基于CCD16点数学模型的全自动焦度计光学图像系统的设计
基于自动焦度计的图像采集和处理系统的分析研究
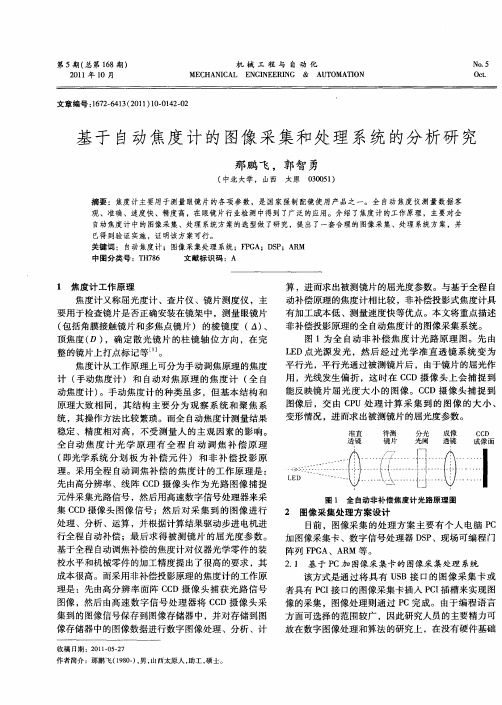
原理 大致 相 同 ,其 结 构 主要 分 为 观察 系 统 和 聚焦 系 统 ,其 操作 方法 比较 繁琐 。而全 自动 焦度计 测 量结果 稳 定 、精度 相对 高 ,不 受 测量 人 的主 观 因 素 的影 响。 全 自动 焦 度 计 光 学 原 理 有 全 程 自动 调 焦 补 偿 原 理 ( 即光学 系 统 分 划 板 为 补 偿 元 件 ) 和 非 补 偿 投 影 原 理 。采用 全 程 自动调 焦 补 偿 的焦 度 计 的 工 作原 理 是 : 先 由高分 辨率 、线 阵 C D摄 像 头作 为光 路 图像 捕 捉 C
校水 平 和机 械零件 的加 工精 度提 出 了很 高 的要求 ,其 成 本很高 。而采用 非补 偿投 影原理 的焦 度计 的工 作原 理 是 :先 由高 分 辨 率 面 阵 C D摄 像 头捕 获 光路 信 号 C
图像 ,然后由高速数字信号处理器将 C D摄像头采 C
集 到 的图像 信号保 存 到图像 存储器 中 ,并对 存储 到 图 像存 储器 中的图像 数据进 行数 字 图像处 理 、分析 、计
率 要高 过 D P S。 以 A M 为 核心 的方 式通 过 嵌 入 式 操作 系统 来 管 R 理 系统 的 内外设 备 ,基本 上成 为一个 可 以单独 工 作 的 专 用 图 像 采 集 处 理 系 统 。在 此 方 式 中 ,依 靠 一 块 CL P D来实 现 图像采集 或 显示 的逻辑 控制 器 。
收 稿 日期 :2 1—5 2 0 lO —7
像的采集 ,图像处理则通过 P C完成。由于编程语言
放 在数 字 图像 处理 和算 法 的研究 上 ,在没 有硬 件基 础
全自动焦度仪电路系统的设计
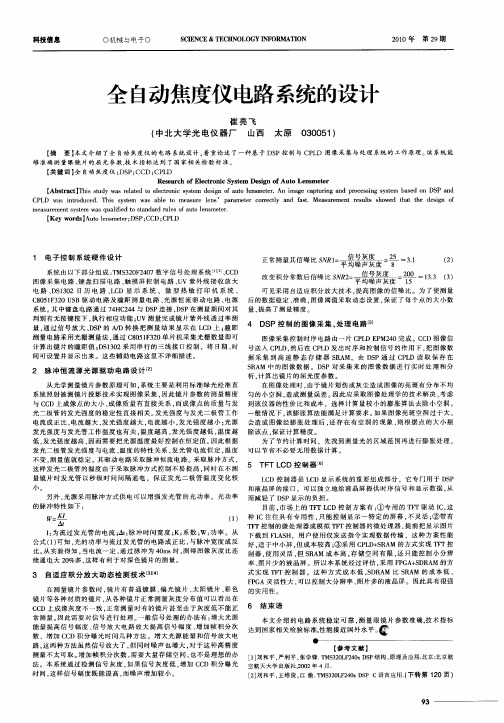
判别有无按键按下 . 行相应功能 : 执 UV测 量 完 成 镜 片 紫 外 线 透 过 率 测 4 D P 控 制 的 图像 采 集 、 理 电路 [ S 处 量 . 过 信 号 放 大 、 S 的 AD 转 换 把 测 量 结 果 显 示 在 L D 上 ; 距 通 DP / C 瞳 测 量 电路 采 用 光 栅 测 量 法 , 过 C 0 13 0单 片机 采 集 光 栅 数 量 即可 通 85F2 图像 采 集 控 制 时 序 电 路 由 一 片 C L P 4 P D E M2 0完 成 。C D 图像 信 C 计 算 出镜 片 的瞳 距 值 ; S 3 2采 用 串行 的三 线 接 口控 制 ,将 日期 、 D 10 时 号 送 入 C L 然 后 在 C L P D, P D发 出 时序 和控 制 信 号 的 作 用 下 , 图 像 数 把 间可 设 置 并 显 示 出 来 。 这 些辅 助 电路 这 里 不 详 细 描 述 。 据 采 集 到 高 速 静 态 存 储 器 S A , 由 D P通 过 C L 读 取 保 存 在 R M S PD
1 电子 控 制 系 统硬 件设 计
系统 由 以下 部 分 组 成 :MS 2 F 4 7数 字 信 号 处 理 系 统 …口、 C T 3O 2 0 ]C D 图像 采 集 电 路 、 盘 扫 描 电路 、 摸 屏 控 制 电路 、 V 紫 外 线 接 收 放 大 键 触 u
正 常 测 量 其 信 噪 比 S Rl 信 号 灰 度 一 N =
与 C D上 成 像 点 的 大 小 、 像 质 量 有 直 接 关 系 , 成 像 点 的 质 量 与 发 到 该 仪 器 的 性 价 比和 成本 ,选 择 计 算 量 较 小 的 膨胀 算 法 去 除 小 空 洞 。 C 成 而 光 二 极 管 的 发 光 强 度 的 稳 定性 直 接相 关 。 光 强 度 与 发 光 二 极 管 工 作 发 般 情 况 下 , 膨 胀 算 法 能 满 足计 算 要 求 。 该 如果 图像 亮 斑 空 洞 过 于 大 , 电流 成 正 比 , 流 越 大 , 光 强 度 越大 , 电 发 电流 越 小 , 光 强度 越 小 ; 源 会 造 成 图像 经 膨 胀 处 理 后 , 存 在 有 空 洞 的 现 象 , 根 据 点 的 大 小 剔 发 光
全自动焦度仪光学系统的研究
引 言 ・ ]
全 自动焦度 仪主 要用 于测量眼镜 镜片 ( 括角膜 接触 镜 片和多 焦点 镜 片) 包 的顶焦 度 、 柱镜度 、 镜度 、 棱 光学 中心 及确定 眼镜镜 片 的散 光轴 位方 向等 , 未切 边 的 眼镜 镜 片 上打 印 标记 , 可 检查 眼镜 镜 片是 否 在 并 正确安装 在镜 架 中的精密 光学计量 仪器 。焦度仪又 称屈 光度 计 、 片 测度 仪 , 泛应 用 于医 院眼科 、 镜 广 眼镜 店 和镜 片厂 家 。 全 自动 焦度仪光 学系 统是产 品设计 的核 心 , 光 学 系统采 用 了非移 动 补偿 光 学测 量 方 法 , 源 经光 该 光
全 自动焦 度仪 光 学 系统 的研 究
*
崔 亮 飞 , 海峰 刘
( 中北 大学 光 电仪 器 厂 , 山西 太 原 005) 30 1
摘 要 : 绍 了一种新 的全 自动 焦度仪 的光 学 系统的 设计 原理 , 介 即采 用微 珠 双透镜 准直 系统 。该
系统 改善 了光 学部分 的准直性 , 高 了仪 器的检 测 精 度 ; 外 由于被 测 镜 片作 为 光 学 系统 的一 提 另 个组成部 分暴露在 外界 环境 中, 阳光及 各 种 杂散 光容 易影 响 系统 正 常 工作 , 采 用干 涉和 截 太 即
S u y o ptc ls s e o u o a i e m e e t d n o ia y t m fa t m tc lns t r
C Lin f i L Haf n U/ a g e . 儿, i eg
( o o lc r n t u e tCo a y Ph t e e ti I s r m n mp n ,No t n v r iy o i a c r h U i e s t fCh n ,Tay a 3 0 1,Chi ) iu n0 0 5 na
基于图像处理技术的自动焦度测量方法的开题报告

基于图像处理技术的自动焦度测量方法的开题报告一、选题背景随着数字化和自动化技术的快速发展,图像处理技术在工业生产、医学检测和生活中的应用越来越广泛。
在图像处理中,焦度测量是一个重要的问题。
焦度测量是指计算图像的清晰度或清楚度的过程。
在实际应用中,如在自动聚焦系统中,需要准确地测量焦度以保证清晰的图像质量。
因此,发展一种基于图像处理技术的自动焦度测量方法是很有必要的。
二、选题意义传统的焦度测量方法往往需要手动调整镜头位置,较为低效,而基于图像处理技术的自动焦度测量方法可以有效地提高测量效率并减少人工干预。
此外,在医学影像、工业检测等领域,高精度的焦度测量也具有重要的实际意义。
三、目标和内容本项目的目标是提出一种基于图像处理技术的自动焦度测量方法,并实现该方法的算法。
具体内容包括:1. 分析焦度测量过程,确定图像特征参数。
2. 设计算法模型,实现图像处理中的自动焦度测量。
3. 实现算法并对实验结果进行分析与评估。
四、技术路线本项目的技术路线主要包括以下几个方面:1. 图像处理技术:包括图像特征分析、预处理、分割及特征提取等技术。
2. 算法设计:根据图像特征参数设计算法模型,并对算法进行优化。
3. 系统实现:使用编程语言实现算法及相关程序,完成系统集成。
4. 实验评估:对算法进行实验评估,并分析和总结实验结果。
五、预期成果本项目的预期成果包括:1. 基于图像处理技术的自动焦度测量方法。
2. 相关算法的实现程序。
3. 实验评估结果及分析报告。
六、研究难点本项目的主要研究难点是设计适合于不同场景下的图像处理算法模型,并实现算法的高精度以及稳定性。
七、时间安排本项目的时间安排如下:1. 第1-2周:查阅相关文献,熟悉相关技术及理论基础。
2. 第3-4周:确定算法模型,设计实验方案。
3. 第5-8周:实现算法及程序。
4. 第9-10周:进行实验评估,并分析和总结实验结果。
5. 第11-12周:修改与完善实验报告,准备答辩材料。
基于CCD的光学系统焦距自动测量技术
第35卷,增刊红外与激光工程2006年l o月Inf蕊d锄d k盱Engi ne甜ng0瓯2006 V01.35Suppl啪ent基于C C D的光学系统焦距自动测量技术王建伟,安志勇,段杰,王欣(长春理工大学光电工程学院,吉林长春130022)摘要:传统的测量方法测量焦距需要拆卸光学系统,然后由测量人员在光具座上逐项进行现测:记录、数据分析和计算结果等一系列工作,存在着效率低、精度不稳定、对测量人员要求高等缺点.。
高灵敏度低噪声ccD器件的应用和数字图像处理技术的发展,使光学系统焦距数字化测量成为可能。
提出了一种基于ccD 光电法和数字图像处理方法自动测量光学系统焦距的新方法.该方法可实现客观数字化测量.因此可以消除传统的光学系统光学参数测量方法的效率低、精度不稳定、对测量人员要求高等缺点。
使得测量准确度高、自动化程度高。
关键词:光学系统;焦距;ccD;数字化中图分类号:T G84文献标识码:A文章编号:1007.2276(2006)增A.0255.06A ut O m at i c m eas ur i ng t ec hnol ogy of opt i c al syst e mf ocal di s t ance bas ed on C C D10C a I nl St a nC e D aSed O n U L:l JW A N G Ji锄-w ei,A N Z hi-yong,D U A N Ji e,W A N G X i n(co l l o gc of opt o-El∞仃oni c,Ch孤gch姗uni vc巧竹ofSci cncc卸d融Il ll oIogy,ch如gchun130022,C hi na)A bst m c t:’111e仃adi t l ona l m e t hod of m ea sur m g f oca l di St锄ce needs t O di s勰s em bl e t he opt i ca l s yst em,and t hen a ser i es of w or k w i l l be ca rr i e d out on t he opt i ca l t r est l e by t he s ur V eyor’i ncl udi ng obs er V a t i on,re cord,da t a all al y s i s,r es ul t c om put a t i on,锄d s o on.Thi s m e t hod exi st S se V e ra l s hor t com i I l gs,s uch as l ow ef fi ci ency,uns t a bl e pr eci s i on,a11d hi曲er re que st s f or s ur veyor.7r he a ppl i ca t i on of hi g h sensi t i V时and l ow noi se C C D com ponent and t he deV el o pm ent of di gi t al i I l l age pr ocess i ng t echn ol ogy m a ke t he opt i ca l s ys t em f oca l di s t anc e di gi t i za t i on becom e仃ue.A ki I l d of new w ay t o m eas ur e opt i ca l s ys t em f oca l di st a nce a ut om a t i ca l l y is pr opos ed,w hi ch i s b觞ed on C C Dm et hod柚d di gi t al i m a ge pr o ces s i ng m e m od.Thi s m e t hod can achi eve obj ect i ve di gi t i ze d s ur vey.n op t i ca l-e l ect r i ca lc卸el i l Il i nat e t he l a c k of l ow e伍ci ency,unst able pr eci s i on锄d hi gl l e r r eques t s f or s ur v eyor of opt i c s p跏et er m eas uri l l g t echni q ue i I l仃ad i t i on al opt i ca l syst咖,so“i m pr oves t he sun,e y acc I啪掣a nd aut l m at i on pr oce ss.K ey w ords:O pt i cal sys t em;Focal di St an ce;C C D;D i gi t i za t i onO引言在目前广泛应用的光机电一体化仪器设备中,光学系统的性能参数优劣直接影响到整体性能的好坏,为收稿日期:200607.28作者筒介:王建伟(1972.),男。
基于图像处理方法的自动调焦系统的研制
2007年第21卷第1期测试技术学报V o l.21 N o.1 2007 (总第61期)JOURNAL OF TEST AND M EASURE M ENT TECHNOLOG Y(Sum N o.61)文章编号:167127449(2007)0120013204基于图像处理方法的自动调焦系统的研制Ξ刘焕雨1,2,熊文卓1,万秋华1,赵长海1,2,慕志国1,2(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院研究生院,北京100039)摘 要: 介绍了基于图像处理方法的自动调焦系统的组成、工作原理、硬件电路设计和软件设计.该系统的核心是图像处理部分和控制部分.导出了计算聚焦量的三个快速算法公式,优化了系统的实时性能.详细分析了自动调焦的控制过程,并提出了渐变步长的思想,提高了系统的控制精度.实验结果表明,在较宽范围的光照度条件下,应用该系统均能获得良好的调焦效果.关键词: 图像处理;自动调焦;电机驱动控制中图分类号: T P391 文献标识码:AD evelop m en t of Automatic Focusi ng System Based onI mage Processi ng M ethodL I U H uan2yu1,2,X I ON G W en2zhuo1,W AN Q iu2hua1,ZHAO Chang2hai1,2,M U Zh i2guo1,2(1.Changchun Institute of Op tics,F ine M echanics and Physics,the Ch inese A cadem y of Sciences,Changchun130033,Ch ina;2.Graduate Schoo l of the Ch inese A cadem y of Sciences,Beijing100039,Ch ina)Abstract: T he con stitu ti on,op erating p rinci p le,hardw are and softw are of au tom atic focu sing system based on i m age p rocessing m ethod are p resen ted.T he un its of i m age p rocessing and con tro l are the co re of th is system.T h ree speediness arithm etic exp ressi on s fo r calcu lating the focu sed quan tity is in troduced to op ti m ize the real2ti m e perfo r m ance of the system.T he con tro l p rocess of au tom atic focu s is analyzed in detail,and the idea of step length changing gradually is p resen ted to increase the con tro l p recisi on of the system.Exp eri m en tal resu lts show that the system can realize good focu s in a w ider range of illum i2 nance.Key words:i m age p rocessing;au tom atic focu s;drive and con tro l of electric m ach ine在光测系统中,调焦问题越来越受到人们的普遍重视,它直接影响光测设备的测量结果.对光学镜头进行手动调焦,其调节过程长,人的主观因素对调焦精度的影响较大.自动调焦方法主要分为两种[1]:①测距法,包括三角测距法、激光测距法、红外测距法和超声测距法等,通过测量镜头和被摄目标之间的距离,计算出聚焦位置并驱动调焦机构调焦.采用这类方法的仪器一般体积较大,价钱较贵,同时对于红外测距和超声测距的调焦方法,当被测目标对红外或超声波有较强吸收作用时,将使测距系统失灵或调焦不准确.②聚焦检测法,可以分为两类,一类是针对点目标或平行光成的模拟图像的,如相位法和临界角法等,这些方法大都需要额外的光电检测仪器;另一类是依据被测目标的光学图像,用计算机作数字图像采集和数字图像处理的,这样就可充分利用计算机处理数字信号的高速度和灵活性[2,3].所研Ξ收稿日期:2006207219 作者简介:刘焕雨(1979-),男,博士生,主要从事光电检测及视频图像处理研究.制的系统,运用计算机硬件技术和图像处理技术,进行图像的实时处理和调焦机构的精确控制,实现了基于图像处理方法的监察相机自动调焦.该系统结构紧凑、轻便且具有较强的环境照度变化适应能力.1 基于图像处理的自动调焦原理和系统总体设计一副图像是否聚焦,反映在空域上是图像的边缘及细节是否清晰,而图像的边缘及细节信息可以通过对图像进行微分来获取,因此,可以利用这些信息作为聚焦的判据.这种提取图像边缘信息的函数称为聚焦评价函数[4],图像经其处理后所得到的量值能够反映图像的清晰度.聚焦评价函数应具有以下几个特性:无偏性、单峰性、高灵敏度、较高信噪比、计算量较小.这里选用绝对方差函数R =≤M -1j =1≤N -1i =1f (x i ,y i )-f (x i -1,y j ) +≤N -1i =0≤M -1j =1 f (x i ,y j )-f (x i ,y j -1) ,(1)式中 M ,N 为视频图像的行数和列数;i ,j为像素的位置;对比度R 的量值越大,表示图像越清晰,也即对焦越好.相机的视频信号分为两路,一路送监视器显示,一路送图像处理及控制卡进行视频处理,如图1所示.图像处理及控制卡对每一帧图像进行实时处理,判断成像是否清晰(对焦是否准确),并给出反馈信号控制直流电机旋转,进而驱动调焦机构运转,实现镜头的自动调焦.电视监视器用于观察调焦效果,PC 机用于获取图像处理及控制过程的中间数据,进行状态检测和分析.2 图像处理及控制卡的硬件和软件设计图像处理及控制卡的硬件组成如图2所示.2.1 视频解码及图像数据的存储和读取视频解码芯片选用Ph ili p s 公司生产的SAA 7111A [6],应用此芯片将PAL 制式CVB S 信号和Y C 信号解码成YUV 4:2:2数据格式.在此工作方式下,V PO [15:8]引脚输出并行的8位图像灰度值数据Y ,同时输出场同步信号V S 、行同步信号H S 、奇偶场信号R ES 1和像素时钟信号LL C 2,配合数据信号的进一步处理.芯片的功能配置由内部的32个控制寄存器设定,这些寄存器的初始化通过I 2C 总线来完成.设计通过D SP 的两支通用I O 引脚模拟I 2C 总线,传送用户配置数据,图3给出了I 2C 总线的数据传输格式[6].41测试技术学报2007年第1期图像数据的存储和读取按照并行流水操作的思想设计.电路原理图如图4所示.当一片外部存储器,如SRAM 1存储完一场图像数据后,向D SP 发送中断信号,通知D SP 读取数据,并由双路切换器将FPGA 中同SRAM 1间的连线切换至SRAM 2,开始存储下一场图像数据,与此同时,双路切换器将D SP 同SRAM 2间的连线切换至SRAM 1,D SP 响应中断后从SRAM 1读取数据并处理.由于SRAM 以16位宽度进行数据的存取,而视频解码芯片输出的图像灰度数据是8位宽度,为了充分利用存储器的存储空间和提高数据存取的效率,利用数据合并缓存器将两个8位图像数据合并为一个16位数据.合并过程包含两个像素时钟周期,第一个时钟周期将数据缓存,第二个时钟周期将先后到达的两个数据合并后锁存,输出至双路切换器.地址产生及控制模块对像素时钟脉冲进行计数,产生图像数据的存储地址,经锁存后输出给双路切换器.由于采用两数据合并后统一向外部存储器写入的方式,每两个像素时钟周期图像数据的存储地址值加1.此模块向数据合并缓冲存储器提供输入、输出使能信号和时钟信号,向双路切换器提供总线切换信号.2.2 聚焦评价函数的运算和调焦过程的控制在D SP 内存中开设一块图像数据的存储区域,两行图像数据大小,以数组形式T abel [2][M ]表征,如图5所示.聚焦量计算的程序如图6所示.其中的式(2)~(4)由式(1)导出R =≤1i =0≤M -1j =1T ab le[i ][j ]-T ab le[i ][j -1] +≤M -1j =0 T ab le[1][j ]-T ab le[0][j ] ,(2)R =≤M -1j =1T ab le[0][j ]-T ab le[0][j -1] +≤M -1j =0 T ab le[1][j ]-T ab le[0][j ] ,(3)R =≤M -1j =1T ab le[1][j ]-T ab le[1][j -1] +≤M -1j =0 T ab le[1][j ]-T ab le[0][j ] .(4) 光学镜头的调焦机构从一端运动至另一端,所对应图像的聚焦量曲线如图7中的实线所示.x 坐标表示调焦机构位置,y 坐标表示相应位置图像所对应的聚焦量,曲线上P 点对应于聚焦位置视频图像的聚焦量.调焦的目的就是使调焦机构自动寻找并停留在最大值P 点处.在自动调焦的控制过程中,引入变步长的思想,并将调焦过程分为三个状态:a .微动扫描;b .大步长快速调焦;c .渐小步长聚焦.自动调焦系统的控制过程如图7所示.当相邻图像的聚焦量值对比小于一定域值时,目标景物及光学镜头的状态相对稳定,此时控制系统处于微动扫描状态,控制输出仍有使调焦机构向获取更大聚焦量图像方向运动的趋势,但控制量微小.51(总第61期)基于图像处理方法的自动调焦系统的研制(刘焕雨等)图7 自动调焦系统的控制过程F ig .7 Contro l p rocess of autom atic focusing system 当相邻图像的聚焦量值对比大于一定域值,表明目标景物发生了变化,或光学镜头进行了变倍、转向等操作,则控制系统进入大步长快速调焦过程.假定此时调焦机构位于点M 处,首先确定搜索方向,因点N 的聚焦量值大于点M 的聚焦量值,即确定向点N 方向行进,直到越过最大值P 到达P 1为止,即路径为M -N -P -P 1,将此过程中最大聚焦量值P ′暂存,进入渐小步长聚焦过程.由P 1开始,向山顶P 运动,直到P 2为止,将此次搜索中最大聚焦量值P ″暂存.如此反复,每搜索一次,步距相应减小,并将相邻两次搜索中所获得的两个最大聚焦量值进行对比,当对比值小于一定域值时,表示调焦机构已经位于很接近点P 的位置,进入微动扫描状态.利用D SP 2812的脉宽调制功能,输出PWM 控制波形,经功率放大后驱动直流电机旋转,从而实现对光学机构的调焦控制.3 实验结果及结论应用所研制的系统,分别在傍晚时刻的较低照度环境和上午时刻的较高照度环境下,进行自动调焦实验,并用图像采集卡采集自动调焦后图像,自动调焦系统的应用效果如图8所示.从采集到的某建筑工地图像来看,在较低照度环境及较高照度环境下,都能够获得清晰图像,建筑物轮廓显著,有较高对比度,窗子等细节特征丰富明显,说明自动调焦比较精确,能够满足视频监察和图像采集的要求.图8 自动调焦系统的应用效果图F ig .8 A pp licati on effect of autom atic focusing system通常情况下,被观测目标只是图像中的某一个局部,如何使得目标部分的图像清晰度最佳,而不是整幅图像总体上清晰等问题的解决,有待于进一步深入地研究.参考文献:[1] 杨再华,李玉和,李庆祥,等.微操纵系统自动调焦方法的研究[J ].计算机测量与控制,2005,13(1):30232.Yang Zaihua ,L i Yuhe ,L i Q ingxiang ,et al.R esearch of autofocus techniques in m icrom ani pulato r [J ].Computer M easurem ent &Contro l ,2005,13(1):30232.(in Ch inese )[2] 任四刚,李见为,谢利利.基于灰度差分法的自动调焦技术[J ].光电工程,2003,30(2):53255.R en Sigang ,L i J ianw en ,X ie L ili.A utom atic focusing technique based on gray scale difference m ethod [J ].Op to 2E lectronic Engineering ,30(2):53255.(in Ch inese )[3] 李开端,赵育良.基于面阵CCD 的航空摄影高度自动测量及调焦[J ].测试技术学报,2002,16(3):1962199.L i Kaiduan ,Zhao Yuliang .T he autom atic heigh t m easurem ent and focusing of an aerial pho tograph ic cam era based on area 2array CCD [J ].Journal of T est and M easurem ent T echno logy ,2002,16(3):1962199.(in Ch inese )[4] 赵辉,鲍歌堂,陶卫.图像测量中自动调焦函数的实验研究与分析[J ].光学精密工程,2004,12(5):5312536.Zhao H ui ,Bao Getang ,T ao W ei .Experi m ental research and analysis of autom atic focusing functi on fo r i m aging m ea 2surem ent [J ].Op tics and P recisi on Engineering ,2004,12(5):5312536.(in Ch inese )[5] 杨磊,李峰,沈忙作.闭路电视监控系统[M ].北京:机械工业出版社,2003:26230.[6] T exas Instrum ents L td .TM S 320X 28X Enhanced P WM M odule [Z ].T exas ,U SA :T exas Instrum ents Inc ,2004.61测试技术学报2007年第1期。
基于CCD图像处理方法自动定焦仪的研究
基于CCD图像处理方法自动定焦仪的研究
许荣杰;徐聪;雷韬;王强
【期刊名称】《实验室科学》
【年(卷),期】2010(13)1
【摘要】实验室测透镜焦距的传统方法是由测量人员在光具座上观测、记录、数据分析和计算结果,而用肉眼观察和判别往往容易产生差错.该文提出了一种基于CCD的数字图像处理方法自动测量透镜焦距的新设计--自动定焦仪,自动聚焦系统利用图像清晰度评价函数,由单片机控制马达转动镜头至对焦清楚的位置,实现数字化测量.
【总页数】3页(P150-152)
【作者】许荣杰;徐聪;雷韬;王强
【作者单位】天津大学精仪学院,天津,300072;天津大学精仪学院,天津,300072;天津大学精仪学院,天津,300072;天津大学精仪学院,天津,300072
【正文语种】中文
【中图分类】TP753
【相关文献】
1.自动单色仪数据处理方法研究 [J], 乔道鄂;谷玉海;徐小力;孙志永
2.电导法硫自动分析仪测定焦炭中的硫含量 [J], 罗恩斯;张婷婷
3.基于程控多齿分度台和CCD图像处理的经纬仪自动检定 [J], 刘学明;陈建端
4.基于Vega Prime的光电经纬仪CCD图像仿真系统 [J], 杨帅
5.U形渠道自动测流仪数据处理方法研究 [J], 崔岩;郝红科;张志昌;肖宏武
因版权原因,仅展示原文概要,查看原文内容请购买。
基于线阵CCD的光学测角嵌入式系统设计
基于线阵CCD的光学测角嵌入式系统设计程瑶;赵建;米曾真【摘要】CCD作为一种光电转换器件,具有成本低、结构简单、扫描速度快、频率响应高等优点,越来越广泛地运用到测量领域.提出采用单色线阵CCD,以非接触的光学方式对角度信息进行编码调试,通过采集该信号利用数据处理模块,完成对图像信号的解调,实现角度值的测量.系统选用TSL1401和LPC2138为核心构成嵌入式测量系统,利用TSL1401采集信号,通过A/D传输到LPC2138中进行数据处理,最终得到角度值.系统通过光学的方式对角度进行测量,实现了非接触式测量.【期刊名称】《应用光学》【年(卷),期】2018(039)005【总页数】5页(P650-654)【关键词】非接触测量;角度测量;线阵CCD;LPC2138【作者】程瑶;赵建;米曾真【作者单位】重庆理工大学机械工程学院,重庆400050;重庆理工大学机械工程学院,重庆400050;重庆理工大学机械工程学院,重庆400050【正文语种】中文【中图分类】TN203引言角度测量是计量科学的重要组成部分,也是空间几何量测量中的重要组成部分[1]。
在很多情况下角度参数都是一个需要确定的重要物理参量,在工程领域中有着广泛的应用,例如:道路桥梁路面检测、机器人技术、设备安装、高塔或高楼监测、桥梁与大坝监测等[2]。
角度测量在国民经济和国防建设中具有重要的作用,是工业生产质量控制中至关重要的一个环节[3]。
鉴于人类身体的限制以及特殊条件下都需要进行非接触测量,因此在角度测量领域里,非接触测量方法尤为重要。
随着激光技术及CCD技术的发展,激光器及CCD 器件已相当常见,并被广泛应用于各个领域,两者相互配合,可以解决一般工程中微小角度的精确测量[4]。
CCD的光电转换性能可以有效地利用光进行测量,是一种很有效的非接触测量手段。
光学测角方法由于具有非接触、高准确度和高灵敏度的特点而备受人们的重视[5],因此在非接触测量领域中CCD有很广泛的应用。
自动焦度计光电检测系统
一. 目视式焦度计
2
光学系统由带有十字标记划分板的准直物镜和望远镜系统组成。在被测镜片 置入仪器光路时,移动标记分划板,通过望远镜清晰见到十字分划像后,读取被测镜片的光 学参数。这类仪器国内外均有商品,用于眼镜行业已较普遍。如日本的 Topcon 公司的 LM 型,LM-T3 型,Nikon 的 OL-5A/5S 型和 Zeiss 的顶点屈光度计等。国产型号有 D6Y-1 型、BJC-1 型、QY-II 型、CCQ-I 型。
丽水学院 毕业论文
(2009 届)
题目 指导教师 院系 班级 学号 姓名
自动焦度计光电检测系统 数理学院(物理系)
方
晓
慧
目录
1 引 言 .............................................. 2 1.1 课 题 的背 景 及 意义 .................................. 2 1.2 焦 度 计的 现 状 及分 类 ................................ 2 2. 自 动 焦度 计 的 设计 原 理 ............................... 4 2.1 焦 度 计中 的 概 念与 定 义 .............................. 4 2.2 顶 焦 度计 算 推 导.................................... 4 2.3 光 学 实现 原 理...................................... 6 3 系 统 总 体设 计 方 案.................................... 7 3.1 总 体 设计.......................................... 7 3.2 叉 丝 中心 位 置 检测 .................................. 9 4. 硬 件 电 路的 设 计 .................................... 11 4.1 S3C44BOX 简 介 .................................... 11 4.2 LED 驱 动电 路 ..................................... 15 4.3 键 盘 接口 电 路..................................... 16 4.4 步 进 电机 接 口 电路 ................................. 16 4.5 打 印 机驱 动 电 路................................... 17 4.6 CCD 采 样电 路 ..................................... 18 4.7 地 址 译码 电 路..................................... 21 5 测 量 流 程及 程 序 设计 ................................. 22 5.1 测 量 流程......................................... 22 5.2 峰 值 检测......................................... 23 5.3 程 序 设计......................................... 23 5.4 误 差 分析......................................... 25 6 结 论 .............................................. 26 参 考 文 献 ............................................. 27 英 文 翻 译 一 ........................................... 29 英 文 翻 译 二 ........................................... 40
一种图像处理的全自动焦度计
光电工程
Opto-Electronic Engineering
Vol.39, No.3 March, 2012
文章编号:1003-501X(2012)03-0034-06
一种图像处理的全自动焦度计
赵俊奇,郭智勇,闫 洁
( 中北大学 光电厂,太原 030051 ) 摘要:为了提高全自动焦度计的测量精度和适应性,提出了一种测量图形和计算方法。该研究方法是首先利用脉 冲恒流驱动的红外光将 16 点图像经光学系统投射到面阵 CCD 上, 然后经高速 CPU 系统采集处理, 变成二值化图 像,最后用最小二乘法计算出镜片的屈光参数。实验用标准镜片、划伤镜片和镜片落灰尘进行了测试,同四点测 量图像进行了比较,实验结果表明标准镜片误差小于国家计量规定屈光度检查最小误差±0.06 D,且都符合国家计 量标准,划伤镜片和镜片落灰尘时测量精度明显提高,环境适应性也大大提高。 关键词:自动焦度计;16 点图像;最小二乘法;图像自适应积分技术 中图分类号:TB96 文献标志码:A doi:10.3969/j.issn.1003-501X.2012.03.007
收稿日期:2011-10-18; 收到修改稿日期:2011-11-22 基金项目:科技部中小企业创新基金 (11C26211404145) 作者简介:赵俊奇 (1969-),男(汉族),山西太原人。高级工程师,硕士,主要研究光电检测、智能仪器测量。E-mail:qijunzhao@。
பைடு நூலகம்
第 39 卷第 3 期
赵俊奇,等:一种图像处理的全自动焦度计
35
实际上每个 LED 照亮 “米” 字相当于计算一个点, 也就是说相当于在 CCD 上成了 5 个点的像, 但线阵 CCD 上成像的数据有限,需要使用电机补偿实现调焦精确测量,虽然精度高,但增加了机械成本和光学零件加 工装配难度。基于投影原理的全自动焦度计目前以美国恒富利公司为代表,采用 4 点图形(如图 2 所示), 通过光学系统在面阵 CCD 成像,能够获取比线阵 CCD 更多的测量数据,再经电子系统计算处理,实现测 量,由于采用投影技术,每个点在 CCD 上成像数据多,不需要机械补偿。这种原理的焦度计的优点是测 量速度快、成本低。缺点是当光学分划板有灰尘或划伤镜片造成点局部变形,严重影响测量结果。 本文基于投影原理的全自动焦度计,提出了一种 16 点测量方法(如图 3),研究了屈光参数计算方法和 图像处理实现方法,测量精度和环境适应性较国内外同类技术有很大提高[1-3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
科技部科技成果重点 推广项 目( 0 E 00 4 2 3 C 0 8) 0
太 原市 科 技 创 业 种子 基 金 (8 14 0 2 1 1
和形状会发生变化 。通过C D C 接收和微机对图像位
置形状 的处理 ,可 得到被 测镜 片 的相 关参数 。
园圈弱圆
技术交流
准直透镜 待测镜片 分光光 阑 成像透镜 CD C 成像 面
收稿 日期 : 0 1 0 — 8 2 1- 5 1
图 1 自动焦 度计 的光 路 原理 图 。点 光源 发 出 为
的光 ,经 准 直 镜 准 直 ,照射 到 被 测 眼镜 片上 发 生
偏 折 ,再 经 过分 光 光 阑和 测量 透 镜投 射 到C D , C 上
在 C D上得到 含有数 学模 型 的图像 。 由于被 测镜 片 C 的屈光 状态 不一样 。在 C D C 上所 成像 的大小 、位 置
x - ls OoO lD) l y= i e s — 2 = n
由方程 ()% (l , + X22 2 I一ly)+ / - )22 2 y2 % - X T +
.
一
D 一l ,- y 2 X+y E (+ ) V(-, + z22 =X y X ) 22 2 l 匦
调焦原 理 的焦度计 多采 用高分 辨率 、双线 阵C D C 获 取光 路 信 号 ,通 过数 字 信 号 处 理 系统 进行 信 号 采 集 、分析 和 计算 ,并 驱 动步进 电机进 行 自动 对焦 , 从 而得 到 镜 片 的 相关 参 数 。基 于 投影 原 理 的 自动
1 全 自动焦 度计 光 学 算 法 推 导
在y 轴方 向上 的距 离 为 。假 设D 、D 分 别 为 柱 面
样 板上 设 置一 存储 器 ,将 转 换完 的数据 暂 存一 下 ,
以供 F G P A系 统 读 取 。 当 光 路 中 无 测 量 镜 片 时 ,
F G 读 取 C D的采集 数 据 ,计算 出光 斑 的中 心位 PA C 置 ,并 将 计 算 结 果 作 为 系 统 的初 始 参 数 。 当光 路 中插入 被测 镜片 时 .分划 板在C D 的成 像位 置将 C上
《 《技术交流 《
d i O 9 9 .s . 6 - 7 52 1 .9 l o: . 6/ i n1 3 4 9 . 1 . l 3 js 5 0 0 O1
基于C D 6 C 1 点数学模型 的全 自动焦度计 光学 图像系统 的设计
崔 亮飞
( 中北 大学光 电厂 ,山西 太原 0 05 ) 3 0 1
广
0+0 + 3 0 1 2 0+ 4
= —
一
将 1 个光 斑 按 图3 线 所 示分 成 四组 。 分别 求 出 6 虚 方 向或 者y 向上 两个 像点 之 间的距 离 ,即可 得 到 方 被 测球 镜 的顶 焦度J 。设 四组光 斑 求 出 的顶焦 度 s 值
_ 广
(0 1)
2 全 自动 焦 度计 的 图像 处 理 系 统
片是否正确安装在镜架 中的精密光学计量仪 器 。 焦度 仪 又 称 屈 光度 计 、镜 片 测 度 仪 ,广 泛 应 用 于
医 院眼科 、眼镜店 和镜 片厂 家 。 目前 , 国 内生产 的 自动 焦 度 计 主 要 基 于 两 种
测量 原 理 : 自动 调 焦原 理 和 投 影 原理 。基 于 自动
O=1 s n X 1 i~ 2
乏 j 棼遵 j I
图 1 自 动 焦 厦 计 光 路 原 理
c= D= / D一 :、
() 8
其 余 三 组 光 斑 的计 算 方 法 同 上 ,在 这 里 不 再 累 述 。不 防设 四组 光 斑 计 算 出 的柱 面 镜 顶 焦 度值 为 C 、 、C 和 C ,轴 角为 0、0、0和0,则 柱 面 。 2 3 4 镜 的顶焦 度C 和轴 角 为 值
计 ;该 测 量 系统 的 技 术 指 标 已达 到 国 家相 关 检 验 标 准 。
关键 字 : 自动 焦度计 ;1 点数 学模 型 ;F G 6 P A;面阵C D C
焦 度仪 主要用 于测 量 眼镜镜 片 ( 括 角膜接 触 包
镜 片和 多焦 点镜 片1的顶 焦 度 、柱镜 度 、棱镜 度 、
C D、A D、A 单 片机 和F F 存 储 器组 成 ,主要 C / VR IO
J
●
r‘
, r
。
-' ・ ● -- 一・ %
负 责采 集 数 据 并 将 数 据存 储 到F F IO存 储 器 ;数 据
处理 系 统 由F G P A、L D、FF 存 储 器 、键盘 、和 C IO L D光源组 成 .主要 负责 对采 集 的数据 进 行分 析和 E 计 算 .并将 计算 结果 输 出显示 或打 印 。 C D 面阵 敏感 元件 ,在积分 的时 间 内,C D C 是 C 敏 感 元 件 上 积 累 电荷 ,当 积 分完 毕 ,将 电荷 数 据
发 生 变 化 , 位 置 的 变 化 量 与 被 测 镜 片 的 球 镜 度 和
镜 的两个 主顶 焦度 , 为柱 面镜 的轴 角 。有 以下方
程 成 立
柱 镜度 有 相互 对 应 的 比例 关 系 。F G P A接 收像 的位 ( 2 )
DlD 2y + 2 +2
D 1 D2 x2 + +y 2 2 1 + _ +x y -
置 信息 经变换 后计 算 出被测 镜片 的相 关参 数 。
3 图像 的二 值 化 处 理
() 4 由 上 述 系统 可 以看 出 ,图像 处 理 的好 坏 会 直 () 5 接影 响 测量 的精 度 和 稳 定 性 。 由于 图像 采 集设 备
C D采 用P L 0 C A S ,所 以 系统 要 求 F G P A处 理 一 帧 图
11 全 自动 焦 度 计 的 工 作 原 理 .
焦度计 采用 高分 辨率 面 阵C D获取 图像 。通过F — C P
G 对 图像 位 置形 状 进行 处 理 ,得 到 被 测镜 片 的 相 A 关 参 数 。与 基 于 自动 调 焦 原 理 的 焦度 计 相 比 ,投 影 式 自动 焦 度计 具 有 测 量 速 度 快 、加 工成 本 低 等
图 3 柱 镜 片 成 像 图
依 次 移 出。 由于 电 荷数 据是 微 弱 的模 拟 量 ,须 经 信 号 放 大 ,再 经 A D转 换 得 到 本 系 统 所 需 的数 字 /
量 。为 了减 小 对F G P A的C U的 占用 率 ,在C D采 P C
当被 测镜 片为柱 面镜 时 。C D 的光 斑分 布 图 C上
像 的时 间不 超 过 2 ms 图像 二 值 化 算 法 的选 择 标 0 。 准 为 简 单 有 效 ,易 于 实 现 。 故本 系 统采 用 最 大 类
《
间方 差 阈 值 分 割算 法 。最 大 类 间 方差 法 的基 本 思
技术交流
由:x i P A内存 图像 的质 心 坐标 ,通 过 J i 是F G :  ̄y X
摘 要 :全 自动 焦度仪 光 学 系统是 产 品设计 的核 心 ,为 了提 高 自动 焦度 计 的测 量精 度 。提 出
一 种新 的测 量 图像 。该 图像 在 建立 了1 点数 学模 型 并推 导 了镜 片相 关参 数 的计 算方 法 。该算 6 法将 1 个点 分为 四组进 行 计算 ,并取 各 组计 算 结果 的平 均值 作 为最 终测 量 结果 。根 据 1 点数 6 6 学模 型 的算 法要 求 ,设计 了 ̄F G 和 面 阵C D为核心 的测 量 系统7 1 点 图像 二值化 处理 的 算 XPA C 26 . 法。 实验数 据表 明.该 系统在测 量精度及 稳 定性上 都优 于原有 的基 于4 测量 图像 的 自动 焦度 点
一
想 是 把 图像 中 的像 素 按 灰 度 值 用 阈值 t 成 两 类A 分
和 。A由灰 度值 在0 t 间的像 素 组 成 ,B由灰 度 一之 值 在抖1 — L 图像 灰 度 级 数1之 间 的像 素 组 一L l( 为 成 。按 下式计算A和 之 间的类 间方差 8( W ( [At M ) + 0 【n ) M ] 2 0= A ) ( 一 0】 e ) 一 ( tu ) )
如 3 示 。 由于柱 面镜 含 有 两 个 主 顶 焦 度 ,因此 , 所
1个 光 斑 成不 对 称分 布 。现 以其 中一组 光 斑 f个 6 4 测量点 )为例 推导 柱 面镜 主顶焦 度 的计算 方 法 。设 点 与C 在 轴方 向上 的距 离 为 ,在 】 方 向上 点 , 轴 的距离 为Y ;设B 点与D 在 轴 方 向上 的距 离为 , 点
i ‘ , .
‘
、
、
.
一
- . , , i 1 F! . 、 、 .
’ .
l. 、 i
. 一 一
, ’
.
●●
D
一
C
I ●
一二
f . . l
1
. 、 .
、
▲ .一 .
一
。≯
一 一 . ● .
,
J
图2 0 D成 像 图
式 中钮 t ( )为A中所 包 含 的像 素 数 ,W f ( )为曰
( t )为A中所 有 像 素 的平 均
灰 度 值 ,U 为B中所 有 像 素 的 平 均 灰 度 值 。u B( 为 全 图的平 均 灰度值 。
从0 一 1 次 改 变t ,取使6 ( 到 依 值 t 最 大 的t )为
文 中所 研 究 的 焦度 计 是 基 于 投 影原 理 的 自动
焦度 计 。但 是 ,与 国 内 同类 产 品 不 同 的是 ,本文