电液比例位置控制系统的新型PID控制算法研究
毕业设计28第五章 电液比例液压控制系统控制策略研究及实验分析

第五章电液比例液压控制系统控制策略研究及实验分析图5-1 程序框图§5.1 电液比例液压控制系统的增量式PID 控制研究由第二章分析可知,Beringer 生产的电液比例液压控制系统的许多硬件参数都不能准确确定和许多不确定因素的影响,要想准确用数学模型来描述该系统的动态特性是非常困难的,因此提出利用PID 算法对系统进行控制。
由于PID 控制器不需要知道控制对象的具体传递函数,算法简单、易于调节等优点,在工业控制中得到了广泛应用。
在前一章分析电液比例液压控制系统的动态模型时,对系统模型的PID 控制的仿真结果表明,由于本系统具有较好的开环稳定性,而系统的变化较为平缓,所以应用PID 控制算法就可能获得较好的输出。
在本文的实验中,利用增量式PID 控制算法,对系统在不同的温度、压力等工作条件下的运行进行了实验研究,大量实验表明该算法的有效性。
在实验中采用了增量式的PID 控制算法。
其控制系统原理框图如图5-2所示:PID 控制器是一种线性控制器,它根据给定值r (t) 与实际输出值c (t)构成控制偏差:)15()()()(--=t t t c r e其控制规律:)25(1)()()(-⎥⎦⎤⎢⎣⎡++=⎰tD t I t P t dt dt T dt e T e K u式中 K P : 比例系数;T I : 积分时间常数;T D : 微分时间常数。
简单说来,PID 控制器各校正环节的作用如下:1.比例环节:即时成比例地反映控制系统的偏差信号 e (t),偏差一旦产生,图5-2 控制系统原理框图控制器立即产生控制作用,以减少偏差。
增大比例系数可加快系统响应,有利于减小静差,但会是系统有较大的超调,产生振荡,稳定性变坏。
2.积分环节:主要用于消除静差,提高系统的无差度。
积分作用的强弱取决于积分时间常数T I ,T I 越大,积分作用越弱,可使超调和振荡下降,但消除系统静差也减慢。
3.微分环节:能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
基于PID算法的电液伺服阀速度控制系统的研究

浅析基于PID算法的电液伺服阀速度控制系统的研究摘要:本文主要是结合液压传动技术和自动控制技术,设计一种基于pid算法的电液伺服阀速度控制器。
液压系统在机械传动方面有着十分重要的应用,尤其是其具有传动过程中工作稳定、传递功率负荷大、传动能量方向灵活可控、调节控制方便等等优势,非常适合在机械制造、工程机械、大型交通工具等场合应用。
关键词:plc;控制系统;pid;电液伺服系统是液压自动控制领域中的一门重要研究技术,由于其具有良好、快速、高精度的控制效果和能量,该技术其应用面非常广泛。
近年来,随着计算机技术的迅猛发展和在自动控制领域的应用,如何将计算机控制技术应用于液压伺服控制已经成为人们研究的重点和热点。
本文主要讲的是如何设计出一种基于pid算法的电液伺服速度控制系统。
1、系统工作原理及参数电液伺服阀速度控制系统是通过电液伺服阀控制两柱压力机匀速上升或下降的高精度控制系统,由电气控制部分和液压驱动部分组成。
系统工作原理如下:当上位计算机实现上升或下行功能时,对控制器发出下行指令,控制器根据位置传感器及速度反馈回路的信号输出相应的控制信号,经伺服阀放大器驱动电液伺服阀输出相应流量,在电机、液压回路系统等相关执行机构作用下,两柱压力机油缸匀速上升或下降;系统的控制核心为由控制器、电液伺服阀、反馈回路构成的闭环控制系统。
1.1 伺服阀电液伺服阀速度控制系统的核心元件是伺服阀,系统中采用的伺服阀是中船重工上海704所生产的csdy1/2型伺服阀。
csdy1csdy2电液伺服阀结构牢固、分辨率极高、控制精度高适用于各领域的高精度电液伺服系统。
如:造船工业、航天工业、航空工业、重工业、轻、纺工业,以及农业机械液压伺服系统。
csdy1csdy2电液伺服阀工作时,高压油ps一路通过滤油器进入射流管喷嘴,另一路进入阀芯和阀套组成的通路。
当无信号电流时,阀处于零位,无流量输出。
当有控制信号电流输入时,使射流管喷嘴偏转(设顺时针),接受器左腔压力上升,右腔压力下降,阀芯在压差作用下右移,其油路ps-a-1负载-2-c-p。
新型电液比例阀的设计及其控制方法的研究

新型电液比例阀的设计及其控制方法的研究
Key Words: Electro-hydraulic proportional pressure valve; CFD; PID algorithm; PWM; Steady-state model; Dynamic Model; Simulation
IV
湖 南 大 学 学位论文原创性声明
本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取 得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其 他个人或集体已经发表或撰写的成果作品。 对本文的研究做出重要贡献的个 人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果 由本人承担。
湖南大学 硕士学位论文 新型电液比例阀的设计及其控制方法的研究 姓名:黄勇 申请学位级别:硕士 专业:机械制造及其自动化 指导教师:胡思节 20070410
新型电液比例阀的设计及其控制方法的研究
摘
要
电液比例阀是实现电液比例控制技术的关键控制器件。由于其较好的控制精 度和稳定性,电液比例阀已开始逐渐代替传统控制阀。 电液比例压力控制阀是电液比例阀中的一种,其功用是对液压系统中的油液 压力进行比例控制,进而实现对执行器输出力或输出转矩的比例控制。论文在参 照国内外成熟产品的基础上,运用现代设计方法和分析手段设计了一种新型比例 压力阀的结构。首先,设计了十几种阀芯和阀腔的几何结构 , 根据计算流体力学的 理论,对每一种阀的流道建立数学模型。其次,借助商业软件 ANSYS/FLOTRAN 和 CFX 求解流道中的速度、压力数值解 , 根据求解的数据 , 分析出阀内流道的几何形 状对流场的影响。最后 , 根据所得结论优化出一种新型的阀芯和阀腔结构。 在比例压力阀的控制电路设计中, 以单片机控制系统、 数字 PID 算法和 PWM ( 脉冲宽度调制 ) 技术为研究对象。根据电液比例阀的控制要求,编制了系统控制 程序,设计了单片机控制系统的电路和功率放大电路,使控制电路的精度和可靠 性大大提高。 将阀的工作状态抽象成数学模型是研究现代液压系统的主要方法。论文运用 运动学和动力学理论,建立了所设计的电液比例压力阀的稳态和动态数学模型, 得到了系统的传递函数。另外 , 求解系统模型中的参数成为一个重要问题,论文中 同样以计算流体力学为理论依据,通过有限元等数值方法,计算出流量系数等重 要参数。为了研究阀的稳态、动态特性,将传递函数转换为 MATLAB/SIMULINK 软件包的方框图模型,利用计算机仿真技术得到阀的阶跃输入响应。然后,研究 了不同结构对阀稳态与动态特性的影响,为进一步优化阀的结构提供了理论上的 参考依据。 关键词:电液比例压力阀; CFD ; PID 算法;脉宽调制;稳态模型;动态模型; 仿真
卷扬升降机电液比例阀控马达系统PID控制及仿真
卷扬升降机电液比例阀控马达系统PID控制及仿真PID控制是一种线性控制,将设定值w与实际输出y进行比较构成偏差e=w-y并按其比例、积分、微分通过线性组合构成控制量。
在实际应用中,根据对象的特性和控制要求,也可灵活地改变其结构,取其中一部分环节构成控制规律。
1 PID算法由于计算机控制是一种采样控制它只能根据采样时刻的偏差值计算控制量因此微分项和积分项不能准确的计算出,只能用数值计算方法逼近。
数字式的PID控制算法为:u■=k[e■+T/T■■e■+T■/T(e■-e■)]增量式PID控制算法为:△u■=u■-u■=k[e■-e■+T/T■e■+T■/T(e■-2e■+e■)]计算机控制系统采用恒定的采样周期T,故在确定了k、T■、T■后,根据前后三次的测量偏差就可以求出控制增量。
实际上,位置式与增量式控制对整个闭环系统并无本质差别,只是将原来全部由计算机承担的算式,分出一部分由其他的部件完成。
2 积分分离PID控制阀控马达系统在控制过程的启动、结束或大幅度增减设定时,短时间内系统输出有很大的偏差,会造成PID运算的积分累加,致使控制量超过执行机构可能允许的最大动作范围对应的极限控制量,引起系统较大的超调,甚至引起系统较大的振荡。
采用积分PID控制算法,当被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统的稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除静差,提高控制精度。
其基本思想是:根据系统情况设置分离用的门限值(也称阀值)A。
当偏差大于规定的门限值A时,删除积分作用。
当偏差值比较小时,采用PID控制,可保证系统的控制精度。
控制算法可表示如下:u■=k■e(k)+βk■■e(i)+k■[e(k)-e(k-1)]式中:β=1,e(k)≤A,采用PID控制;β=0,e(k)>A,采用PD控制。
3 PID调节器参数选择选择调节器的参数,必须根据工程的具体问题来考虑。
自控课程设计-基于PID的电液位置伺服系统分析

基于PID的电液位置伺服系统分析摘要电液位置伺服系统是一种由电信号处理装置和液压动力机构组成反馈控制系统。
它综合了电气和液压两方面的优点,具有控制精度高、响应速度快、输出功率大、信号处理灵活、易于实现各种参量的反馈等优点。
其应用已遍及国民经济的各个领域。
本文主要通过matlab软件中的simulink工具,对电液位置伺服系统进行PID调节,并且利用临界比例度法进行参数整定,采用微分先行的方法对PID控制器进行改良,最终使系统的快速性、稳定性、准确性明显提高。
关键词电液位置伺服系统; PID控制; 临界比例度法; 微分先行Analysis of Electro-hydraulic Position Servo System Based onPIDABSTRACT Electro-hydraulic position servo system is a signal processing unit and the hydraulic power agencies feedback control system. It combines both electrical and hydraulic advantages of high control precision, fast response, high output power, signal processing, flexible, easy to implement various parameters of the feedback and so on. Its application has been throughout all areas of the national economy. In this paper, by using simulink software tools, electro-hydraulic position servo system PID control, and the use of critical ratio method for parameter tuning, using the method of differential forward PID controller for improvement, and ultimately make the system fast, stability, significantly improved accuracy.Key words electro-hydraulic position servo system; PID control; critical ratio method; differential forward1.引言电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。
电液比例位置系统模糊自整定PID控制器设计与仿真研究

20 0 7年第 1 2期
液压与 气动
2 3
电液 比例位 置 系统模 糊 自整 定 P D控 制器 设计 与仿 真研 究 I
郭 振 兴 ,房 建 东 ,房 彦 伟
S m u a i n Re e r h o z y S l- u i D Co r l r Ba e i l to s a c f Fu z e f t n ng PI nt o l s d e o e t o h d a l o o to a sto nt o y t m n El c r — y r u i Pr p r i n lPo ii n Co r lS s e c
GU( h n x n .FANG Ja — o g.FANG Ya — i )Z e — i g in d n n we
( 内蒙古 工业 大学 信息工程学院 , 内蒙 呼和浩特
O05 ) l0 1
摘 要 : 电液 比例 位 置 系统 是一 种 非线性 、 时变性 系统 , 其参 数具 有 非线性 特性 , 用的线 性化模 型 基础 常
关 键词 : 电液 比例 ;模糊控 制 ;参数 自整定 ;系统仿 真
中 图分 类 号 : P 7 . 文献标 识码 : 文章 编号 :0 04 5 (0 7 1.0 30 T 2 32 B 10 .8 8 2 0 )20 2 4
0 引 言
应情况, 用模糊推理 , 运 自动实 现 对 P D参 数 的最 佳 I 调整 , 这就 是模糊 自适应 P D控 制 。 I 将 模糊 控 制 和 P D控 制 两者 结 合起 来 , 具有 模 I 既 糊 控制适 应 性强 的优 点 , 具有 P D控 制 精度 高 的特 又 I 点, 针对 具 有非线 性 、 变 性 的 电 液 比例 位 置 系统 , 时 可 以取得 良好 的 控 制 效 果 。 国 内 外 学 者 采 用 不 同 的 方 法 , 出 了多种模糊 P D控 制策 略 。本 文对 电液 比例 提 I 位 置控制 系 统 应 用 了模 糊 自整 定 P D控 制 器并 与 常 I 规模 糊 P D控 制器进 行 系 统仿 真 研 究对 比 , 真 结果 I 仿 表 明 , 用模 糊 自整定 P D控 制器 控制效 果更 好 。 采 I
电液比例控制系统的参数模糊自整定PID控制研究

() 1
机地结合起来 , 出 了一种 模糊 自整定 PD控制算 提 I 法, 这种算法占用的存储空间小 , 只需少量的 C U时 P 间进 行运算 处理 , 合在单 片机 内运行 。 适
1 P D控 制 的 系统 结构 I
e k— —第 k次误 差信 号 ()
0 引 言
’
行过 程 中不 断地检 测 e Ae根 据模 糊 控 制 原理 对 3 和 , 个控 制参 数进 行在 线 修 改 , 满 足不 同暂 态 过 程对 控 以 制参 数 的不 同要 求 , 而使被 控对 象具 有 良好 的动 、 从 静
态特性 。
电液 比例控 制 系统 已经广 泛应 用于 精度要 求 较 高 的行业 。其 传统 的控 制 方式 大 多 采 用 P D控制 技 术 , I 它具有 简单 、 可靠 、 数整定 方便 等优 点 。但 电液 比例 参 控制 阀 的工 作环 境变 化很 大 , 负载 千差 万别 , 且 电 其 而 液 比例 控制 系统是 复 杂 的非线 性 高 阶 系统 , 难 在 设 很 计 时建立 准确 的数 学 模 型 , 因此 在 控 制性 能要 求 高 的 场 合 , 规 的 PD控 制难 以取 得 良好 的控 制 效果 。模 常 I 糊 控制是 一种 比较 先 进 的控 制 方 法 , 可 以弥 补 常规 它
着 偏差 e和偏 差变 化率 e c的变 化 而变 化 的 , 以必 须 所
首 先 明确两 者之 间 的关 系 。这 种二 元关 系在模 糊 系统
中主要 表 现如下 。
差e 和误差变化率A (c 之间的模糊关系 , e e) 在系统运
在 常规 P D控 制 中 , I 当对 象 的负 载 出现 阶跃 变 化 时, 被调 量 的变化 曲线 会 出现 阻尼 振 荡 , 图 2所示 。 如
电液比例位置控制系统的研究
机床与液压
MACHI NE T 0OL & HYDRAUL I C S
Ap r . 2 01 3
Vo 1 . 4 1 No . 7
D OI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 0 7 . 0 1 1
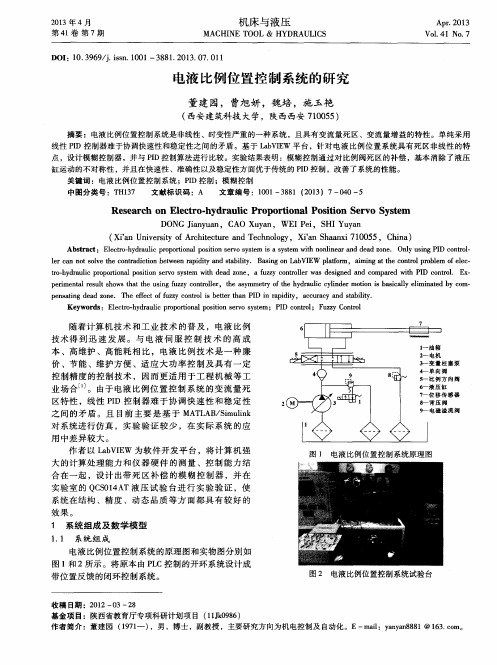
随着计算 机技 术和 工业 技术 的普 及 ,电液 比例
技术得 到 迅 速发 展 。 与 电液 伺 服 控 制 技 术 的高 成
本 、高 维护 、高 能耗相 比 ,电液 比例 技术 是一 种廉 价 、节 能 、维护 方便 、适 应 大功 率控 制及 具有 一定 控制精 度 的控制 技术 ,因而更 适 用 于工程 机械 等工 业场合 … 。由于 电液 比例 位置 控制 系统 的变流量 死 区特性 ,线性 P I D控 制器难 于协 调快 速性 和稳 定性
电液 比例 位 置控 制 系统 的研 究
董建 园,曹旭妍 , 魏 培 ,施 玉艳
1 0 0 5 5 ) ( 西安 建 筑科 技 大 学 , 陕 西 西 安 7
摘要 :电液 比例位置控制系统是 非线性 、时变性严重 的一种系统 ,且具有 变流量死 区、变 流量增益 的特性 。单 纯采用 线性 P I D控制器难于协调快速性 和稳 定性 之间的矛盾 。基 于 L a b V I E W 平 台,针 对电液 比例 位置 系统具有死 区非线性 的特
DON G J i a n y u a n, C AO Xu y a n ,WE I P e i ,S HI Yu y a n
( X i ’ a n U n i v e r s i t y o f A r c h i t e o l o g y ,X i ’ a n S h a a n x i 7 1 0 0 5 5 ,C h i n a )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
过加载油缸给油缸加载指定负载(4 0t , - ) 位移传感 2
器将 液压 缸 活塞 的位置 信息通 过数 据采 集卡传 递 给计
算机与理想位移进行比较 , 得出差值量 , 经过优化处理 和转换输出控制信号 , 通过 比例放大器放大后驱动电 液 比例方 向阀工作 , 而实现 液压缸 位置 的精确 控制 。 从
中 图分类 号 :P7 文 献标 识码 : 文章 编 号 :004 5 (0 2 0 -050 T23 B 10 -88 2 1 )20 1-4
0 引言
现 的 。液 压泵 的供 油压 力为 1 P 。 系统工 作 时 , 5M a 通
随着 现代 工业 技 术 的飞 速 发展 , 液 比例 技 术 广 电 泛应 用 于军 事 、 业 、 农 工业 等各 个领 域 。作 为 电液 比例 技术 的重要组 成 部件 的 电液 比例 阀 以 其成 本 低 、 污 抗 染 能力 强等优 点 , 许 多 场 合 正 逐 步取 代 伺 服 阀。 由 在 计算 机 、 电液 比例 阀和液 压 缸 等 部 件 组 成 的 闭环 控 制
2 1 常规 PD控 制器 结构 . I
常规 PD控制 器是 一 种 线性 控 制 , 是 将 给定 值 I 它 rt ()与实 际输 出值 Y t ()构成 的控制 偏差 et =rt () ()
一
活塞 直径 10mm, 8 活塞 杆直 径 10m 电液 比例方 向 1 m, 阀 7为 4 A E 01B 2 N A M 型 号 电液 换 向 阀 , WR 6 2 —0 /4 Z/ 电液 比例方 向阀 8为 H4WE 2 M x 6 G 4 9 T 4 H5 6/E2NEK-
数 据 的转换 是通 过 1 lA D板 卡 和 12 / 板 卡 实 76/ 71 A D
作者简介 : 强宝 民( 9 4 ) 男 , 16 一 , 陕西礼 泉人 , 教授 , 士 , 硕 主 要从事液压系统仿真 和故 障诊断方 面的研究和教学工作 。
1 6
液压与 气动
21 0 2年第 2期
) K ) ㈤¨ =p + [
写 成传 递 函数 的形 式为 :
Cs = () =K 1+ p 1 +T os
] ( 1 )
差, 但其 容易 导致 积分 饱 和 , 系统 超 调 量 增 大 , 分 使 微 环节可 以提 高响应 速度 , 但其对 高频 干扰 特别敏 感 , 使 系统抑 制 干扰 的能 力 降低 。为此本 文在 常规 PD控制 I 器 的基 础上 做 以下 改进 ] 。
p sto o to y t m o iin c n r ls se
Q A G B om n LU B o i I N a- i , I a -e j
( 第二炮兵工程学院 ,陕西 西安 70 2 ) 10 5
摘
要 : 文设计 了一种新 型 PD控 制 算 法 , 该 I 对其 在 电液 比例位 置控 制 系统上 的应 用进行研 究。在介 绍
新 型 PD控 制 算 法基 本 原 理 的基 础 上 , I 通过 实验 比较 该 系统新 型 PD控 制和 常规 PD控 制 对正 弦信 号的 跟 I I
踪效果。结果表明, 新型 PD控制 比常规 PD控制有更好的精度和稳定性。 I I
关键 词 : 新型 PD控 制 ; I 电液 比例 阀 ; 置控 制 ; I 制 位 PD控
( )对 积分项 的改进 1 改 进 的基 本 方 法 为 : 首 先根据 实 际情况 , 定 阀值 O 卢(t<卢) 当偏差 ej 设 t O 、 , ()
) ( 2 )
系统具有结构简单 、 控制方法灵 活、 控制精 度高等优
点, 在各 个 领 域 得 到 了 广 泛 的 应 用 。 作 者 针 对 常 规 PD控制 器在 电液 比例 位 置 控 制 系 统 中存 在 的问 题 , I 在此 基础 上设 计 了一种 新 型 的 PD控制器 用 以克 服常 I
Yt ()中的比例 、 积分和微分通过线性组合构成控制
量, 对被控对象进行控制 , 其控制规律为 :
收稿 日期 :0 1 61 2 1- -4 0
Z 型号电液换 向阀, 4 压力传感器是 N - 22 T型号 SWL - 0 力传感器 , 量程为 ± 0t位移传感器是 WY C I0 L 2 , D. 0, O
规 PD控制 对 系统 的不利 影 响并进 行 了实验 研究 。 I
1 系统 的组 成及原 理
该 比例 阀控非 对称 液压 缸位 置控 制 系统 的硬件 组 成, 图1 如 所示 。主要 由滤 油器 1和 6 溢流 阀 2 液 压 、 、 泵 3 压 力表 4 单 向阀 5 电液 比例方 向阀 7和 8 配 套 、 、 、 ( 放大器 1 0和 9) 液 压 缸 1 、 载 缸 1 、 移 传 感 器 、 1加 2位 1 、 力传感 器 1 、 据 采 集 卡 和工 业 控 制 计 算 机 组 3压 4数 成 。液压 缸为 单杆 活 塞 标 准液 压 缸 , 压缸 标 准 行 程 液
10 m, 塞直 径 10 m 活塞 杆 直 径 9 00m 活 4 m, 0mm, 载 加 0 0m
图 1 比例 阀控 非 对 称 液 压 缸 位 置 控 制 系统 组成 图
2 新 型 P D控 制器 设计 I
21 0 2年 第 2期
液 压 与 气动
1 5
电液 比例 位 置 控 制 系统 的新 型 PD控 制算 法 研 究 I
强 宝 民 。 保 杰 刘 Ne D c nr lag r h free to h d a l r p rin l w PI o to lo i m o lcr — y ru i p o o t a t c o