理都是利用密封容积的变化进行吸油和压油的。
从工作原理上来说,大部分液压泵和液压马达是互逆的,即输入压力油,液压泵就变成液压马达,就可输出转速和转矩,但在结构上,液压泵和液压马达还是有些差异的.液压机的维修:过盈配合的零件拆装采用锤敲、棍橇劳动强度大效率低且不安全,还容易打坏零件,以及用加热法操作困难、增加维修成本的缺点提供的,是在支架的顶部,安装有活塞杆竖直向下的液压油缸,活塞杆的下端安装有压头;支架上在活塞杆的下部,水平固定有工作台;与油泵连接的输油管通过换向阀与液压油缸连接。
用液压油缸的压力装卸零件,没有猛烈的锤击棍橇,不损坏零件,也不用加热耗能,安全可靠节能,安装精度高.液压机液压机简介:液压机由主机及控制机构两大部分组成。
液压机主机部分包括机身、主缸、顶出缸及充液装置等。
动力机构由油箱、高压泵、低压控制系统、电动机及各种压力阀和方向阀等组成。
动力机构在电气装置的控制下,通过泵和油缸及各种液压阀实现能量的转换,调节和输送,完成各种工艺动作的循环。
液压机的分类:利用帕斯卡定律制成的利用液体压强传动的机械,种类很多。
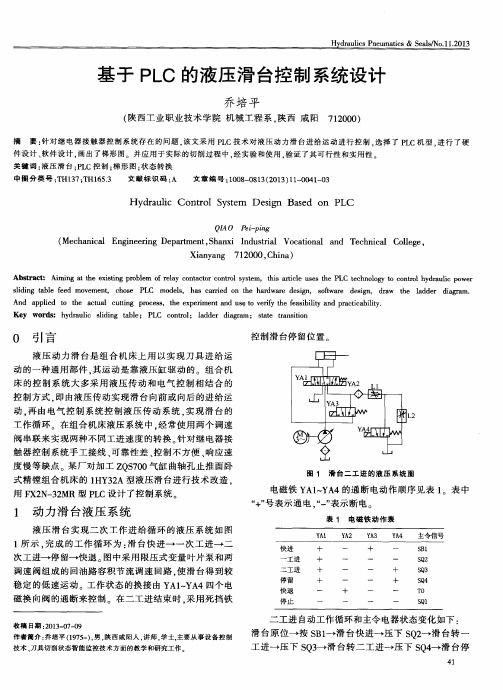
基于PLC的液压滑台控制系统设计
停留
快 退 停 止
+
一 一
—
—
‘
一
一
T O
一
一
S Q1
作者简介: 乔培平( 1 9 7 5 一 ) , 男, 陕西 咸阳 人, 讲师, 学士, 主 要从事设备控制 技术、 刀具切削 状态智能 监控技 术方面的 教学和研 究工作。
要: 针 对 继 电器 接 触 器 控 制 系 统 存 在 的 问题 , 该文采 用 P L C技 术 对 液 压 动 力 滑 台进 给运 动 进 行 控 制 , 选择 了 P L C机 型 , 进 行 了硬
件设计 、 软件设计 , 画 出 了梯 形 图 。并 应 用 于实 际 的切 削 过 程 中 , 经实验和使用 , 验 证 了其 可 行 性 和 实 用 性 。
^ 输一 、 一 l 2 l 2 3 4 3 4
2 P L C控 制设 计
2 . 1 P L C选择
目前 市 场上 的 P L C品种规 格众 多 .控 制功 能 也各 有特点 。综合 分 析液压 滑 台 的动 作要 求 , P L C需要 完成 的控 制功 能较多 . 控制精 度较 高 。系统共 需 开关量 输入 点 l 0个 , 开 关 量输 出点 4个 , 输入 、 输 出点 数 共 计 1 4 个. 并考 虑 整个 系 统 的经 济 和技 术指 标 . 考 虑到 今 后扩
表2 I / 0 分 配 端 口表
名称 起动
停止 原位
一
继 电器 名称
X l l 电磁 铁
输 出
Y A 1
继 电器
Y1 Y 2
X I 2 x 1 x 2
基于PLC仿型液压铣床控制系统的设计
毕业设计任务书设计题目:基于PLC仿型液压铣床控制系统的设计系部:机械工程系专业机械电子工程学号:学生:指导教师(含职称):专业负责人:1.设计的主要任务及目标把PLC技术应用于仿形液压铣床控制系统中,可以充分发挥PLC可靠性高、调试方便和使用灵活等优点。
根据对仿形液压铣床控制要求的分析,进行控制系统的设计、PLC的I/O点数确定、PLC的选型、PLC程序设计、模拟调试等。
2.设计的基本要求和内容1)分析控制要求,进行控制原理设计。
2)PLC选型及确定硬件配置。
3)设计控制程序,绘制梯形图。
4)程序调试(确定程序运行的软件)。
3.主要参考文献[1]袁任光,可编程序控制器(PC)应用技术与实例[M],广州:华南理工大学出版社,1997[2]廖常初,FX系列PLC编程及应用[M],北京:机械工业出版社,2005[3]徐健丰,徐丽珍,基于PLC的XA6132型卧式万能铣床改造[J],机械工程师,2005,11期[4]刘国光,陈文胜,PLC在XF716仿形铣床数控系统中的应用[J],新技术新工艺·机械加工与自动化,2002年,第4期[5]高云河,PLC在仿形铣床改造上的应用[J],黑龙江冶金,2005年第3期[6]毛洪泉,液压仿形铣床的数控化改造[J],内燃机,1994年,第4期[7]张万忠,可编程控制器入门与应用实例,中国电力出版社,2005年4.进度安排设计各阶段名称起止日期1 查阅相关文献资料,并撰写开题报告2012年02月27日至03月08日2 查阅所要仿形铣床控制要求及继电接触器电路解读2012年03月09日至04月01日3 PLC机型选择及硬件连接2012年04月02日至04月26日4 编写铣床PLC控制的程序2012年04月27日至05月30日5 整理毕业设计相关资料,准备答辩2012年05月31日至06月10日基于PLC仿型液压铣床控制系统的设计摘要:介绍铣床的定义及自动化铣床的发展和现状,详细的介绍了液压仿形铣床的工作原理并且以一维仿形为例详细的介绍了仿形铣床的工作过程及过程分析;PLC的特点(体积小,重量轻,能耗低可靠性高,抗干扰能力强;配套齐全,功能完善,适用性强易学易用,深受工程技术人员欢迎;系统的设计、建造工作量小,维护方便,容易改造)主要功能(步进顺序控制,数据处理,限时控制,条件控制,计数控制,模/数和数/模转换)以及PLC型号选择所要注意的事项(容量、I/O模块、电源模块、特殊功能模块、通信联网能力);根据仿形铣床的工作流程制作流程图,编写程序制作梯形图,绘制I/O地址分配图.关键词:仿形液压铣床,PLC,流程图,梯形图Based on the PLC imitation type hydraulic control system design Abstract:Describes the definition and automation of milling machine milling machine development and current situation, described in detail the working principle of hydraulic copy milling machine, and copying a one-dimensional case described in detail the process of copying the work of milling and process analysis; PLC characteristics (volume Small, light weight, low energy consumption, high reliability, strong anti-interference; fully furnished, perfect function, applicability and easy to use, welcomed by the engineering and technical personnel; system design, construction work is small, easy maintenance, easy transformation) the main function (step sequence control, data processing, limited control, conditional control, count controls, analog / digital and digital / analog conversion) and the PLC model to select the desired note (capacity, I / O module, power module special function modules, communication networking capabilities); copy milling machine according to the workflow flowcharts, programming production ladder, drawing I / O address assignment map.Key words:hydraulic copying milling machine, PLC,flow, Ladder目录1 引言 (1)2 发展现状 (3)2.1 铣床的介绍 (3)2.2 自动铣床的发展及现状 (3)3 整体设计 (5)4 硬件设计 (7)4.1 PLC的特点及主要功能 (7)4.1.1 PLC的一般特点 (7)4.1.2 PLC的主要功能 (8)4.2 PLC型号的选择 (9)4.2.1 根据PLC机型选择 (9)4.2.2 根据I/O模块选择 (10)4.2.3 根据存储容量选择 (11)4.2.4 根据I/O响应时间选择 (11)4.2.5 根据输出负载的特点选型 (11)4.2.6 根据在线和离线编程的选择 (12)4.3 液压仿形铣床行程分析 (12)4.3.1.仿形系统工作原理 (12)4.3.2.主轴电动机的控制 (16)4.3.3.进给运动的控制 (17)4.3.4.圆工作台的控制 (18)4.3.5.冷却泵电动机的控制与工作照明 (18)4.3.6.控制电路的联锁与保护 (19)4.4 PLC的I/O地址分配图 (19)4.5 PLC外部接线图 (20)5 PLC控制软件设计 (22)5.1系统工作流程图 (22)5.2梯形图 (23)6 总结 (25)参考文献 (26)致谢 (27)1 引言随着机电一体化技术的迅猛发展,数控机床的应用已日趋普及,机械制造业正在越来越多地采用数控技术来改善其生产加工方式,用以解决现代机械制造中结构复杂、紧密、批量小、多变零件的加工问题.然而,从目前企业面临的情况看,因数控机床价格昂贵,一次性投资较大,使有些企业难以承担.因此,对普通机床的数控化改造就显得非常必要,这种必要性主要体现在:数控机床可以加工出传统机床加工不出来的曲线、曲面等复杂的零件;可以实现加工的自动化,而且是柔性自动化,从而效率可比传统机床提高3~7倍;加工零件的精度高,尺寸分散度小,使装配容易,不再需要“修配”;可实现多工序的集中,减少零件在机床间的频繁搬运;拥有自动报警、自动监控、自动补偿等多种自律功能,因而可实现长时间无人看管加工.在我国的大多数制造行业和企业的生产、加工装备绝大多数是传统的机床, 而且半数以上是役龄在10年以上的旧机床.用这种装备加工出来的产品普遍存在质量差、品种少、档次低、成本高、供货期长,从而在国际、国内市场缺乏竞争力,直接影响一个企业的产品、市场、效益,影响企业的生存和发展.所以必须大力提高机床的数控化率.我国自改革开放以来,很多企业从国外引进技术、设备和生产线进行技术改造.据不完全统计,从1979—1988年间,全国引进技术改造项目就有18446项,大约165.8亿美元.这些项目中,大部分项目为我国的经济建设发挥了应有的作用.但是有的引进项目由于种种原因,设备或生产线不能正常运转,甚至瘫痪,使企业的效益受到影响,严重的使企业陷入困境.一些设备、生产线从国外引进后,有的消化吸收不好,备件不全,维护不当,结果运转不良;有的引进时只注意引进设备、仪器、生产线,忽视软件、工艺、管理等,造成项目不完整,设备潜力不能发挥,有的甚至不能启动运行,没有发挥应有的作用.种种原因使有的设备不仅没有创造财富,反而消耗着财富.这些不能使用的设备、生产线是个包袱,也是一批很大的存量资产,修好了就是财富.只要找出主要的技术难点,解决关键技术问题,就可以最小的投资盘活最大的存量资产,争取到最大的经济效益和社会效益.在美国、日本和德国等发达国家,他们的机床改造作为新的经济增长行业, 生意盎然,正处在黄金时代.由于机床以及技术的不断进步,机床改造是个“永恒”的课题.我国的机床改造业,也从老的行业进入到以数控技术为新的行业.在美国、日本、德国,用数控技术改造机床和生产线具有广阔的市场,已形成了机床和生产数控改造的新的行业,在美国,机床改造业称为机床再生 (Remanufacturing)业.从事再生业的著名公司有:Bertsche工程公司、ayton机床公司、Devlieg-Bullavd(得宝)服务集团、US设备公司等.美国得宝公司己在中国开办公司.我们提出的对普通铣床的数控改造是一个典型的铣床数控改造实例,对于改善生产环境,降低劳动强度,提高零件加工精度及自动化程度具有重要的意义, 可以创造一定的经济效益和社会效益.2发展现状2.1铣床的介绍铣床是以各类电动机为动力的传动装置与系统的对象以实现生产过程自动化的技术装置.电气系统是其中的主干部分,在国民经济各行业中的许多部门得到广泛应用.随着电子技术的发展,可编程序控制器日益广泛的应用于机械、电子加工与设备电气改造中.铣床作为机械加工的通用设备在内燃机配件的生产中一直起着不可替代的作用.自动铣床具有工作平稳可靠,操作维护方便,运转费用低的特点,已成为现代生产中的主要设备.自动铣床控制系统的设计是一个很传统的课题,现在随着各种先进精确的诸多控制仪器的出现,铣床控制的设计方案也越来越先进,越来越趋于完美,各种参考文献也数不胜数.在我国70~80年代大多数铣床中,大多数的开关量控制系统都是采用继电器控制,也有相当一部分辅机系统是采用继电控制.因此,继电器本身固有的缺陷,给铣床的安全和经济运行带来了不利影响,用PLC对铣床的继电器式控制系统进行改造已是大势所趋.2.2 自动铣床的发展及现状从上世纪80年代起铣床制造业的发展虽有起伏但对自动控制技术和自动铣床床一直给予不是很大的关注.经过九五自动车床和加工中心包括自动铣床的产业化生产基地的形成,所生产的中档普及型自动铣床的功能性能和可靠性方面已具有较强的市场竞争力.但在中高档自动铣床方面与国外一些先进产品相比仍存在较大差距.这是由于欧美日等先进工业国家于80年代先后完成了自动机床产业进程,其中一些著名机床公司致力于科技创新和新产品的研发引导着数控机床技术发展,如美国英格索尔公司和德国惠勒喜乐公司对用于汽车工业和航空工业高速数控铣床的发展日本牧野公司对高效精密加工中心所作的贡献,德国瓦德里希公司在重型龙门五面加工铣床方面的开发以及日本马扎克公司研发的车铣中心对高效复合加工的推进等等.相比之下,我国大部分数近代机床产品在技术处于跟踪阶段.随着科学技术的不断发展,生产工艺的不断发展改进,特别是计算机技术的应用,新型控制策略的出现,不断改变着电气控制技术的面貌.在控制方法上,从手动控制发展到自动控制;在控制功能上,从简单控制发展到智能化控制;在操作上,从策重发展到信息化处理;在控制原理上,从单一的有触头硬接线继电器逻辑控制系统发展到以微处理器或微型计算机为中心的网络化自动控制系统.X62W铣床综合了计算机技术、微电子技术、检测技术、自动控制技术、智能技术、通信技术、网络技术等先进的科学技术成果.工业、农业、科学和国防现代化建设要求机械产业不断地提供各种先进的设备.如电力机床、内燃机车、工程机械等设备.利用刀具对金属毛坯进行切削,从而加工出机械零件的工作机械称为金属切削机床,简称机床.机床是现代机械制造业中最重要的加工设备,在一般机械制造厂中,机床所担负的加工工作量约占机械制造总工作量的40%~~60%.机床的性能直接影响机械产品的性能、质量和经济性.因此,它是国民经济中具有战略意义的基础工业,机床的拥有量及其先进程度将直接影响到国民经济各部门生产发展和技术进步的能力.仿形铣床是由普通机床发展而来.它集于机械、液压、气动、伺服驱动、精密测量、电气自动控制、现代控制理论、计算机控制等技术于一体,是一种高效率、高精度能保证加工质量、解决工艺难题,而且又具有一定柔性的生产设备.仿形铣床的广泛应用,给机械制造业的生产方式、产品机构和产业机构带来了深刻的变化,其技术水平高低和拥有量多少,是衡量一个国家和企业现代化水平的重要标志.3 整体设计PLC控制液压泵电机、驱动主轴电机、驱动进给电机、驱动冷却泵电机.PLC 控制液压泵电机启动带动仿形指接触要被仿形的工件,驱动主轴电机、驱动进给电机、驱动冷却泵电机根据仿形形式进行运动.X62W型万能铣床的外形结构如图3-1所示,它主要由床身、主轴、刀杆、悬梁、工作台、回转盘、横溜板、升降台、底座等几部分组成。
基于PLC的液压泵站远程控制系统的设计与实现

4、上位机:选择性能稳定、易于操作的上位机,用于监控和控制配料过程。
参考内容二
引言
液压施工升降机是一种广泛应用于建筑工程的垂直运输设备,其安全性和效率 对于整个工程的进度和成本具有重要影响。为了提高液压施工升降机的安全性 和效率,本次演示将介绍一种基于PLC(可编程逻辑控制器)及触摸屏的液压 施工升降机控制系统设计。
6、易于集成到现有的工业自动化系统中。由于PLC是工业自动化领域广泛使用 的控制器,因此基于PLC的液压泵站远程控制系统可以方便地与其他工业设备 或系统进行集成,从而实现整个工厂或车间的自动化和智能化。
7、系统安全性高。在数据传输过程中采用了加密技术等安全措施,确保数据 的安全性和完整性;同时对操作人员的操作权限进行了严格的控制和管理,避 免了误操作和恶意操作的可能性。
4、系统测试与调试:在完成硬件连接和软件设计后,进行系统测试和调试。 首先,检查硬件连接是否正常,确保传感器和执行器能正确地与PLC进行通讯。 其次,对PLC程序进行在线调试,检查程序逻辑是否正确,并优化程序以改善 控制效果。最后,对触摸屏的操作界面进行测试,确保操作简便、直观。
谢谢观看
二、系统实现
在系统实现方面,首先需要根据实际需求选择合适的PLC控制器和液压泵站设 备,然后进行硬件和软件的配置和设计。
硬件方面,需要将液压泵站的运行状态、压力、流量等信号接入PLC控制器, 同时将PLC控制器通过通讯模块接入互联网,以便远程控制。软件方面,需要 编写PLC控制程序,实现液压泵站的自动控制和远程控制。
此外,还需要开发一套远程控制系统软件,用于发送控制指令和接收设备运行 状态信息。该软件可以采用B/S或C/S架构,支持多种通讯协议,如Modbus、 Profinet等。
基于PLC的液压站精确定位PID控制系统

2 硬 件结构 液 压站 定位 过程 中其 位移 传感 器测得 的位 置
值会 逐 渐变 化 ,当 液压 站 运 动 至 上位 机 设 置 的轮 胎 所需 段宽 时 ,要保证 段 宽恒定 不变 ,必须 相应 地 调 整伺 服 阀组 的开 度 ,通 过 调 整 阀组 的开 度 可 维 持 上轮 辋 的精 确 位置 。系 统将液 压缸 的位 移作 为
3O8 Βιβλιοθήκη 橡 胶 工 业 2011年 第 58卷
反 馈信 号 实施 闭 环 控 制 ,上 位 机 设 定 的段 宽位 置
表 1 PID运 算 回 路 变 量
与 实 际液压 缸 所 处 位 置 比较 得 到 误 差 e,误 差 信 号 经 过 PLC内部 的 PID 调 节 器 计 算 后 通 过模 拟 量 输 出模 块控 制 伺 服 阀组 ,可 使 实 际 的 液 压 缸 位 置 跟 踪设 定位 置 ,从 而 实 现液压 站 的准 确定 位 。
定 位 过程 中茎妻,1上。 轮 辋 与。 下 轮辋。之 间距 离 构 成
的段宽 直 接影 响着 轮胎 均 匀性试 验 机所 测参 数及
设 备本 身 的精 度 。在 生产 过程 中要 求 轮胎 均匀 性
关 键 词 :PLC;PID;精 确 定位 中图 分 类 号 :TQ330.4叶。92 文 献 标 志 码 :B 文 章 编 号 :1000—890X(2011)05—0307—03
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PLC 控制的液压控制系统
[ 摘要] 采用可编程控制器(PLC)代替继电器控制器,对机械手的液压驱动系统进行控制,通过输入输出接口
建立与机械手液压系统开关量和模拟量的联系,实现机械手搬运工件的顺序动作和自动控制,达到准确度高、控
制方便、可靠性好的目标,大大提高了生产率和自动化程度,减少了系统故障,具有很强的实用性。
[ 关键词] PLC;液压控制;机械手
1、前言( Introduction)
目前PLC 在工业生产过程控制自动化和传统产业技术改造等方面得到了广泛应用, 与传统的继电器控制相比, PLC 具有控制系统构成简单、可靠性高、通用性强、抗干扰能力强、易于编程、体积小、可在线修改、设计与调试周期短、便于安装和维修等突出优点, 而且一般不需要采取什么特殊措施, 就能直接在工业环境中使用, 更加适合工业现场的要求, 使用PLC 控制液压控制系统能提高系统的整体性能,具有较明显的优越性。
本文介绍基于PLC 控制的某液压机械手的典型液压控制回路及其PLC 控制方法。
2、控制要求分析(Analys is of control demands )
在生产现场工作开始后, 机械手在一个工作循环中需要依次完成以下顺序动作: 下降、夹紧、上升、左移、下降、松开、上升、右移( 共8个顺序动作) , 这是一个典型的顺序控制问题。
采用PLC 实现机械手的自动循环控制, 需要在某些动作位置设置位移传感器或行程开关来检测动作是否到位, 并确定从一个动作转入到下一个动作的条件。
根据机械手的动作要求, 选用3 个液压缸来完成该8 个顺序动作: 升降缸1 在工件两个位置( 原位与目标位置) 上方的下降和上升运动, 移动缸2 的左移和右移运动, 夹紧缸3 的夹紧和松开动作。
缸1 下降或上升到位时应停止运动, 缸2 左移或右移到位时也应停止运动, 故需分别设置一行程开关S1、S2、S3、S4。
根据机械手的动作过程和要求, 绘制出系统的控制功能流程图, 如图1 所示。
图 1
3、液压系统图(Hydraulic scheme)
根据机械手的动作要求和工作循环设计出液压系统图, 如图2所示:
图 2
按下启动按钮, 电磁铁1DT 得电, 阀4 左位接入, 液压泵9 输出的压力油经阀4 左位接入升降缸1 的上腔, 其活塞向下运动, 推动机械手下降( 动作①右位下降) ; 当缸1 下降到下限位置, 压下行程开关S1, 使得电磁铁1DT 断电, 阀4 切换至中位(O 型中位机能) , 缸1 停止在下限位, 而电磁铁5DT 得电, 阀8 左位接入, 泵输出的压力油经过单向阀6、减压阀7 进入夹紧缸3 的上腔, 推动其活塞下移夹紧工件( 动作②夹紧) ; 夹紧工件后, 当缸3 上腔压力达到减压阀7 的调定压力时, 压力继电器11 动作发出信号, 控制电磁铁2DT 得电, 阀4 的右位接入系统, 推动缸1 向上运动( 动作③右位上升) ; 缸1 上升到上限位置时, 压下行程开关S2, 电磁铁2DT 断电, 阀4 切换到中位, 缸1 停止在上限位, 而电磁铁3DT 得电( 此时工件仍被夹紧, 压力继电器11 仍在动作) , 阀5 左位接入, 缸2 向左运动( 动作④左移) ; 缸2 左移到左限位置, 压下行程开关S3, 电磁铁3DT 断电, 阀5 切图2 换至中位,缸2 停止在左限位, 而电磁铁1DT 得电, 阀4 左位接入系统, 缸1 向下运动( 动作⑤左位下降) ; 缸1 下降到下限位置, 压下行程开关S1( 此时缸2 处于左限位置) , 电磁铁5DT 断电, 阀8 回复右位, 缸3 活塞上移放下工件于目标位置( 动作⑥松开) ; 松开工件后, 缸3 油腔压力降低, 压力继电器11 复位, 发出信号控制电磁铁2DT 得电, 缸1 向上运动( 动作⑦左位上升) ; 上升到上限位置, 压下行程开关S1, 电磁铁2DT断电, 缸1 停止在上限位置, 同时电磁铁4DT 得电, 阀5 右位接入, 缸2 向右移动( 动作⑧右移) ; 右移到右限位置, 压下行程开关S4, 阀5 切换至中位, 缸2 停止在右限位置( 复位) 。
至此完成了机械手的8 个自动控制动作, 进入到下个动作循环。
电磁铁动作顺序表如表1(“+”表示得电,“- ”表示断电) 所示。
表1 电磁铁动作顺序表
该液压系统中, 利用电液比例换向阀4 和5 控制升降缸1 和移动缸2 的运动速度, 用比例溢流阀12 控制夹紧缸的夹紧速度; 减压阀的作用是限定并保持夹紧压力, 单向阀的作用是对夹紧液压缸3 进行保压, 比例溢流阀12 还起到平衡作用。
在PLC 对各输入输出量的控制下, 完成顺序动作。
4、PLC 选型与I/O 分配(PLC lectotype and input--output allocation)
目前市场上的PLC 品种规格众多, 控制功能也各有特点。
综合分析机械手的动作要求, PLC 在机械手中需要完成的控制功能较多, 控制精度较高, 运算速度较快且具有数据处理能力, 并考虑整个系统的经济和技术指标, 由于PLC 的输出电流较小, 需要用功率模块来控制比例液压阀, 选用西门子公司的S7- 200 系CPU226 型PLC, 其I/O 功能和指令系统都能满足对该机械手的控制要求。
控制按钮、各处的行程开关及压力继电器等开关量信号直接与PLC 的输入端子相连, PLC的开关量输出端子直接与各个电磁阀相连, 用PLC 上所带的24V 电源或外接24V 电源驱动, 采用编程软件( STEP 7-Micro/WIN V4.4 版)进行编程和运行监控。
图3 为PLC 的I/O 地址分配和外部接线图, 限于篇幅没有具体给出硬件布置原理图和控制系统梯形图及其程序语句。
图 3
系统设有5 种工作方式: 手动、连续、单周期、单步和回原点, 可以满足不同的工作要求。
5、结论(Conclus ions )
采用PLC 控制的搬运工件机械手的液压控制系统, 使系统模块化, 减小了液压系统和设备的体积, 其工作性能稳定且各I/O 指示简单、明了, 大大缩短了维修、改制、安装和调试液压系统和设备的时间。
克服了采用继电器控制系统必须是手工接线、安装、改动所需要花费大量时间及人力和物力的缺点, 也克服继电器控制系统的可靠性差、控制不方便、响应速度慢等不足。
用PLC 控制的机械手的液压控制系统, 可使其工作平稳、准确, 更有利于改善工人的劳动环境, 降噪增效,节约能源, 而且提高了液压系统的性能, 延长液压设备的使用寿命, 大大提高了生产率和自动化程度, 特别是改变机械手的某些动作时时仅需进行程序的调整。
总之, 基于PLC 控制的液压控制系统, 可大大简化控制设备的结构, 节能降耗, 易于实现机、电、液一体化的控制装置, 使生产平稳可靠、效率和自动化程度提高。
参考文献:
[1] 章宏甲,黄谊,王积伟.液压与气压传动[M].北京:机械工业出版社,2000.5.
[2] 何存兴,张铁华. 液压与气压传动(第二版) [M].武汉:华中科技大学出版社,2000.8.
[3] 姜继海,宋锦春,高常识. 液压与气压传动[M].北京:高等教育出版社,2002.8.
[4] 陈在平,赵相宾.可编程控制器技术与应用系统设计[M].北京:机械工业出版社,2002.6.
[5] 高钦和.可编程控制器应用技术与设计实例[M].北京:人民邮电出版社,2004.7.
[6] 廖常初.PLC 编程及应用(第2 版) [M].北京:机械工业出版社,2005.5.。