2018年西安工业大学《机电控制工程》试题
西北工业大学本科自动控制原理期末试题参考答案

D( z ) = ( z − 1)( z − e −T ) + KTz = z 2 − (1 + e −T − KT ) z + e −T =0
D(1) = KT > 0 −T D (−1) = 2(1 + e ) − KT > 0 e −T < 1
K >0 2(1 + e −T ) < K T
综合之: 0 < K < (3) (5 分)
2(1 + e −T ) T =1 = 2.736 T
z →1
K v = lim( z − 1)G ( z ) = lim
z →1KT KTz =源自−T 1 − e −T z −eT =1, K =1
e(∞ )
r ( t )=t
=
AT AT (1 − e −T ) = Kv KT
ω = 3 K * = 54
4 <K <6 9
4 < K
*
< 54
σ
0 0
即:
↑
4 (3) (3 分)依根轨迹, < K < 6 时, K ↑ ⇒ t s ↑ 9 e ↓
ss
四. (共 15 分) 解 (1) (5 分) (2) (5 分)
−Ts KTz 1 K 1 − e Z G( z) = Z ⋅ = s ( z − 1)( z − e −T ) s + 1 s
(3) (3 分)依图
ω c = 10
γ = 180° + arctan
10 10 10 − 90° − arctan − 2 × arctan = 63.6° 100 3 0 .3
西北工业大学电器制造专业大一《电路》测试A卷及答案
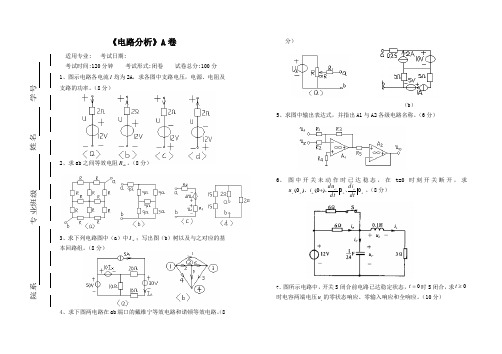
《电路分析》A 卷适用专业: 考试日期:考试时间:120分钟 考试形式:闭卷 试卷总分:100分 1、图示电路各电流I 均为2A ,求各图中支路电压,电源、电阻及支路的功率。
(8分)2、求ab 之间等效电阻ab R 。
(8分)3、求下列电路图中(a )中X I ;写出图(b )树以及与之对应的基本回路组。
(8分)4、求下图两电路在ab 端口的戴维宁等效电路和诺顿等效电路。
(8分)(b ) 5、求图中输出表达式,并指出A1与A2各级电路名称。
(6分)6、 图中开关未动作时已达稳态,在t=0时刻开关断开,求++++00)0()0(dtdidt du i u L C L c 、、、。
(8分)7、图所示电路中,开关S 闭合前电路已达稳定状态,0=t 时S 闭合,求0≥t 时电容两端电压c u 的零状态响应、零输入响应和全响应。
(10分)院系专业班级姓名学号8、 电路中H L R A I V U S S 42210=Ω===,,,。
求S 闭合后电路中的电流L i i 和。
(10分)9、已知图中1012==I I A ,求I 与s U 。
(8分)10、图中。
,,,V U S C R L S4510223∠==Ω=Ω=ωω求各元件的电压、电流和电源发出的复功率。
(8分)11、图中V U R R M L L S 1265102121=Ω==Ω=Ω==,,,ωωω,求L Z 最佳匹配时的值以及获得功率。
(8分)12、画图并证明二瓦计法测量三相功率。
说明什么是三相四线制,二瓦计法测量功率适用于三相四线制么?为什么?(10分)《电路分析》A 卷答案1、(a )U=2*2+12=16V P us =12*2=24W P R =22*2=8W P 支=32W为正吸收,为负释放,取p=UI 为关联方向。
(b)U=12-2I=8V P US =12*(-2)=-24V P R =22*2=8W P 支=-16W (c)U=2*2-12=-8V P US =12*(-2)=-24W P R =22*2=8W P 支=-16W (d)U=-2*2-12=-16V P US =12*2=24W P R =22*2=8W P 支=32W 2、(a)由对称得:R ab =(R/2)+(R/4)+(R/4)+(R/2)=1.5R(b)R ab =9+3+(9+3)//(3+3)=16欧 (c)R ab =R 2+(1-u)R 1(d)R ab =2+(1+1)//2=3欧3、结点①②③④以①为参考点,设U 2,U 3,U 4。
西北工业大学自动控制期末试卷
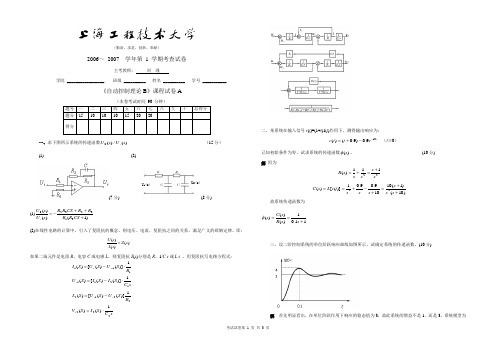
考试试卷第 1 页 共 3页(勤奋、求是、创新、奉献)2006~ 2007 学年第 1 学期考查试卷主考教师: 刘 瑾学院 _________________ 班级 __________ 姓名 __________ 学号 ___________《自动控制理论B 》课程试卷A(本卷考试时间 90 分钟)题号 一 二 三 四 五 六 七 八 九 十 总得分 题分 15 10 10 10 15 20 20得分一、求下图所示系统的传递函数)(/)(0s U s U i (15分) (1) (2)(7分)Uo(s)U i (s)(8分)(1))1()()(3132320+++-=CS R R R R CS RR s U s U i (2)在线性电路的计算中,引入了复阻抗的概念,则电压、电流、复阻抗之间的关系,满足广义的欧姆定律。
即:)()()(s Z s I s U = 如果二端元件是电阻R 、电容C 或电感L ,则复阻抗Z (s )分别是R 、1/C s 或L s 。
用复阻抗写电路方程式:sC S I S V R S U S U S I sC S I S I S U R S U S U S I c c c c C r 222221212111111)()(1)]()([)(1)]()([)(1)]()([)(⋅=-=⋅-=⋅-=二、某系统在输入信号r(t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
(10分) 解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ三、设二阶控制系统的单位阶跃响应曲线如图所示。
西安交通大学18年9月课程考试CAD-CAM作业考核试题【100分答案】
西安交通大学18年9月课程考试《CAD-CAM》作业考核试题
1、A
2、C
3、D
4、C
5、A
一、单选题共30题,60分
1、在CAD作业中,采用数据文件形式来处理工程数表、线图数据,其目的是()A减少占用内存,使数据文件独立于计算程序
B减少占用内存,使数据文件与计算程序融为一体
C占用大量内存,较好解决数据共享
D占用外存,使数据文件与操作系统紧密结合
参考答案是:A
2、应用软件是在操作系统、( )基础上针对某一专门的应用领域而研制的软件。
ACAD软件
BCAM软件
C支撑软件
D编译系统
参考答案是:C
3、以下与CAD/CAM无关的概念和技术是( )
A并行工程
B精益生产
C敏捷制造
DCAI
参考答案是:D
4、在CAD/CAM系统中,()是连接CAD、CAM的纽带。
ACAE
BCAG
CCAPP
DCAQ
参考答案是:C
5、关于MRPⅡ,下列描述中错误的是( )
AMRPⅡ是一种与MRP完全不同的新技术
BMRPⅡ在内容和能力上有了很大扩充,涵盖了企业整个生产经营活动
CMRPⅡ集成了生产、财务、销售、工程技求、采购等各个子系统
DMRPⅡ系统的核心部分是物料需求计划
参考答案是:A。
西安交通大学17年3月课程考试《机械控制工程》作业考核试题
西安交通大学17年3月课程考试《机械控制工程》作业考核试题(总8页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--西安交通大学17年3月课程考试《机械控制工程》作业考核试题一、单选题(共 40 道试题,共 80 分。
)1. 以下关于系统的说法错误的是()。
A. 系统是由元素和子系统组成的B. 系统的特性仅取决于组成系统的元素C. 系统具有动态特性D. 系统内存在信息的传递与转换正确答案:2. 若闭环系统的特征式与开环传递函数的关系为F(s)=1+G(s)H(s),则( )A. F(s)的零点就是系统闭环零点B. F(s)的零点就是系统开环极点C. F(s)的极点就是系统开环极点D. F(s)的极点就是系统闭环极点正确答案:3. 传递函数只与系统( )A. 自身内部结构参数有关B. 输入信号有关C. 输出信号有关D. 干扰信号有关正确答案:4. 关于线性系统说法正确的是()。
A. 都可以用传递函数表示B. 只能用传递函数表示C. 可以用不同的模型表示D. 都是稳定的正确答案:5. 控制系统依不同的尺度可分为不同的类型,以下()的分类是正确的。
A. 线性系统与离散系统B. 开环系统与闭环系统C. 功率放大系统和人工控制系统D. 数字系统和计算机控制系统正确答案:6. 某传递函数G(s)=K1+K2(1/s)+K3s ,则它是由()组成的。
A. 比例+积分环节B. 比例+微分环节C. 比例+惯性环节D. 比例+积分+微分环节正确答案:7. 对于一阶系统,时间常数越大,则系统()A. 系统瞬态过程越长B. 系统瞬态过程越短C. 稳态误差越小D. 稳态误差越大正确答案:8. 已知系统的特征方程为S3+S2+τS+5=0,则系统稳定的τ值范围为()。
A. τ>0B. τ<0C. τ>5D. 0<τ<5正确答案:9. 以下关于系统稳态偏差的说法正确的是()A. 稳态偏差只能取决于系统的结构和参数B. 稳态偏差只取决于系统输入与干扰C. 稳态偏差与系统结构、参数、输入和干扰等有关D. 系统稳态偏差始终为0正确答案:10. 闭环控制系统的开环传递函数是( )A. 输出信号的拉氏变换与输入信号的拉氏变换之比B. 输入信号的拉氏变换与输出信号的拉氏变换之比C. 反馈信号的拉氏变换与误差信号的拉氏变换之比D. 误差信号的拉氏变换与反馈信号的拉氏变换之比正确答案:11. 系统特征方程式的所有根均在根平面的左半部分是系统稳定的 ( )A. 充分条件B. 必要条件C. 充分必要条件D. 以上都不是正确答案:12. 系统的单位脉冲响应函数为w(t)=,则系统的传递函数为()。
西北工业大学22春“机械设计制造及其自动化”《机电一体化基础》期末考试高频考点版(带答案)试卷号:4
西北工业大学22春“机械设计制造及其自动化”《机电一体化基础》期末考试高频考点版(带答案)一.综合考核(共50题)1.光栅利用(),使得它能测量比栅距还小的位移量。
A.分辨率B.细分电路C.差动变压器D.感应同步器参考答案:B2.传动机构减小摩擦,能够提高()。
A.机构的稳定性能B.机构的灵敏度C.机构的刚度D.机构的传动精度参考答案:B3.步进电机的最大动态转距()最大静转距,随脉冲频率的升高而降低。
A.大于B.小于C.等于D.大于或小于参考答案:B4.步进电动机多相通电可以()。
A.减小步距角B.增大步距角C.提高电动机转速D.往往能提高输出转矩5.单向晶闸管SCR由三个极组成,分别称为:阳极、()、门极。
A.正极B.负极C.阴极D.太极参考答案:C6.机电一体化产品由五个基本要素构成,五个基本要素构是机械本体、动力源、检测与传感装置、控制与信息处理装置和()。
A.扭矩负载B.平稳性C.传动精度D.执行机构参考答案:D7.光栅传感器的莫尔条纹明暗变化一个周期,说明光栅移动了()。
A.3/4栅距B.1/2栅距C.1/4栅距D.一个栅距参考答案:D8.有一台三相步进电机,转子上有80个齿,三相六拍运行时,其步距角为()。
A.0.50°B.0.750°C.10°D.1.250°参考答案:B齿差调整法中滚珠丝杠螺母副的齿轮齿数分别为Z1=99,Z2=100,丝杠螺距L=6mm,则当螺母同向转过一个齿时,其相对轴向位移为()。
A.0.001mmB.0.009mmC.0.006mmD.0.005mm参考答案:C10.机电一体化的所谓“三A革命”是:工厂、()、家庭自动化。
A.办公B.计算机C.打印机D.显示器参考答案:A11.细分技术就是在莫尔条纹变化一周期内,不只是输出一个脉冲,而是输出若干个脉冲以提高()。
A.分辨率B.电流速C.涡流传感速D.合格率参考答案:A12.影响开环伺服系统的定位精度最主要的因素是()。
陕西省教员继续教育—公需科目《生态文明建设和环境保护》考试试题与答案(一)
陕西省2019年教师继续教育一公需科目?生态文明建设与环境保护?考试试题及答案(一)单项选择题(共30题,每题2分)1.1978年,全国科学大会在北京召开,西安交通大学计算机教研室的()科研工程,以其创新性及填补国内空白的首创性被全国科学大会授予“全国科学大会奖〃(90年国家科委认定此奖项等同于“国家科技进步奖〃),也是交大计算机系获得的首个国家级科研大奖。
A.光笔图形显示器B.晶体二极管C.阻容元件D.电子管我的答案:A参考答案:A2.()是第一位讲授机电学的中国教授,也是中国第一台交流发电机与电动机的研制者,被誉为“中国电机之父〃。
A.陈学俊B.彭真C.彭康D.钟兆琳我的答案:D参考答案:D3.汪应洛教授是我国管理工程学科的第一位博士生导师和博士后流动站导师,最早提出〔)理念,推动了国内培养具有双学位和MBA高级管理人才的教育。
A.从管理人才中培养工程师B.从工程师中培养管理人才C.同时培养管理与工程师人才D.培养卓越管理人才我的答案:D参考答案:B4.朱楚珠通过对女童死亡率的研究,建设了世界上第一个,也是唯一一个“改善女孩存在环境试验区〃,直接推动了国家关爱女孩行动,其地点在()oA.陕西洛川B.陕西商南C.安徽巢湖D.安徽蚌埠我的答案:C参考答案:C5.由西安交通大学姚熹教授发起创办的()期刊是国际上唯一涵盖电介质所有研究领域的期刊。
A.?JAD?B.?JDA?C.?JPA?D.?JFA?我的答案:A参考答案:A6.1959年7月31日,国务院发出(L同意教育部关于交通大学上海、西安两个局局部别独立成为上海交通大学和西安交通大学,以及两校分设后假设干具体问题的处理意见。
A.?关于在高等学校中确定一批重点学校的决定?B.?关于交通大学上海、西安两个局局部别独立成为上海交通大学和西安交通大学的批复?C.?关于交通大学上海、西安两个局局部别独立成为两个学校的报告?D.?关于交通大学迁校及上海、西安有关学校的调整方案的报告?我的答案:B参考答案:B7.朱城教授著成堪与国际大师铁木辛柯相媲美的中国版?材料力学?,被誉为中国的(),为国内首批工程力学专业的创办做出了重要奉献。
北京工业大学《自动控制原理》2018-2019学年第二学期期末试卷

北京工业大学2018——2019学年第2学期《自动控制原理》考试试卷A卷考试说明:考试时间:95分钟考试形式(开卷/闭卷/其它):闭卷适用专业:信息学部自动化学院自动化专业、机器人工程专业承诺:本人已学习了《北京工业大学考场规则》和《北京工业大学学生违纪处分条例》,承诺在考试过程中自觉遵守有关规定,服从监考教师管理,诚信考试,做到不违纪、不作弊、不替考。
若有违反,愿接受相应的处分。
承诺人:学号:班号:。
注:本试卷共4大题,满分100分,由考试试卷.pdf和答题纸.word两个文档构成。
考试时必须使用答题纸.word文档作答,并将答案嵌入在题目下方,如因答案嵌入在其他位置而造成的成绩缺失由考生自己负责。
卷面成绩汇总表(阅卷教师填写)题号一二三四总成绩满分20202040得分得分一、填空题(每小题2分,共20分)1.自动控制系统的基本组成部分包括______、______、______和______。
2.在闭环控制系统中,控制器的作用是根据______信号和______信号之间的差异来生成控制信号。
3.比例控制器的输出信号与输入信号的比值称为______。
4.在自动控制系统中,______负责将控制信号转换为被控对象的输入信号。
5.控制系统的稳态误差是指系统输出在稳定状态下与期望输出之间的______。
6.自动化控制系统通过对生产过程的______进行监测和调节,实现生产效率和质量的提高。
7.控制系统中,______用于对反馈信号进行处理和调节,生成控制器的输入信号。
8.反馈器的作用是判别被控对象的输出与期望输出之间的______。
9.比例-______-微分(PID)控制器是常用的控制器类型之一。
10.控制系统的输入信号经过______处理后,通过______作用于被控对象,产生相应的输出。
得分二、选择题(每小题2分,共20分)1.在自动控制系统中,反馈的作用是:a)控制系统的输入信号b)提供被控对象的输入信号c)判别被控对象的输出与期望输出之间的差异d)调节比例增益2.比例控制器的输出信号与输入信号的比值称为:a)增益b)反馈c)控制信号d)误差3.开环控制系统和闭环控制系统的区别在于:a)是否有传感器b)是否有反馈c)控制器的类型不同d)开关的位置不同4.PID控制器中的"PD"代表:a)比例-微分b)比例-差分c)积分-微分d)比例-导数5.在自动控制系统中,执行器的作用是:a)测量被控对象的信号b)控制控制器的输出信号c)将控制信号转换为被控对象的输入信号d)判别被控对象的输出与期望输出之间的差异6.控制系统的稳态误差是指:a)系统输出的稳定波动范围b)控制信号的变化范围c)期望输出与实际输出之间的差异d)控制系统的输入信号与输出信号之间的误差7.变频器常用于控制:a)温度b)压力c)电流d)转速8.自动化控制系统能够实现的效果包括:a)提高生产效率和质量b)减少生产成本c)增加设备的寿命d)降低能耗9.控制系统中的传感器用于:a)测量被控对象的输入信号b)判别输出与期望输出之间的差异c)调节比例增益d)生成控制信号10.自动化原理中的反馈控制是一种:a)有源控制b)无源控制c)开环控制d)闭环控制得分三、判断题(每小题2分,共20分)当然,以下是十道判断题:1.在闭环控制系统中,控制器的输出信号根据传感器测量值和设定值之间的差异来生成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、填空题(每题3分,共18分)
1、一阶系统的传递函数为521
s +,其单位阶跃响应为( ) A 21t e -- B 255t e -- C 25t e --
2、单位反馈系统的闭环传递函数为5425()4698s s s s s φ=
++++,则该闭环系统() A 、稳定 B 、不稳定 C 、临界稳定
3、系统的开环传递函数为10()(52)
G s s s =+,则系统的开环增益( ) A 10 B 5 C 2
4、非单位反馈系统,其前向通道传递函数为G(S),反馈通道传递函数为H(S),则输入端定义的误差E(S)与输出端定义的误差E '(S)之间有如下关系: ( )
A E(S)=H(S)﹒E '(S)
B E '(S)=H(S)﹒E(S)
C E(S)=G(S) ﹒H(S)﹒E '(S)
5、一阶系统的闭环极点越靠近S 平面原点:( )
A 准确度越高
B 响应速度越慢
C 响应速度越快
6、对数频率稳定判据公式Z=P-2N ,其中N 是( )
A 对数相频特性曲线()ϕω穿越180-线的次数。
B 在()0L ω>范围内,对数相频特性曲线()ϕω穿越180-线的次数。
C 在()0L ω<范围内,对数相频特性曲线()ϕω穿越180-线的次数。
二、若系统在阶跃输入()1()r t t =作用时,其输出响应为2()1t t y t e
e --=-+,试求系统的
传递函数和脉冲响应函数。
(8分)
三、系统结构图如图所示,求系统的传递函数。
(8分)
四、证明图(a )所示的电路系统和图(b )所示的力学系统是相似系统。
(即具有相同形式的数学模型) (10分)
(a ) (b )
五、如图(a )示机械系统,在质量块m 上施加f(t)=3N 阶跃力后,质量块m 产生的位移x(t)的变化曲线如图(b)示,试确定质量m ,粘性阻尼系数和弹簧刚度系数k 的值(10分)
(a) (b)
或 五、如图示反馈系统,试确定结构参数,k τ,使系统满足动态性能指标%20%,1p t s σ==,并计算r t 和s t 。
六、已知单位反馈系统开环传递函数为()(0.11)(0.21)
K G s s s s =
++(14分) (1)、使系统稳定的K 值范围。
(2)、若r(t)=2t+2时,要求系统的稳态误差0.25ss e ≤,试求K 的取值范围。
七、设单位反馈系统开环传递函数8()2
G s s =+,当输入()2sin(245)r t t =+时,
求系统的稳态输出。
(8分)
八、单位反馈系统闭环传递函数()(1)(0.51)K s s s s k
φ=
+++,用Nyquist 判据求K 的范围。
(10分)
九、最小相位系统的对数幅频特性曲线如图所示。
要求:(14分)
(1)、写出系统的开环传递函数
(2)、计算系统的剪切频率c ω和相角裕度γ。
(3)、判断闭环系统稳定性。